Датчик

Формула / Реферат
Датчик, що містить постійний магніт, додатковий постійний магніт, розміщений з боку від основного постійного магніту та з'єднаний з ним немагнітними перемичками, пару градієнтометрів, розташованих на осі симетрії постійних магнітів з боку їхніх полюсів, при цьому вихідні обмотки градієнтометрів увімкнені за диференціальною схемою, який відрізняється тим, що додатково містить першу пару ферозондів, вихідні обмотки яких увімкнені за градієнтною схемою, та другу пару ферозондів, вихідні обмотки яких також увімкнені за градієнтною схемою, причому обидві пари ферозондів розташовані одна відносно іншої на відстані, що дорівнює половині довжини постійного магніту, а початки вихідних обмоток ферозондів, розташованих з одного боку постійного магніту, об'єднано.
Текст
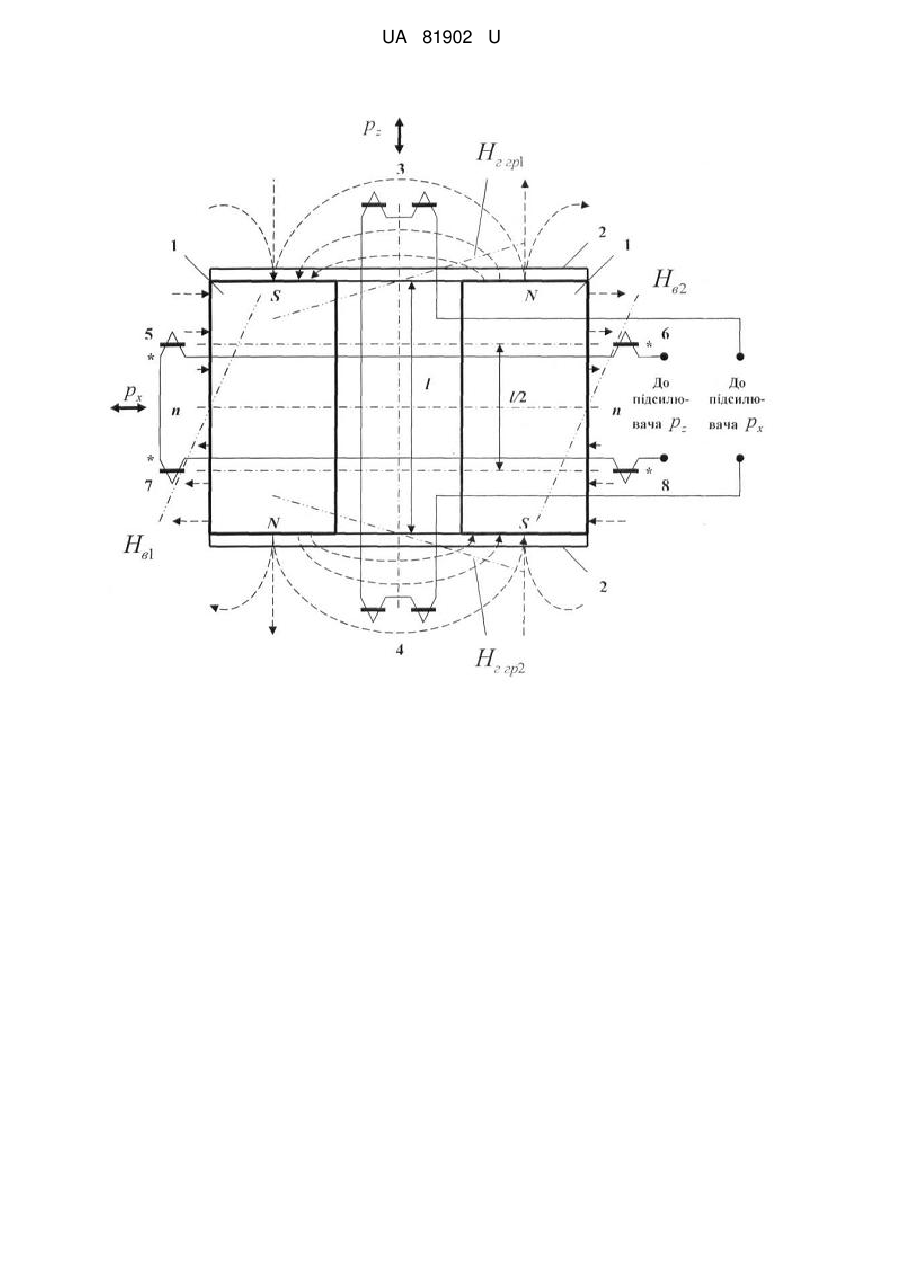
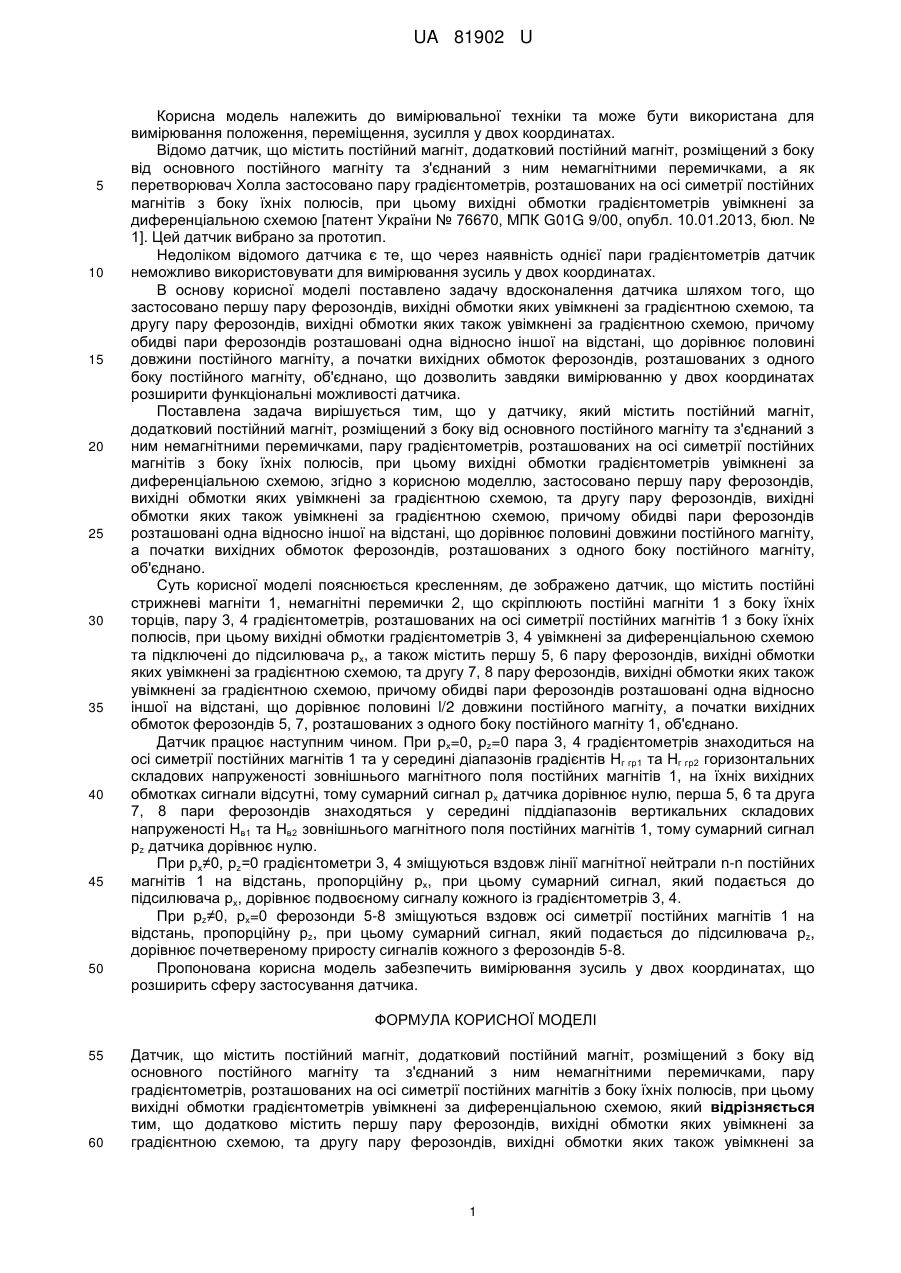
Реферат: UA 81902 U UA 81902 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання положення, переміщення, зусилля у двох координатах. Відомо датчик, що містить постійний магніт, додатковий постійний магніт, розміщений з боку від основного постійного магніту та з'єднаний з ним немагнітними перемичками, а як перетворювач Холла застосовано пару градієнтометрів, розташованих на осі симетрії постійних магнітів з боку їхніх полюсів, при цьому вихідні обмотки градієнтометрів увімкнені за диференціальною схемою [патент України № 76670, МПК G01G 9/00, опубл. 10.01.2013, бюл. № 1]. Цей датчик вибрано за прототип. Недоліком відомого датчика є те, що через наявність однієї пари градієнтометрів датчик неможливо використовувати для вимірювання зусиль у двох координатах. В основу корисної моделі поставлено задачу вдосконалення датчика шляхом того, що застосовано першу пару ферозондів, вихідні обмотки яких увімкнені за градієнтною схемою, та другу пару ферозондів, вихідні обмотки яких також увімкнені за градієнтною схемою, причому обидві пари ферозондів розташовані одна відносно іншої на відстані, що дорівнює половині довжини постійного магніту, а початки вихідних обмоток ферозондів, розташованих з одного боку постійного магніту, об'єднано, що дозволить завдяки вимірюванню у двох координатах розширити функціональні можливості датчика. Поставлена задача вирішується тим, що у датчику, який містить постійний магніт, додатковий постійний магніт, розміщений з боку від основного постійного магніту та з'єднаний з ним немагнітними перемичками, пару градієнтометрів, розташованих на осі симетрії постійних магнітів з боку їхніх полюсів, при цьому вихідні обмотки градієнтометрів увімкнені за диференціальною схемою, згідно з корисною моделлю, застосовано першу пару ферозондів, вихідні обмотки яких увімкнені за градієнтною схемою, та другу пару ферозондів, вихідні обмотки яких також увімкнені за градієнтною схемою, причому обидві пари ферозондів розташовані одна відносно іншої на відстані, що дорівнює половині довжини постійного магніту, а початки вихідних обмоток ферозондів, розташованих з одного боку постійного магніту, об'єднано. Суть корисної моделі пояснюється кресленням, де зображено датчик, що містить постійні стрижневі магніти 1, немагнітні перемички 2, що скріплюють постійні магніти 1 з боку їхніх торців, пару 3, 4 градієнтометрів, розташованих на осі симетрії постійних магнітів 1 з боку їхніх полюсів, при цьому вихідні обмотки градієнтометрів 3, 4 увімкнені за диференціальною схемою та підключені до підсилювача рх, а також містить першу 5, 6 пару ферозондів, вихідні обмотки яких увімкнені за градієнтною схемою, та другу 7, 8 пару ферозондів, вихідні обмотки яких також увімкнені за градієнтною схемою, причому обидві пари ферозондів розташовані одна відносно іншої на відстані, що дорівнює половині l/2 довжини постійного магніту, а початки вихідних обмоток ферозондів 5, 7, розташованих з одного боку постійного магніту 1, об'єднано. Датчик працює наступним чином. При рх=0, рz=0 пара 3, 4 градієнтометрів знаходиться на осі симетрії постійних магнітів 1 та у середині діапазонів градієнтів Нг гр1 та Нг гр2 горизонтальних складових напруженості зовнішнього магнітного поля постійних магнітів 1, на їхніх вихідних обмотках сигнали відсутні, тому сумарний сигнал рх датчика дорівнює нулю, перша 5, 6 та друга 7, 8 пари ферозондів знаходяться у середині піддіапазонів вертикальних складових напруженості Нв1 та Нв2 зовнішнього магнітного поля постійних магнітів 1, тому сумарний сигнал рz датчика дорівнює нулю. При рх≠0, рz=0 градієнтометри 3, 4 зміщуються вздовж лінії магнітної нейтрали n-n постійних магнітів 1 на відстань, пропорційну рх, при цьому сумарний сигнал, який подається до підсилювача рх, дорівнює подвоєному сигналу кожного із градієнтометрів 3, 4. При pz≠0, рх=0 ферозонди 5-8 зміщуються вздовж осі симетрії постійних магнітів 1 на відстань, пропорційну рz, при цьому сумарний сигнал, який подається до підсилювача рz, дорівнює почетвереному приросту сигналів кожного з ферозондів 5-8. Пропонована корисна модель забезпечить вимірювання зусиль у двох координатах, що розширить сферу застосування датчика. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 Датчик, що містить постійний магніт, додатковий постійний магніт, розміщений з боку від основного постійного магніту та з'єднаний з ним немагнітними перемичками, пару градієнтометрів, розташованих на осі симетрії постійних магнітів з боку їхніх полюсів, при цьому вихідні обмотки градієнтометрів увімкнені за диференціальною схемою, який відрізняється тим, що додатково містить першу пару ферозондів, вихідні обмотки яких увімкнені за градієнтною схемою, та другу пару ферозондів, вихідні обмотки яких також увімкнені за 1 UA 81902 U градієнтною схемою, причому обидві пари ферозондів розташовані одна відносно іншої на відстані, що дорівнює половині довжини постійного магніту, а початки вихідних обмоток ферозондів, розташованих з одного боку постійного магніту, об'єднано. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюSensor
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюДатчик
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: датчик
Код посилання
<a href="https://ua.patents.su/4-81902-datchik.html" target="_blank" rel="follow" title="База патентів України">Датчик</a>
Датчик
Номер патенту: 76670
Опубліковано: 10.01.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
Датчик, що містить постійний магніт, який відрізняється тим, що застосовано додатковий постійний магніт, розміщений з боку від основного постійного магніту та з'єднаний з ним немагнітними перемичками, а як перетворювач Холла застосовано пару градієнтометрів, розташованих на осі симетрії постійних магнітів з боку їхніх полюсів, при цьому вихідні обмотки градієнтометрів увімкнені за диференціальною схемою.
Датчик
Номер патенту: 76669
Опубліковано: 10.01.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
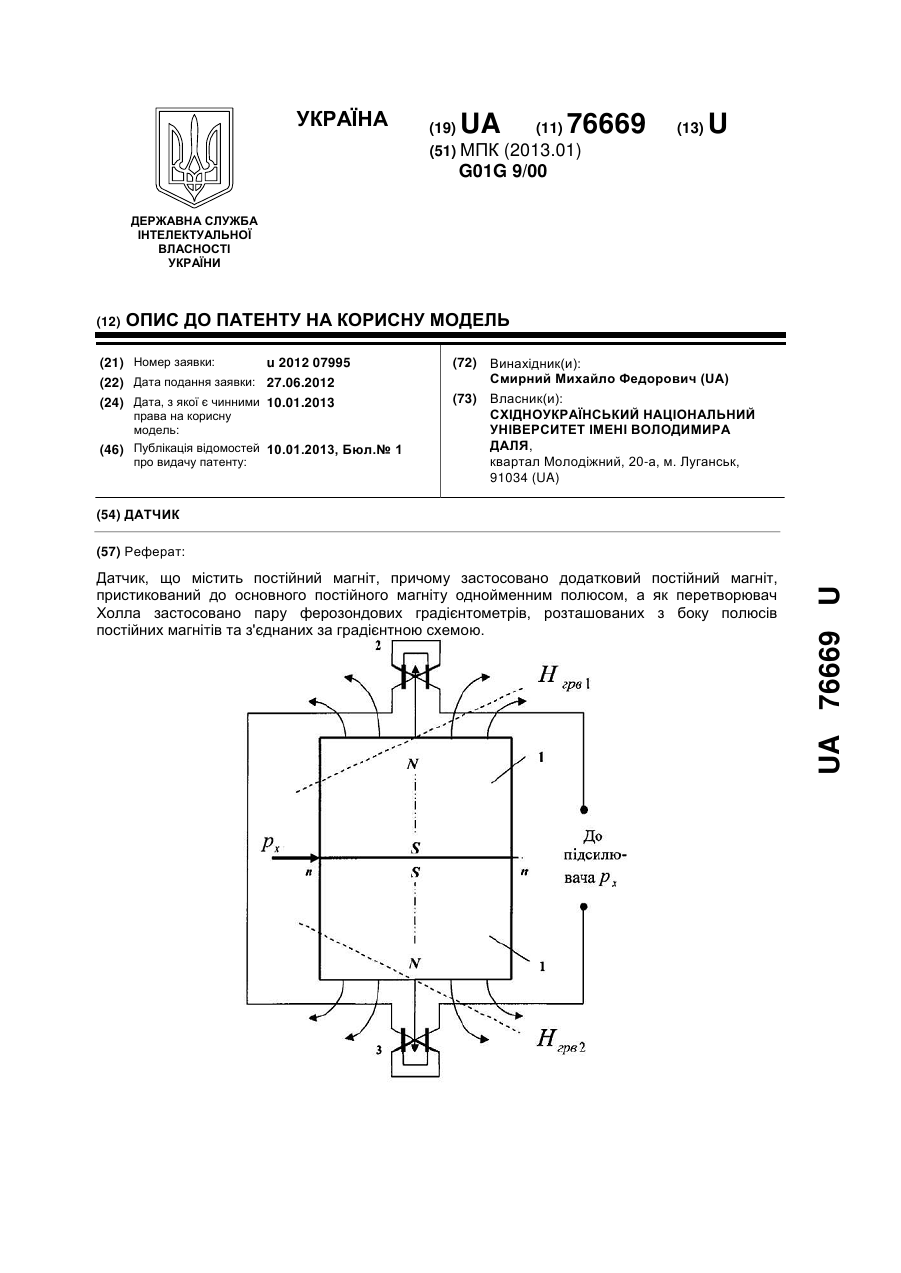
Датчик, що містить постійний магніт, який відрізняється тим, що застосовано додатковий постійний магніт, пристикований до основного постійного магніту однойменним полюсом, а як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійних магнітів та з'єднаних за градієнтною схемою.
Датчик
Номер патенту: 75429
Опубліковано: 26.11.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
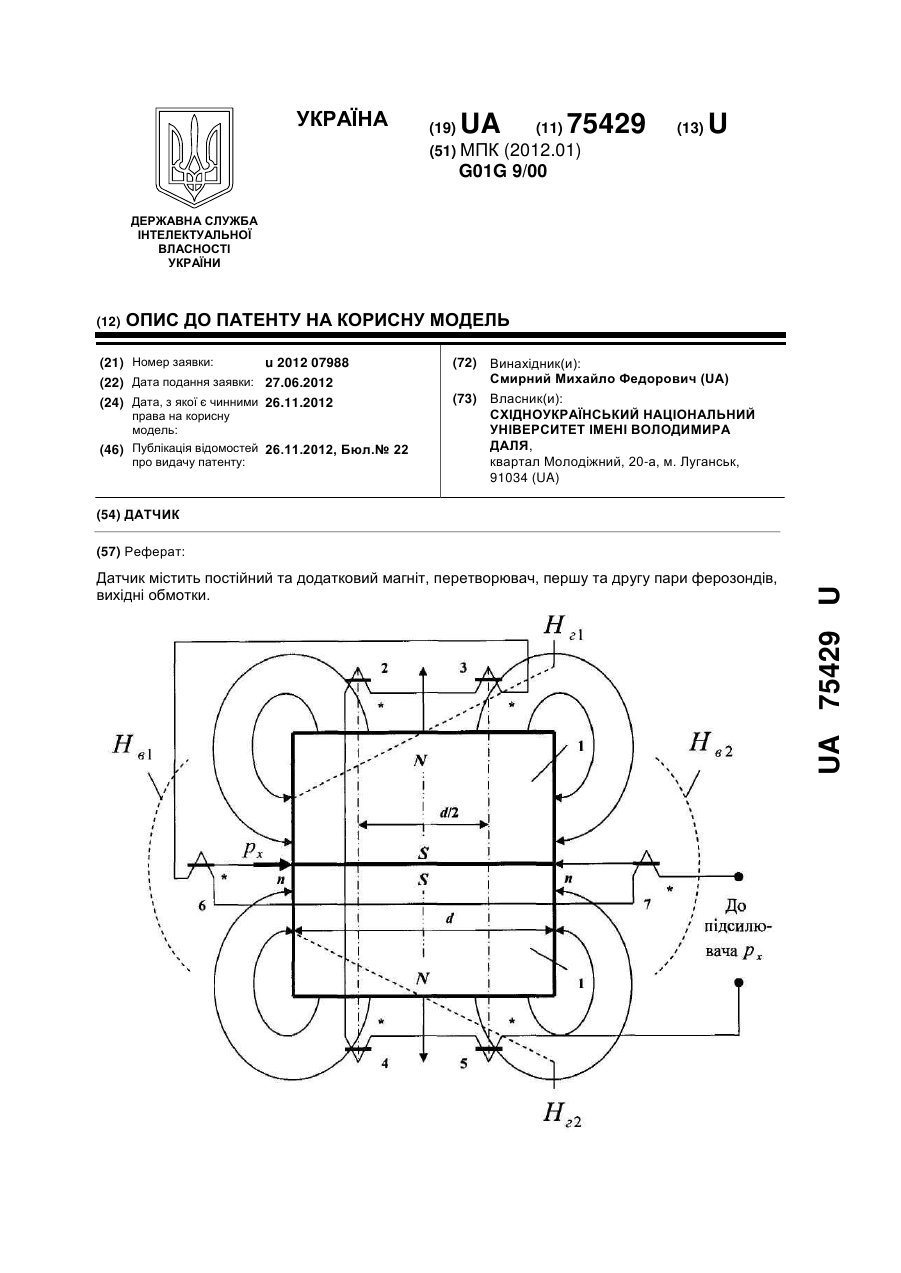
Датчик, що містить постійний магніт, який відрізняється тим, що застосовано додатковий постійний магніт, притиснений до основного постійного магніту однойменним полюсом, а як перетворювач Холла застосовано першу та другу пари ферозондів, розташованих з боку торців постійних магнітів, вихідні обмотки яких попарно увімкнені за диференціальною схемою, причому ферозонди кожної із зазначених пар зміщені один відносно іншого на відстань, що...
Датчик
Номер патенту: 70986
Опубліковано: 25.06.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
Датчик, що містить постійний магніт, який відрізняється тим, що застосовано додатковий постійний магніт, розміщений з боку від основного постійного магніту та з'єднаний з ним немагнітними перемичками, а як перетворювач Холла застосовано пару ферозондів, розташованих між постійними магнітами один від одного на відстані, що дорівнює половині довжини постійного магніту, при цьому вихідні обмотки ферозондів увімкнені за диференціальною...
Датчик переміщень
Номер патенту: 73861
Опубліковано: 10.10.2012
Автор: Смірний Михайло Федорович
МПК: G01D 9/00
Мітки: датчик, переміщень
Формула / Реферат:
Датчик переміщень, що містить два пристиковані один до одного С-подібні постійні магніти, три ферозонди, розташовані в міжполюсному зазорі С-подібних постійних магнітів, перший з яких розміщений в центрі міжполюсного зазору, другий та третій ферозонди - симетрично від нього на відстані, що дорівнює ширині полюса постійного магніту, причому вихідні обмотки ферозондів з'єднані послідовно зустрічно, який відрізняється тим, що додатково містить...
Попередній патент: Диференціальний перетворювач переміщення
Наступний патент: Пристрій для зчитування інформації з профільного металевого носія
Випадковий патент: Захисна закупорка для пляшок з горілчаними та іншими напоями