Пристрій дистанційного визначення орієнтації об’єкта

Формула / Реферат
Пристрій дистанційного визначення орієнтації об’єкта, що містить інформаційні елементи (IE), розміщені в двох паралельних площинах, перпендикулярних до осі Y координатної системи об’єкта так, що конфігурація, утворена елементами однієї площини, пов'язана з конфігурацією елементів другої площини проективним перетворенням в напрямку осі Y, який відрізняється тим, що в кожній площині розміщено два IE так, що прямі, які їх з'єднують, паралельні осі X координатної системи об’єкта, причому IE виконані у вигляді самосвітних елементів малих розмірів, осі пучків яких паралельні осі Y, а в зоні, освітленій цими пучками, міститься цифрова телекамера, що реєструє зображення IE.
Текст
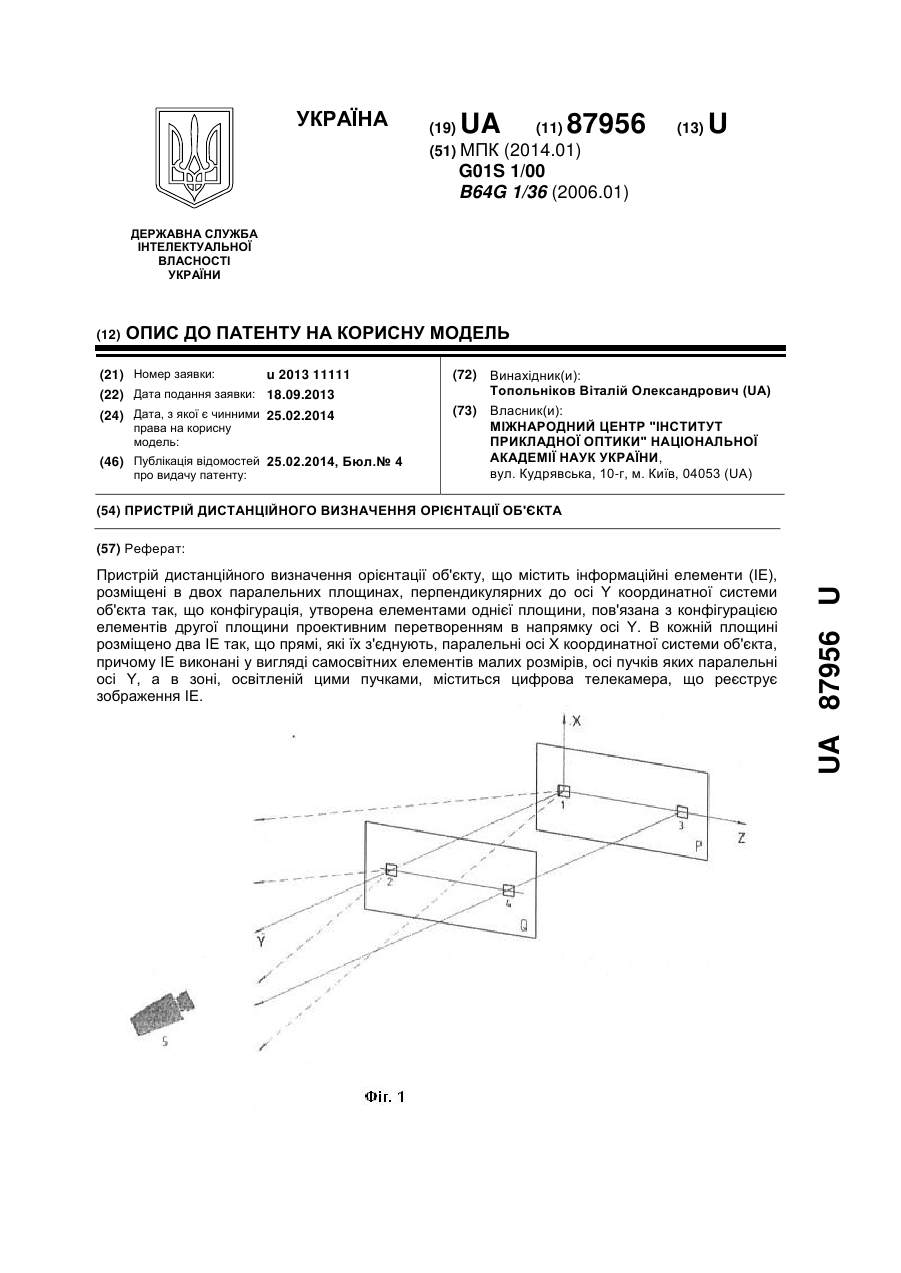
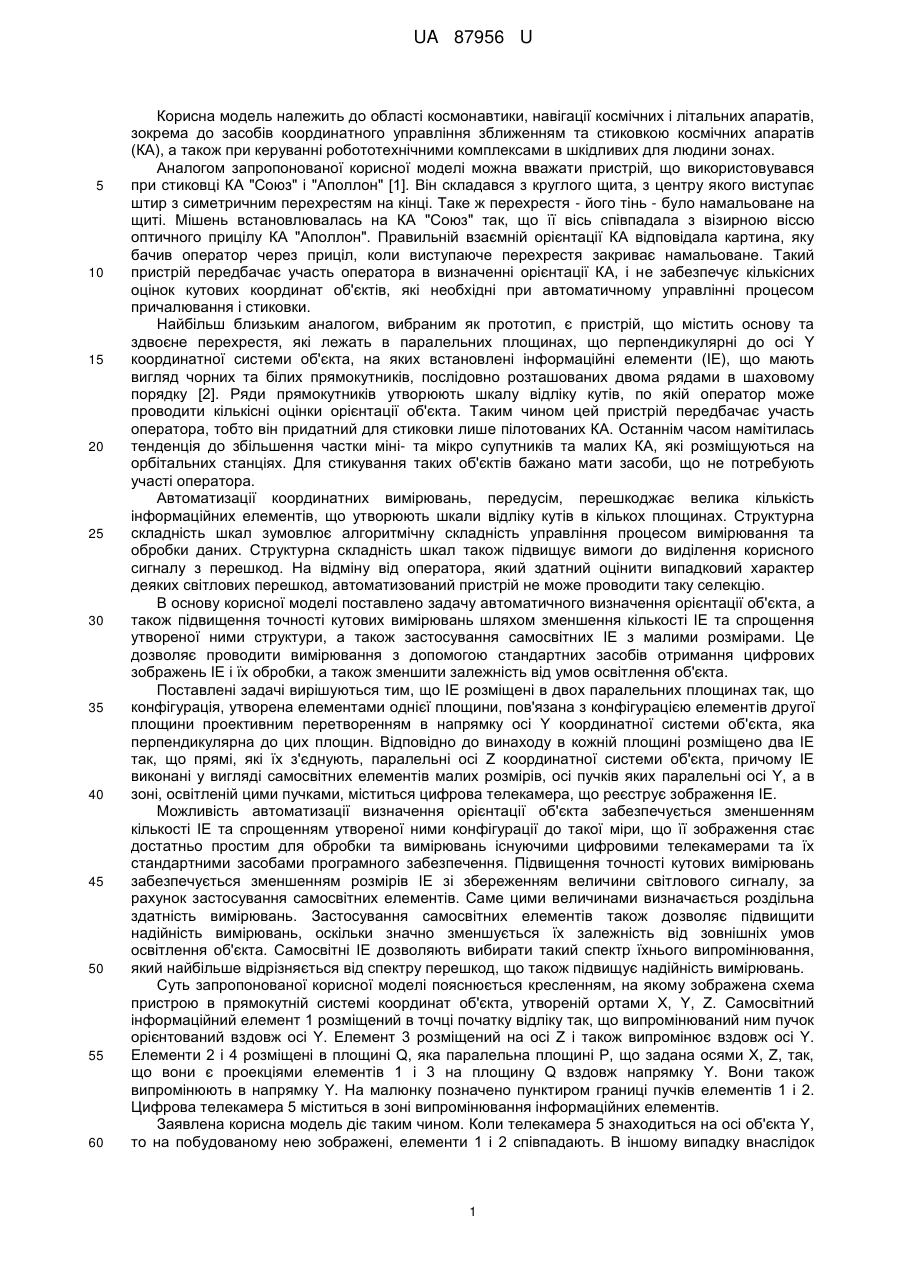
Реферат: UA 87956 U UA 87956 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області космонавтики, навігації космічних і літальних апаратів, зокрема до засобів координатного управління зближенням та стиковкою космічних апаратів (КА), а також при керуванні робототехнічними комплексами в шкідливих для людини зонах. Аналогом запропонованої корисної моделі можна вважати пристрій, що використовувався при стиковці КА "Союз" і "Аполлон" [1]. Він складався з круглого щита, з центру якого виступає штир з симетричним перехрестям на кінці. Таке ж перехрестя - його тінь - було намальоване на щиті. Мішень встановлювалась на КА "Союз" так, що її вісь співпадала з візирною віссю оптичного прицілу КА "Аполлон". Правильній взаємній орієнтації КА відповідала картина, яку бачив оператор через приціл, коли виступаюче перехрестя закриває намальоване. Такий пристрій передбачає участь оператора в визначенні орієнтації КА, і не забезпечує кількісних оцінок кутових координат об'єктів, які необхідні при автоматичному управлінні процесом причалювання і стиковки. Найбільш близьким аналогом, вибраним як прототип, є пристрій, що містить основу та здвоєне перехрестя, які лежать в паралельних площинах, що перпендикулярні до осі Y координатної системи об'єкта, на яких встановлені інформаційні елементи (IE), що мають вигляд чорних та білих прямокутників, послідовно розташованих двома рядами в шаховому порядку [2]. Ряди прямокутників утворюють шкалу відліку кутів, по якій оператор може проводити кількісні оцінки орієнтації об'єкта. Таким чином цей пристрій передбачає участь оператора, тобто він придатний для стиковки лише пілотованих КА. Останнім часом намітилась тенденція до збільшення частки міні- та мікро супутників та малих КА, які розміщуються на орбітальних станціях. Для стикування таких об'єктів бажано мати засоби, що не потребують участі оператора. Автоматизації координатних вимірювань, передусім, перешкоджає велика кількість інформаційних елементів, що утворюють шкали відліку кутів в кількох площинах. Структурна складність шкал зумовлює алгоритмічну складність управління процесом вимірювання та обробки даних. Структурна складність шкал також підвищує вимоги до виділення корисного сигналу з перешкод. На відміну від оператора, який здатний оцінити випадковий характер деяких світлових перешкод, автоматизований пристрій не може проводити таку селекцію. В основу корисної моделі поставлено задачу автоматичного визначення орієнтації об'єкта, а також підвищення точності кутових вимірювань шляхом зменшення кількості IE та спрощення утвореної ними структури, а також застосування самосвітних IE з малими розмірами. Це дозволяє проводити вимірювання з допомогою стандартних засобів отримання цифрових зображень IE і їх обробки, а також зменшити залежність від умов освітлення об'єкта. Поставлені задачі вирішуються тим, що IE розміщені в двох паралельних площинах так, що конфігурація, утворена елементами однієї площини, пов'язана з конфігурацією елементів другої площини проективним перетворенням в напрямку осі Y координатної системи об'єкта, яка перпендикулярна до цих площин. Відповідно до винаходу в кожній площині розміщено два IE так, що прямі, які їх з'єднують, паралельні осі Z координатної системи об'єкта, причому IE виконані у вигляді самосвітних елементів малих розмірів, осі пучків яких паралельні осі Y, а в зоні, освітленій цими пучками, міститься цифрова телекамера, що реєструє зображення IE. Можливість автоматизації визначення орієнтації об'єкта забезпечується зменшенням кількості IE та спрощенням утвореної ними конфігурації до такої міри, що її зображення стає достатньо простим для обробки та вимірювань існуючими цифровими телекамерами та їх стандартними засобами програмного забезпечення. Підвищення точності кутових вимірювань забезпечується зменшенням розмірів IE зі збереженням величини світлового сигналу, за рахунок застосування самосвітних елементів. Саме цими величинами визначається роздільна здатність вимірювань. Застосування самосвітних елементів також дозволяє підвищити надійність вимірювань, оскільки значно зменшується їх залежність від зовнішніх умов освітлення об'єкта. Самосвітні IE дозволяють вибирати такий спектр їхнього випромінювання, який найбільше відрізняється від спектру перешкод, що також підвищує надійність вимірювань. Суть запропонованої корисної моделі пояснюється кресленням, на якому зображена схема пристрою в прямокутній системі координат об'єкта, утвореній ортами X, Y, Z. Самосвітний інформаційний елемент 1 розміщений в точці початку відліку так, що випромінюваний ним пучок орієнтований вздовж осі Y. Елемент 3 розміщений на осі Z і також випромінює вздовж осі Y. Елементи 2 і 4 розміщені в площині Q, яка паралельна площині Р, що задана осями X, Z, так, що вони є проекціями елементів 1 і 3 на площину Q вздовж напрямку Y. Вони також випромінюють в напрямку Y. На малюнку позначено пунктиром границі пучків елементів 1 і 2. Цифрова телекамера 5 міститься в зоні випромінювання інформаційних елементів. Заявлена корисна модель діє таким чином. Коли телекамера 5 знаходиться на осі об'єкта Y, то на побудованому нею зображені, елементи 1 і 2 співпадають. В іншому випадку внаслідок 1 UA 87956 U 5 10 паралаксу, елементи виглядають роздільними. Відстань між ними однозначно зв'язана з кутом між оптичною віссю телекамери та віссю Y простими тригонометричними співвідношеннями. Таким чином вимірювання відстані між зображеннями всього двох IE (1 і 2) дозволяє визначати величину кута між оптичною віссю телекамери та віссю Y. Проте цього недостатньо для визначення орієнтації об'єкта, оскільки залишається не визначеним положення площини, в якій лежать ці осі. Для прив'язки цієї площини до системи координат об'єкта в пристрій введено IE 3, що розміщений на осі Z. Елемент 4 не є необхідним для визначення орієнтації об'єкта. Фактично він лише дублює функції елементу 2. Його доцільність полягає в підвищенні надійності вимірювань при великому рівні оптичних перешкод. Джерела інформації: 1.""Союз" и "Аполлон"". - М: Издательство политической литературы, 1976, с. 108 и 109. 2. Патент Росії RU 2462732 С1, 20. 10. 1997. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Пристрій дистанційного визначення орієнтації об’єкта, що містить інформаційні елементи (IE), розміщені в двох паралельних площинах, перпендикулярних до осі Y координатної системи об’єкта так, що конфігурація, утворена елементами однієї площини, пов'язана з конфігурацією елементів другої площини проективним перетворенням в напрямку осі Y, який відрізняється тим, що в кожній площині розміщено два IE так, що прямі, які їх з'єднують, паралельні осі X координатної системи об’єкта, причому IE виконані у вигляді самосвітних елементів малих розмірів, осі пучків яких паралельні осі Y, а в зоні, освітленій цими пучками, міститься цифрова телекамера, що реєструє зображення IE. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюTopolnikov Vitalii Oleksandrovych
Автори російськоюТопольников Виталий Александрович
МПК / Мітки
Мітки: об'єкта, пристрій, визначення, дистанційного, орієнтації
Код посилання
<a href="https://ua.patents.su/4-87956-pristrijj-distancijjnogo-viznachennya-oriehntaci-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій дистанційного визначення орієнтації об’єкта</a>
Спосіб визначення кутової орієнтації об’єкта
Номер патенту: 36404
Опубліковано: 16.04.2001
Автори: Збруцький Олександр Васильович, Маринич Юрій Михайлович, Нестеренко Олег Іванович
МПК: G01C 19/00
Мітки: орієнтації, визначення, кутової, спосіб, об'єкта
Текст:
...і перпендикулярні головній осі гіроскопа, по кутам відхилення об'єкта відносно головної осі гіроскопа визначають кути і тангажу об'єкта, згідно з винаходом вводиться те, що додатково вимірюють управляючі моменти гіроскопа та визначають кут курсу за формулою: (19) UA (11) 36404 (13) A де K – кут к урсу об'єкта; M y1, M y 2 – управляючі моменти гіроскопа. 36404 K = arctg M y1 M y2 взаємоортогональних площинах у напрямку до...
Пристрій визначення орієнтації осі візира
Номер патенту: 30189
Опубліковано: 15.05.2003
Автори: Плита Олександр Андрійович, Черняк Сергій Іванович, Беляєва Галина Григорівна
МПК: G02B 23/00
Мітки: пристрій, визначення, орієнтації, візира, осі
Формула / Реферат:
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад на захисному шоломі оператора, складений із освітлювача, марки /сітки/, об'єктива і похилої плоскопаралельної пластини, який відрізняється тим, що в його склад введені блок виміру параметрів розвороту, блок задання початку відліку, блок корекції, блок нелінійних перетворень, блок множення, перший та другий суматори, пристрій поділу та блок...
Пристрій для визначення орієнтації осі візира
Номер патенту: 82768
Опубліковано: 12.05.2008
Автори: Ріділа Олександр Степанович, Плита Олександр Андрійович, Біляєва Галина Григорівна
МПК: G02B 23/02, G01B 11/26, F41G 3/22
Мітки: візира, осі, визначення, орієнтації, пристрій
Формула / Реферат:
Пристрій для визначення орієнтації осі візира, що містить блок реперних випромінювачів, в кількості не менше трьох, розміщений на захисному шоломі оператора, М оптико-локаційних блоків, де М>1, що містять скануючі дзеркальні призми і розміщені на нерухомій частині об'єкта, який відрізняється тим, що він містить блок обчислень, призначений для визначення кутів візування за попередньо обчисленими в ньому змінними складовими базової відстані...
Пристрій визначення орієнтації осі візира
Номер патенту: 30199
Опубліковано: 15.11.2000
Автори: Беляєва Галина Григорівна, Плита Олександр Андрійович, Черняк Сергій Іванович, Полєжаєв Віктор Вікторович
МПК: G02B 23/00
Мітки: осі, орієнтації, пристрій, візира, визначення
Формула / Реферат:
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву та нахиленої плоскопаралельної пластини, який відрізняється тим, що до нього введено блок вимірювання параметрів розвороту, блок завдання початку відліку, запам'ятовуючий пристрій, суматор та інтегратор, а до візиру додатково встановлено у фокальній поверхні...
Спосіб визначення кутів орієнтації лінії візування та пристрій для його здійснення
Номер патенту: 99021
Опубліковано: 10.07.2012
Автори: Кадочніков Сергій Михайлович, Черняк Сергій Іванович, Жук Володимир Леонідович, Плита Олександр Андрійович
МПК: F41G 3/22
Мітки: лінії, пристрій, здійснення, визначення, візування, кутів, орієнтації, спосіб
Формула / Реферат:
1. Спосіб визначення кутів орієнтації лінії візування нашоломною системою цілевказування і індикації, яка побудована на основі двох оптико-електронних скануючих блоків, електронного блока і нашоломного візирного пристрою з трьома випромінювачами I1, I2, І3, розміщеними на лицевому боці шолома у вигляді рівнобедреного, з основою I1I2, трикутника в площині I1I2І3, вектор нормалі до якої паралельний лінії візування, причому випромінювач I2...
Попередній патент: Паперовий стаканчик з подвійною стінкою
Наступний патент: Спосіб отримання олії з волоських горіхів
Випадковий патент: Прилад для ушивання органів