Система резервування вимірників тримірного руху транспортних засобів
Номер патенту: 18796
Опубліковано: 15.11.2006
Автори: Журавльова Надія Костянтинівна, Бандура Іван Миколайович, Сагіна Марина Юріївна


Формула / Реферат
1. Система резервування вимірників тримірного руху транспортних засобів, що містить три датчики, осі чутливості яких спрямовані уздовж трьох взаємно перпендикулярних осей зв'язаної системи координат керування транспортного засобу, виходи яких з'єднані з пристроєм контролю датчиків, яка відрізняється тим, що в неї введені чотири додаткових датчики, осі чутливості яких спрямовані вздовж осей косокутної системи координат, що розташовані всередині окремих квадрантів, утворених взаємно перпендикулярними площинами, що проходять через осі зв'язаної системи координат і не співпадають з ними, виходи додаткових датчиків підключені до пристрою контролю датчиків.
2. Система за п. 1, яка відрізняється тим, що пристрій контролю датчиків містить пристрій оцінки і порівняння, виходи якого безпосередньо і через паралельно з'єднані пристрій визначення першого несправного датчика і пристрій визначення другого несправного датчика з'єднані з входами блока формування проекцій керованої координати на осі керування транспортного засобу.
Текст
1. Система резервування вимірників тримірного руху транспортних засобів, що містить три датчики, осі чутливості яких спрямовані уздовж трьох взаємно перпендикулярних осей зв'язаної системи координат керування транспортного засобу, виходи яких з'єднані з пристроєм контролю датчиків, яка відрізняється тим, що в неї введені чотири 3 18796 4 чиків підключені до пристрою контролю датчиків, сигналів 12, 13, 14, 15 цей пристрій визначає по крім того пристрій контролю датчиків містить придва оцінних значення проекцій координат на осі стрій оцінки і порівняння, виходи якого безпосеречутливості датчиків швидкості або прискорення. дньо і через паралельно - з'єднані пристрій визнаОбмірювані й оцінні значення проекцій координат чення першого несправного датчика і пристрій на осі чутливості датчиків швидкості або присковизначення другого несправного датчика з'єднані з рення надходять по зв'язку 24 у пристрій 23 форвходами блоку формування проекцій керованої мування проекцій керованої координати на осі кекоординати на осі керування транспортного засорування транспортного засобу, що при відсутності бу. несправних датчиків формує сигнали 16, 17, 18 і Сукупне застосування введених пристроїв і не формує сигнал 19. зв'язків дозволило оперативно визначати неспраПристрій 20 оцінки і порівняння порівнює обмівні датчики і відключати їх при меншій кількості рювані й оцінний сигнали на всі осі чутливості датдатчиків. Це істотно підвищує надійність, зменшує чиків. вагу й енергоспоживання блоку вимірників і дозвоУ випадку нормального функціонування (при ляє одержати істотний позитивний ефект. відсутності несправних датчиків) обмірювані знаДля пояснення запропонованої системи причення проекцій координат збігаються з відповідниведені креслення, де на Фіг.1 показане запропономи оцінними значеннями проекцій координат. При ване розташування датчиків тримірного руху, а на несправності одного з датчиків пристрій 20 оцінки і Фіг.2 приведена блок-схема пристрою контролю порівняння виробляє сигнали неузгодженості між датчиків. обмірюваними й оцінними значеннями проекцій У розгляд введені дві системи координат: координат, що по зв'язку 25 надходять у пристрій ОХ1Х2Х3 - права прямокутна, зв'язана з транспор21 визначення першого несправного датчика. Притним засобом система координат, осі якої є осями стрій 21 визначення першого несправного датчика керування транспортних засобів по трьох каналах на підставі аналізу сигналів по зв'язку 25 визначає керування і OY1Y2Y3Y4 - косокутна, зв'язана з несправний датчик і по зв'язку 27 інформація про транспортним засобом система координат, осі якої несправний датчик надходить у пристрій 22 визнарозташовані всередині окремих квадрантів, утвочення другого несправного датчика і 23 формурених взаємноперпендикулярними площинами, що вання проекцій керованої координати на осі керупроходять через осі ох1, ох2, ох3 і не збігаються з вання транспортного засобу. Пристрій 23 останніми. формування проекцій керованої координати на осі На кресленнях представлені датчики 1, 2, 3, керування транспортного засобу виробляє сигнали осі чутливості яких спрямовані уздовж осей ох1, 16, 17, 18 з урахуванням несправного датчика і ох2, ох3 відповідно, додаткові датчики 4, 5, 6, 7, осі виробляє сигнал 19 на відключення цього неспрачутливості яких спрямовані уздовж осей оу1, оу2, вного датчика. оу3 і оу4 відповідно, пристрій 8 контролю датчиків, При несправності другого датчика пристрій 20 зв'язки 9, 10, 11 по координатах, обмірюваних датоцінки і порівняння виробляє сигнали, що по зв'язчиками швидкості або прискорення, зв'язки 12, 13, ку 25 надходять у пристрій 22 визначення другого 14, 15 по координатах, обмірюваних додатковими несправного датчика. Пристрій 22 визначення друдатчиками швидкості або прискорення, зв'язки гого несправного датчика на підставі аналізу сиг16,17,18 по проекціях керованої координати на осі налів по зв'язку 25 і 27 визначає другий несправтранспортного засобу, зв'язок 19 по командах на ний датчик і виробляє сигнали 26, 28. Сигнал 26 відключення несправних датчиків, пристрій 20 оцінадходить у пристрій 20 оцінки і порівняння, що з нки і порівняння, пристрій 21 визначення першого урахуванням цього сигналу виробляє сигнали 24. несправного датчика, пристрій 22 визначення друСигнал 28 надходить у пристрій 23 формування гого несправного датчика, блок 23 формування проекцій керованої координати на осі керування проекцій керованої координати на осі керування транспортного засобу, що виробляє сигнали 16, транспортного засобу, зв'язок 24 по обмірюваних і 17, 18 з обліком другого несправного датчика і оцінних проекціях керованої координати на осі виробляє сигнал 19 на відключення цього датчика. керування транспортного засобу, зв'язок 25 по У відомих схемах гарячого резервування, коли неузгодженостях між обмірюваними й оцінними осі чутливості основних і резервних датчиків збіпроекціями керованої координати, зв'язок 26 по гаються з осями керування транспортного засобу, оцінним значенням координати першого несправдля забезпечення працездатності системи при ного датчика, зв'язок 27 за інформацією про пернесправності двох датчиків необхідно чотири комший несправний датчик, зв'язок 28 за інформацією плекти датчиків, тобто дванадцять штук замість про другий несправний датчик. запропонованих семи. У порівнянні з відомою схеЗапропонована система працює в такий спомою гарячого резервування, що має три комплекти сіб. У процесі руху транспортного засобу датчики датчиків, запропонована схема має більш високу 1, 2, 3, 4, 5, 6, 7 вимірюють проекції координат на надійність через працездатність при несправності їхні осі чутливості, сигнали про ці проекції по зв'яздвох будь-яких датчиків. ках 9, 10, 11, 12, 13, 14, 15 надходять у пристрій 8 Нижче приведене коротке математичне обґруконтролю датчиків. нтування працездатності запропонованої системи Пристрій 8 контролю датчиків функціонує в тапри несправності двох датчиків. Для простоти прикий спосіб. На підставі сигналів 9, 10, 11 пристрій пустимо, що направляючі косинуси осей оу1, оу2, 20 оцінки і порівняння визначає оцінні значення 1 оу3 і оу4 з осями ох1, ох2, ох3 однакові і рівні . проекцій координат на осі чутливості додаткових 3 датчиків швидкості або прискорення, а на підставі 5 18796 6 Для запропонованого розташування осей чутливо(де с - постійними, обумовленими погрішноссті датчиків між проекціями координат на осі чуттями датчиків) усі датчики функціонують нормальливості датчиків швидкості або прискорення і доно і пристрій 23 формування проекцій керованої даткових датчиків швидкості або прискорення координати на осі керування транспортного засобу існують наступні співвідношення. по ланцюгах 16,17,18 видає сигнали х1, х2, х3. Порушення однієї з умов (5) указує на неспра1 вність відповідного датчика швидкості або прискоy1 x1 x2 x3 рення. У цьому випадку пристрій 23 формування 3 проекцій керованої координати на осі керування 1 транспортного засобу замість обмірюваного сигy2 x1 x2 x3 3 налу несправного датчика виробляє оцінне зна(1) чення відповідного сигналу. 1 y3 x1 x2 x3 Порушення трьох умов у нерівностях (5), (6) 3 указує на несправність додаткового датчика швид1 кості або прискорення. Для визначення конкретноy4 x1 x2 x3 3 го несправного додаткового датчика швидкості або прискорення перевіряються умови 'y1 y2 y4 y3 'y2 y3 y1 y4 'y3 y4 y2 y1 'y 4 y1 y3 y2 x1 0,5 3 y1 0,5 3 y1 y4 x3 0,5 3 y1 y2 'x1 0,5 3 y2 y4 'x2 0,5 3 y2 y3 'x3 0,5 3 y4 (2) y3 x2 y1 y3 (3) (4) де: x1 , x 2 , x3 , y1 , y 2 , y3 , y 4 обмірювані датчиками проекції координат на відповідні осі, x2 , x1 , x3 , 'x1 , 'x2 , 'x3 , y1 , y2 , y3 , y 4 , 'y1 , 'y2 , 'y3 , 'y 4 - оцінні значення проекцію координат на відповідні осі. Співвідношення (1), (2), (3), (4) реалізуються в пристрої 20 оцінки і порівняння. Порівняння обмірюваних і оцінних значень дозволяє визначити наявність несправних датчиків. При x1 x1 x1 'x1 c, c, x2 x2 x2 'x2 c, c, x3 x3 x3 'x3 c , (5) c , (6) x1 c, y2 y2 c, (7) y3 y3 c, y4 y4 c Порушення однієї з умов (7) вказує на несправність відповідного додаткового датчика швидкості або прискорення. Після цього у формулах (3) і (4) замість обмірюваного значення використовується відповідне оцінне значення, розраховане по формулі (2). У випадку несправності додаткового датчика швидкості або прискорення пристрій 23 формування проекцій керованої координати на осі керування транспортного засобу по колишньому видає обмірювані значення датчиків швидкості або прискорення. При несправності одного датчика виключається з розгляду та з умов у нерівностях (5), (6), (7), у якій використовується обмірюване значення несправного датчика. При несправності другого датчика, визначення його проводиться аналогічно визначенню першого несправного датчика. Таким чином, запропонована система дозволяє визначити не менш двох несправних датчиків і забезпечити при цьому видачу інформації про проекції координат на осі керування транспортних засобів. Застосування запропонованої системи дозволяє зменшити вагу й енергоспоживання за рахунок виключення двох датчиків і підвищити надійність через працездатність при несправностях двох будь - яких датчиків. 7 Комп’ютерна верстка М. Мацело 18796 8 Підписне Тираж 26 прим. Міністерство освіти інауки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of redundancy of gauges of three-dimensional motion of transportation means
Автори англійськоюBandura Ivan Mykolaiovych
Назва патенту російськоюСистема резервирования измерителей трехмерного движения транспортных средств
Автори російськоюБандура Иван Николаевич
МПК / Мітки
МПК: B64C 13/00
Мітки: система, руху, засобів, тримірного, вимірників, транспортних, резервування
Код посилання
<a href="https://ua.patents.su/4-18796-sistema-rezervuvannya-vimirnikiv-trimirnogo-rukhu-transportnikh-zasobiv.html" target="_blank" rel="follow" title="База патентів України">Система резервування вимірників тримірного руху транспортних засобів</a>
Спосіб визначення швидкостей руху транспортних засобів при зіткненні
Номер патенту: 54738
Опубліковано: 17.03.2003
Автори: Кисельов Володимир Борисович, Байков Валерій Павлович, Любарський Костянтин Анатолійович
МПК: G01N 19/00, B60J 9/00
Мітки: визначення, засобів, руху, транспортних, спосіб, зіткненні, швидкостей
Формула / Реферат:
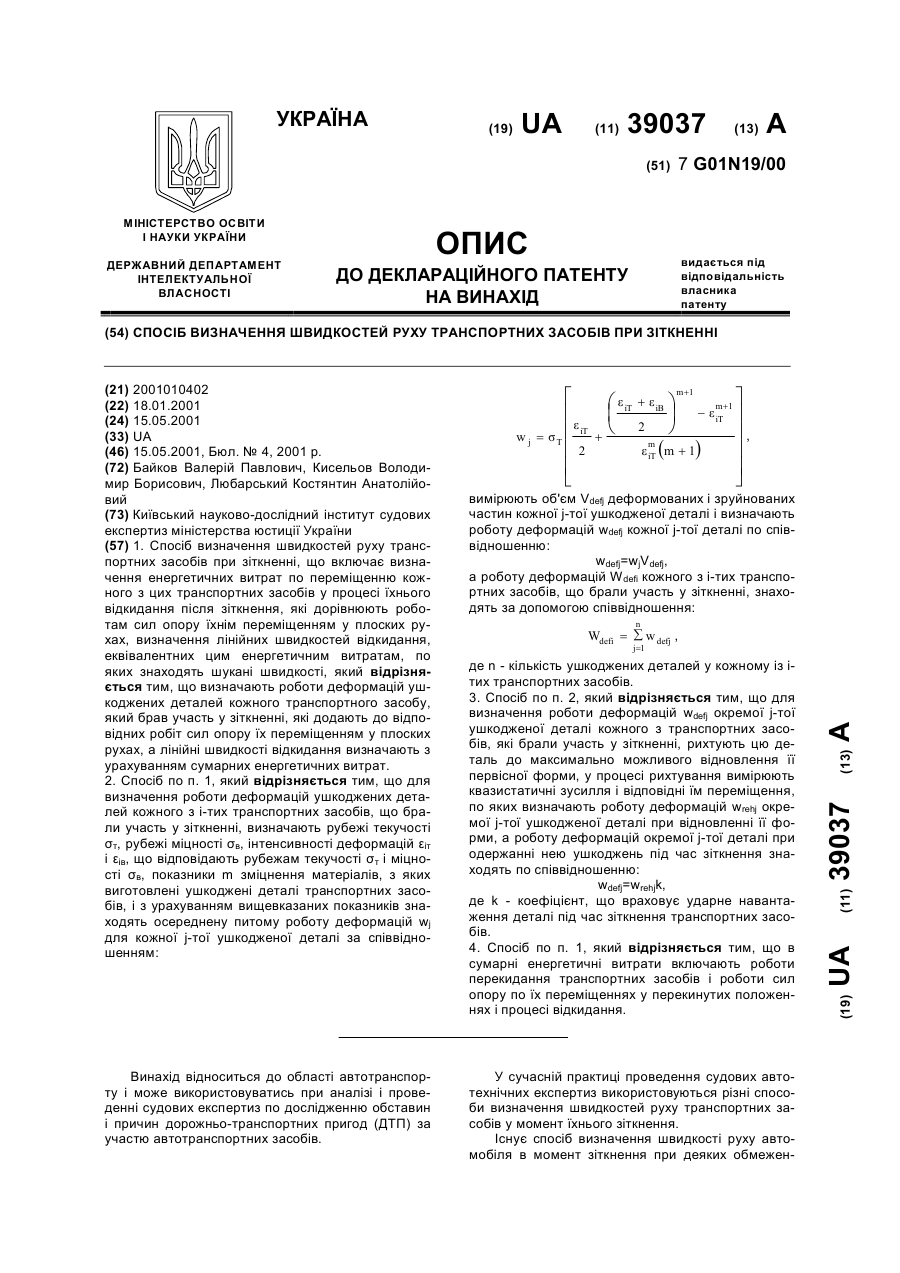
Спосіб визначення швидкостей руху транспортних засобів при зіткненні, що включає визначення сумарних енергетичних витрат, які складаються з робіт сил опору переміщенням транспортних засобів в процесі їх відкидання після зіткнення і робіт деформацій кожного і-того транспортного засобу в момент зіткнення, визначення величин початкових лінійних швидкостей відкидання, які еквівалентні цим енергетичним витратам,...
Мобільна диспетчерська система для транспортних засобів
Номер патенту: 44047
Опубліковано: 15.01.2002
Автори: Барладін Петро Олександрович, Барладін Олександр Володимирович
МПК: G09B 29/10, G08G 1/0969
Мітки: система, транспортних, диспетчерська, засобів, мобільна
Формула / Реферат:
1. Мобільна диспетчерська система для транспортних засобів, що містить модуль управління, дисплей, картографічний модуль, модуль визначення координат і модуль передачі радіосигналу, яка відрізняється тим, що містить перший блок, який включає модулі визначення координат і передачі радіосигналу, з'єднані між собою і обладнані модулем стану, з'єднаним з модулем передачі сигналу, і автономним джерелом живлення, з'єднаним з модулем стану, і другий...
Пристрій кондиціонування повітря для транспортних засобів
Номер патенту: 44514
Опубліковано: 15.02.2002
Автори: Бачок Олег Сергійович, Козак Олег Володимирович, Драпак Георгій Мефодіович
МПК: B60H 3/00
Мітки: транспортних, засобів, пристрій, повітря, кондиціонування
Формула / Реферат:
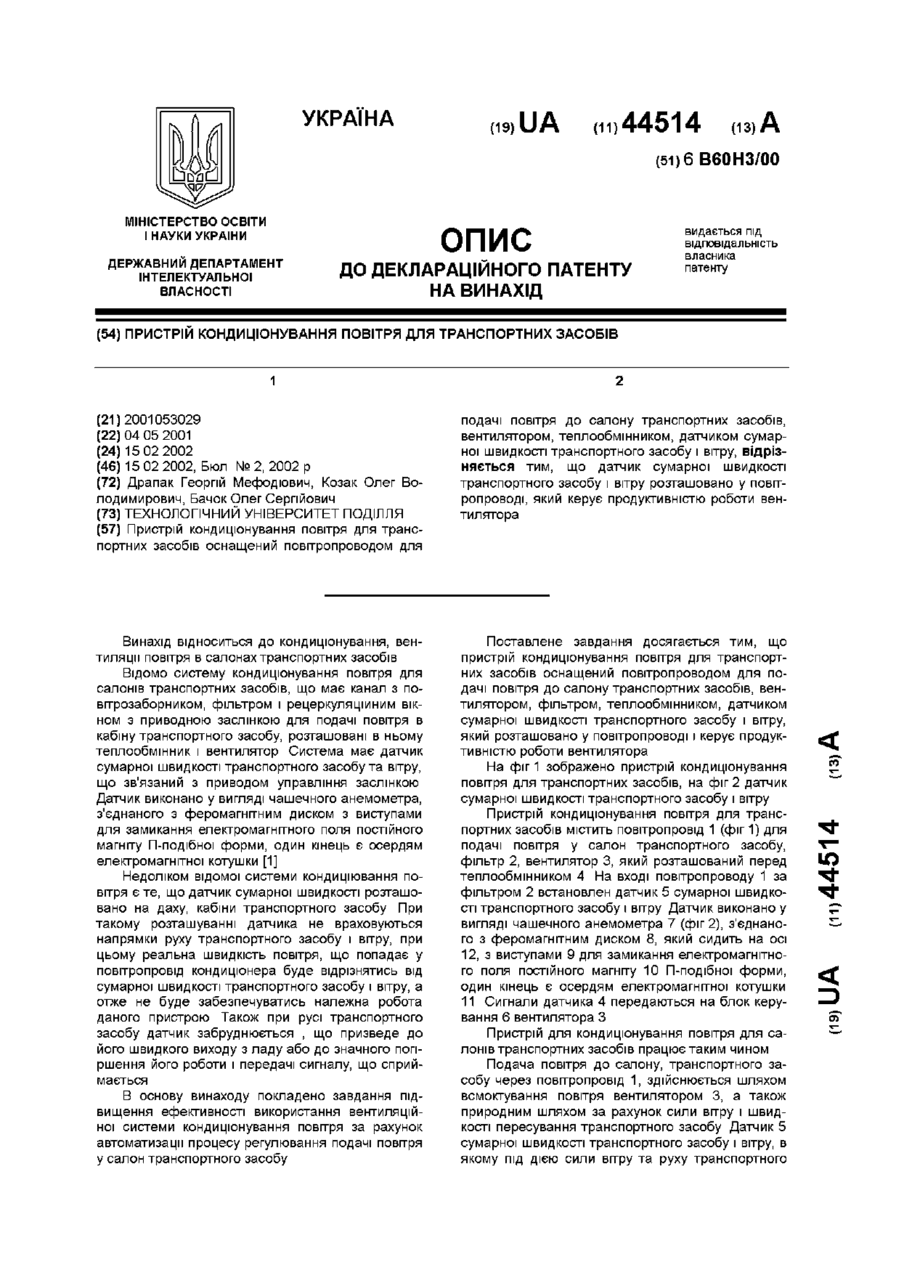
Пристрій кондиціонування повітря для транспортних засобів оснащений повітропроводом для подачі повітря до салону транспортних засобів, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру, відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру розташовано у повітропроводі, який керує продуктивністю роботи вентилятора.
Спосіб визначення швидкостей руху транспортних засобів при зіткненні
Номер патенту: 39037
Опубліковано: 15.05.2001
Автори: Любарський Костянтин Анатолійовий, Байков Валерій Павлович, Кисельов Володимир Борисович
МПК: G01M 17/007, G01N 19/00
Мітки: транспортних, швидкостей, зіткненні, спосіб, визначення, руху, засобів
Формула / Реферат:
(21) 2001010402(54) (57)Дата прийняття рішення01 березня 2001 р.1. Спосіб визначення швидкостей руху транспортних засобів при зіткненні, що включаєвизначення енергетичних витрат по переміщенню кожного з цих транспортних засобів у процесі їхнього відкидання після зіткнення, які дорівнюють роботам сил опору їхнім переміщенням у плоских рухах, визначення лінійних швидкостей відкидання, еквівалентних цим...
Система контролю маршрутів рухання наземних транспортних засобів
Номер патенту: 52943
Опубліковано: 15.01.2003
Автори: Демидов Олександр Григорович, Олексієнко Олег Володимирович, Вишневський Юрій Олександрович, Костусяк Віктор Семенович
МПК: G01C 21/34, G01C 7/00, G01C 21/26
Мітки: маршрутів, наземних, транспортних, засобів, рухання, система, контролю
Формула / Реферат:
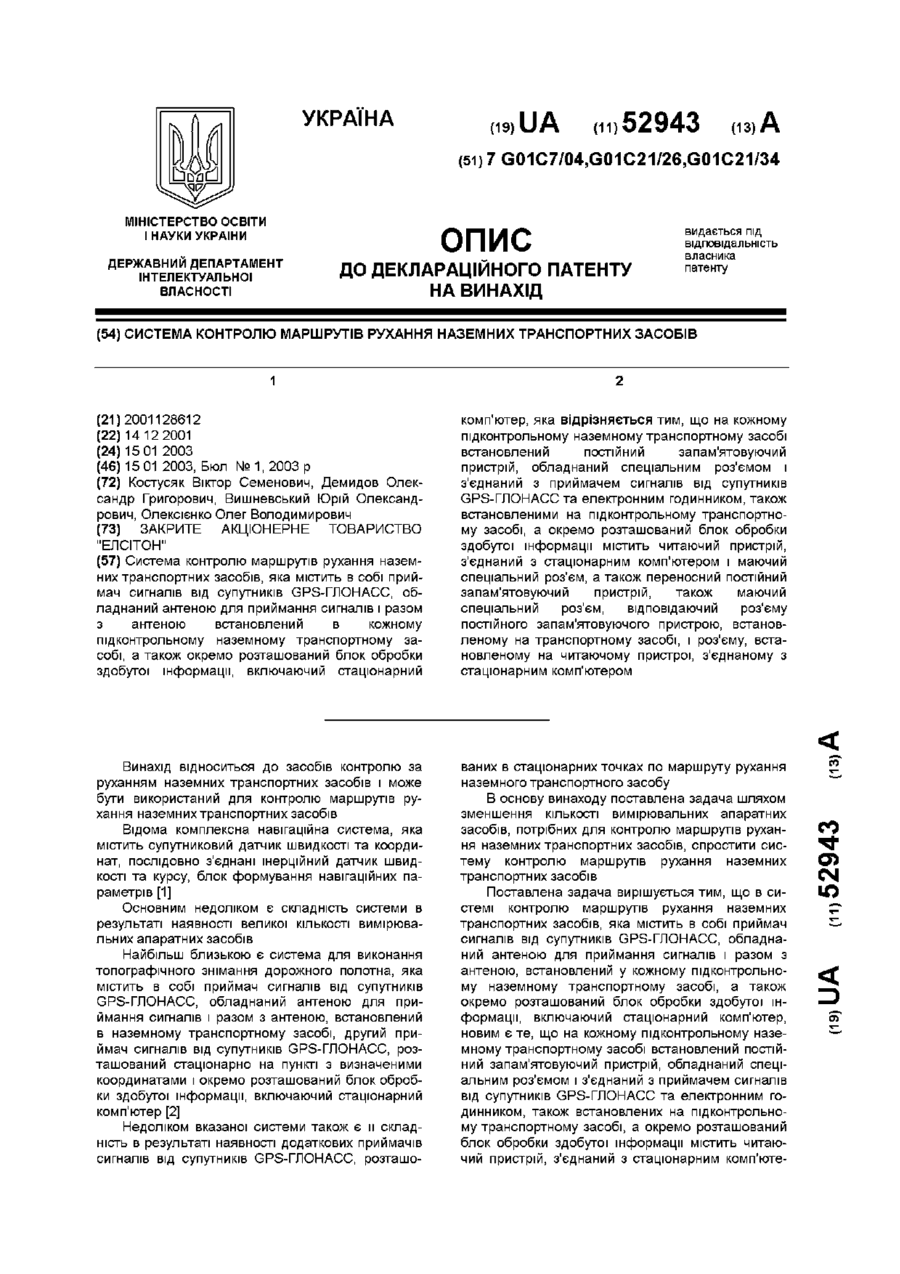
Система контролю маршрутів рухання наземних транспортних засобів, яка містить в собі приймач сигналів від супутників GPS-ГЛОНАСС, обладнаний антеною для приймання сигналів і разом з антеною встановлений в кожному підконтрольному наземному транспортному засобі, а також окремо розташований блок обробки здобутої інформації, включаючий стаціонарний комп'ютер, яка відрізняється тим, що на кожному підконтрольному наземному транспортному засобі...
Попередній патент: Пристрій для здійснення статичних випробувань ґрунтів
Наступний патент: Від`єднувальний перехідник
Випадковий патент: Спосіб захисту мозку при корекції аневризм висхідної аорти та дуги