Збуджувач гвинтових коливань
Номер патенту: 9094
Опубліковано: 15.09.2005
Автори: Сердюк Леонід Іванович, Жигилій Сергій Михайлович, Костенко Павло Миколайович

Формула / Реферат
Збуджувач гвинтових коливань, що складається з корпуса та розміщених в ньому механізму керування та дебалансного вала з гвинтовими канавками, на якому закріплено один нерухомий дебаланс та два рухомих дебаланси, що з'єднані з валом кульовими шпонками; статичний момент кожного рухомого дебаланса дорівнює половині статичного моменту нерухомого, гвинтові канавки по обидві сторони від нерухомого дебаланса мають однаковий напрямок, довжину в 3/4 кроку гвинта та нахил до осі вала під кутом в інтервалі 20°-45°, який відрізняється тим, що рухомі дебаланси в початковий момент знаходяться в діаметрально протилежних до нерухомого та в найвіддаленіших від нього положеннях.
Текст
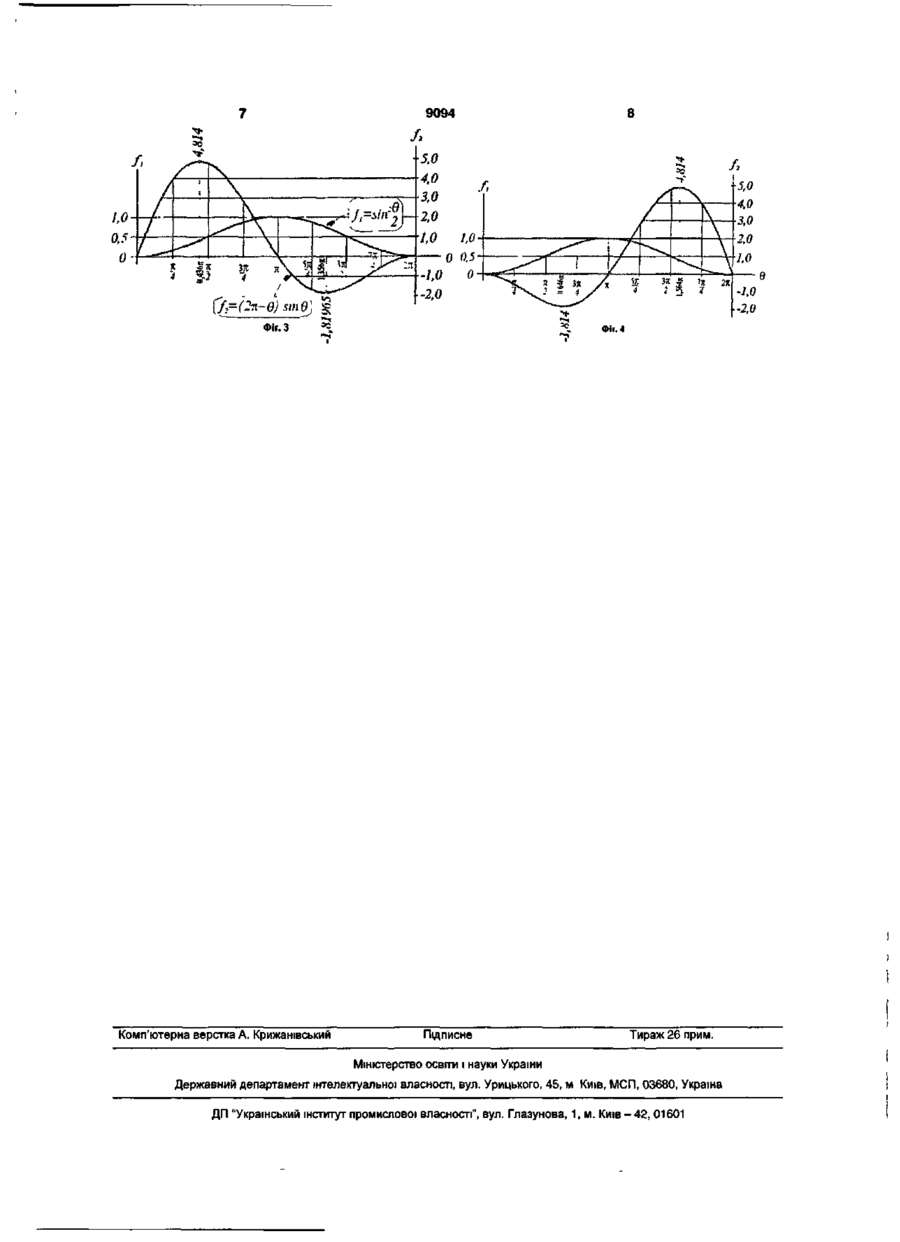
Збуджувач гвинтових коливань, що складається з корпуса та розміщених в ньому механізму керування та дебалансного вала з гвинтовими канавками, на якому закріплено один нерухомий ^5 9094 збуджувач гвинтових коливань, що складається з корпуса та розміщених в ньому механізму керування та дебалансного вала з гвинтовими канавками, на якому закріплено один нерухомий дебаланс та два рухомих дебаланси, що з'єднані з валом шаровими шпонками; статичний момент кожного рухомого дебаланса дорівнює половині статичного моменту нерухомого, причому рухомі дебаланси розміщені з різних сторін від нерухомого і знаходяться в початковий момент в діаметрально протилежному положенні до нерухомого, біля опірних підшипників дебалансного вала, а гвинтові канавки на кожній з двох ділянок вала мають один напрямок, довжину в 3/4 кроку гвинта, нахил до осі вала під кутом в інтервалі 20°-45°. Оскільки гвинтові канавки на обох ділянках вала мають однаковий напрямок, то під час переміщення рухомих дебалансів в протилежних напрямках вздовж дебалансного вала вони будуть повертатися відносно нерухомого дебаланса також в протилежних напрямках, а відцентрові сили інерції всіх дебалансів, що обертаються, будуть утворювати динамічний гвинт. Якщо гвинтові канавки на валі мають довжину в 3/4 кроку гвинта, то кожний рухомий дебаланс набуває можливості повертатися відносно нерухомого на кут від нуля до 270°, а це означає, що при досягненні кутом повороту значення 180° відбувається зміна динамічного гвинта з лівого на правий, або навпаки. Це дозволяє на ходу керувати як інтенсивністю вібраційного поля, так і його структурою. Якщо гвинтові канавки на дебалансному валі виконані під кутом 45° до осі вала, то довжина ділянки з гвинтовими канавками буде значно меншою ніж при куті нахилу у 20°. А це означає, що для зменшення загальної довжини дебалансного вала і зменшення габаритів всього віброзбуджувача, необхідно кут нахилу вибирати ближчим до 45°. У тих випадках, коли необхідно забезпечити більший головний момент (більше плече пари сил, що створюється рухомими дебалансами), необхідно кут нахилу вибирати ближчим до 20°. Оскільки в початковий момент у зрівноваженому стані рухомі дебаланси знаходяться в найвіддаленіших від нерухомого дебаланса положеннях (біля опірних підшипників), ТО ПІД час повороту рухомих дебалансів на кут до 90° значення головного моменту буде змінюватись в більш широкому діапазоні, ніж у випадку, коли ці дебаланси в початковий момент у зрівноваженому стані знаходяться біля нерухомого дебаланса, як це має місце в технічному вирішенні [2]. На Фіг.1 подано загальний вигляд керованого віброзбуджувача гвинтових коливань. На Фіг.2 наведено кінематичну схему, що ілюструє динамічний гвинт відцентрових сил інерції дебалансів, що обертаються разом з дебалансним валом, та зміну напрямку динамічного гвинта при зміні кута повороту рухомих дебалансів відносно свого початкового положення, що відповідає зрівноваженому стану збуджувача коливань. На Фіг.З зображені графіки зміни головного вектора Ф та головного моменту М о сил інерції дебалансів залежно від кута 0 повороту рухомих дебалансів від свого початкового найвіддаленішого від нерухомого деба ланса положення. На Фіг.4 зображені такі ж графіки зміни головного вектора Ф і головного моменту Мо сил інерції дебалансів залежно від кута 0 повороту рухомих дебалансів від свого початкового положення поруч з нерухомим дебалансом. Віброзбуджувач складається з корпуса 1, в якому встановлено дебалансний вал 2 з одним нерухомим відносно вала дебалансом 3 та двома рухомими дебалансами 4, що можуть переміщуватись вздовж вала й одночасно повертатися відносно вала. Рухомі дебаланси розміщені з обох боків від нерухомого і в початковий момент розташовані в діаметрально протилежних відносно нерухомого дебаланса та в найвіддаленіших від нього положеннях (біля опірних підшипників). Статичний момент маси кожного рухомого дебаланса 4 дорівнює половині статичного моменту нерухомого дебаланса 3. Кожен рухомий дебаланс 4 пов'язаний з дебалансним валом 2 за допомогою пари шарових шпонок 6, які симетрично розміщені в напівсферичних гніздах рухомого дебаланса та в гвинтових канавках 5 на валі. При необхідності шарові шпонки мають можливість перекочуватися по гвинтових канавках, котрі мають однаковий крок і однаковий напрямок на кожній частині дебалансного вала. За допомогою підшипників 7 рухомі дебаланси з'єднані з вилками 8, котрі через різьбові втулки 9 взаємодіють з ходовим гвинтом 10, на одній ділянці якого виконана права різьба, а на іншій - ліва. Двигун-редуктор 11, ходовий гвинт 10, різьбові втулки 9 та вилки 8 складають механізм керування рухомими дебалансами. Гвинтові канавки 5 на валі 2 починаються від опірних підшипників, мають довжину, що відповідає % кроку гвинта і кут нахилу до осі вала в межах 20°-45°. За рахунок цього рухомі дебаланси можуть переміщуватись зі свого початкового положення до нерухомого дебаланса з обох сторін і одночасно повертатись відносно вала на кут 0 до 270°. Працює керований віброзбуджувач гвинтових коливань наступним чином. У момент пуску приводного двигуна рухомі дебаланси 4 займають початкові найвіддаленіші від нерухомого дебаланса 3 та діаметрально протилежні до нього положення, що відповідають значенням кутів =0. Рухомі частини віброзбуджувача в такому положенні динамічно зрівноважені. Після виходу приводного двигуна в сталий режим відбувається керування рухомими дебалансами: двигун-редуктор 11 обертає ходовий гвинт 10, що викликає переміщення різьбових втулок 9 разом з вилками 8 у протилежних напрямках назустріч одних до інших і до нерухомого дебаланса 3. За допомогою підшипників 7, що закріплені внутрішніми обоймами на маточинах рухомих дебалансів 4, вилки 8 переміщують рухомі дебаланси 4 вздовж вала 2 до нерухомого дебаланса 3. Шарові шпонки 6 котяться по гвинтових канавках 5 однакового напрямку та змушують рухомі дебаланси 4 повертатись в протилежних напрямках на кут 0 відносно початкового (зрівноваженого) положення. Відцентрові сили нерухомого та рухомого дебалансів утворюють динамічний (силовий) гвинт, який при досягненні кута 0 значення =480° змінює свій знак на протилежний. Зміна кута 0 від 90° до 270° і навпаки, визначає нестаціонарний режим гвинто 9094 вих коливань зі зміною не лише інтенсивності коливань, але і структури вібраційного поля, що суттєво підвищує ефективність вібраційної дії на оброблюване середовище Перевага пропонованого технічного вирішення перед відомим [2] полягає в тому, що сповна використовуються динамічні можливості віброзбуджувача гвинтових коливань без збільшення його габаритів і без доповнення будь-якими новими конструкційними вузлами Відомо, що головний вектор сил інерції такого віброзбуджувача визначається за формулою 9 о0 Ф = 2тесо sin —, а головний момент цих сил 2 буде визначатись залежніср h тю Mo = m e w — ( 2 л - 0 ) sin 0 , де m - маса кожного 2тс рухомого дебаланса, є - ексцентриситет дебалансів, h - крок гвинтової канавки на дебалансному валі, - кутова швидкість обертання дебалансного вала На Фіг 3 наведені графіки зміни функцій f-| =sin — - та = (2л-6) sin 9, котрі показують, як змінюються Ф та Мо залежно від кута 9 при постійних m, e, h і 3 цих графіків видно, що функція fi симетрична Вона збільшується на відрізку 0 < 9 < і зменшується на відрізку < ^ А це означає, що головний вектор Ф змінюється за одним і тим же законом незалежно від того, де розміщені рухомі дебаланси в початковому зрівноваженому положенні (біля нерухомого дебаланса чи у найвіддаленіших від нього положеннях) Функція f2 має зовсім інший характер Вона збільшується на відрізу 0 < 9 < — , досягає локального максимуму 4,814 при 9=0,436 доприводачо двигуна і зменшується до нуля на відрізку — < 0 < л;, потім знову зростає на відрізку 7 С < 9 < — , досягає локального мінімуму 1,81965 при 9=1,356 і зменшується до нуля на відрізку — < 9 < 27і Це означає, що залежно від того, де знаходяться рухомі дебаланси в початковому положенні, головний момент буде змінюватись за різними законами Графіки функцій h та f2 показують динамічні можливості віброзбуджувача гвинтових коливань, які необхідно враховувати під час його конструювання та можна використовувати під час експлуатації У відомому вирішенні [2], коли рухомі дебаланси в початковому положенні знаходились поруч з нерухомим дебалансом, можливості віброзбуджувача визначалися ділянкою О
ДивитисяДодаткова інформація
Назва патенту англійськоюExciter of helical oscillations
Автори англійськоюSerdiuk Leonid Ivanovych
Назва патенту російськоюВозбудитель винтовых колебаний
Автори російськоюСердюк Леонид Иванович
МПК / Мітки
МПК: B06B 1/10
Мітки: збуджувач, гвинтових, коливань
Код посилання
<a href="https://ua.patents.su/4-9094-zbudzhuvach-gvintovikh-kolivan.html" target="_blank" rel="follow" title="База патентів України">Збуджувач гвинтових коливань</a>
Керований віброзбуджувач гвинтових коливань
Номер патенту: 40341
Опубліковано: 15.07.2004
Автори: Костенко Микола Іванович, Давиденко Юрій Олександрович, Сердюк Леонід Іванович, Осіна Людмила Михайлівна
МПК: B06B 1/10
Мітки: керований, коливань, гвинтових, віброзбуджувач
Формула / Реферат:
Керований віброзбуджувач гвинтових коливань, який складається з корпуса, розміщеного в ньому механізму керування та дебалансного вала, на якому закріплено один нерухомий дебаланс та два рухомих дебаланси, з'єднаних з валом шаровими шпонками, що виконані з можливістю контактування з гвинтовими канавками, які виконані на ділянках згаданого вала, розташованих по обидва боки від нерухомого дебаланса, причому статичний момент кожного рухомого...
Вібросито
Номер патенту: 70256
Опубліковано: 15.09.2004
Автори: Шахов Олександр Миколайович, Шажко Віта Сергіївна, Шахов Сергій Олександрович
МПК: B07B 1/28
Мітки: вібросито
Формула / Реферат:
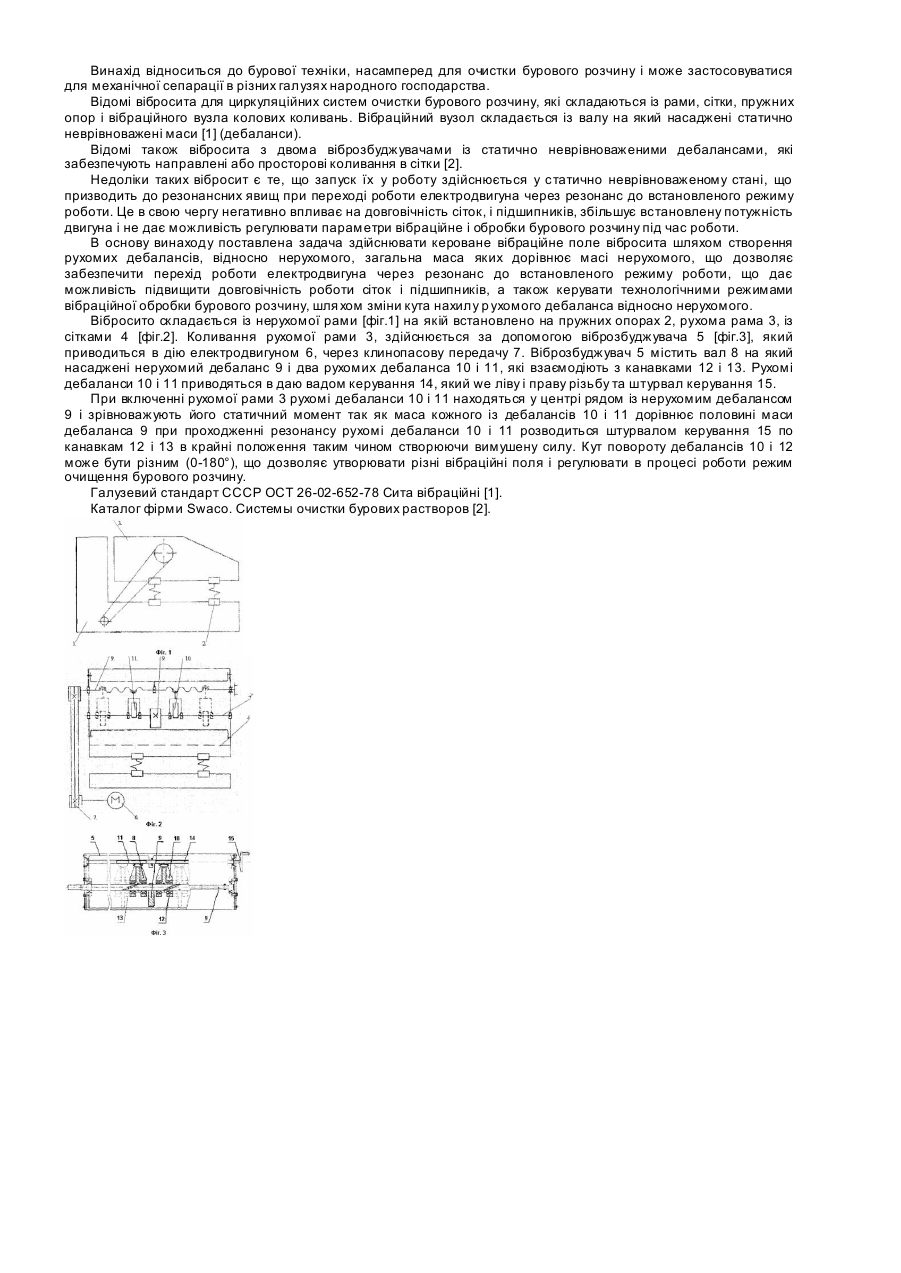
1. Вібросито, яке складається із рам, рухомої і нерухомої, пружних опор і віброзбуджувача, яке відрізняється тим, що віброзбуджувач містить один нерухомий дебаланс і два рухомих, які взаємодіють з валом віброзбуджувача і системою керування.2. Вібросито за п. 1, яке відрізняється тим, що маса кожного дебаланса дорівнює половині масі нерухомого.
Гучномовець та електродинамічний інерційний збуджувач коливань для нього
Номер патенту: 42881
Опубліковано: 15.11.2001
Автори: Ейзіма Генрі, Джарвіс Едвард, Робертс Мартін
МПК: H04R 9/00
Мітки: нього, інерційний, електродинамічний, коливань, гучномовець, збуджувач
Формула / Реферат:
1. Електродинамічний інерційний збуджувач коливань (1) для збудження елемента (2), що має здатність підтримувати і передавати вхідну коливальну енергію, який включає в себе вузол (3, 4) моторної котушки, що має обмотку (3), жорстко приєднану до трубчастого каркасного елемента (4) котушки, магнітний вузол (5, 6, 7), що розташований концентрично відносно вузла моторної котушки, підвісковий засіб (11), що ним підвішений магнітний вузол з...
Валець вібраційного дорожнього котка
Номер патенту: 1699
Опубліковано: 17.03.2003
Автори: Шутман Марат Іосіфавіч, Канашеускі Ляксандр Георгіевіч, Халопік Дзмітрий Мікалаявіч
МПК: E02D 3/074, E01C 19/22, B06B 1/10
Мітки: дорожнього, вібраційного, котка, валець
Формула / Реферат:
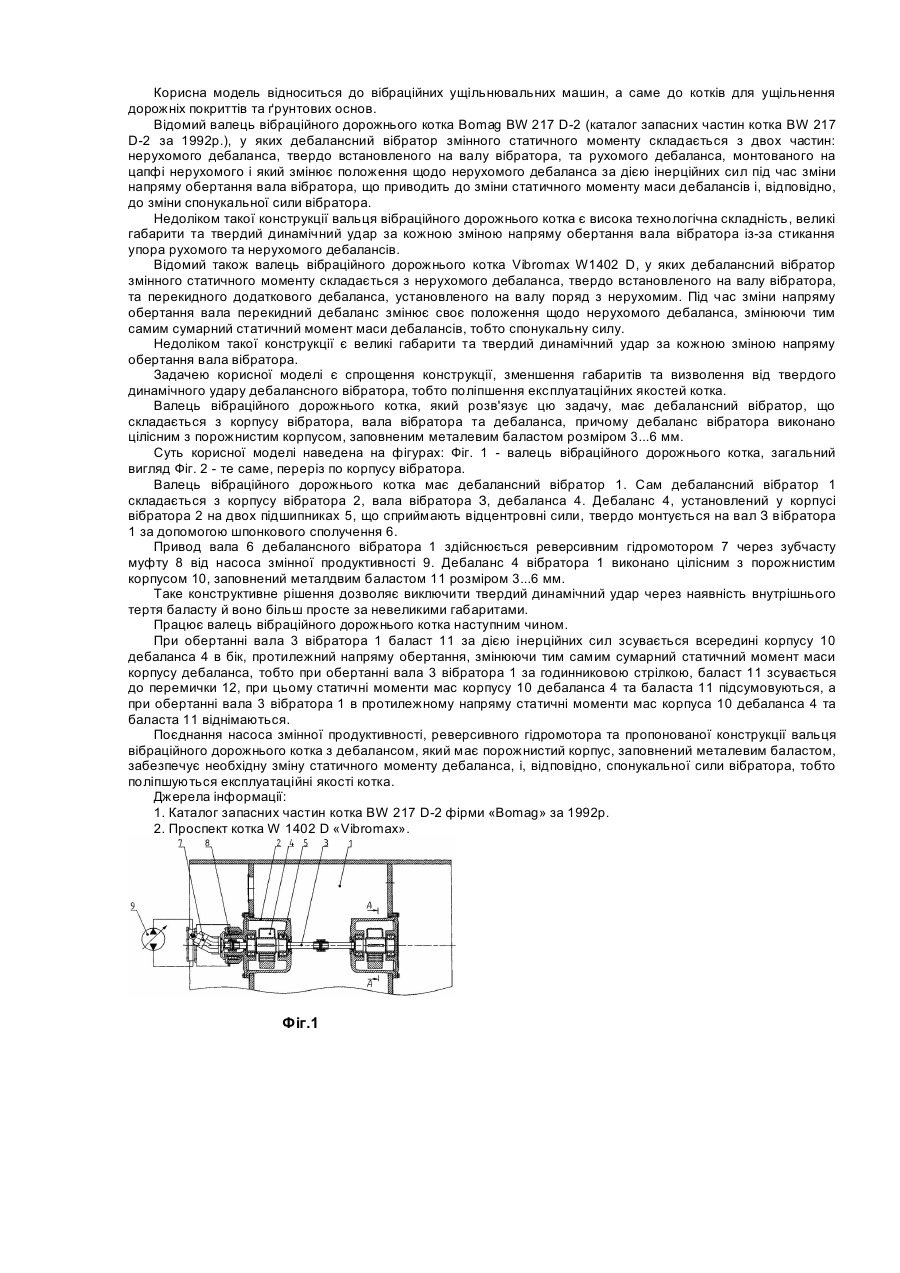
Валець вібраційного дорожнього котка, що має дебалансний вібратор, який складається з корпусу вібратора, вала вібратора та дебаланса, який відрізняється тим, що дебаланс вібратора виконано цілісним з порожнистим корпусом, заповненим металевим баластом розміром 3-6 мм.
Вібратор зі змінним статичним моментом
Номер патенту: 39323
Опубліковано: 15.06.2001
Автори: Олехнович Каземір Олександрович, Яресько Віктор Іванович
МПК: B28B 1/08
Мітки: вібратор, моментом, статичним, змінним
Формула / Реферат:
1. Вібратор зі змінним статичним моментом має дебалансний вал, рухомий дебаланс і гвинтові пружини, який відрізняється тим, що додатково на валу закріплений нерухомий дебаланс таврової форми з постійним статичним моментом, до якого за допомогою гребне-пазового з’єднання опозитно приєднаний рухомий дебаланс підково образної форми, який має гвинтові пружини, які розміщені з двох боків дебалансів, кінці яких закріплені на обох дебалансах,...
Попередній патент: Спосіб виготовлення термочутливої муфти із сплаву з ефектом пам’яті форми
Наступний патент: Пристрій для безшовного з’єднання ушкоджених нервів при будь-якій відстані між їх куксами за о.о.нахабою
Випадковий патент: Біодобриво