Датчик
Формула / Реферат
Датчик, що містить два постійні магніти, пристиковані один до одного однойменними полюсами, пару ферозондових градієнтометрів, розташованих з боку полюсів постійних магнітів та з'єднаних за диференціальною схемою, який відрізняється тим, що застосовано додаткову пару ферозондових градієнтометрів, розташованих з двох боків постійних магнітів на лінії їхньої магнітної нейтралі та з'єднаних за градієнтною схемою.
Текст
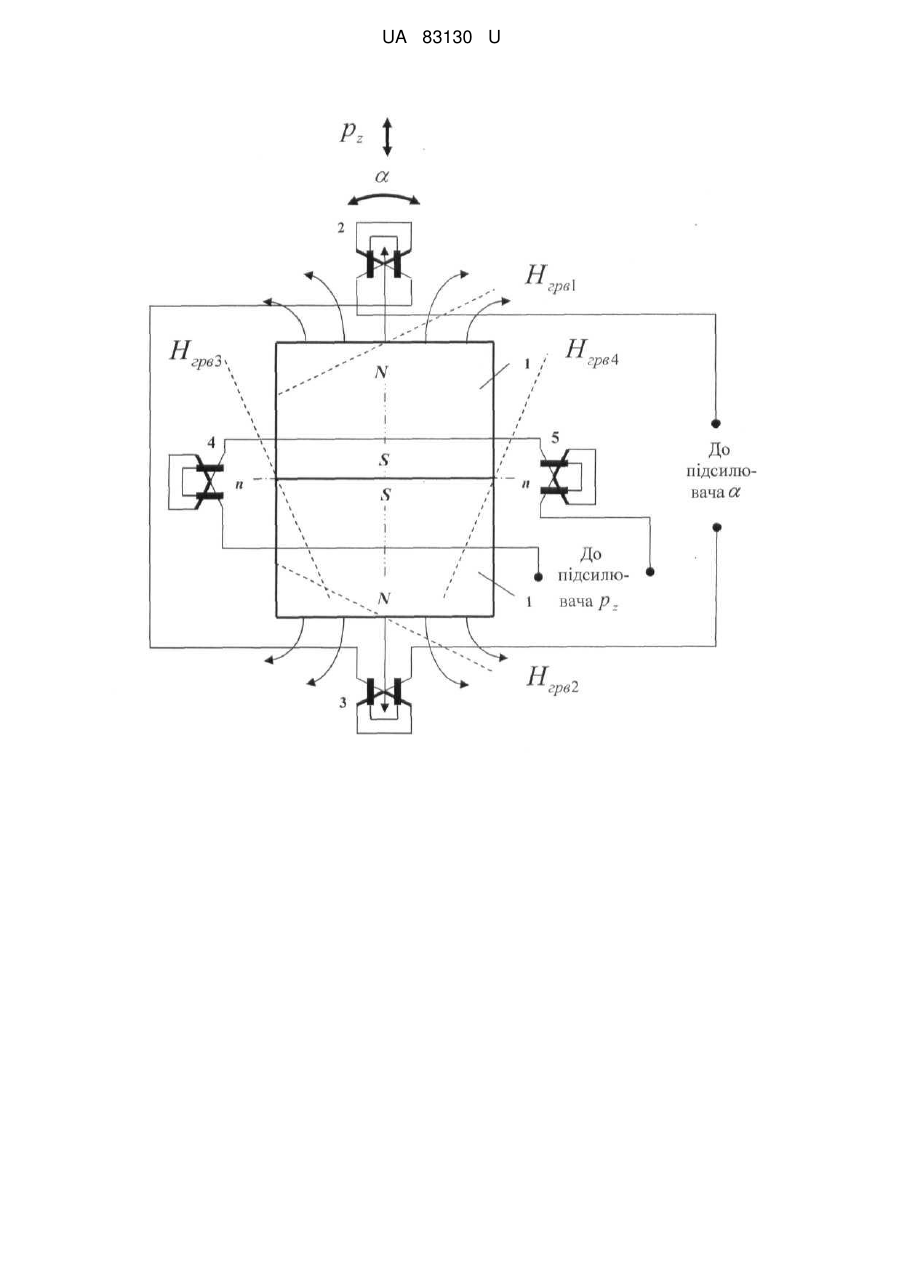
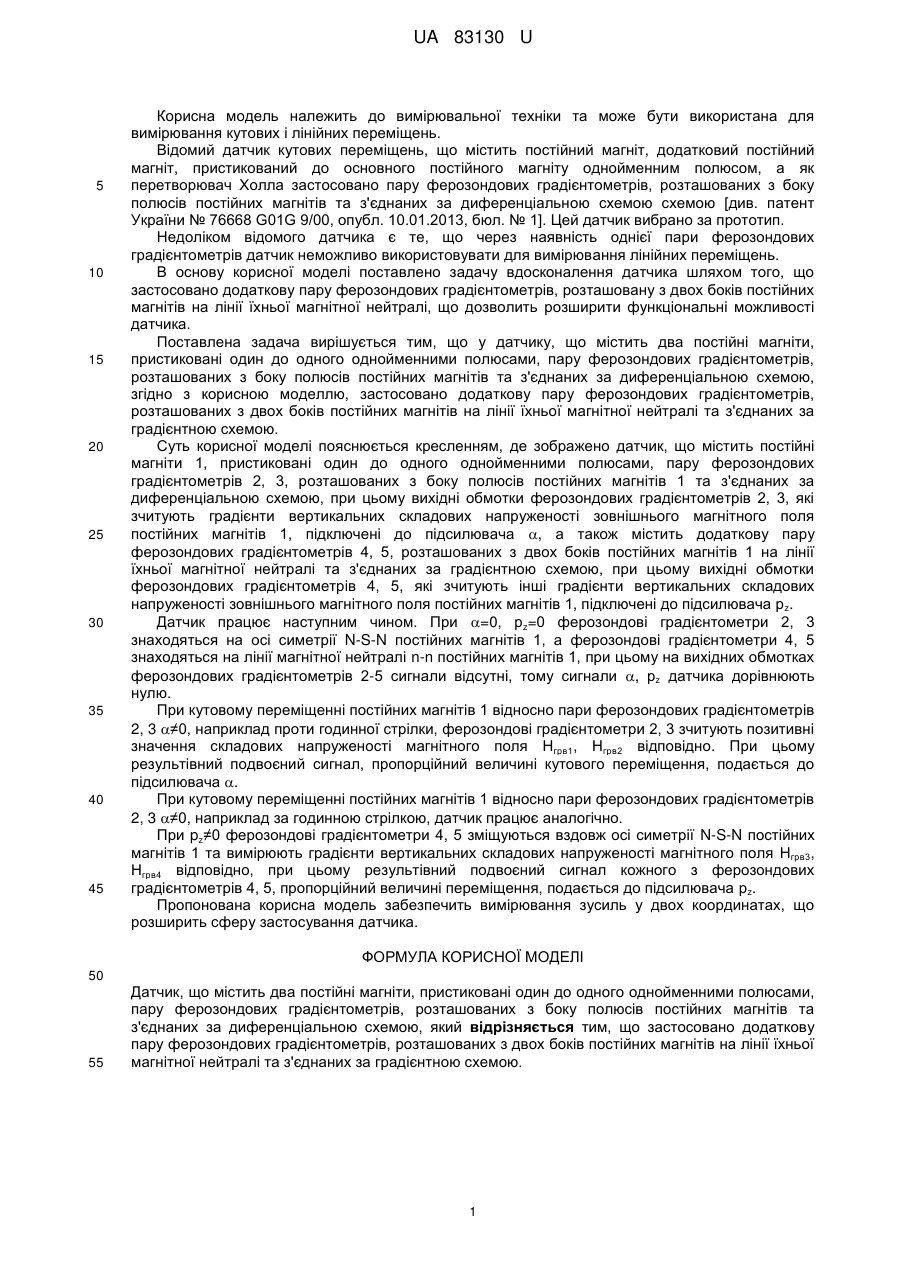
Реферат: UA 83130 U UA 83130 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання кутових і лінійних переміщень. Відомий датчик кутових переміщень, що містить постійний магніт, додатковий постійний магніт, пристикований до основного постійного магніту однойменним полюсом, а як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійних магнітів та з'єднаних за диференціальною схемою схемою [див. патент України № 76668 G01G 9/00, опубл. 10.01.2013, бюл. № 1]. Цей датчик вибрано за прототип. Недоліком відомого датчика є те, що через наявність однієї пари ферозондових градієнтометрів датчик неможливо використовувати для вимірювання лінійних переміщень. В основу корисної моделі поставлено задачу вдосконалення датчика шляхом того, що застосовано додаткову пару ферозондових градієнтометрів, розташовану з двох боків постійних магнітів на лінії їхньої магнітної нейтралі, що дозволить розширити функціональні можливості датчика. Поставлена задача вирішується тим, що у датчику, що містить два постійні магніти, пристиковані один до одного однойменними полюсами, пару ферозондових градієнтометрів, розташованих з боку полюсів постійних магнітів та з'єднаних за диференціальною схемою, згідно з корисною моделлю, застосовано додаткову пару ферозондових градієнтометрів, розташованих з двох боків постійних магнітів на лінії їхньої магнітної нейтралі та з'єднаних за градієнтною схемою. Суть корисної моделі пояснюється кресленням, де зображено датчик, що містить постійні магніти 1, пристиковані один до одного однойменними полюсами, пару ферозондових градієнтометрів 2, 3, розташованих з боку полюсів постійних магнітів 1 та з'єднаних за диференціальною схемою, при цьому вихідні обмотки ферозондових градієнтометрів 2, 3, які зчитують градієнти вертикальних складових напруженості зовнішнього магнітного поля постійних магнітів 1, підключені до підсилювача , а також містить додаткову пару ферозондових градієнтометрів 4, 5, розташованих з двох боків постійних магнітів 1 на лінії їхньої магнітної нейтралі та з'єднаних за градієнтною схемою, при цьому вихідні обмотки ферозондових градієнтометрів 4, 5, які зчитують інші градієнти вертикальних складових напруженості зовнішнього магнітного поля постійних магнітів 1, підключені до підсилювача p z. Датчик працює наступним чином. При =0, рz=0 ферозондові градієнтометри 2, 3 знаходяться на осі симетрії N-S-N постійних магнітів 1, а ферозондові градієнтометри 4, 5 знаходяться на лінії магнітної нейтралі n-n постійних магнітів 1, при цьому на вихідних обмотках ферозондових градієнтометрів 2-5 сигнали відсутні, тому сигнали , рz датчика дорівнюють нулю. При кутовому переміщенні постійних магнітів 1 відносно пари ферозондових градієнтометрів 2, 3 ≠0, наприклад проти годинної стрілки, ферозондові градієнтометри 2, 3 зчитують позитивні значення складових напруженості магнітного поля Нгрв1, Нгрв2 відповідно. При цьому результівний подвоєний сигнал, пропорційний величині кутового переміщення, подається до підсилювача . При кутовому переміщенні постійних магнітів 1 відносно пари ферозондових градієнтометрів 2, 3 ≠0, наприклад за годинною стрілкою, датчик працює аналогічно. При pz≠0 ферозондові градієнтометри 4, 5 зміщуються вздовж осі симетрії N-S-N постійних магнітів 1 та вимірюють градієнти вертикальних складових напруженості магнітного поля Нгрв3, Нгрв4 відповідно, при цьому результівний подвоєний сигнал кожного з ферозондових градієнтометрів 4, 5, пропорційний величині переміщення, подається до підсилювача рz. Пропонована корисна модель забезпечить вимірювання зусиль у двох координатах, що розширить сферу застосування датчика. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Датчик, що містить два постійні магніти, пристиковані один до одного однойменними полюсами, пару ферозондових градієнтометрів, розташованих з боку полюсів постійних магнітів та з'єднаних за диференціальною схемою, який відрізняється тим, що застосовано додаткову пару ферозондових градієнтометрів, розташованих з двох боків постійних магнітів на лінії їхньої магнітної нейтралі та з'єднаних за градієнтною схемою. 1 UA 83130 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюSensor
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюДатчик
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: датчик
Код посилання
<a href="https://ua.patents.su/4-83130-datchik.html" target="_blank" rel="follow" title="База патентів України">Датчик</a>
Датчик
Номер патенту: 76669
Опубліковано: 10.01.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
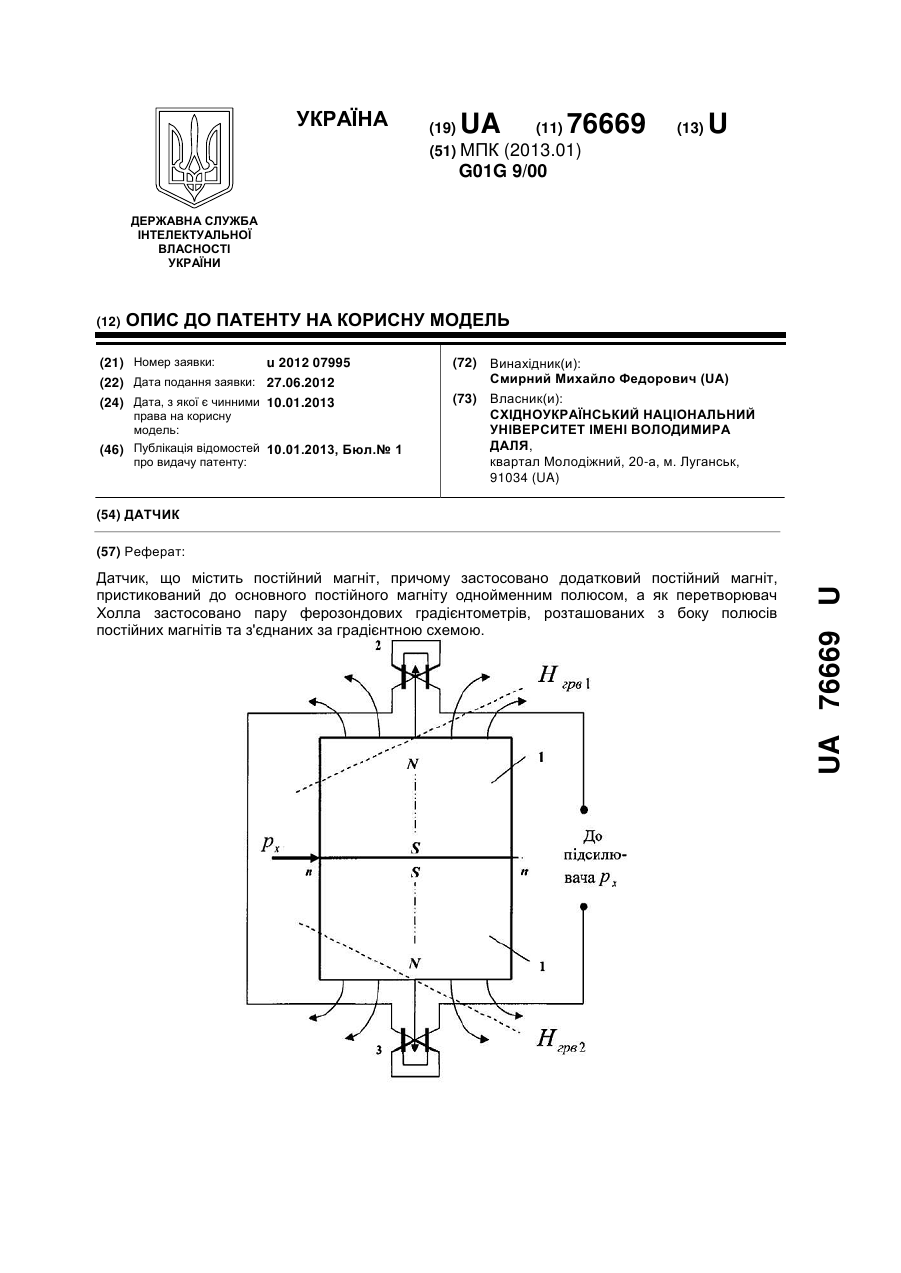
Датчик, що містить постійний магніт, який відрізняється тим, що застосовано додатковий постійний магніт, пристикований до основного постійного магніту однойменним полюсом, а як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійних магнітів та з'єднаних за градієнтною схемою.
Датчик
Номер патенту: 76668
Опубліковано: 10.01.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
Датчик, що містить постійний магніт, який відрізняється тим, що застосовано додатковий постійний магніт, пристикований до основного постійного магніту однойменним полюсом, а як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійних магнітів та з'єднаних за диференціальною схемою.
Датчик вібрацій
Номер патенту: 81185
Опубліковано: 25.06.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Формула / Реферат:
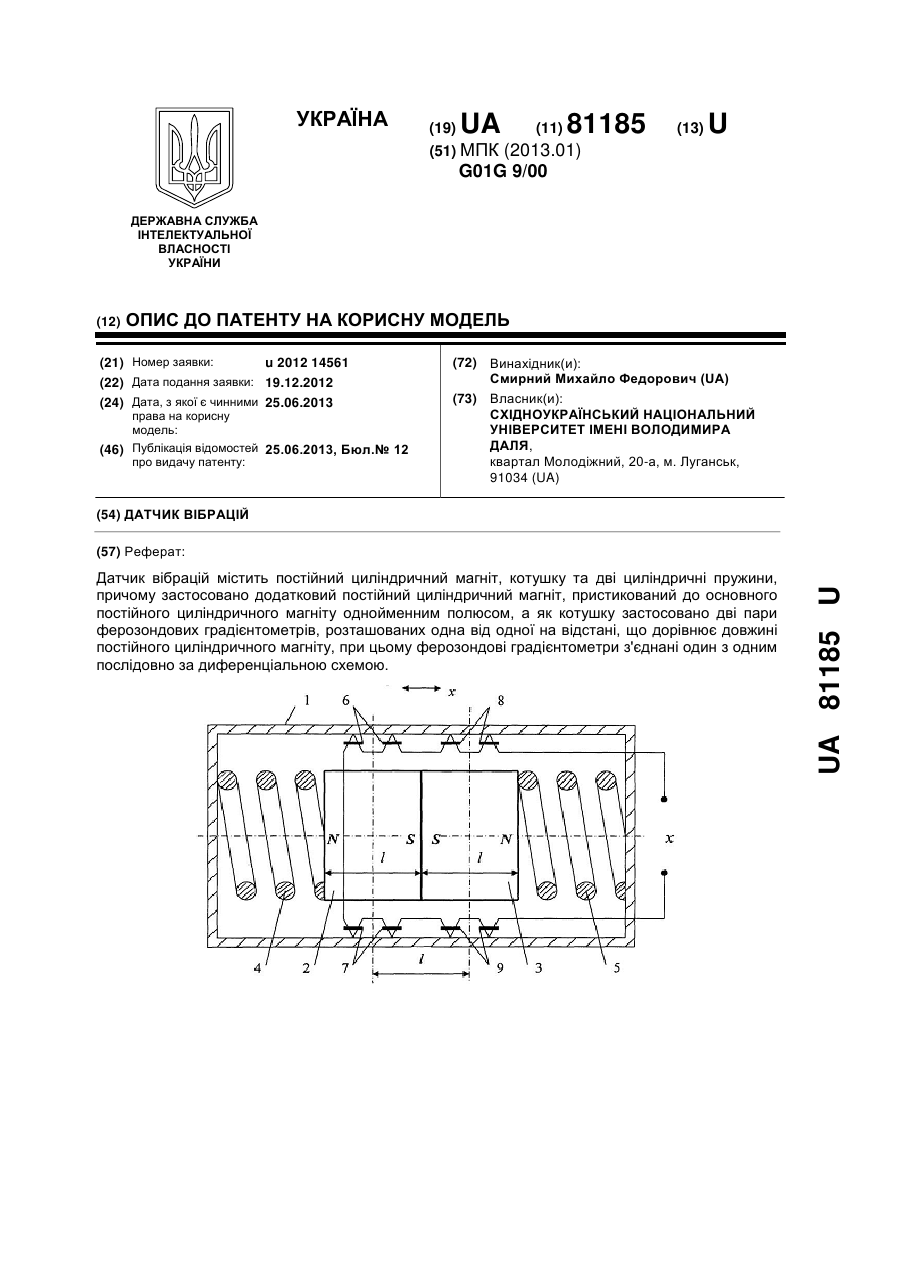
Датчик вібрацій, що містить постійний циліндричний магніт, котушку та дві циліндричні пружини, який відрізняється тим, що застосовано додатковий постійний циліндричний магніт, пристикований до основного постійного циліндричного магніту однойменним полюсом, а як котушку застосовано дві пари ферозондових градієнтометрів, розташованих одна від одної на відстані, що дорівнює довжині постійного циліндричного магніту, при цьому ферозондові...
Датчик
Номер патенту: 74386
Опубліковано: 25.10.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
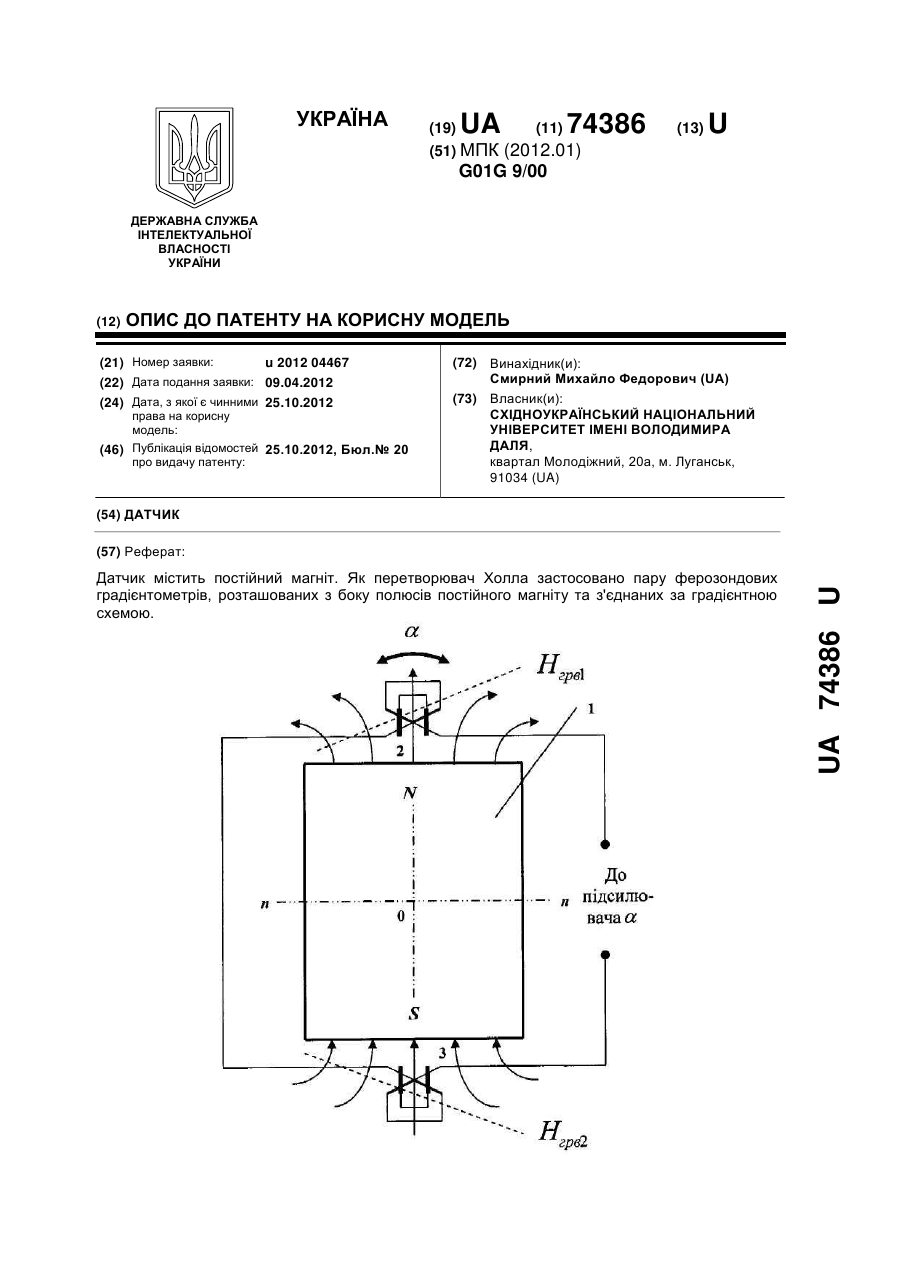
Датчик, що містить постійний магніт, який відрізняється тим, що як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійного магніту та з'єднаних за градієнтною схемою.
Датчик
Номер патенту: 76670
Опубліковано: 10.01.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
Датчик, що містить постійний магніт, який відрізняється тим, що застосовано додатковий постійний магніт, розміщений з боку від основного постійного магніту та з'єднаний з ним немагнітними перемичками, а як перетворювач Холла застосовано пару градієнтометрів, розташованих на осі симетрії постійних магнітів з боку їхніх полюсів, при цьому вихідні обмотки градієнтометрів увімкнені за диференціальною схемою.
Попередній патент: Датчик
Наступний патент: Датчик
Випадковий патент: Спосіб отримання дифосфатів перехідних металів мр2 о7(де m вибрано з ряду mo,w,nb,ta,re) як носіїв платинових та/або паладієвих каталізаторів окиснення водню