Спосіб контролю функціонування ступеневих перемикачів
Номер патенту: 52654
Опубліковано: 15.01.2003
Автори: Хойдекер Крістіан, Фірек Карстен, Дональ Дітер

Формула / Реферат
1. Спосіб контролю функціонування ступеневих перемикачів, який відрізняється такими ознаками:
• з короткими інтервалами реєструють поточну вимірювану величину, що представляє фактичний стан контрольованого ступеневого перемикача;
• під час комутації здійснюють реєстрацію поточного положення перемикача та прив'язку поточної визначеної вимірюваної величини до поточного положення;
• загальний позиційний або часовий діапазон (t0-t7) поділяють на часткові діапазони (t0-t1 t1-t2,..., t6-t7), які для кожної комутації відповідають протікаючим одна за одною частковим функціям;
• всередині кожного часткового діапазону за певним алгоритмом обчислення визначають характеристичне значення вимірюваної величини (m1-m7);
• характеристичне значення вимірюваної величини (m1-m7) порівнюють з файлом параметрів, записаним в енергонезалежну пам'ять та класифікують таким чином, що йому ставлять у відповідність класифіковане значення у вигляді коду (00H-0DH);
• надалі лише цей код (00H-0DH) обробляють, запам'ятовують та використовують для видачі залежного від нього повідомлення.
2. Спосіб за п. 1, який відрізняється тим, що після прив'язки поточної вимірюваної величини до позиції здійснюють оцінку таким чином, що поточну вимірювану величину порівнюють з максимально допустимими граничними величинами (М1-М7), також записаними в файлі параметрів в енергонезалежній пам'яті, і при перевищенні граничної величини негайно формують повідомлення про небезпеку.
3. Спосіб за п. 1 або 2, який відрізняється тим, що в файлі параметрів відхилення (від - 30% до + 100%) вимірюваної величини записують у процентному відношенні до номінального значення (0) і встановлюють їх відповідність кодам (00H-0DH).
4. Спосіб за п. 3, який відрізняється тим, що перед початком контролю функціонування здійснюють нульове вимірювання на роботоздатному ступеневому перемикачі, у ході якого визначають номінальне значення (0) вимірюваної величини, яке використовують як початкове значення для файла параметрів.
5. Спосіб за одним з попередніх пунктів, який відрізняється тим, що обертальний момент на привідному валу між моторним приводом та ступеневим перемикачем використовують як вимірювану величину.
6. Спосіб за одним з попередніх пунктів, який відрізняється тим, що за алгоритмом обчислення вираховують середнє арифметичне значення.
Текст
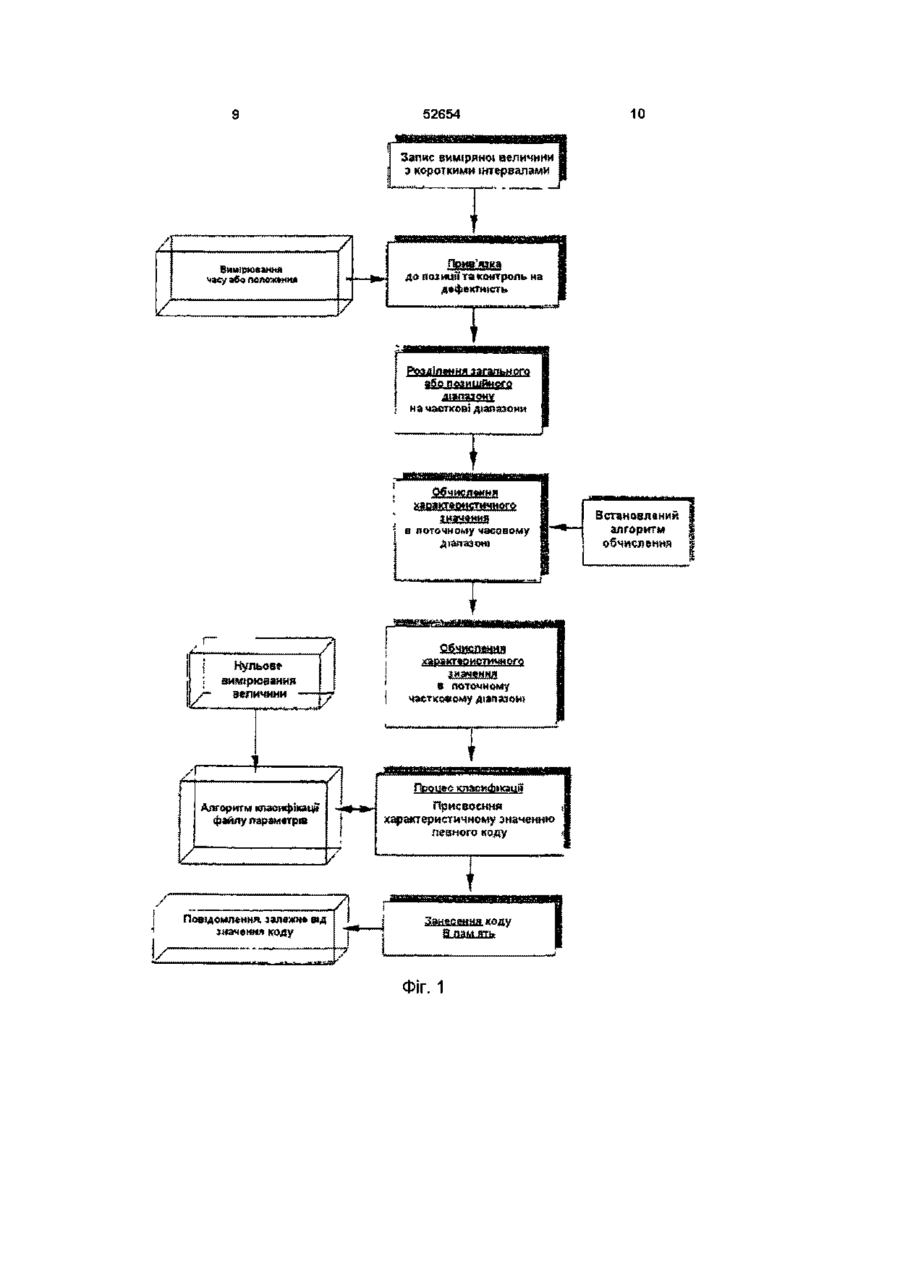
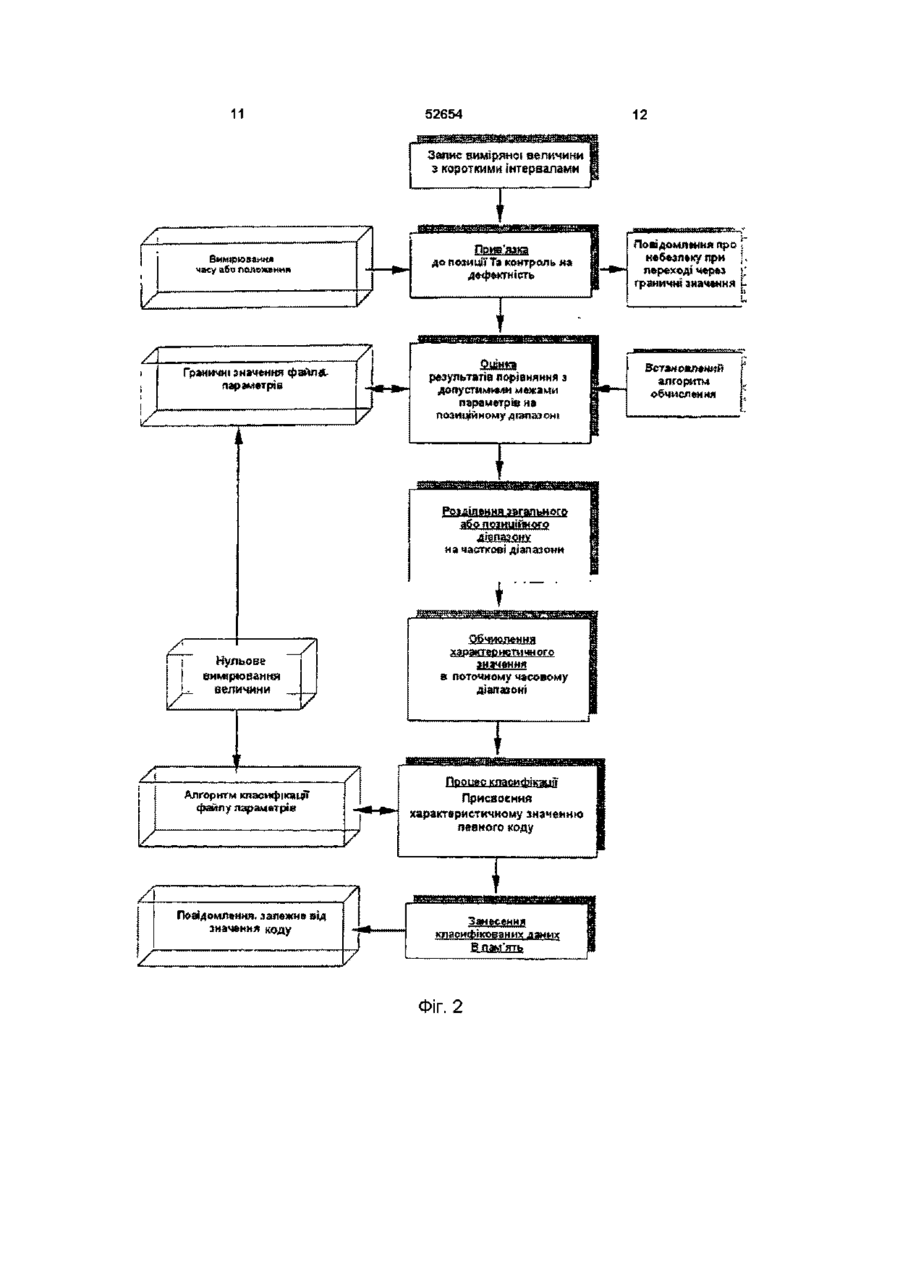
1 Спосіб контролю функціонування ступеневих перемикачів, який відрізняється такими ознаками • з короткими інтервалами реєструють поточну вимірювану величину, що представляє фактичний стан контрольованого ступеневого перемикача, • під час комутації здійснюють реєстрацію поточного положення перемикача та прив'язку поточної визначеної вимірюваної величини до поточного положення, • загальний позиційний або часовий діапазон (to-Ъ) поділяють на часткові діапазони (to-ti t-\-h, , te-Ь), які для кожної комутації відповідають протікаючим одна за одною частковим функціям, • всередині кожного часткового діапазону за певним алгоритмом обчислення визначають характеристичне значення вимірюваної величини (гти-т?), • характеристичне значення вимірюваної величини (ГП1-ГП7) порівнюють з файлом параметрів, записаним в енергонезалежну пам'ять та класифікують таким чином, що йому ставлять у ВІДПОВІДНІСТЬ класифіковане значення у вигляді коду (00H-0DH), • надалі лише цей код (00H-0DH) обробляють, запам'ятовують та використовують для видачі залежного від нього повідомлення 2 Спосіб за п 1, який відрізняється тим, що після прив'язки поточної вимірюваної величини до позиції здійснюють оцінку таким чином, що поточну вимірювану величину порівнюють з максимально допустимими граничними величинами (М1-М7), також записаними в файлі параметрів в енергонезалежній пам'яті, і при перевищенні граничної величини негайно формують повідомлення про небезпеку 3 Спосіб за п 1 або 2, який відрізняється тим, що в файлі параметрів відхилення (від - 30% до + 100%) вимірюваної величини записують у процентному відношенні до номінального значення (0) і встановлюють їх ВІДПОВІДНІСТЬ кодам (00H-0DH) 4 Спосіб за п 3, який відрізняється тим, що перед початком контролю функціонування здійснюють нульове вимірювання на роботоздатному ступеневому перемикачі, у ході якого визначають номінальне значення (0) вимірюваної величини, яке використовують як початкове значення для файла параметрів 5 Спосіб за одним з попередніх пунктів, який відрізняється тим, що обертальний момент на привідному валу між моторним приводом та ступеневим перемикачем використовують як вимірювану величину 6 Спосіб за одним з попередніх пунктів, який відрізняється тим, що за алгоритмом обчислення вираховують середнє арифметичне значення Винахід стосується способу контролю функціонування ступневих перемикачів причому зареєстровані вимірювані величини порівнюються та класифікуються Із публікації японського патенту Неі-2-213105 вже відомий спосіб контролю функціонування ступневих перемикачів, причому реєструються різні вимірювані величини такі як тиск навантаження виконавчих елементів, струм та забруднення масла, які описують актуальний реальний стан ступневого перемикача, ці вимірювані величини запам'ятовуються та порівнюються з попередньо також занесеними в пам'ять типовими номінальними величинами Якщо це порівняння виявляє відхилення, то формуються повідомлення які можуть привести як О ю (О ю З 52654 до попередження так І до негайного відключення 409 згідно з яким при комутації також вимірюється ступневого перемикача часова характеристика обертового моменту і результат вимірювання порівнюється з типовою чаКрім того, із опису патенту до винаходу ФРН совою характеристикою обертового моменту для DE 42 14 431 відомий спосіб реєстрації положення ВІДПОВІДНОГО ступневого перемикача для ступневого перемикача, причому за допомогою датчика положення реєструється поточне поВимірювані величини, які пізніше порівнюютьложення приводного валу моторного приводу, ся з номінальними значеннями запам'ятовуються в сполученого з ступневим перемикачем та за доосновному, як правило, у вигляді ASCII-файла помогою пристрою обробки даних перетворюється В деяких випадках здійснюють ущільнення дав бінарне число яке в свою чергу з надлишком них для того, щоб можна було максимально викоможе далі оброблятися як схемою апаратного деристовувати об'єм пам'яті ВІДПОВІДНОГО носія кодування так І м ікро контроле ром Таким чином Бнформацм/ мікроконтролер через датчик положення контроВимірювані величини у вигляді ряду абсолютлює рух приводного валу них значень в момент запису заносяться в пам'ять носія Бнформацм Висновок про вагові коефіцієнти Крім того з японської патентної заявки Sho-60цих даних реалізується шляхом параметризацм 176213 відомо що обертовий момент приводного вхідного каналу валу що веде від моторного приводу до ступневого перемикача при кожному спрацюванні Із друкованого видання Hydro TEC HT2000 фіступневого перемикача можна виміряти та запарми Дельтатронік Інструменте ГмбХ AT відомий м'ятати для того, щоб характеристиці фактичного спосіб при якому дані про значення та Інтервал обертового моменту можна було протиставити часу відповідної вимірюваної величини заносяться типову характеристику номінального обертового в пам ять у вигляді ASCII-файли, який у наступномоменту Схожий спосіб описаний в патенті DD 246 му прикладі потребує ЗО байт пам'яті Стартовий час з вимірюваною величиною 114911 28 Закінчення вимірювання 125911 17 (17 як нове значення наступного вимірювання) Адреса Значення Адреса Значення 00 FF 20 31 01 31 21 32 02 31 22 ЗА 03 ЗА 23 35 04 34 24 39 05 39 25 ЗА 06 ЗА 26 31 07 31 27 31 08 31 28 20 09 20 29 20 ОА 20 2А 20 ОВ 20 2В 31 ОС 32 2С 37 OD 38 2D OD ОЕ 00 2Е ОА OF ОА 2F FF Наступний варіант запам'ятовування вимірюваних даних відомий із дисертації Фірека (Viereck) Використання сенсорів в трансформаторах, Технічний університет, Дрезден 1992 рік Згідно з ним, через певний встановлений період часу, який розкладається на певні часові Інтервали поряд з поПриклад Адреса 01 02 03 04 Значення FF FF ОЕ 1С стінною аналоговою величиною відкладається КІЛЬКІСТЬ часових інтервалів у вигляді шістнадцятеричного числа таким чином, що лише за двома адресами можуть фіксуватися в пам'яті носія інформації ЗМІННІ проміжки часу Таким чином, на носи інформації під адресами ОЗН та 04Н записана інформація про те що для 14 Інтервалів (шістнадцятеричний еквівалент ОЕ Н) результат вимірювання дорівнював 28 (шістнадцятеричний еквівалент 1С Н) Завдяки інформації про стартовий час процесу вимірювання в керуючому обчислювальному пристрої та припускаючи, що Інтервал вимірювання відповідає певному часу, що дорівнює близько 5 хвилинам можуть бути перекриті порівняно великі часові проміжки при постійному вимірюванні ЦІ ВІДОМІ способи мають ряд недоліків Якщо здійснюється компресія даних за традиційними способами обробки даних, то ці величини неможливо безпосередньо, без декомпресії, порівнювати між собою Крім того, занесені в пам'ять дані містять інформацію лише про їхні абсолютні значення і таким чином лише за цим критерієм можуть бути корельовані з вимірюваними величинами інших послідовностей Крім того висновок про вихід вимірюваних зна чень для даного зразка перемикача за межі граничних значень вимагає індивідуального визначення цих граничних значень Наприклад в разі ступеневих перемикачів для яких обертовий момент реєструється та оцінюється як Індекс їхнього стану доцільно встановити граничні величини в залежності від номінального значення при переході через які повинно видаватися повідомлення Так, наприклад, може бути встановлено що 300%-не перекриття номінального обертового моменту в кожному випадку вимагає відключення приводу, однак перекриття більш ніж на 150% ІНІЦІЮЄ повідомлення "більше недопустимо І не призводить до негайного відключення, однак в межах моніторингу системи запам'ятовується та оцінюється як фактор що вказує на необхідність проведення негайного обслуговування Номінальне значення обертового моменту кожному випадку є базою для граничних значень Це значення відповідає 100% одначе, може бути апаратно диференційованим Порівняння абсолютних значень у цьому випадку не призводять до видачі 05 06 Об 11 07 FF1 08 FF 52654 файл параметрів показника, який представляє цей результату часовий або позиційний діапазон Нарешті, недоліком відомих способів є потреЗапам'ятовуються лише отримані з файла паба в накопичувачі з великим об'ємом пам'яті яка раметрів показники, які описують характеристичні необхідна для того щоб зареєструвати та оцінити значення окремих сегментів процесу Таким чином, поточні вимірювані значення власне вимірювані дані вихідного файла отримуЗадачею винаходу є запропонувати спосіб, що ють криптографічний характер уможливлює оцінку специфічних для об'єкта вимірювання індивідуальних граничних значень, приСпосіб дозволяє шляхом посилання на величому також дозволяє виконувати ущільнення дачини, які визначаються при знаходженні номінальних таким чином, який дає можливість з них поточних значень, тобто відповідають 100% мінімально необхідним об'ємом пам'яті провадити номіналу, провадити безпосереднє порівняння з реєстрацію, порівняння та занесення в пам'ять даними Інших приладів вимірюваних величин та порівнювальних величин Однак оригінальні значення, при наявності інякі представляють перемикач, що підлягає контформації з файла- параметрів та класифікаційного ролю, і за результатами цього порівняння видаваалгоритму, можуть бути знову відновлені ти повідомлення Згідно З винаходом, ця задача Нижче цей спосіб більш детально пояснено за вирішується способом, що має ознаки, викладені в допомогою наступних фігур На них зображено п 1 формули винаходу Фіг 1 - схематичне представлення етапів реалізації способу згідно з винаходом, Додаткові пункти формули стосуються особливо вигідних удосконалень цього способу Фіг 2 - схематичне представлення способу, вдосконаленого за допомогою додаткових етапів, За даним способом здійснюють багатократне ущільнення накопичених для контролю функціонуФіг 3 - фізичний процес оцінки вимірюваної вання вимірюваних та порівняльних величин величини в часовому діапазоні для способу представленого на фіг 2 Спочатку здійснюють перше ущільнення, внаслідок цього поточним вимірюваним величинам Насамперед має бути описаний спосіб, представиться у ВІДПОВІДНІСТЬ ПОЗИЦІЯ, тобто, актуальне ставлений на фіг 1 При цьому типова вимірювана положення ступеневого перемикача під час комувеличина для контролю функціонування ВІДПОВІДтації Ця позиція реєструється як безпосередньо, НОГО ступеневого перемикача за короткі Інтервали наприклад, за допомогою обчислювального приреєструється та заноситься в пам'ять Як приклад строю так І побічно за допомогою вимірювання тут вибрана реєстрація обертового моменту причасу водного валу моторного приводу, за допомогою якого приводиться в дію ВІДПОВІДНИЙ ступеневий Друге ущільнення здійснюється завдяки тому, перемикач Однак, винахід не обмежується лише що загальна позиція, при проходженні якої відбузаписом вимірюваної величини обертового моменвається повна комутація навантаження ступеневоту го перемикача, підрозділяється на окремі діапазони і для кожного такого діапазону за певним Потім записана вимірювана величина, в даноалгоритмом обчислення визначається одиничне му випадку поточний обертовий момент, характеристичне значення вимірюваної величини зв'язується з ВІДПОВІДНОЮ активною позицією ступеневого перемикача під час комутації Нарешті третє ущільнення відбувається завдяки тому, що це характеристичне значення поріРеєстрація поточної позиції може бути реалівнюється та класифікується з попередньо записазована безпосередньо наприклад за допомогою ним файлом параметрів, в результаті цього обчислювального пристрою на приводному валу, запам'ятовуються лише класифіковані дані необабо ж побічно, шляхом вимірювання часу При хідні для задачі кореспондованих повідомлень або цьому вимірювання відміченого часу починають в попереджень момент, коли приводиться в дію моторний привід і таким чином починається процес комутації ВІДПООтже результатом винайденого способу є криВІДНОГО ступеневого перемикача птографічні дані які більш не мають зворотного зв'язку з початковими вимірюваними величинами Наступним кроком увесь позиційний або часовий діапазон, який ступеневий перемикач прохоЗгідно З вдосконаленням що має особливі педить при кожній повній комутації, підрозділяється реваги цей спосіб сам надає можливість установна часткові діапазони, типові для процесу комуталення граничних величин специфічних щодо контції На фіг 3 наведені такі типові часткові діапазони рольованого об'єкта в тому, що проходить Проміжки часу від моменту to до ^ обмежують ВІДреєстрація поточного номінального значення, і ПОВІДНІ ТИПОВІ, що слідують одна за Іншою, події після цього за процентними значеннями уставок комутаційної ПОСЛІДОВНОСТІ І встановлюють таким для граничних величин(визначається та запам'ячином, ВІДПОВІДНІ часткові діапазони товується їх абсолютний рівень Таким чином необхідні параметри містять лиВ свою чергу в кожному пройденому часткоше ВІДНОСНІ величини які відповідають номінальвому діапазоні обчислюються ВІДПОВІДНІ характеним значенням ристичні значення записаних вимірюваних велиПідводячи підсумок, винайдений спосіб можна чин, в даному випадку значення обертового характеризувати таким чином моменту Це обчислення характеристичного значення відбувається за попередньо встановленим Класифікація даних відбувається всередині правилом ВІДПОВІДНИМ способом в даному випадку часового або позиційного діапазону в результаті може вираховуватись арифметичне середнє знаобчислення характеристичного значення записачення або середня величина них вимірюваних величин та Ідентифікації занесеного для цього характеристичного значення у Потім ЗДІЙСНЮЄТЬСЯ пов'язана з попередньою 52654 процедурою Ідентифікація цих визначених характеристичних значень з відомими кодами Для цього використовується файл параметрів який містить класифікаційний алгоритм і попередньо запам'ятовується в енергонезалежній пам'яті В цьому файлі параметрів певні вимірювані величини, тобто визначені значення обертового моменту поставлені у ВІДПОВІДНІСТЬ кодам Особлива перевага виникає тоді, коли ці вимірювані величини представлені як процентне відхилення від відповідної номінальної величини тобто від номінального значення обертового моменту При цьому доцільним в плані удосконалення способу є представлення нульового вимірювання відповідної величини, при якому визначається та запам'ятовується її номінальне значення і яке служить основою для класифікаційного алгоритму файла параметрів Як було вже вище представлено, є цілком реальним той факт, що це номінальне значення вимірюваної величини, в даному випадку номінальний обертовий момент характеризується широким діапазоном в залежності від типу або екземпляра перемикача Завдяки описаному нульовому вимірюванню для порівняння вимірюваної еличини є можливість, незважаючи на ці різні початкові позиції, в файлі параметрів процентним відхиленням поставити у ВІДПОВІДНІСТЬ безпосередньо коди Запам'ятовуються лише ці короткі коди які в кінцевому результаті використовуються для контролю функціонування За ВІДПОВІДНИМИ кодами які виводяться в результаті описаного порівняння характеристичних величин з файлом параметрів формуються необхідні повідомлення або дані Це також зображено на фіг 3 видно що при цьому представленні різні коди можуть приводити до одного повідомлення На фіг 2 зображено вдосконалений спосіб При цьому відбувається за вже описаною прив'язкою до поточної позиції в результаті вимірювання положення або часу ще додаткове - як наступний підетап способу - порівняння записаної вимірюваної величини з допустимими параметрами в позиційному діапазоні Це відбувається завдяки тому, 8 що складовою частиною файла, параметрів є також максимально допустимі граничні величини При перевищенні цих максимально допустимих граничних величин в кожному випадку видається негайне повідомлення про небезпеку яке як правило, приводить до негайного відключення двигуна Фіг 3 показує загальний фізичний хід реалізації способу контролю функціонування У верхній частині показано запис вимірюваних величин обертового моменту М а на приводному валу моторного приводу Ця вимірювана величина через зареєстрований поточний момент часу t логічно зв'язується з позицією ступеневого перемикача під час перемикання Процес перемикання розпочинається з моменту часу to І закінчується в момент часу V Цей загальний процес перемикання розподіляється на сім окремих діапазонів, які зображені в середній частині фіг 3 в табличному вигляді з ВІДПОВІДНИМИ функціональними процесами всередині комутаційної ПОСЛІДОВНОСТІ Так само схематично зображені у ВІДПОВІДНИХ часових і, ВІДПОВІДНО ПОЗИЦІЙНИХ діапазонах максимально допустимі номінальні обертові моменти від М1 до М7 Нарешті зображені також розраховані згідно Із застосованим алгоритмом обчислення характеристичні значення від м1 до м7 для кожного часткового діапазону В нижній частині фіг 3 для прикладу зображений варіант файла параметрів в якому встановлена ВІДПОВІДНІСТЬ між визначеними відхиленнями виміряного обертового моменту М а від ВІДПОВІДНОГО номінального обертового моменту і кодами В свою чергу різні коди в результаті контролю функціонування ІНІЦІЮЮТЬ різні повідомлення Показано що при великих відхиленнях видається повідомлення "зупинити" яке призводить до негайного відключення а при менш значних відхиленнях видається повідомлення "Необхідне обслуговування яке не має впливу на поточний режим функціонування При незначних відхиленнях обертовий момент вважають нормальним 10 52654 Запис виміряної еелимиии з короткими інтервалами т / Вимірювання часу або гівпож»мня до поіиціїта контроль на дефектність / Розділення загаг%ного або позишйного _______ І а поточному часовому И~^—І г~ j Нульове і вимірювання у- величини характеристичного У У Алгоритм класифікації файлу параметрів в поточному частковому діапазон! Процес класифікації Присвоєння характеристичному значенню певного коду і/ І 1 Повідомлення, залежи» від значення коду їхФІГ. 1 Встановлений алгоритм обчислення 11 52654 12 Запис виміряної величини з короткими Інтервалами А Вимірюваній часу або положення А. допозиціїТа контроль на дефектність Оцінка результатів порівняння з допустимими межами параметрів на позиційному діапазоні Граничні значення файл*, параметрів на часткові діапазони і [~ Нульове вимірювання величини значення в поточному часовому діапазоні Алгоритм класифікації файлу параметрів Присвоєння характеристичному значенню певного коду 7 А Повідомлення, залежне від значення коду класифікованих дамих 7 Фіг. 2 Повідомлення про небезпеку при переході через граничні значення u Встановлений алгоритм обчислення 13 14 52654 Час Проходження циклу Носимыми Обертами ноимнт Процес функціонування Середнє значення Ml Час Початок ооергэмня маяьтійсьжого механізму ml •**M2 ! течиог» t u f f я і щ і к m2 Ьг — t j мз і t>-t* М4 Комутація евпмегорі стуявиів точного рігулювшвм та т4 U-t, М5 Мб te~t7 М7 Включання ярвсапмспчя (змикання точного сея«*то[и 1кіи«нь обертання мшизтМского механізму Стривок п«р«иинч» т5 ts-t* ВШткпшт прьсятжтрш Відхилення аш номінального обертового моменту I >100% 90% 80% 70% 60% £0% 40% 30% 20% 10% „_Q -10% -20%
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for monitoring operation of a multiposition switch
Автори англійськоюDonald Dieter
Назва патенту російськоюСпособ контроля работы многопозиционного переключателя
Автори російськоюДональд Дитер
МПК / Мітки
МПК: H01H 9/00, H02J 3/00, H01F 29/00
Мітки: ступеневих, спосіб, контролю, перемикачів, функціонування
Код посилання
<a href="https://ua.patents.su/7-52654-sposib-kontrolyu-funkcionuvannya-stupenevikh-peremikachiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю функціонування ступеневих перемикачів</a>
Перемикальний пристрій для навантажувальних перемикачів ступеневих вимикачів і для навантажувальних селекторів (варіанти)
Номер патенту: 44268
Опубліковано: 15.02.2002
Автори: Лісманн-Міске Ханс-Хеннінг, Дохналь Дітер, Неймейєр Джозеф, Пільмейєр Леонард
МПК: H01F 29/00, H01H 9/00
Мітки: пристрій, перемикальний, ступеневих, варіанти, навантажувальних, вимикачів, селекторів, перемикачів
Формула / Реферат:
1. Переключающее устройство для нагрузочных переключателей ступенчатых выключателей и для нагрузочных селекторов, содержащее, по меньшей мере, два неподвижных ступенчатых контакта и два коммутационных контакта, перемещаемых в двух направлениях и переключающих нагрузочное ответвление с первого неподвижного ступенчатого контакта на второй, причем первый - главный коммутационный контакт выполнен с возможностью соединения непосредственно с...
Спосіб контролю гарантованої якості виробів радіоелектронної техніки
Номер патенту: 29358
Опубліковано: 16.10.2000
Автори: Жердєв Микола Костянтинович, Лучко Ігор Миколайович
МПК: G01R 35/00
Мітки: якості, спосіб, контролю, радіоелектронної, техніки, гарантованої, виробів
Формула / Реферат:
Спосіб контролю гарантованої якості виробів радіоелектронної техніки, що включає вимірювання параметрів вузлів та блоків і порівняння вимірених параметрів з допустимими, який відрізняється тим, що з числа N елементів виробу випадковим образом формують вибірку в обсязі з n елементів , причому n << Ν, вимірюють значення параметрів у визначені проміжки часу та отримують апріорну інформацію для поділу елементів на класи, після чого...
Прилад для реалізації способу визначення вартості електроенергії, що оплачується за диференціальним тарифом та спосіб, що забезпечує функціонування приладу
Номер патенту: 50518
Опубліковано: 15.10.2002
Автори: Пархоменко Володимир Лукич, Брикалов Олег Іванович, Риклін Фавелій Григорович, Самара Віктор Вікторович, Щепак Ренажан Миколайович
МПК: G01R 11/56
Мітки: спосіб, тарифом, оплачується, способу, реалізації, визначення, електроенергії, прилад, забезпечує, приладу, вартості, функціонування, диференціальним
Формула / Реферат:
1. Прилад для реалізації способу визначення вартості електроенергії, що оплачується за диференціальним тарифом, який містить в собі однотарифний лічильник електроенергії та виконавчий пристрій у вигляді переривника напруги або струму, з'єднаного з блоком керування переривником, який відрізняється тим, що блок керування переривником устаткований пристроєм для зміни параметрів його роботи, включаючи значення зональних тарифів або коефіцієнтів...
Спосіб нормалізації функціонування органів та систем організму
Номер патенту: 36128
Опубліковано: 16.04.2001
Автор: Ктеніді Раїса Йосипівна
МПК: A61N 5/06, C03C 25/00
Мітки: спосіб, систем, нормалізації, функціонування, органів, організму
Формула / Реферат:
Спосіб нормалізації функціонування органів та систем організму людини шляхом застосування енергетичного впливу на організм пацієнта, який відрізняється тим, що енергетичний вплив (під, контролем оператора) здійснюють за допомогою мінералу, що його вибирає особисто пацієнт у відповідь на виникнення почуття комфортності, яке з'являється у нього від енергоінформаційного контакту з певним мінералом, що відбувається візуальним і/або...
Спосіб функціонування централізовано керованої комутаційної установки далекого зв’язку
Номер патенту: 41243
Опубліковано: 17.09.2001
Автори: Шрьодер Франц, Шлаг Ріхард
МПК: H04Q 11/04, H04Q 3/545, H04M 3/00
Мітки: централізовано, комутаційної, керованої, далекого, спосіб, установки, функціонування, зв'язку
Формула / Реферат:
1. Способ функционирования централизованно управляемой коммутационной установки дальней связи, в процессе которого один из дублирующих друг друга центральных процессоров настраивают на режим переключения из активного режима, в котором такой процессор отвечает за установление соединений дальней связи через относящуюся к нему часть продублированного коммутационного поля, на режим готовности, в котором такой процессор параллельно к...
Попередній патент: Друкарська машина для трафаретного друку (варіанти)
Наступний патент: Гайка та пристрій для затягування, який її містить
Випадковий патент: Спосіб медичної реабілітації хворих на хронічне обструктивне захворювання легень, сполучене з неалкогольним стеатогепатитом, на тлі туберкульозу легень