Спосіб передстартового контролю функціонування слідкувального електричного рульового приводу
Номер патенту: 87014
Опубліковано: 10.06.2009
Автори: Кузьмін В'ячеслав Павлович, Смішко Григорій Павлович, Коваленко Олександр Володимирович, Качаєв Микола Аркадійович, Бондарчук Сергій Васильович, Коростельов Олег Петрович
Формула / Реферат
1. Спосіб передстартового контролю функціонування слідкувального електричного рульового приводу, що включає подачу електроживлення на слідкувальний електричний рульовий привід, формування керувального сигналу шляхом складання на вході підсилювача слідкувального електричного рульового приводу керувального сигналу і сигналу від датчика кутового положення руля, реєстрацію струму в обмотці електродвигуна і прийняття рішення про придатність слідкувального електричного рульового приводу до експлуатації на підставі результатів вимірювань, який відрізняється тим, що у систему додатково вводять електронний ключ і компаратор з симетричною гістерезисною петлею перемикання, задають кутове положення аретування рулів слідкувального електричного приводу, при якому у слідкувальному електричному рульовому приводі виникає обертальний момент, що відповідає обертальному моменту на рулях слідкувального електричного рульового приводу у польоті, формують автоколивальний режим зааретованого слідкувального електричного рульового приводу, а прийняття рішення про придатність слідкувального електричного рульового приводу здійснюють в результаті порівняння частоти перемикання компаратора, що відповідає частоті автоколивань струму в обмотці електродвигуна, з наперед заданою частотою.
2. Спосіб за п. 1, який відрізняється тим, що формування автоколивального режиму зааретованого слідкувального електричного рульового приводу здійснюють шляхом перемикання компаратора по досягненні значення струму в обмотці електродвигуна порогового значення, замикання електронного ключа, подачі на суматор керувального сигналу, що за рівнем у два рази перевищує рівень сигналу датчика кутового положення руля в зааретованому стані, і протилежного йому за знаком, створення реверсування обмотки електродвигуна і наростання у ній значення струму до порогового значення з подальшим перемиканням компаратора у початковий стан і розмиканням електронного ключа.
Текст
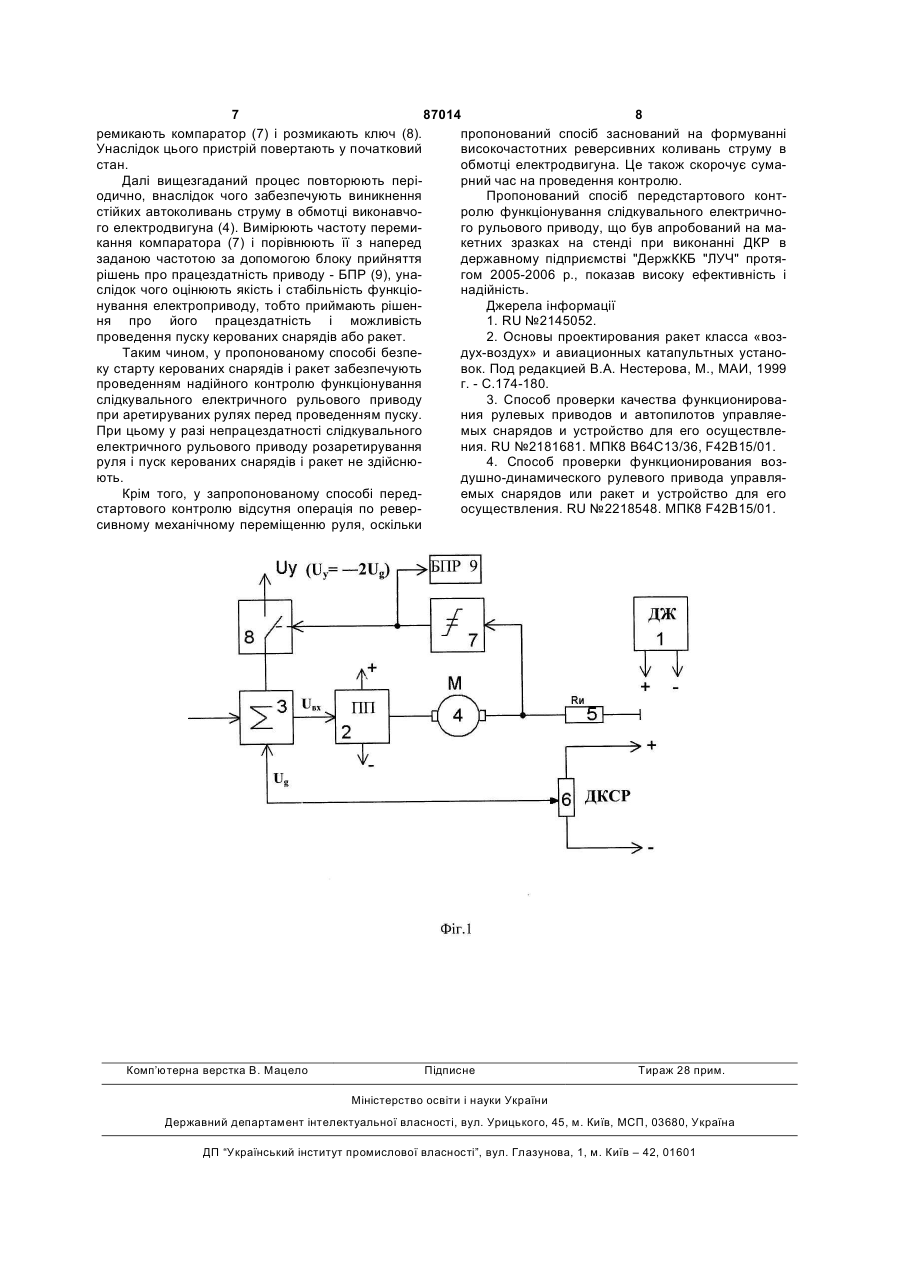
1. Спосіб передстартового контролю функціонування слідкувального електричного рульового приводу, що включає подачу електроживлення на слідкувальний електричний рульовий привід, формування керувального сигналу шляхом складання на вході підсилювача слідкувального електричного рульового приводу керувального сигналу і сигналу від датчика кутового положення руля, реєстрацію струму в обмотці електродвигуна і прийняття рішення про придатність слідкувального електричного рульового приводу до експлуатації на підставі результатів вимірювань, який відріз C2 2 87014 1 3 87014 4 доліком способу [2] є неможливість перевірки руприпустимість по температурі для закладених у льового приводу в зааретируваному стані при привод конструкційних матеріалів, здійснюють здійсненні передстартового контролю, а також зовнішній огляд приводу, проводять контрольне складність його технічної реалізації. розбирання приводу на вузли і деталі і та оцінюЯк аналог вибраний спосіб перевірки якості ють їх міцність, стійкість і працездатність. функціонування рульових приводів і автопілотів Недоліком способу контролю прототипу [4] є керованих снарядів, заснований на вимірюванні неможливість його використання при передстарчасу еквівалентного запізнювання рульового притовому контролі керованих снарядів або ракет. воду при відпрацюванні імпульсного сигналу керуВ основу винаходу поставлена задача по вання, відповідного максимальному куту повороту створенню умов для здійснення високопродуктивруля в один або і інший бік [3]. ної передстартової перевірки слідкувальних елекНедоліком способу аналога є те, що перевірка тричних рульових приводів керованих снарядів і моментних характеристик рульового приводу виракет з нерухомим (аретируваним) рулем, що примагає додаткового створіння шарнірних моментів веде до забезпечення безпеки старту керованих на рулі, що вельми небажано при проведенні перакет і снарядів і до скорочення тривалості здійсредстартового контролю. Спосіб аналога також не нення передстартового контролю функціонування може бути використаний при передстартовому слідкувального електричного рульового приводу. контролі в умовах нерухомих (аретируваних) рулів. Вказана задача досягається тим, що у способі Як найближчий аналог (прототип) прийнятий передстартового контролю функціонування слідспосіб перевірки функціонування (контролю) повікувального рульового приводу, що включає подачу тряно-динамічного рульового приводу [4]. Спосіб електроживлення на слідкувальний електричний прототипу заснований на реєстрації і контролі рорульовий привід, формування керувального сигботи приводу з імітатором шарнірного навантаналу шляхом складання на вході підсилювача ження на рулі (тобто при навантаженні руля шарслідкувального електричного рульового приводу нірним моментом) на стисненому повітрі при керувального сигналу і сигналу від датчика кутововідпрацюванні заданих сигналів керування за дого положення руля, реєстрацію струму в обмотці помогою подачі управляючих сигналів і живлення електродвигуна і прийняття рішення про придатна рульовий привід і подальшій реєстрації вининість слідкувального електричного рульового прикаючого струму в обмотці електродвигуна. Перевіводу до експлуатації на підставі результатів вимірку проводять в умовах подібності температурної і рювань, новим є те, що у систему додатково силової дії на елементи конструкції приводу стисвводять електронний ключ і компаратор з симетненого повітря з температурою і тиском, відповідричною гістерезисною петлею перемикання, заданим температурі гальмування і надмірному тиску ють кутове положення аретирування рулів слідкупотоку повітря на вході повітрезабірника при вального електричного приводу, при якому у польоті. Привод з розкритим рулем і повітрезабірслідкувальному електричному рульовому приводі ником із заздалегідь встановленими в ньому датвиникає обертаючий момент, що відповідає оберчиками для визначення температури і тиску повіттаючому моменту на рулях слідкувального електря на його вході, у його робочих порожнинах і ричного рульового приводу у польоті, формують температури стінок порожнин, встановлюють і заавтоколивальний режим зааретируваного слідкукріплюють на стенді навантаження, навантажують вального електричного рульового приводу, а прируль шарнірним навантаженням, що відповідає йняття рішення про придатність слідкувального навантаженню на рулі від повітряного потоку. Піселектричного рульового приводу здійснюють в ля попереднього продування пневмосистеми живрезультаті порівняння частоти перемикання комлення приводу стисненим повітрям проводять конпаратора, що відповідає частоті автоколивань трольну перевірку функціонування приводу при струму в обмотці електродвигуна, з наперед задавідпрацюванні заданих сигналів керування (реєстною частотою. рації струму в обмотці електродвигуна) на холодФормування автоколивального режиму заареному повітрі з температурою джерела пневможивтируваного слідкувального електричного рульоволення і тиском, відповідним надмірному тиску го приводу здійснюють шляхом перемикання компотоку повітря на вході повітрезабірника при паратора по досягненню значення струму в польоті снаряда або ракети, з визначенням втрат обмотці електродвигуна порогового значення, запо тиску пневмосистеми за різницею задаваємого і микання електронного ключа, подачі на суматор вхідного тисків та параметрів приводу. Потім покерувального сигналу, що по рівню у два рази педають на вхід приводу стрибком заздалегідь нагріревищує рівень сигналу датчика кутового полоте повітря з температурою і тиском, що відповідаження руля в зааретируваному стані, і протилежють температурі гальмування і надмірному тиску ному йому за знаком, створення з використанням потоку повітря на вході повітрезабірника при підсилювача реверсування обмотки електродвигупольоті, з одночасною подачею на привод сигналів на і наростання у ній значення струму до порогокерування. Проводять реєстрацію роботи приводу вого значення з подальшим перемиканням компаза заданою програмою, визначають температуру і ратора у початковий стан і розмиканням тиск повітря на вході рульового приводу і порівелектронного ключа. нюють їх на відповідність задаваємим, визначають Перераховані ознаки способу складають сутдинамічні параметри і параметри точності приводу ність винаходу. на відповідність, що вимагається. За отриманими Наявність причинно-наслідного зв'язку між сузначеннями температури повітря в порожнинах купністю істотних ознак винаходу і технічним реприводу і температури стінок порожнин оцінюють зультатом, що досягається, полягає в наступному. 5 87014 6 У сучасних керованих ракетах і снарядах шизаданому режимі, оскільки не досягалося наперед роке застосування знайшли слідкувальні електризадане значення обертального моменту, а також чні рульові приводи внаслідок їх високих динамічвідповідний йому рівень порогового струму в обних характеристик і простоти обслуговування при мотці електродвигуна. експлуатації. Цьому сприяло широке упровадженА при подачі керувального сигналу, що по рівня в системи керування ракет і снарядів об'єктів ню більше, ніж у два рази перевищував рівень мікропроцесорної техніки, а також поява електросигналу датчика кутового положення руля (напридвигунів з високим коефіцієнтом корисної дії, маклад, у 2,5-3 рази), виникали несиметричні автоколими габаритно-масовими характеристиками і виливання струму в обмотці електродвигуна, що сокою швидкодією. утруднювало проведення оцінки якості працездатБезпека старту керованих ракет і снарядів у ності системи. великій мірі визначається працездатністю слідкуНа Фіг.1 показана блок-схема пристрою, який вального електричного рульового приводу, вклюдозволяє реалізовувати запропонований спосіб чаючи систему його електроживлення і керування. передстартового контролю функціонування слідТому розробка простих, надійних способів і засобів кувального електричного рульового приводу. передстартового контролю функціонування слідСхема містить силове джерело живлення - ДЖ кувального електричного рульового приводу для (1), підсилювач слідкувального електричного рукерованих ракет і снарядів є актуальною задачею. льового приводу - ПП (2), суматор - S (3), виконавПропонований спосіб передстартового контчий електродвигун - Μ(4) з токоз’ємним вимірюваролю функціонування слідкувального електричнольним резистором – Rи (5), датчик кутового стану го рульового приводу з аретируваним вихідним руля - ДКСР (6), компаратор (7), за допомогою рулем заснований на створенні у слідкувальному якого здійснюють керування електронним ключем електричному рульовому приводі за допомогою (8), а також блок прийняття рішень про працездатзовнішніх зворотних зв'язків режиму стійких автоність приводу - БПР (9). коливань струму в обмотці електродвигуна і подаСпосіб реалізується за допомогою вищеопильшій оцінці функціонування електроприводу на саного пристрою таким чином. підставі вимірювань частоти виниклих автоколиФормують задане значення обертального мовань струму в його обмотці і порівняння її з напементу на рулі слідкувального електричного приворед заданою частотою автоколивань. ду шляхом аретирування рулів на заданому куті. Слід зазначити, що в непрацездатному слідкуПри включенні силового джерела живлення (1) вальному електричному рульовому приводі при і установки аретируваного руля у кутовому полотакому режимі автоколивання не виникають, тому женні, на датчику кутового стану руля (6) формупуск керованих снарядів і ракет у цьому випадку ють вихідну напругу (Ug), пропорційну заданому не проводять. кутовому відхиленню руля. Компаратор (7) привоПропонований спосіб забезпечує перевірку дять у стан, при якому ключ (8) знаходиться у ронаступних параметрів і режимів роботи слідкувазімкненому стані. льного електричного рульового приводу: наявність Вихідну напругу (Ug) подають через суматор зв'язку і нульового потенціалу з виходу автопілоту; (3) безпосередньо на вхід підсилювача (2) слідкунаявність живлячих напруг у підсилювачі слідкувавального електричного рульового приводу Uвx=Ug. льного електричного рульового приводу і на датЗа допомогою останнього формують напругу на чиках положення; цілісність ланцюгів датчика пообмотці виконавчого двигуна (4), достатню для ложення; проходження сигналів керування через створення виконавчим двигуном (4) наперед заданаскрізний тракт підсилювача рульового приводу; ного обертального обертального моменту (моменреверсивність підсилювача потужності; цілісність ту сил). Забезпечують наростання струму в обмоланцюгів електродвигуна; створення в електротці виконавчого електродвигуна (4) унаслідок двигуні заданого струму за допомогою підсилюваіндуктивного характеру його обмотки. ча потужності; можливість роботи навантаженого На токоз’ємному вимірювальному резисторі (5) приводу. відповідно забезпечують наростання напруги до За наявності відмов у слідкувальному електнаперед заданого порогового рівня, при якому ричному рульовому приводі при реалізації будьперемикають компаратор (7) в інше положення, якої з вищеперелічених перевірок автоколивання у внаслідок чого проводять замикання ключа (8). На приводі не виникають. суматор (3) подають керувальний сигнал рівня У свою чергу, подача на вхід підсилювача Uy=-2Ug, за допомогою якого, після складання з слідкувального електричного рульового приводу напругою Ug датчика кутового положення (6), фокерованого сигналу по рівню, що не менше, ніж у рмують на вході підсилювача (2) слідкувального два рази, перевищує рівень сигналу датчика кутоелектричного рульового приводу керувальний сигвого положення рулів у зааретируваному стані і нал рівня Uвx=-Ug. протилежного йому по знаку, зумовлена необхідніТаким чином, на вході підсилювача (2) форстю забезпечення симетричності виникаючих авмують керувальний сигнал заданого рівня Ug, але токоливань струму в обмотці електродвигуна (внапротилежного по знаку. За допомогою підсилюваслідок відсутності постійної складової струму в ча (2) слідкувального електричного рульового приобмотці електродвигуна). воду подають напругу на обмотку виконавчого При цьому було встановлено, що при подачі електродвигуна (4), в обмотці якого починає нарокерувального сигналу, що по рівню менше, ніж у стати струм. Відповідно забезпечують наростання два рази перевищував рівень сигналу датчика напруги на токоз’ємному вимірювальному резискутового положення руля, система працювала не в торі (5) до порогового рівня, при якому знову пе 7 87014 8 ремикають компаратор (7) і розмикають ключ (8). пропонований спосіб заснований на формуванні Унаслідок цього пристрій повертають у початковий високочастотних реверсивних коливань струму в стан. обмотці електродвигуна. Це також скорочує сумаДалі вищезгаданий процес повторюють перірний час на проведення контролю. одично, внаслідок чого забезпечують виникнення Пропонований спосіб передстартового контстійких автоколивань струму в обмотці виконавчоролю функціонування слідкувального електричного електродвигуна (4). Вимірюють частоту перемиго рульового приводу, що був апробований на макання компаратора (7) і порівнюють її з наперед кетних зразках на стенді при виконанні ДКР в заданою частотою за допомогою блоку прийняття державному підприємстві "ДержККБ "ЛУЧ" протярішень про працездатність приводу - БПР (9), унагом 2005-2006 p., показав високу ефективність і слідок чого оцінюють якість і стабільність функціонадійність. нування електроприводу, тобто приймають рішенДжерела інформації ня про його працездатність і можливість 1. RU №2145052. проведення пуску керованих снарядів або ракет. 2. Основы проектирования ракет класса «возТаким чином, у пропонованому способі безпедух-воздух» и авиационных катапультных устаноку старту керованих снарядів і ракет забезпечують вок. Под редакцией В.А. Нестерова, М., МАИ, 1999 проведенням надійного контролю функціонування г. - С.174-180. слідкувального електричного рульового приводу 3. Способ проверки качества функционировапри аретируваних рулях перед проведенням пуску. ния рулевых приводов и автопилотов управляеПри цьому у разі непрацездатності слідкувального мых снарядов и устройство для его осуществлеелектричного рульового приводу розаретирування ния. RU №2181681. МПК8 В64С13/36, F42B15/01. руля і пуск керованих снарядів і ракет не здійсню4. Способ проверки функционирования возють. душно-динамического рулевого привода управляКрім того, у запропонованому способі передемых снарядов или ракет и устройство для его стартового контролю відсутня операція по реверосуществления. RU №2218548. МПК8 F42B15/01. сивному механічному переміщенню руля, оскільки Комп’ютерна верстка В. Мацело Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for pre-launch control of servo electric actuator operation
Автори англійськоюBondarchuk Serhii Vasyliovych, Korosteliov Oleh Petrovych, Kachaiev Mykola Arkadiovych, Kuzmin Viacheslav Pavlovych, Kovalenko Oleksandr Volodymyrovych, Smishko Hryhorii Pavlovych
Назва патенту російськоюСпособ предстартового контроля функционирования следящего электрического рулевого привода
Автори російськоюБондарчук Сергей Васильевич, Коростелев Олег Петрович, Качаев Николай Аркадиевич, Кузьмин Вячеслав Павлович, Коваленко Александр Владимирович, Смишко Григорий Павлович
МПК / Мітки
МПК: F42B 15/01
Мітки: рульового, контролю, спосіб, передстартового, електричного, слідкувального, приводу, функціонування
Код посилання
<a href="https://ua.patents.su/4-87014-sposib-peredstartovogo-kontrolyu-funkcionuvannya-slidkuvalnogo-elektrichnogo-rulovogo-privodu.html" target="_blank" rel="follow" title="База патентів України">Спосіб передстартового контролю функціонування слідкувального електричного рульового приводу</a>
Спосіб передстартового контролю функціонування слідкувального електричного рульового приводу
Номер патенту: 26365
Опубліковано: 10.09.2007
Автори: Коростельов Олег Петрович, Качаєв Микола Аркадійович, Смішко Григорій Павлович, Коваленко Олександр Володимирович, Кузьмін В'ячеслав Павлович, Бондарчук Сергій Васильович
МПК: F42B 15/01
Мітки: рульового, спосіб, слідкувального, контролю, функціонування, електричного, приводу, передстартового
Формула / Реферат:
1. Спосіб передстартового контролю функціонування слідкувального електричного рульового приводу, що включає подачу електроживлення на слідкувальний електричний рульовий привід, формування керувального сигналу шляхом складання на вході підсилювача слідкувального електричного рульового приводу керувального сигналу і сигналу від датчика кутового положення руля, реєстрацію струму в обмотці електродвигуна і прийняття рішення про придатність...
Пристрій для контролю експлуатаційних характеристик електричного приводу і/або приєднаного до приводу механічного пристрою
Номер патенту: 46164
Опубліковано: 15.05.2002
Автори: Кутцер Хайнц, Бенке Харальд-Петер, Хорбах Роберт
МПК: G01R 31/34, G01R 31/00
Мітки: електричного, пристрій, приєднаного, механічного, пристрою, контролю, приводу, експлуатаційних, характеристик
Формула / Реферат:
1. Пристрій для контролю експлуатаційних характеристик електричного приводу (15) і/або приєднаного до приводу (15) механічного пристрою, причому до приводу (15) і/або механічного пристрою приєднаний блок (1), котрий має виводи (С, U, L, І) виконані з можливістю приєднання діагностичного модуля (2) , який відрізняється тим, що він містить пристрій енергопостачання для діагностичного модуля (2), виконаний з можливістю активування через...
Блок рульового приводу керованого снаряда
Номер патенту: 73800
Опубліковано: 15.09.2005
Автори: Комендантова Людмила Степанівна, Пащинський Валентин Петрович, Некращук Олександр Олександрович, Нарцев Іван Васильович
МПК: F42B 15/01
Мітки: керованого, блок, снаряда, рульового, приводу
Формула / Реферат:
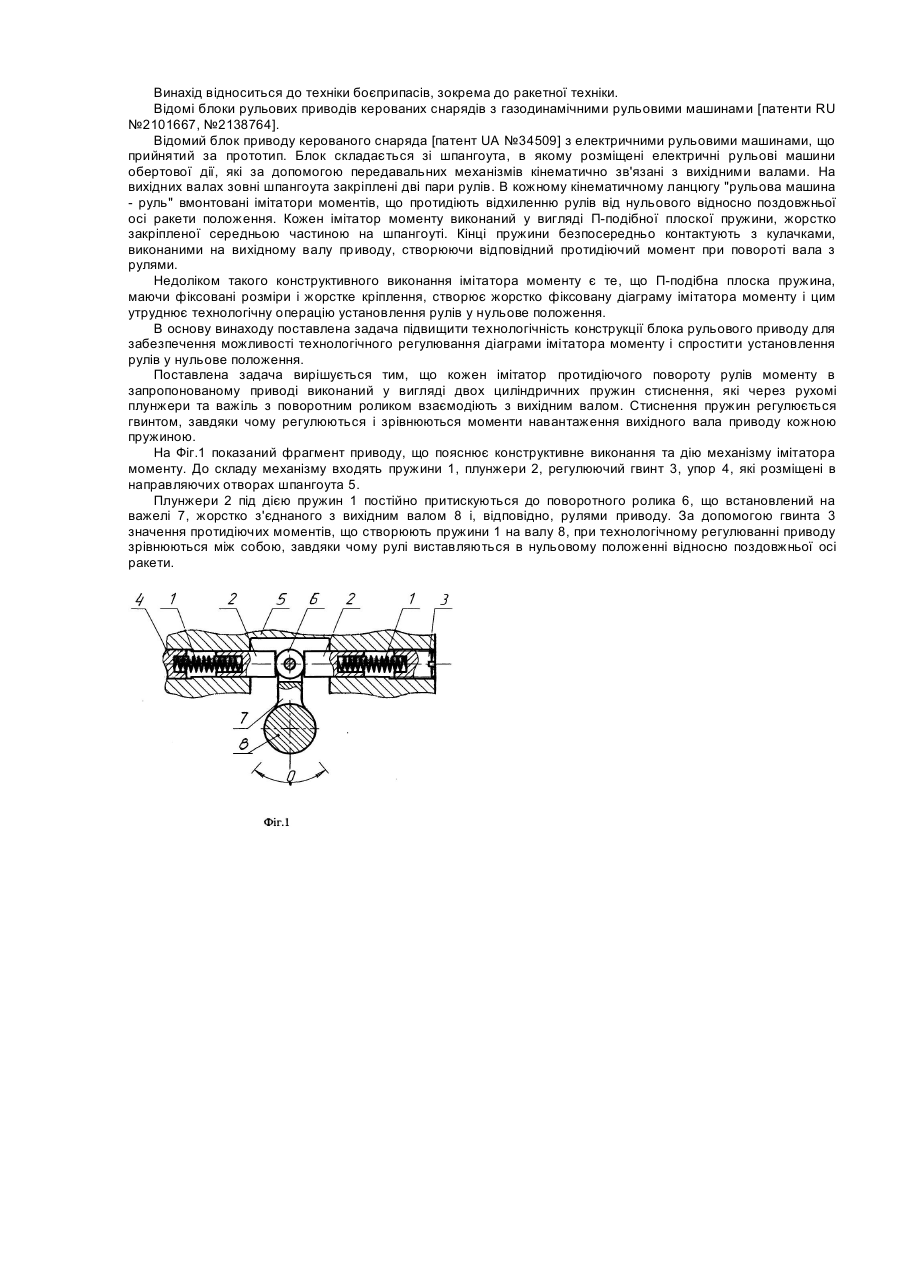
Блок рульового приводу керованого снаряда, що складається з двох пар рулів, які кінематично зв'язані з розміщеними в шпангоуті рульовими машинами у вигляді електричних реверсивних приводів обертової дії з встановленими в їх кінематичних ланцюгах пружними імітаторами протидіючих відхиленню рулів від нульового положення моментів, який відрізняється тим, що кожний імітатор моменту виконаний у вигляді двох розміщених одна проти одної пружин...
Пристрій для контролю електричного приводу
Номер патенту: 35577
Опубліковано: 16.04.2001
Автор: Кутцер Ханс
МПК: G01R 31/34
Мітки: контролю, пристрій, електричного, приводу
Формула / Реферат:
1. Устройство для контроля электрического привода, в частности привода арматуры, содержащее распределительное устройство со съемным блоком, через который проведены электрические линии питания привода, при этом съемный блок содержит съемники для подключения измерительного и анализирующего блока, отличающееся тем, что устройство дополнительно содержит линии измерения напряжения, одни концы которых соединены с электрическими линиями питания...
Спосіб контролю функціонування ступеневих перемикачів
Номер патенту: 52654
Опубліковано: 15.01.2003
Автори: Дональ Дітер, Хойдекер Крістіан, Фірек Карстен
МПК: H02J 3/00, H01F 29/00, H01H 9/00
Мітки: ступеневих, перемикачів, функціонування, контролю, спосіб
Формула / Реферат:
1. Спосіб контролю функціонування ступеневих перемикачів, який відрізняється такими ознаками:• з короткими інтервалами реєструють поточну вимірювану величину, що представляє фактичний стан контрольованого ступеневого перемикача;• під час комутації здійснюють реєстрацію поточного положення перемикача та прив'язку поточної визначеної вимірюваної величини до поточного положення;• загальний позиційний або часовий діапазон...
Попередній патент: Спосіб пуску керованої ракети з транспортно-пускового контейнера
Наступний патент: Тонкошаровий відстійник
Випадковий патент: Спосіб фітотерапії вторинних імунодефіцитних станів