Спосіб керування індукційним розпресовуванням деталей
Номер патенту: 92547
Опубліковано: 10.11.2010
Автори: Півняк Геннадій Григорович, Дрешпак Наталія Станіславівна
Формула / Реферат
Спосіб керування індукційним розпресовуванням однотипних циліндричних деталей, який включає зміну в процесі нагрівання деталі частоти слідування імпульсів струму синусоїдальної форми, що протікає в індукторі, який відрізняється тим, що попередньо визначають і задають максимальне значення частоти слідування згаданих імпульсів струму, яке відповідає такій потужності нагрівання деталі, яка перевищує мінімальне значення потужності, необхідної для розпресування деталей, а також температуру зовнішньої поверхні деталі, що нагрівають, при якій забезпечується розпресування деталей, і далі здійснюють нагрівання деталі до заданого значення температури її зовнішньої поверхні при незмінній частоті слідування імпульсів струму, рівній заданому максимальному значенню, потім частоту слідування імпульсів струму знижують, стабілізуючи температуру зовнішньої поверхні деталі на заданому рівні аж до завершення процесу розпресовування.
Текст
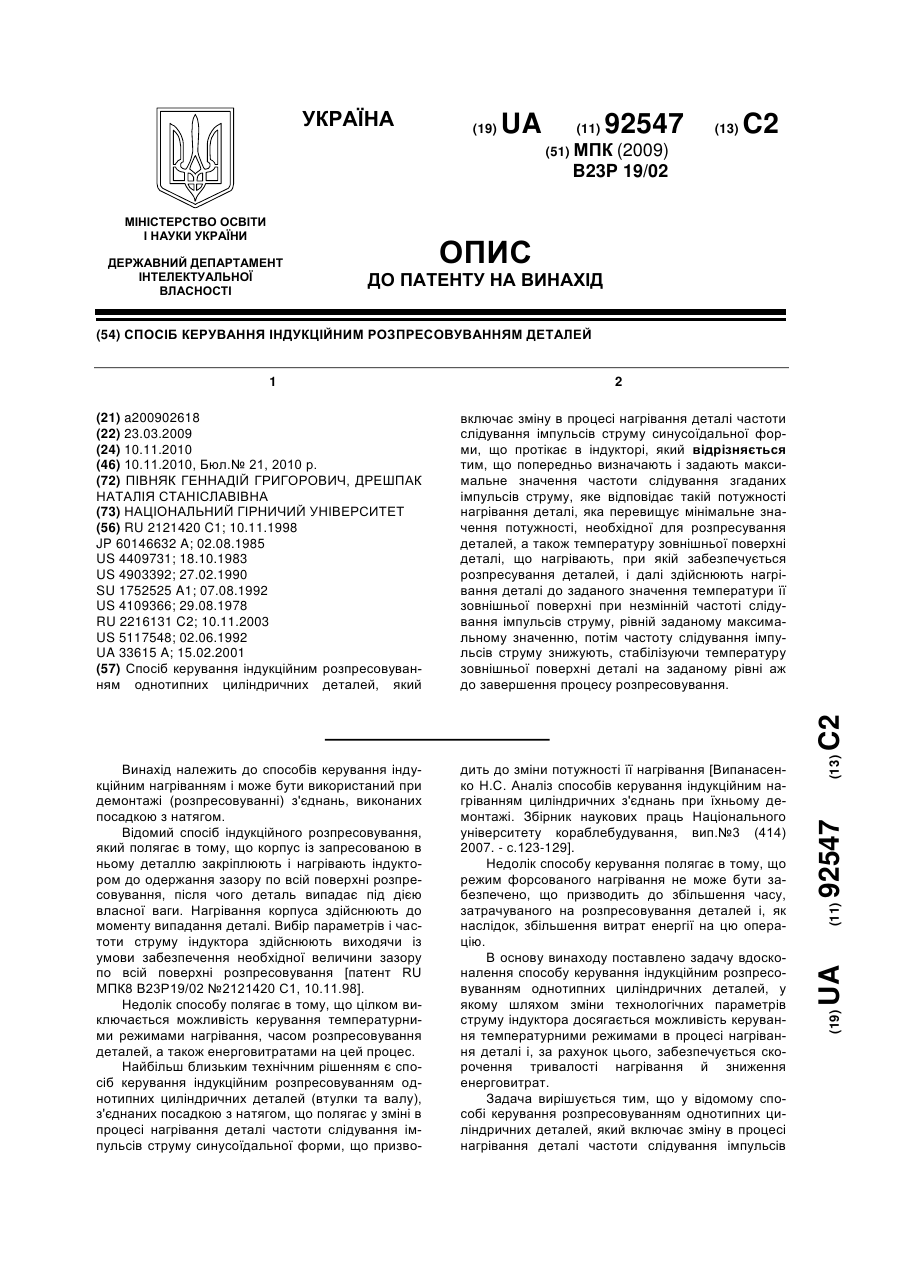
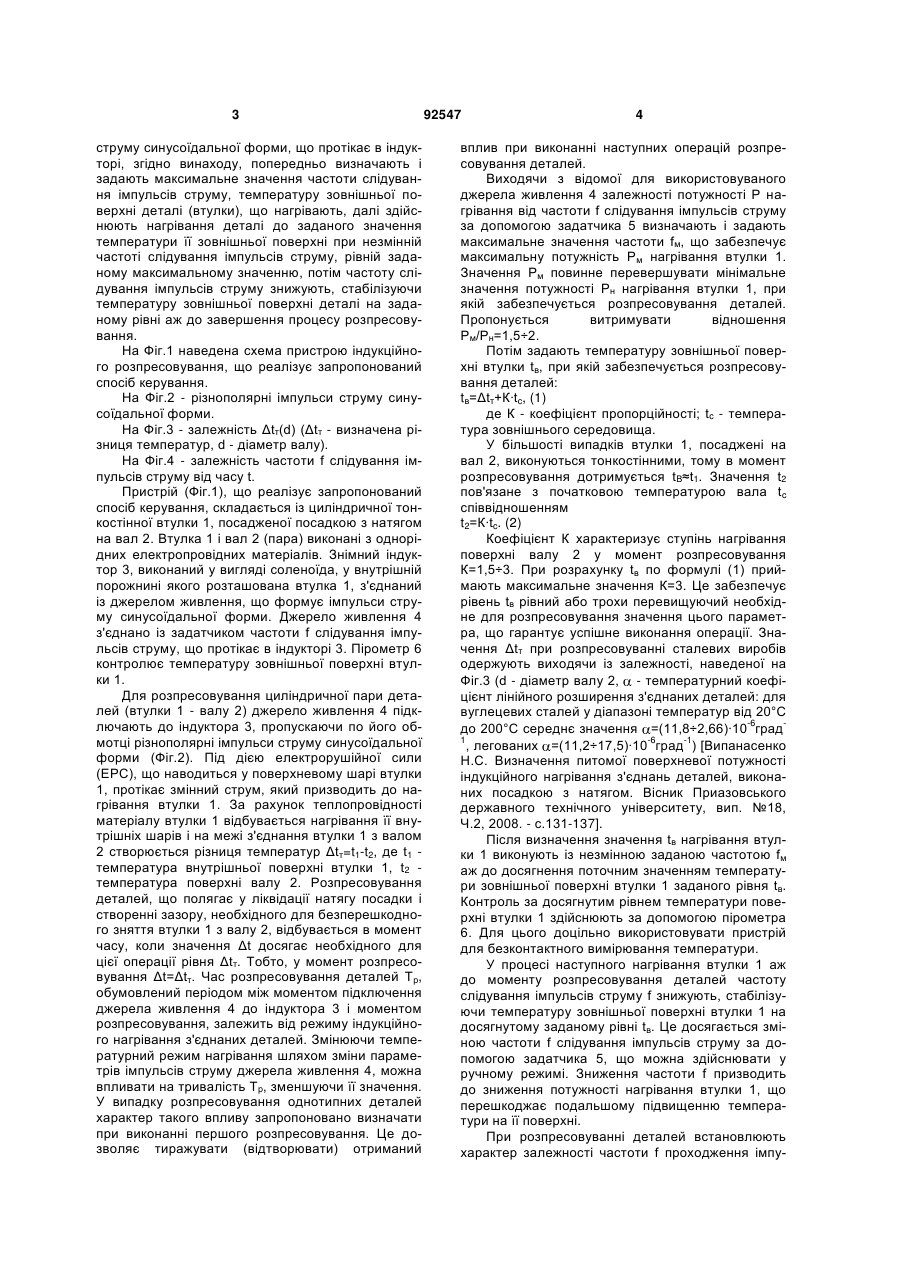
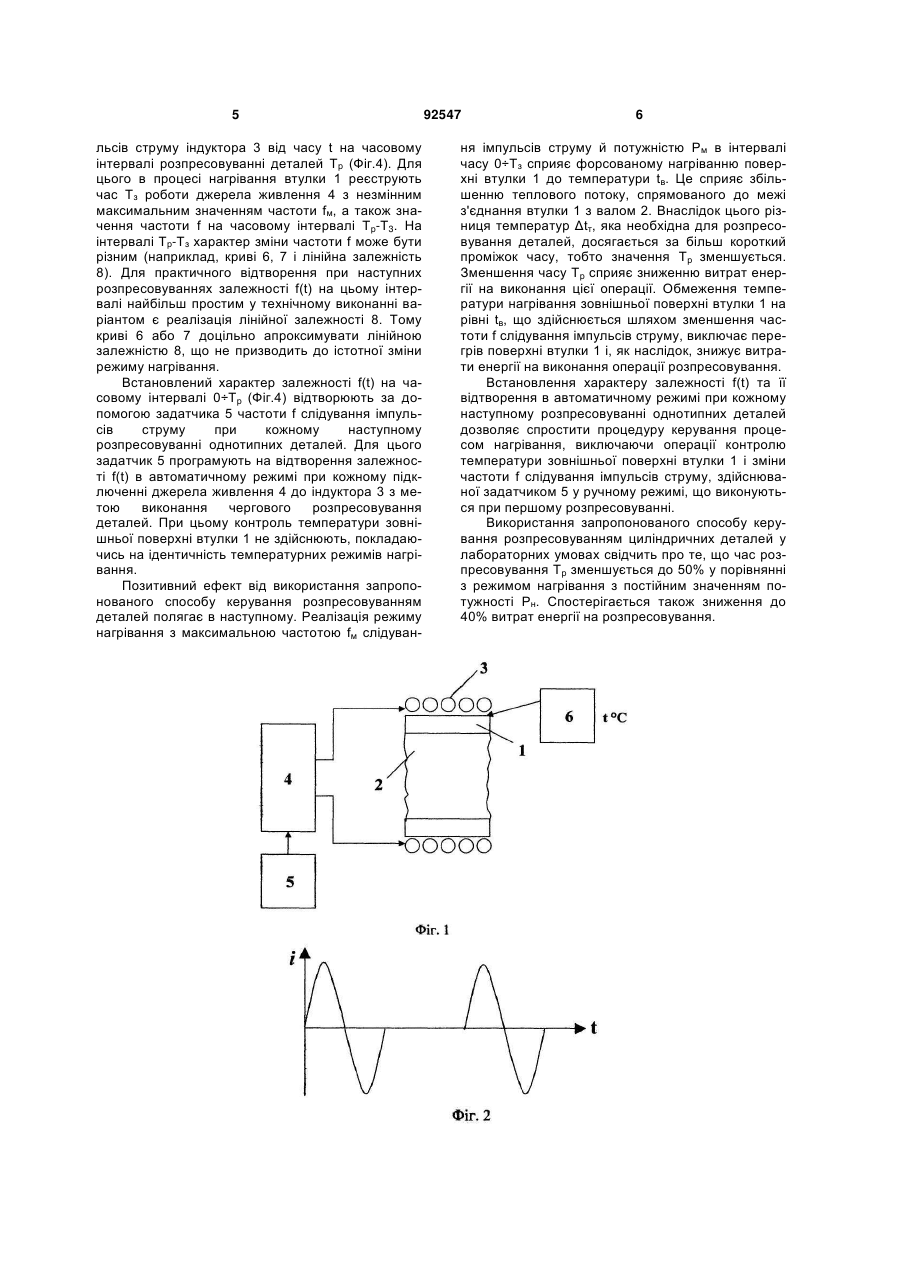
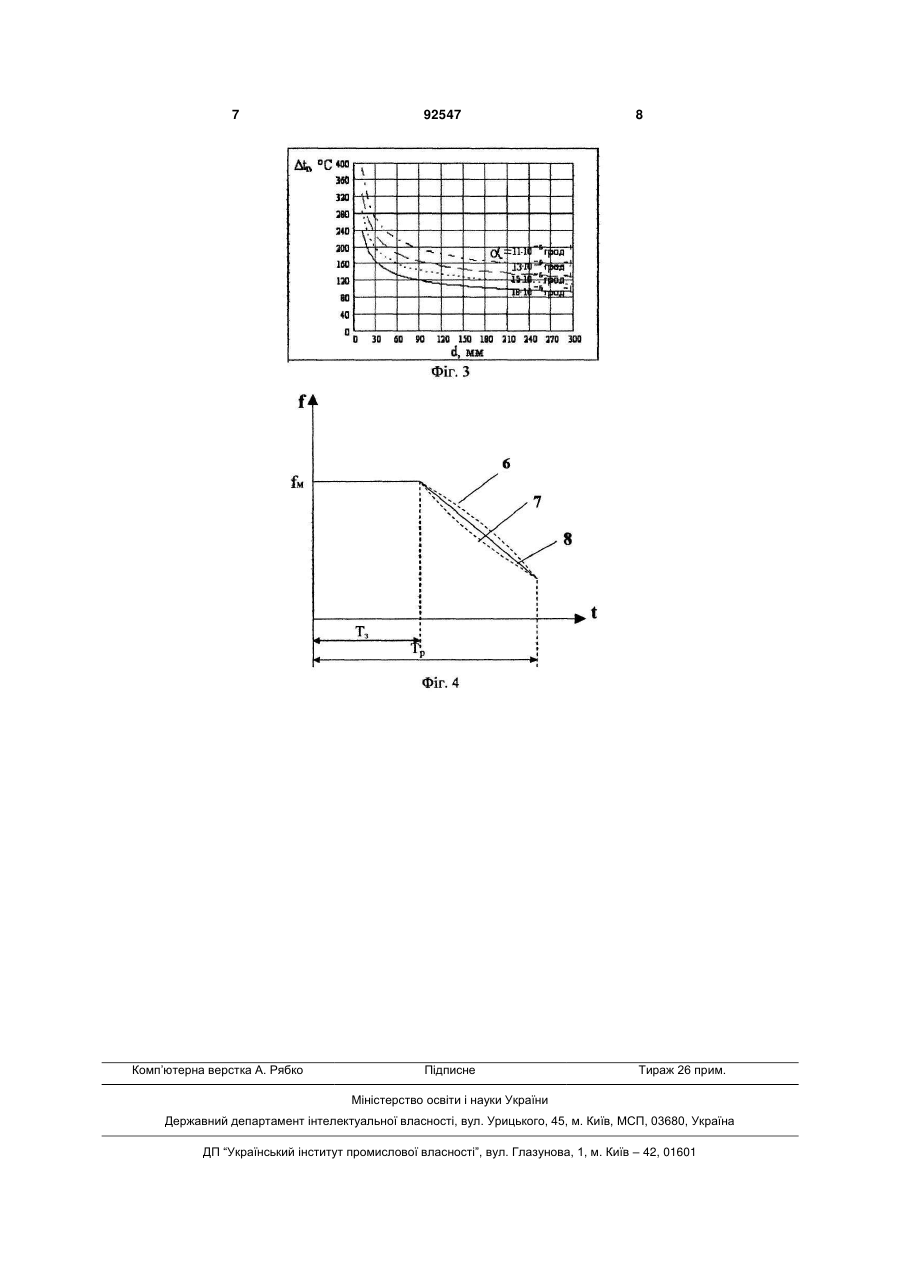
Спосіб керування індукційним розпресовуванням однотипних циліндричних деталей, який 3 струму синусоїдальної форми, що протікає в індукторі, згідно винаходу, попередньо визначають і задають максимальне значення частоти слідування імпульсів струму, температуру зовнішньої поверхні деталі (втулки), що нагрівають, далі здійснюють нагрівання деталі до заданого значення температури її зовнішньої поверхні при незмінній частоті слідування імпульсів струму, рівній заданому максимальному значенню, потім частоту слідування імпульсів струму знижують, стабілізуючи температуру зовнішньої поверхні деталі на заданому рівні аж до завершення процесу розпресовування. На Фіг.1 наведена схема пристрою індукційного розпресовування, що реалізує запропонований спосіб керування. На Фіг.2 - різнополярні імпульси струму синусоїдальної форми. На Фіг.3 - залежність Δtт(d) (Δtт - визначена різниця температур, d - діаметр валу). На Фіг.4 - залежність частоти f слідування імпульсів струму від часу t. Пристрій (Фіг.1), що реалізує запропонований спосіб керування, складається із циліндричної тонкостінної втулки 1, посадженої посадкою з натягом на вал 2. Втулка 1 і вал 2 (пара) виконані з однорідних електропровідних матеріалів. Знімний індуктор 3, виконаний у вигляді соленоїда, у внутрішній порожнині якого розташована втулка 1, з'єднаний із джерелом живлення, що формує імпульси струму синусоїдальної форми. Джерело живлення 4 з'єднано із задатчиком частоти f слідування імпульсів струму, що протікає в індукторі 3. Пірометр 6 контролює температуру зовнішньої поверхні втулки 1. Для розпресовування циліндричної пари деталей (втулки 1 - валу 2) джерело живлення 4 підключають до індуктора 3, пропускаючи по його обмотці різнополярні імпульси струму синусоїдальної форми (Фіг.2). Під дією електрорушійної сили (ЕРС), що наводиться у поверхневому шарі втулки 1, протікає змінний струм, який призводить до нагрівання втулки 1. За рахунок теплопровідності матеріалу втулки 1 відбувається нагрівання її внутрішніх шарів і на межі з'єднання втулки 1 з валом 2 створюється різниця температур Δtт=t1-t2, де t1 температура внутрішньої поверхні втулки 1, t2 температура поверхні валу 2. Розпресовування деталей, що полягає у ліквідації натягу посадки і створенні зазору, необхідного для безперешкодного зняття втулки 1 з валу 2, відбувається в момент часу, коли значення Δt досягає необхідного для цієї операції рівня Δtт. Тобто, у момент розпресовування Δt=Δtт. Час розпресовування деталей Тр, обумовлений періодом між моментом підключення джерела живлення 4 до індуктора 3 і моментом розпресовування, залежить від режиму індукційного нагрівання з'єднаних деталей. Змінюючи температурний режим нагрівання шляхом зміни параметрів імпульсів струму джерела живлення 4, можна впливати на тривалість Тр, зменшуючи її значення. У випадку розпресовування однотипних деталей характер такого впливу запропоновано визначати при виконанні першого розпресовування. Це дозволяє тиражувати (відтворювати) отриманий 92547 4 вплив при виконанні наступних операцій розпресовування деталей. Виходячи з відомої для використовуваного джерела живлення 4 залежності потужності Ρ нагрівання від частоти f слідування імпульсів струму за допомогою задатчика 5 визначають і задають максимальне значення частоти fм, що забезпечує максимальну потужність Рм нагрівання втулки 1. Значення Рм повинне перевершувати мінімальне значення потужності Рн нагрівання втулки 1, при якій забезпечується розпресовування деталей. Пропонується витримувати відношення Рм/Рн=1,5÷2. Потім задають температуру зовнішньої поверхні втулки tв, при якій забезпечується розпресовування деталей: tв=Δtт+К·tc, (1) де К - коефіцієнт пропорційності; tc - температура зовнішнього середовища. У більшості випадків втулки 1, посаджені на вал 2, виконуються тонкостінними, тому в момент розпресовування дотримується tB≈t1. Значення t2 пов'язане з початковою температурою вала tc співвідношенням t2=К·tc. (2) Коефіцієнт К характеризує ступінь нагрівання поверхні валу 2 у момент розпресовування К=1,5÷3. При розрахунку tв по формулі (1) приймають максимальне значення К=3. Це забезпечує рівень tв рівний або трохи перевищуючий необхідне для розпресовування значення цього параметра, що гарантує успішне виконання операції. Значення Δtт при розпресовуванні сталевих виробів одержують виходячи із залежності, наведеної на Фіг.3 (d - діаметр валу 2, - температурний коефіцієнт лінійного розширення з'єднаних деталей: для вуглецевих сталей у діапазоні температур від 20°С до 200°С середнє значення =(11,8÷2,66)·10-6град1 , легованих =(11,2÷17,5)·10-6град-1) [Випанасенко Н.С. Визначення питомої поверхневої потужності індукційного нагрівання з'єднань деталей, виконаних посадкою з натягом. Вісник Приазовського державного технічного університету, вип. №18, Ч.2, 2008. - с.131-137]. Після визначення значення tв нагрівання втулки 1 виконують із незмінною заданою частотою fм аж до досягнення поточним значенням температури зовнішньої поверхні втулки 1 заданого рівня tв. Контроль за досягнутим рівнем температури поверхні втулки 1 здійснюють за допомогою пірометра 6. Для цього доцільно використовувати пристрій для безконтактного вимірювання температури. У процесі наступного нагрівання втулки 1 аж до моменту розпресовування деталей частоту слідування імпульсів струму f знижують, стабілізуючи температуру зовнішньої поверхні втулки 1 на досягнутому заданому рівні tв. Це досягається зміною частоти f слідування імпульсів струму за допомогою задатчика 5, що можна здійснювати у ручному режимі. Зниження частоти f призводить до зниження потужності нагрівання втулки 1, що перешкоджає подальшому підвищенню температури на її поверхні. При розпресовуванні деталей встановлюють характер залежності частоти f проходження імпу 5 льсів струму індуктора 3 від часу t на часовому інтервалі розпресовуванні деталей Тр (Фіг.4). Для цього в процесі нагрівання втулки 1 реєструють час Тз роботи джерела живлення 4 з незмінним максимальним значенням частоти fм, а також значення частоти f на часовому інтервалі Тр-Т3. На інтервалі Тр-Тз характер зміни частоти f може бути різним (наприклад, криві 6, 7 і лінійна залежність 8). Для практичного відтворення при наступних розпресовуваннях залежності f(t) на цьому інтервалі найбільш простим у технічному виконанні варіантом є реалізація лінійної залежності 8. Тому криві 6 або 7 доцільно апроксимувати лінійною залежністю 8, що не призводить до істотної зміни режиму нагрівання. Встановлений характер залежності f(t) на часовому інтервалі 0÷Тр (Фіг.4) відтворюють за допомогою задатчика 5 частоти f слідування імпульсів струму при кожному наступному розпресовуванні однотипних деталей. Для цього задатчик 5 програмують на відтворення залежності f(t) в автоматичному режимі при кожному підключенні джерела живлення 4 до індуктора 3 з метою виконання чергового розпресовування деталей. При цьому контроль температури зовнішньої поверхні втулки 1 не здійснюють, покладаючись на ідентичність температурних режимів нагрівання. Позитивний ефект від використання запропонованого способу керування розпресовуванням деталей полягає в наступному. Реалізація режиму нагрівання з максимальною частотою fм слідуван 92547 6 ня імпульсів струму й потужністю Рм в інтервалі часу 0÷Тз сприяє форсованому нагріванню поверхні втулки 1 до температури tв. Це сприяє збільшенню теплового потоку, спрямованого до межі з'єднання втулки 1 з валом 2. Внаслідок цього різниця температур Δtт, яка необхідна для розпресовування деталей, досягається за більш короткий проміжок часу, тобто значення Тр зменшується. Зменшення часу Тр сприяє зниженню витрат енергії на виконання цієї операції. Обмеження температури нагрівання зовнішньої поверхні втулки 1 на рівні tв, що здійснюється шляхом зменшення частоти f слідування імпульсів струму, виключає перегрів поверхні втулки 1 і, як наслідок, знижує витрати енергії на виконання операції розпресовування. Встановлення характеру залежності f(t) та її відтворення в автоматичному режимі при кожному наступному розпресовуванні однотипних деталей дозволяє спростити процедуру керування процесом нагрівання, виключаючи операції контролю температури зовнішньої поверхні втулки 1 і зміни частоти f слідування імпульсів струму, здійснюваної задатчиком 5 у ручному режимі, що виконуються при першому розпресовуванні. Використання запропонованого способу керування розпресовуванням циліндричних деталей у лабораторних умовах свідчить про те, що час розпресовування Тр зменшується до 50% у порівнянні з режимом нагрівання з постійним значенням потужності Рн. Спостерігається також зниження до 40% витрат енергії на розпресовування. 7 Комп’ютерна верстка А. Рябко 92547 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of induction pressing out parts
Автори англійськоюPivniak Hennadii Hryhorovych, Dreshpak Natalia Stanislavivna
Назва патенту російськоюСпособ управления индукционной распрессовкой деталей
Автори російськоюПивняк Геннадий Григорьевич, Дрешпак Наталья Станиславовна
МПК / Мітки
МПК: B23P 19/02
Мітки: розпресовуванням, спосіб, індукційним, деталей, керування
Код посилання
<a href="https://ua.patents.su/4-92547-sposib-keruvannya-indukcijjnim-rozpresovuvannyam-detalejj.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування індукційним розпресовуванням деталей</a>
Спосіб керування індукційним розпресовуванням деталей

Номер патенту: 43339
Опубліковано: 10.08.2009
Автори: Півняк Геннадій Григорович, Дрешпак Наталія Станіславівна
МПК: B23P 19/02
Мітки: розпресовуванням, спосіб, керування, індукційним, деталей
Формула / Реферат:
Спосіб керування індукційним розпресовуванням однотипних циліндричних деталей, який включає зміну в процесі нагрівання деталі частоти слідування імпульсів струму синусоїдальної форми, що протікає в індукторі, який відрізняється тим, що попередньо визначають і задають максимальне значення частоти слідування імпульсів струму, температуру зовнішньої поверхні деталі, що нагрівають, далі здійснюють нагрівання деталі до заданого значення...
Спосіб автоматичного керування зносом деталей двигуна внутрішнього згорання
Номер патенту: 45786
Опубліковано: 25.11.2009
Автори: Аулін Віктор Васильович, Онолов Максим Вікторович, Лисенко Володимир Миколайович, Голуб Дмитро Вадимович, Кузик Олександр Володимирович, Лівіцький Олександр Михайлович, Лисенко Сергій Володимирович
МПК: F01M 9/00
Мітки: деталей, спосіб, внутрішнього, згорання, двигуна, зносом, автоматичного, керування
Формула / Реферат:
Спосіб автоматичного керування зносом деталей двигунів внутрішнього згорання в процесі експлуатації, що включає введення в моторну оливу присадки, яка компенсує знос, який відрізняється тим, що за допомогою електронного блока керування на деталі двигуна автоматично подається постійний електричний струм, а в моторну оливу вводиться присадка відповідно до величини і характеру зносу робочих поверхонь деталей.
Спосіб керування зносом деталей двигунів внутрішнього згорання в процесі експлуатації
Номер патенту: 26959
Опубліковано: 10.10.2007
Автори: Онолов Максим Вікторович, Натальїн Ігор Ігорович, Лисенко Сергій Володимирович, Дубовик Віктор Олександрович, Жулай Олександр Юрійович, Бобрицький Віталій Миколайович, Аулін Віктор Васильович
МПК: F01M 9/00
Мітки: експлуатації, деталей, зносом, внутрішнього, спосіб, двигунів, згорання, керування, процесі
Формула / Реферат:
Спосіб керування зносом деталей двигунів внутрішнього згорання в процесі експлуатації, що включає введення в моторне масло присадки, яка компенсує знос, який відрізняється тим, що присадка подається в систему мащення двигуна за допомогою дозаторного пристрою, керування яким здійснюється електронним блоком керування на основі сигналів з датчиків температури моторного масла, тиску в камері згорання та якісного складу картерних газів.
Пристрій для індукційного розпресовування деталей
Номер патенту: 43365
Опубліковано: 10.08.2009
Автори: Півняк Геннадій Григорович, Дрешпак Наталія Станіславівна
МПК: B23P 19/02
Мітки: деталей, індукційного, розпресовування, пристрій
Формула / Реферат:
Пристрій для індукційного розпресовування циліндричних деталей, який включає індуктор, з'єднаний із джерелом живлення, який відрізняється тим, що має розміщену у внутрішній порожнині індуктора знімну секціоновану вимірювальну обмотку з додатковими виводами, виконану у вигляді соленоїда для розміщення на зовнішній поверхні деталі, що нагрівається, а крок намотування індуктора вибраний з умови рівності електрорушійних сил, наведених у секціях...
Спосіб керування величиною мікрогеометрії поверхонь тертя чавунних деталей
Номер патенту: 49560
Опубліковано: 26.04.2010
Автори: Аулін Віктор Васильович, Лисенко Сергій Володимирович, Тихий Андрій Анатолійович, Кузик Олександр Володимирович, Лізунов Сергій Миколайович
МПК: B23H 7/00
Мітки: спосіб, величиною, керування, деталей, поверхонь, мікрогеометрії, тертя, чавунних
Формула / Реферат:
Спосіб керування величиною мікрогеометрії поверхонь тертя чавунних деталей, що включає термічну обробку, який відрізняється тим, що оптимальну мікрогеометрію створюють концентрованими потоками енергії лазера.
Попередній патент: Спосіб попереджування насиджування у індичок
Наступний патент: Спосіб відкритої розробки родовищ м’яких порід
Випадковий патент: Спосіб оцінки порушень мікроциркуляції за допомогою методу капіляроскопії