Спосіб визначення кутової орієнтації об’єкта
Номер патенту: 36404
Опубліковано: 16.04.2001
Автори: Нестеренко Олег Іванович, Збруцький Олександр Васильович, Маринич Юрій Михайлович

Текст
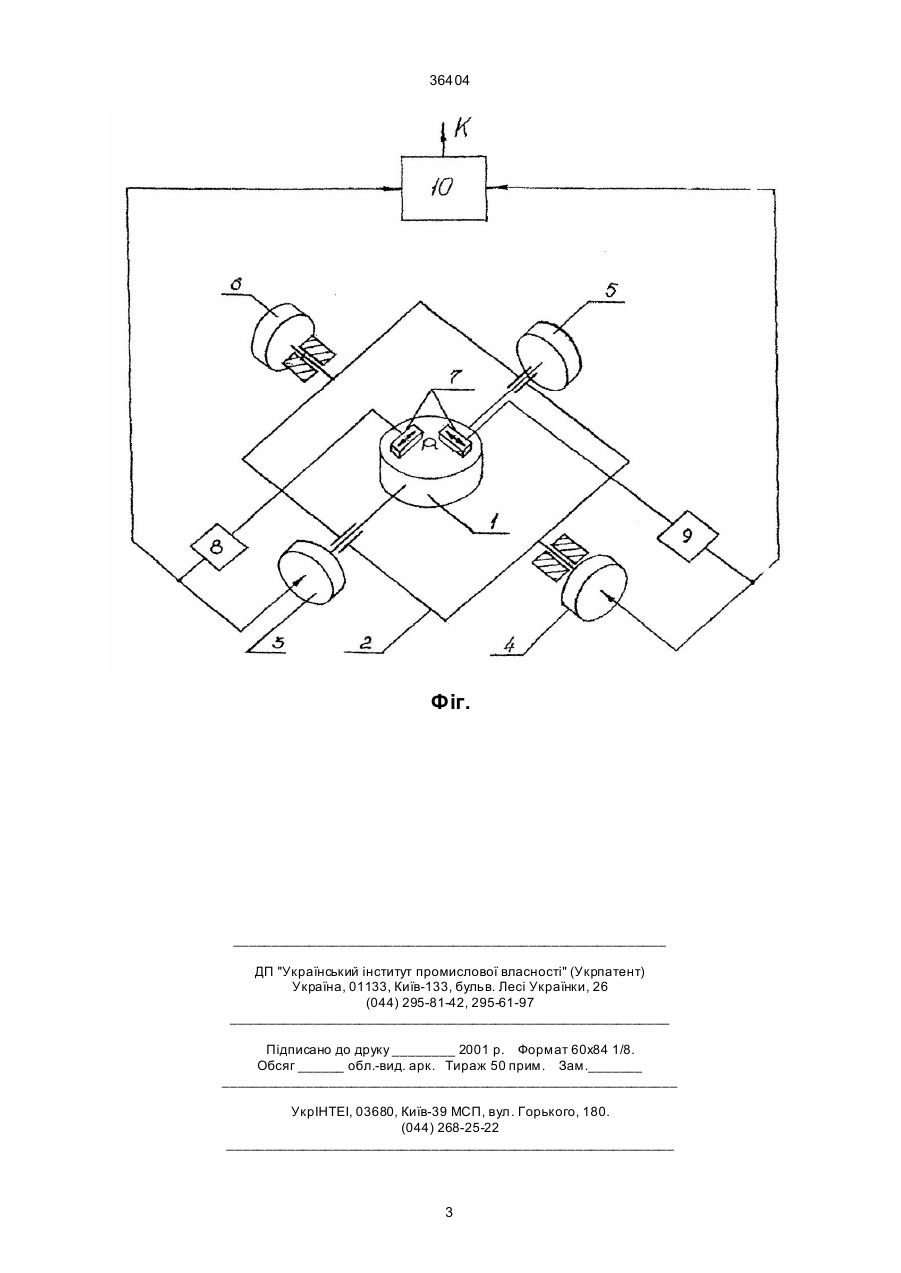
Спосіб визначення кутової орієнтації об'єкта, що включає встановлення головної осі гіроскопа в вертикальне положення, для чого на гіроскоп подають управляючі моменти, що формують в двох взаємоортогональних площина по сигналам індикаторів горизонту, осі чутливості яких лежать в цих площинах і перпендикулярні головній осі гіроскопа, визначення по кутам відхилення об'єкта відносно головної осі гіроскопа кутів крену і тангажу об'єкта, який відрізняється тим, що додатково вимірюють управляючі моменти гіроскопа та визначають кут курсу за формулою: M y1 K = arctg , M y2 Винахід відноситься до навігаційного приладобудування, а саме до гіроскопічних приладів. Відомий спосіб визначення кутової орієнтації об'єкта (Смирнов Е. Л., Яловенко А. В., Якушенков А. А. Те хнические средства судовождения. – М.: Транспорт, 1988), при якому платформа у тривісному кардановому підвісі стабілізується за сигналами двох тристепеневих гіроскопів – горизонтного та азимутального. Вісь обертання ротора горизонтного гіроскопа встановлюють в вертикальне положення шляхом створення управляючих моментів в дво х взаємоортогональних площинах по сигналам індикаторів горизонту, осі чутли вості яких лежать в цих площинах і перпендикулярні головній осі гіроскопа. Вісь обертання ротора азимутального гіроскопа утримують в площині платформи та площині меридіану за допомогою його датчиків моментів. З датчиків кута розміщених на осях карданового підвісу, знімають сигнали, які пропорційні трьом кутам (крену, тангажу і курсу), що повністю визначають просторову орієнтацію об'єкта. Перевагою такого способу є висока точність визначення кутів повної просторової орієнтації об'єкта. Недоліком цього способу є значна вартість приладу, перш за все, за рахунок використання двох гіроскопів, а також складної тривісної системи гіроскопічної стабілізації. За прототип прийнято спосіб визначення кутової орієнтації об'єкта за допомогою гіроскопічної вертикалі (Одинцов Л. А. Теория и расчёт гироско пических приборов. – К.: Вища школа, 1985), який полягає в тому, що головну вісь гіроскопа встановлюють в вертикальне положення, створюючи управляючі моменти в двох взаємоортогональних площинах по сигналам індикаторів горизонту, осі чутливості яких лежать в цих площинах перпендикулярні головній осі гіроскопа. По кутам відхилення об'єкта відносно головної осі гіроскопа визначають два куги просторової орієнтації об'єкта – крену і тангажу. Недоліком цього способу є неповне визначення кутової орієнтації об’єкта (відсутня інформація про його курс). В основу винаходу поставлено задачу вдосконалити спосіб визначення кутової орієнтації об’єкта шляхом додаткового визначення кута курсу об'єкта, що забезпечує можливість отримання інформації про повну кутову орієнтацію об'єкта. Поставлена задача вирішується тим, що в способі визначення кутової орієнтації об'єкта, який включається в тому, що головну вісь гіроскопа встановлюють в вертикальне положення, створюючи управляючі моменти в двох взаємоортогональних площинах по сигналам індикаторів горизонту осі чутливості яких лежать в цих площинах і перпендикулярні головній осі гіроскопа, по кутам відхилення об'єкта відносно головної осі гіроскопа визначають кути і тангажу об'єкта, згідно з винаходом вводиться те, що додатково вимірюють управляючі моменти гіроскопа та визначають кут курсу за формулою: (19) UA (11) 36404 (13) A де K – кут к урсу об'єкта; M y1, M y 2 – управляючі моменти гіроскопа. 36404 K = arctg M y1 M y2 взаємоортогональних площинах у напрямку до вертикального положення із швидкостями: M y1 M y2 wx = , wh = (2), H H де H - кінетичний момент гіроскопа. Таким чином, головна вісь гіроскопа постійно займає вертикальне положення, з датчиків кутів 5, 6, які розміщені на осях карданового підвісу, що зв'язує гіроскоп з корпусом об'єкту, знімають сигнали, пропорційні двом кутам орієнтації об'єкта відносно площини горизонту – крену і тангажу. Прецесуючи за допомогою датчиків моментів за напрямком вертикалі, головна вісь гіроскопа повертається в інерціальному просторі зі швидкістю, яка дорівнює швидкості повороту напрямку вертикалі внаслідок обертання Землі та руху об'єкта вздовж її сферичної поверхні, тобто із проекціями абсолютної кутової швидкості опорної системи координат: V wx = -U cos j sin K - , wh = U cosj cos K , (3), R де K – кут к урсу об'єкта; V - швидкість руху об'єкта; R - радіус Землі. Після вимірювання управляючих моментів (1) в контурі управління аналітичне визначають кут курсу об'єкта за формулою: M y1 K = arctg M y2 Таким чином, додаткове визначення кута курсу об'єкта дає можливість отримати інформацію про повну просторову орієнтацію об'єкта при менших витратах ніж у відомих способах. , де K – кут курсу об'єкта; M y1, M y 2 - управляючі моменти гіроскопа. На фіг. представлена принципова схема гіроскопічної вертикалі для реалізації способу. Гіроскопічна вертикаль побудована на основі тристепеневого гіроскопа і в кардановому підвісі, який містить кожух з ротором 1 і карданову рамку 2 з датчиками моментів 3, 4 і датчиками кутів 5, 6 розміщених на осях підвісу. На кожусі гіроскопу встановлюють два індикатори горизонту 7 із взаємоортогональними осями чутливості, які перпендикулярні головній осі гіроскопа, індикатори горизонту через регулятори 8, 9 керують датчиками моментів гіроскопа. Регулятори зв'язані з контуром управління 10, в якому вимірюють величини управляючих моментів і обчислюють кут курсу об'єкта. Спосіб здійснюється наступним чином. Індикатори горизонту 7 вимірюють кути відхилення головної осі гіроскопа від вертикального положення в двох взаємоортогональних площинах, за сигналами з індикаторів горизонту формують управляючі моменти: M y1 = c1a , M y 2 = c2 b ; (1), де c1 , c 2 – коефіцієнти передачі датчиків моментів гіроскопа, a , b – кути відхилення головної осі гіроскопа від площини горизонту. Моменти управління гіроскопом (1) через регулятори 8, 9 подають на датчики моментів гіроскопа 3, 4. Останні прикладають до гіроскопа моменти, що заставляють його прецесіювати в двох 2 36404 Фіг. _________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of angular orientation of object
Автори англійськоюZbrutskyi Oleksandr Vasyliovych, Marinych Yurii Mykhailovych, Nesterenko Oleh Ivanovych
Назва патенту російськоюСпособ определения угловой ориентации объекта
Автори російськоюЗбруцкий Александр Васильевич, Маринич Юрий Михайлович, Нестеренко Олег Иванович
МПК / Мітки
МПК: G01C 19/00
Мітки: кутової, орієнтації, спосіб, об'єкта, визначення
Код посилання
<a href="https://ua.patents.su/3-36404-sposib-viznachennya-kutovo-oriehntaci-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення кутової орієнтації об’єкта</a>
Спосіб визначення орієнтації осі свердловини

Номер патенту: 30032
Опубліковано: 15.11.2000
Автори: Гусєв Олексій Володимирович, Карпачов Юрій Андрійович, Анупрієнко Генадій Єфремович, Рудик Юрій Микитович
МПК: E21B 47/02, G01C 9/00, E21B 47/00
Мітки: орієнтації, спосіб, свердловини, визначення, осі
Формула / Реферат:
1. Спосіб визначення орієнтації осі свердловини, який містить операції вимірювання проекцій вектора сили тяжіння та проекцій вектора абсолютної кутової швидкості обертання Землі на ортогональні осі системи координат гіроскопічного інклінометра, розташованного в свердловині, який відрізняється тим, що на поверхні свердловини вибирають систему координат oxyz, де вісь oz спрямована по вертикалі Землі, а в площині yoz розташований вектор
Спосіб визначення орієнтації фібрил колагенових волокон остеонів кістки

Номер патенту: 31171
Опубліковано: 15.12.2000
Автори: Ушенко Юрій Олександрович, Круцяк Володимир Миколайович, Антонюк Ольга Петрівна, Григоришин Петро Михайлович, Ушенко Олександр Григорович, Пішак Василь Павлович
МПК: A61N 5/06
Мітки: орієнтації, колагенових, кістки, спосіб, визначення, фібрил, волокон, остеонів
Формула / Реферат:
Спосіб визначення орієнтації фібрил колагенових волокон остеонів кістки полягає у тому, що формують мікроскопічне зображення мікропрепарату кістки у схрещених поляризаторі та аналізаторі, візуально оцінюють орієнтацію фібрил колагенових волокон остеонів за напрямками освітлених ділянок у мікроскопічному поляризаційному зображенні мікропрепарату кістки який відрізняється тим, що використовують висококогерентне плоскополяризоване...
Спосіб визначення координат та орієнтації осі свердловини

Номер патенту: 31185
Опубліковано: 15.12.2000
Автори: Рудик Юрій Микитович, Карпачов Юрій Андрійович, Анупрієнко Генадій Єфремович
МПК: E21B 47/02, G01C 9/00
Мітки: осі, орієнтації, визначення, координат, свердловини, спосіб
Текст:
...: i i i (2 ) (2 ) j ic = - cosb ( 2 ) sina ( 2) i i i i (2 ) cos b ( 2 ) cos a ( 2 ) j i i i + (2 ) sinb ( 2 ) k i . i (4) + + Із виразу (4) отримуєм вираз для вектора (поворот нанавколо осі O iO i+ 1 : ( 2) ( 2) æ O iOi + 1 = R jic = ç - cos b ( 2 ) sin a ( 2 ) ii + i i è вісью O iz( 2 ) жорстко зв'язаною з возиком 2. i При цьому створюється система координат O ix( 2) y( 2 ) z( 2) (див. фіг. 2), де вісь Oi y( 2 ) направлеik ic ic ic ...
Спосіб визначення напрямку орієнтації оптичної осі оптично-анізотропних полярних одновісних кристалів
Номер патенту: 25657
Опубліковано: 30.10.1998
Автори: Пасічник Юрій Архипович, Мельничук Олександр Володимирович, Венгер Євген Федорович
МПК: G01N 21/17
Мітки: оптично-анізотропних, визначення, орієнтації, спосіб, одновісних, напрямку, оптично, полярних, осі, кристалів
Формула / Реферат:
Спосіб визначення напрямку орієнтації оптичної осі оптично-анізотропних полярних одновісних кристалів, який полягає в тому, що на плоску поверхню монокристала направляють пучок лінійно-поляризованого інфрачервоного випромінювання, реєструють коефіцієнт відбивання відбитого від плоскої поверхні випромінювання, який відрізняється тим, що направляють пучок випромінювання з області залишкових променів оптично-анізотропного одновісного полярного...
Пристрій визначення орієнтації осі візира
Номер патенту: 30199
Опубліковано: 15.11.2000
Автори: Беляєва Галина Григорівна, Черняк Сергій Іванович, Полєжаєв Віктор Вікторович, Плита Олександр Андрійович
МПК: G02B 23/00
Мітки: осі, орієнтації, визначення, візира, пристрій
Формула / Реферат:
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву та нахиленої плоскопаралельної пластини, який відрізняється тим, що до нього введено блок вимірювання параметрів розвороту, блок завдання початку відліку, запам'ятовуючий пристрій, суматор та інтегратор, а до візиру додатково встановлено у фокальній поверхні...
Попередній патент: Гідрофікований стіл для приводної станції струга
Наступний патент: Робочий орган роторного екскаватора
Випадковий патент: Спосіб поводження з муніципальними відходами