Спосіб експериментального визначення параметрів синхронної машини
Номер патенту: 93751
Опубліковано: 10.03.2011
Автори: Воробейчик Олег Станіславович, Калінов Андрій Петрович, Остапенко Альона Вікторівна
Формула / Реферат
Спосіб експериментального визначення параметрів синхронної машини, який полягає у тому, що синхронну машину за допомогою двигуна постійного струму розганяють до синхронної швидкості, обмотки статора замикають на активні опори, вимірюють струми і напруги статора та розрахунковим шляхом згідно з векторними діаграмами визначають параметри синхронних індуктивних опорів за повздовжньою та поперечною осями, який відрізняється тим, що вимірюють миттєві значення струмів і напруг статора до підключення навантажувальних опорів до обмотки статора і після їх підключення, визначають кут навантаження, як кут зсуву між кривими напруги до підключення навантажувальних опорів та після їх підключення при суміщенні та відтворенні цих кривих у одній системі координат, визначають ортогональні складові струмів і напруг та визначають індуктивні опори за повздовжньою та поперечною осями.
Текст
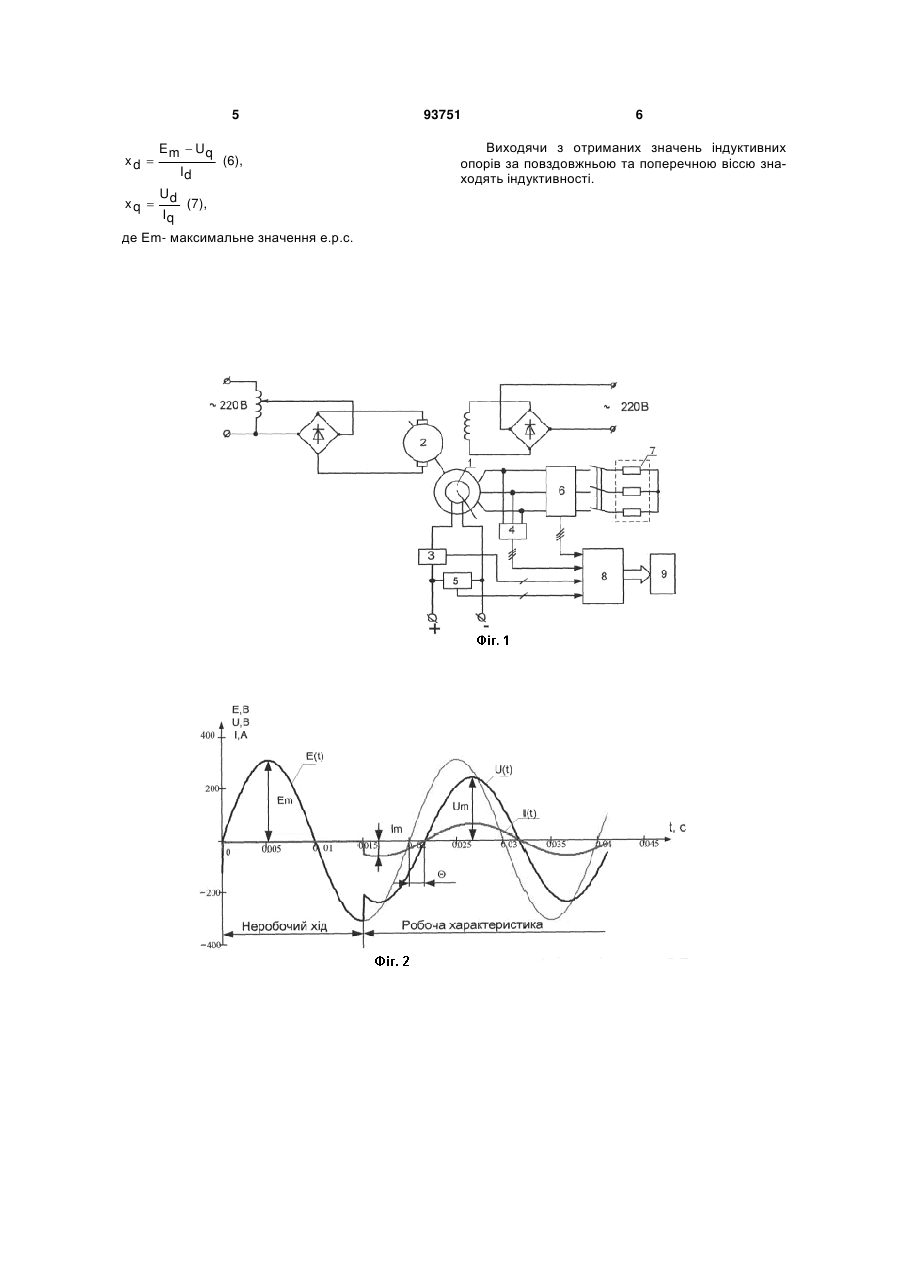
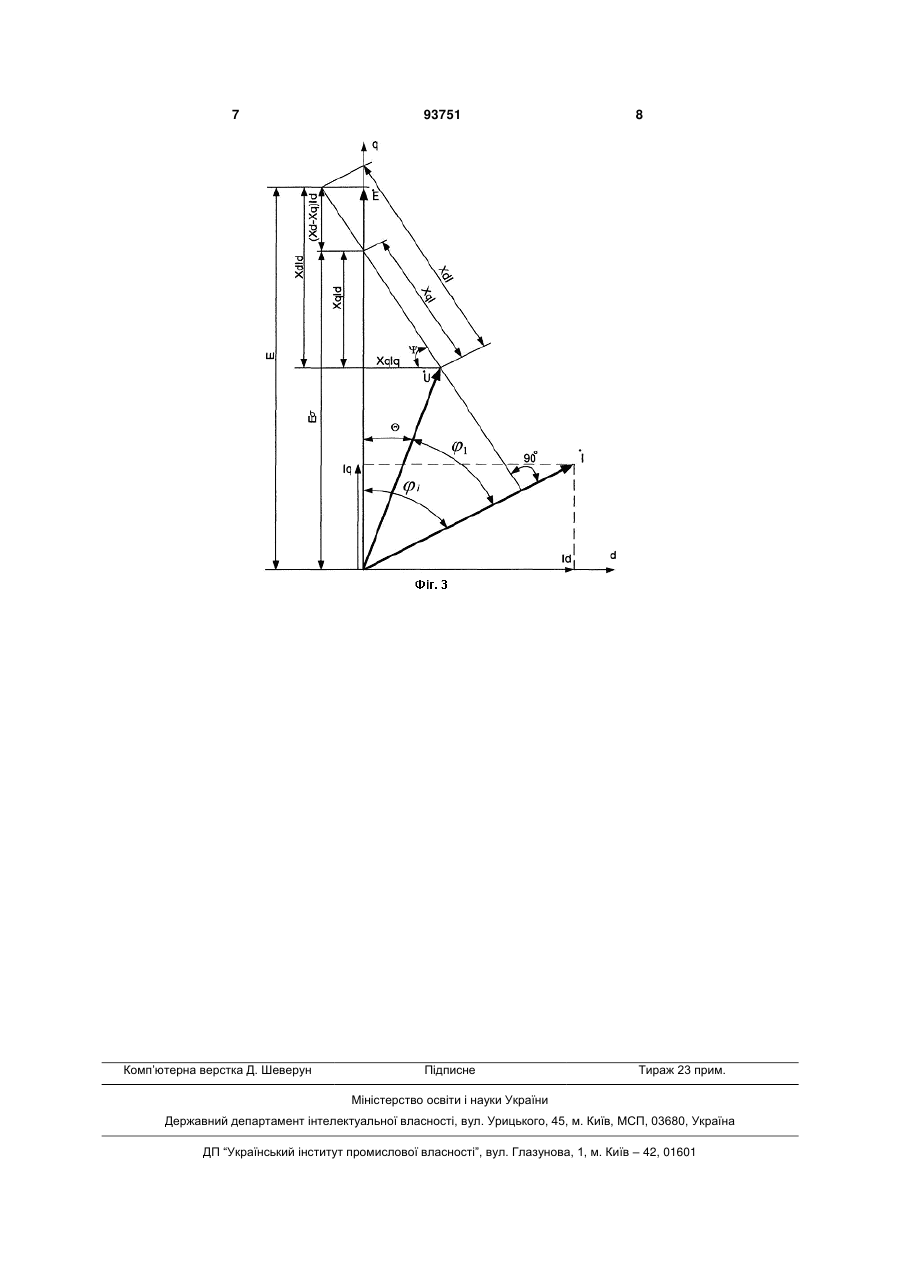
Спосіб експериментального визначення параметрів синхронної машини, який полягає у тому, 3 вжній вісі, змінюється амплітуда змінної напруги номінальної частоти, за допомогою якої здійснюють вплив на обмотку збудження, регулюючи зсув фаз струмів в обмотках статора й ротора, компенсується магнітний потік в повітряному зазорі, вимірюються струми, напруги й активні потужності обмоток статора і обмотки збудження, визначаються повні комплексні опори з боку статора і з боку ротора за повздовжньою віссю, розраховуються активні й індуктивні опори розсіювання обмоток статора і ротора, індуктивний опір взаємоіндукції між обмотками по повздовжній вісі (ненасичене значення) розраховується за допомогою визначеного за методом неробочого ходу і короткого замикання синхронного індуктивного опору за повздовжньою віссю, розраховуються активний і індуктивний опори демпферної обмотки за поздовжньою віссю. Недоліком вищезазначеного способу є необхідність попереднього точного встановлення ротора у положення, що відповідають збігу повздовжньої вісі ротора з напрямком магнітної рушійної сили статора і їх взаємо-перпендикулярному напрямку, необхідність застосування датчика для контролю компенсації магнітного потоку в зазорі СД, необхідність проводити додаткові досліди короткого замикання і холостого ходу для визначення індуктивного опору взаємоіндукції, що збільшує час і обсяг процедури визначення параметрів. Найбільш близьким технічним рішенням, до способу що заявляється є визначення параметрів СД [Камински В., Школьни С. «Метод определения параметров синхронных двигателей, возбуждаемых от постоянных магнитов» збірник // Вісник НТУ «ХПІ». Збірник наукових праць - №45. Харків: НТУ «ХПІ», 2005. - с 320-321] в якому вал СД приводить в рух двигун постійного струму (ДПС), струм і напруга фіксується електромагнітними приборами в кожній фазі двигуна, виходячи з зовнішньої характеристики двигуна для генераторного режиму роботи і використовуючи векторну діаграму можна вивести залежності, що дозволяють знайти індуктивні опори за повздовжньою та поперечною віссю. Недоліки даного способу полягають у тому, що для реалізації схеми використовуються електромагнітні вимірювальні прибори, точність яких знижується при частоті живлення відмінній від номінальної і при вимірюванні несинусоїдного сигналу, для розрахунку параметрів необхідно вимірювати значення мінімально для двох точок зовнішньої характеристики генератора, а також недостатня точність експериментального визначення параметрів. Метою винаходу є підвищення точності й продуктивності операції ідентифікації параметрів синхронної машини, спрощення алгоритму визначення індуктивних опорів та індуктивностей за повздовжньою та поперечною віссю явно полюсної CM. Спосіб полягає у тому, що СМ за допомогою ДПС розганяється до синхронної швидкості, обмотки статора замикаються на активні опори, вимірюються струми і напруги статора та розрахунковим шляхом, згідно з векторними діаграмами визначаються параметри синхронних індуктивних опорів за повздовжньою та поперечною віссю. 93751 4 Технічний результат способу досягається за рахунок того, що вимірюються миттєві значення струмів і напруг статора до підключення навантажувальних опорів до обмотки статора і після їх підключення, визначається кут навантаження, як кут зсуву між кривими напруги до підключення навантажувальних резисторів ( е.р.с. e(t)) та після їх підключення (напруга фази uA(t)) при суміщенні та відтворенні цих кривих у одній системі координат, визначаються ортогональні складові струмів і напруг та визначаються індуктивні опори за повздовжньою та поперечною віссю. Спосіб пояснюється фігурами, на яких представлено: на фігурі 1 - структурна схема експериментальної установки з прийнятими позначеннями: 1 - синхронна машина, 2 - приводний ДПС, 3 датчик струму, 4 - блок датчиків напруги, 5 - датчик напруги, 6 - блок датчиків струму, 7навантажувальні резистори, 8 - аналого-цифровий перетворювач, 9 - персональний комп'ютер; на фігурі 2 - сигнали е.р.с, напруги і струму по одній фазі ;на фігурі 3 - векторна діаграма співвідношень напруг явно полюсного генератора. Спосіб реалізується наступним чином, ДПС приводить до обертання вал CM, що працює в генераторному режимі. Електричні параметри CM фіксують блок датчиків струму і напруги, що розміщують в статорному і роторному колі. В початковий момент пуску CM працює в режимі неробочого ходу за датчиками напруги фіксують е.р.с, що наводиться в обмотці статора. Після подачі навантаження датчики починають фіксувати напругу. Експериментальний сигнал відновлюється за першими гармоніками. За допомогою прямого і оберненого перетворення Фур'є продовжується відновлений сигнал е.р.с. За отриманими сигналами е.р.с, напруги і струму (фіг. 2) визначаємо кути між віссю початку відліку та напругою (u), е.р.с.( е) і струмом (i), а також амплітуди е.р.с, напруги та струму. Кут між векторами напруги і е.р.с- це кут навантаження: = u-e (1), де u - кут між віссю початку відліку та напругою. e- кут між віссю початку відліку та е.р.с. Використовуючи векторну діаграмну співвідношень напруг явно полюсного генератора (фіг. 3) отримуємо залежності для визначення параметрів CM: напруги за повздовжньою та поперечною віссю відповідно: Ud=Um sin (2), Uq=Um cos (3), де Um - амплітудне значення фазної напруги, струми за повздовжньою та поперечною віссю відповідно: Id=Im sin (+1) (4), Iq=Im cos (+1) (5), де Іm - амплітудне значення струму, 1- кут зсуву між напругою та струмом, індуктивні опори за векторною діаграмою знаходяться по співвідношеннях: 5 xd E m Uq Id Ud xq (7), Iq (6), де Еm- максимальне значення е.р.с. 93751 6 Виходячи з отриманих значень індуктивних опорів за повздовжньою та поперечною віссю знаходять індуктивності. 7 Комп’ютерна верстка Д. Шеверун 93751 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for experimental determination of parameters of synchronous machine
Автори англійськоюKalinov Andrii Petrovych, Ostapenko Aliona Viktorivna, Vorobeichyk Oleh Stanislavovych
Назва патенту російськоюСпособ экспериментального определения параметров синхронной машины
Автори російськоюКалинов Андрей Петрович, Остапенко Алена Викторовна, Воробейчик Олег Станиславович
МПК / Мітки
МПК: G01R 31/34
Мітки: визначення, параметрів, спосіб, синхронної, машини, експериментального
Код посилання
<a href="https://ua.patents.su/4-93751-sposib-eksperimentalnogo-viznachennya-parametriv-sinkhronno-mashini.html" target="_blank" rel="follow" title="База патентів України">Спосіб експериментального визначення параметрів синхронної машини</a>
Спосіб визначення електромагнітних параметрів машин змінного струму
Номер патенту: 43931
Опубліковано: 10.09.2009
Автори: Рєзнік Олена Анатоліївна, Рєзнік Дмитро Володимирович, Воробейчик Олег Станіславович, Родькін Дмитро Йосипович, Калінов Андрій Петрович
МПК: G01R 27/28
Мітки: машин, спосіб, параметрів, визначення, струму, електромагнітних, змінного
Формула / Реферат:
Спосіб визначення електромагнітних параметрів машин змінного струму, який полягає в тому, що до статорних обмоток нерухомого асинхронного двигуна підключають датчики струму та напруги, а обмотки до джерела зі змінною частотою напруги живлення, задають ряд значень напруги та частоти на виході джерела живлення, знімають показання напруги та струму, визначають повний та еквівалентні активний і реактивний опір схеми заміщення асинхронного...
Спосіб визначення електромагнітних параметрів машин змінного струму
Номер патенту: 51956
Опубліковано: 10.08.2010
Автори: Рєзнік Дмитро Володимирович, Калінов Андрій Петрович, Воробейчик Олег Станіславович
МПК: G01R 27/28
Мітки: електромагнітних, змінного, струму, параметрів, визначення, спосіб, машин
Формула / Реферат:
Спосіб визначення електромагнітних параметрів машин змінного струму, який полягає в тому, що до статорних обмоток нерухомого асинхронного двигуна підключають датчики струму та напруги, а обмотки до джерела зі змінною частотою напруги живлення ( - номінальне сковзання,
Спосіб визначення параметрів тримасової механічної коливальної системи вібраційної машини з електромагнітним приводом
Номер патенту: 25771
Опубліковано: 27.08.2007
Автор: Ланець Олексій Степанович
Мітки: параметрів, спосіб, коливальної, системі, механічної, вібраційної, приводом, визначення, машини, тримасової, електромагнітним
Формула / Реферат:
Спосіб визначення параметрів тримасової механічної коливальної системи вібраційної машини з електромагнітним приводом, згідно з яким за фіксованих двох коливальних мас вимірюють значення їх інерційних параметрів Ω, а саме значення моменту інерції відносно власної центральної осі симетрії для крутильних коливань, або значення маси для прямолінійних коливань, встановлюють згідно з аналітичною залежністю значення інерційного параметра...
Спосіб визначення параметрів тримасової механічної коливальної системи вібраційної машини з електромагнітним приводом
Номер патенту: 22199
Опубліковано: 25.04.2007
Автор: Ланець Олексій Степанович
Мітки: машини, приводом, механічної, коливальної, параметрів, системі, електромагнітним, визначення, вібраційної, спосіб, тримасової
Формула / Реферат:
Спосіб визначення параметрів тримасової механічної коливальної системи вібраційної машини з електромагнітним приводом, згідно з яким за фіксованих двох коливальних мас вимірюють значення їх інерційних параметрів , а саме значення моменту інерції відносно власної центральної осі симетрії для крутильних коливань або значення маси для прямолінійних коливань, а значення...
Пристрій для запуску синхронної машини
Номер патенту: 25446
Опубліковано: 30.10.1998
Автори: Плахтина Омелян Григорович, Куцик Андрій Степанович
МПК: H02P 6/00
Мітки: синхронної, запуску, пристрій, машини
Формула / Реферат:
Пристрій для запуску синхронної машини, що містить збудник синхронної машини, підключений до її індуктора, безпосередній перетворювач частоти з природньою комутацією тиристорів, причому керуючі входи тиристорів кожної фази з'єднані з відповідними виходами формувачів відпираючих імпульсів, перші входи яких з'єднані з виходами елементів "І", а другі входи - з виходом блоку задания кута керування, давач положення ротора синхронної...
Попередній патент: Стійкий до корозії напівпричіп для перевезення дорожніх автомобілів з вузлами на болтовому кріпленні
Наступний патент: Спосіб виявлення пошкоджень обмоток короткозамкненого ротора асинхронного двигуна
Випадковий патент: Коксогазова вагранка