Передавальний пристрій, який забезпечує обертання навколо щонайменше однієї вихідної осі і спосіб забезпечення обертання навколо неї
Формула / Реферат
1. Передавальний пристрій який забезпечує обертання навколо щонайменше однієї вихідної осі, який містить:
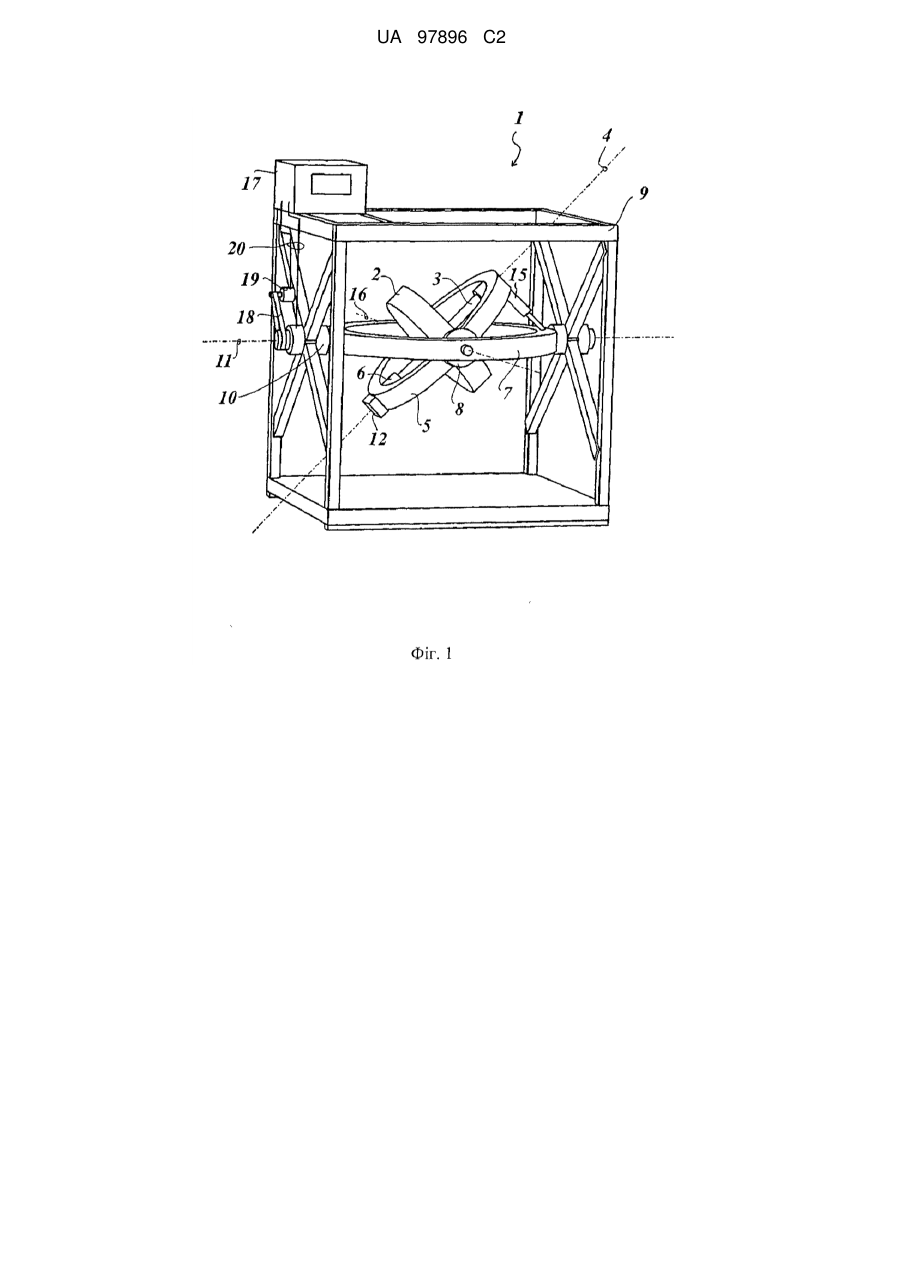
- тіло (2), виконане з можливістю з'єднання з джерелом рушійної енергії, яке викликає його обертання навколо першої осі (4) обертання, навколо другої осі (11) обертання і навколо третьої осі (16) обертання, причому перша вісь (4) розташована під кутом (Θ) нахилу відносно другої осі (11), друга вісь (11) і/або третя вісь (16) являють собою щонайменше одну вихідну вісь пристрою, при цьому обертання тіла (2) навколо третьої осі (16) спричиняє зміну кута (Θ) нахилу;
- засіб (15) прикладання крутного моменту (21) до тіла (2) відносно третьої осі (16) в напрямку збільшення кута (Θ) нахилу, коли перша вісь (4) розташована під вибраним кутом (Θ) нахилу відносно другої осі (11), який більше 0 градусів і менше 90 градусів; і
- засіб (210) обмеження обертання тіла (2) навколо третьої осі (16) в напрямку зменшення кута (Θ) нахилу таким чином, щоб кут (Θ) нахилу першої осі (4) відносно другої осі (11) залишався більше 0 градусів і менше 90 градусів,
причому обертання тіла (2) навколо першої осі (4) відбувається з кутовою швидкістю (ωspin), яка перевищує критичну кутову швидкість (ωс), що забезпечує постійний або зменшуваний кут (Θ) нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість (ωоut) і/або вихідний крутний момент при обертанні тіла (2) навколо другої осі (11) і/або третьої осі (16) як щонайменше однієї вихідної осі,
який відрізняється тим, що тіло (2) має характерну критичну кутову швидкість (ωc,spec), яка складає менше 20000 обертів за хвилину, для збільшення вихідної енергії на щонайменше одній вихідній осі,
при цьому характерна критична кутова швидкість (ωc,spec) дорівнює критичній кутовій швидкості (ωc) тіла (2), коли
кут (Θ) нахилу першої осі (4) відносно другої осі (11) дорівнює 45 градусам,
перша вісь (4) проходить, по суті, через центр мас (ЦМ) тіла (2),
тіло (2) розташоване таким чином, щоб його момент інерції був, по суті, максимальним,
при несиметричності тіла (2) відносно площини, яка проходить через його центр мас (ЦМ) і ортогонально першій осі (4), з можливих положень при встановленні тіла (2) на першій осі (4) вибране те, яке забезпечує меншу відстань між центром маси (ЦМ) тіла (2) і третьою віссю (16), і
довжина (lc) з'єднувальної ланки, яка являє собою відстань від точки перетину площини (Рс) з'єднання і першої осі (4) до третьої осі (16), при цьому площина (Рс) з'єднання є площиною, яка ортогональна першій осі (4), проходить через тіло (2) і розташована на мінімальній відстані до осі (16) нахилу, становить:
5 мм при масі тіла (2) менше 0,1 кг,
25 мм при масі тіла (2), яка дорівнює або перевищує 0,1 кг, але менше 100 кг,
50 мм при масі тіла (2), яка дорівнює або перевищує 100 кг, але менше 1000 кг, і
100 мм при масі тіла (2), яка дорівнює або перевищує 1000 кг.
2. Пристрій за п. 1, який відрізняється тим, що є рушійним пристроєм.
3. Пристрій за п. 1 або 2, який відрізняється тим, що додатково містить джерело рушійної енергії, яке з'єднане з тілом (2) для приведення тіла (2) у обертання.
4. Пристрій за п. 3, який відрізняється тим, що додатково містить засіб (17, 18, 19, 20) зворотного зв'язку для передачі рушійної енергії від обертання тіла (2) навколо щонайменше однієї вихідної осі в джерело рушійної енергії.
5. Пристрій за п. 4, який відрізняється тим, що засіб (17, 18, 19, 20) зворотного зв'язку виконаний з можливістю передачі в джерело рушійної енергії рушійної енергії, достатньої для компенсації втрат енергії, виникаючих через тертя при обертанні тіла (2) навколо першої осі (4), коли постійними є кут (Θ) нахилу, величина крутного моменту, прикладеного відносно третьої осі (16), і вихідна кутова швидкість (ωout) руху навколо щонайменше однієї вихідної осі.
6. Пристрій за будь-яким з пп. 1-5, який відрізняється тим, що додатково містить засіб керування джерелом рушійної енергії, що забезпечує обертання тіла (2) навколо першої осі (4) з кутовою швидкістю (ωspin), що перевищує критичну кутову швидкість (ωс).
7. Пристрій за будь-яким з пп. 1-6, який відрізняється тим, що засіб (15) прикладання крутного моменту виконаний з можливістю прикладання крутного моменту (21) відносно третьої осі (16), коли вибраний кут (Θ) нахилу більше 10 градусів і менше 80 градусів.
8. Пристрій за будь-яким з пп. 1-7, який відрізняється тим, що додатково містить засіб керування величиною крутного моменту (21), який прикладається засобом (15) прикладання крутного моменту.
9. Пристрій за будь-яким з пп. 1-8, який відрізняється тим, що засіб (210) обмеження виконаний з можливістю обмеження обертання тіла (2) навколо третьої осі (16) таким чином, щоб кут (Θ) нахилу першої осі (4) відносно другої осі (11) був більше 10 градусів і менше 80 градусів.
10. Пристрій за будь-яким з пп. 1-8, який відрізняється тим, що додатково містить засіб регулювання кута (Θ) нахилу.
11. Пристрій за п. 10, який відрізняється тим, що додатково містить засіб, який служить для вибору необхідної вихідної кутової швидкості (ωout) руху навколо щонайменше однієї вихідної осі і викликає регулювання кута (Θ) нахилу засобом регулювання залежно від вибраної вихідної кутової швидкості (ωout).
12. Пристрій за п. 10 або 11, який відрізняється тим, що додатково містить засіб, який служить для вибору необхідного вихідного крутного моменту пристрою і регулювання кута (Θ) нахилу залежно від вибраного вихідного крутного моменту.
13. Пристрій за будь-яким з пп. 1-12, який відрізняється тим, що засіб (15) прикладання крутного моменту (21) відносно третьої осі (16) містить пружину.
14. Пристрій за будь-яким з пп. 1-13, який відрізняється тим, що засіб (15) прикладання крутного моменту (21) відносно третьої осі (16) містить одне або більше з: гідравлічного циліндра, пневматичного циліндра, електромагнітного циліндра.
15. Пристрій за будь-яким з пп. 1-14, який відрізняється тим, що засіб (210) обмеження виконаний з можливістю запобігання обертанню тіла (2) навколо третьої осі (16) в напрямку зменшення кута (Θ) нахилу.
16. Пристрій за будь-яким з пп. 1-15, який відрізняється тим, що засіб (15) прикладання крутного моменту (21) відносно третьої осі (16) додатково служить засобом (210) обмеження.
17. Пристрій за будь-яким з пп. 1-16, який відрізняється тим, що засіб (210) обмеження містить упор.
18. Пристрій за будь-яким з пп. 1-17, який відрізняється тим, що перша вісь (4) проходить, по суті, через центр мас (ЦМ) тіла (2).
19. Пристрій за будь-яким з пп. 1-18, який відрізняється тим, що друга вісь (11) проходить, по суті, через центр мас (ЦМ) тіла (2).
20. Пристрій за будь-яким з пп. 1-19, який відрізняється тим, що перша вісь (4) і друга вісь (11) перетинаються.
21. Пристрій за будь-яким з пп. 1-19, який відрізняється тим, що перша вісь (4) і друга вісь (11) не перетинаються, і кут (Θ) нахилу визначений як гострий кут між першою віссю (4) і другою віссю (11), якщо дивитися в напрямку найкоротшого відрізка, який з'єднує першу вісь (4) і другу вісь (11).
22. Пристрій за будь-яким з пп. 1-21, який відрізняється тим, що тіло (2) є, по суті, циліндрично симетричним відносно першої осі (4).
23. Пристрій за будь-яким з пп. 1-22, який відрізняється тим, що тіло (2) містить маточину, диск і кільцевий обід.
24. Пристрій за будь-яким з пп. 1-23, який відрізняється тим, що тіло (2) виготовлене з матеріалу, що має модуль пружності вище 70 ГПа, переважно вище 100 ГПа.
25. Пристрій за будь-яким з пп. 1-24, який відрізняється тим, що додатково містить засіб встановлення пристрою.
26. Пристрій за будь-яким з пп. 1-25, який відрізняється тим, що додатково містить одну або більше противаг, встановлених для обертання навколо другої осі.
27. Пристрій за будь-яким з пп. 1-26, який відрізняється тим, що кут між вектором крутного моменту (21), прикладеного до тіла (2) відносно третьої осі (16), і вектором вихідної кутової швидкості (ωout) руху навколо другої осі (11) становить від 85 градусів до 93 градусів, переважно близько 90 градусів.
28. Пристрій за будь-яким з пп. 1-27, який відрізняється тим, що містить вал (3, 30), на якому встановлене тіло (2) і який виготовлений з матеріалу з модулем пружності вище 70 ГПа, переважно вище 100 ГПа.
29. Пристрій за будь-яким з пп. 1-28, який відрізняється тим, що додатково містить вихідний вал (110), який проходить вздовж щонайменше однієї вихідної осі, виготовлений з матеріалу з модулем пружності вище 70 ГПа, переважно вище 100 ГПа.
30. Пристрій за будь-яким з пп. 1-29, який відрізняється тим, що його частини, схильні до впливу змінних сил, виготовлені з одного або більше матеріалів з модулем пружності вище 70 ГПа, переважно вище 100 ГПа.
31. Пристрій за будь-яким з пп. 1-30, який відрізняється тим, що додатково містить один або більше датчиків для визначення значень одного або більше з наступних параметрів: наявності обертання навколо першої осі (4) і/або навколо другої осі (11), і/або навколо третьої осі (16), кутової швидкості обертання навколо першої осі (4) і/або навколо другої осі (11), і/або навколо третьої осі (16), положення тіла (2) і/або першої осі (4), і/або другої осі (11), і/або третьої осі (16), крутного моменту при обертанні навколо першої осі (4) і/або навколо другої осі (11), і/або навколо третьої осі (16), а також сили.
32. Пристрій за будь-яким з пп. 1-31, який відрізняється тим, що додатково містить засіб механічного обмеження обертання тіла (2) навколо осі (16) нахилу в обох напрямках між значенням нижнього граничного кута і значенням верхнього граничного кута і засіб регулювання цих значень граничних кутів під час роботи пристрою до вибраного значення нижнього граничного кута більше 0 градусів і менше 90 градусів і значення верхнього граничного кута більше вибраного значення нижнього граничного кута і менше 90 градусів.
33. Пристрій за п. 32, який відрізняється тим, що засіб механічного обмеження обертання тіла (2) являє собою один або більше упорів.
34. Пристрій за будь-яким із пп. 1-33, який відрізняється тим, що використовується у вузлі із двох або більше передавальних пристроїв, причому вузол містить засоби приведення кожного із цих пристроїв в обертання по суті з однаковою швидкістю, але з різними кутами відповідних фаз, і засіб об'єднання вихідної кутової швидкості (ωout) і/або вихідного крутного моменту пристроїв.
35. Пристрій за будь-яким з пп. 1-34, який відрізняється тим, що використовується для приведення в дію транспортного засобу.
36. Пристрій за п. 35, який відрізняється тим, що транспортний засіб є дорожнім транспортним засобом.
37. Пристрій за п. 35, який відрізняється тим, що транспортний засіб є повітряним судном.
38. Пристрій за п. 35, який відрізняється тим, що транспортний засіб є плавучим транспортним засобом.
39. Пристрій за будь-яким з пп. 1-34, який відрізняється тим, що використовується в генераторі електрики.
40. Пристрій за будь-яким з пп. 1-39, який відрізняється тим, що тіло (2) виконане з можливістю встановлення з ексцентриситетом щодо осі (16) нахилу, що забезпечує одержання плеча довжиною l>0.
41. Пристрій за будь-яким з пп. 1-40, який відрізняється тим, що навантаження, прикладене до третьої осі (16), використовується як засіб обмеження при зменшенні кута (Θ) нахилу, щоб здійснити відбір енергії, яка виникає на третій осі (16).
42. Спосіб забезпечення обертання навколо щонайменше однієї вихідної осі, згідно з яким:
- встановлюють тіло (2) для обертання навколо першої осі (4), обертання навколо другої осі (11) і обертання навколо третьої осі (16), причому перша вісь (4) розташована під кутом (Θ) нахилу відносно другої осі (11), друга вісь (11) і/або третя вісь (16) являють собою щонайменше одну вихідну вісь, при цьому обертання тіла (2) навколо третьої осі (16) викликає зміну кута (Θ) нахилу;
- приводять тіло (2) у обертання навколо першої осі (4) з кутовою швидкістю (ωspin), що перевищує критичну кутову швидкість (ωс);
- прикладають до тіла (2) крутний момент (21) відносно третьої осі (16) в напрямку збільшення кута (Θ) нахилу, коли перша вісь (4) розташована під вибраним кутом (Θ) нахилу відносно другої осі (11), який більше 0 градусів і менше 90 градусів; і
- обмежують обертання тіла (2) навколо третьої осі (16) у напрямку зменшення кута (Θ) нахилу таким чином, щоб кут (Θ) нахилу першої осі (4) відносно другої осі (11) залишався більше 0 градусів і менше 90 градусів, таким чином
забезпечуючи постійний або зменшуваний кут (Θ) нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість (ωоut) і/або вихідний крутний момент при обертанні тіла (2) навколо другої осі (11) і/або третьої осі (16) як щонайменше однієї вихідної осі,
який відрізняється тим, що при його виконанні:
- тіло (2) обертають з характерною критичною кутовою швидкістю (ωc,spec) менше 20000 обертів за хвилину для збільшення вихідної енергії на щонайменше одній вихідній осі,
при цьому характерна критична кутова швидкість (ωc,spec) дорівнює критичній кутовій швидкості (ωc) тіла (2), при куті (Θ) нахилу першої осі (4) відносно другої осі (11), що дорівнює 45 градусам, при проходженні першої осі (4), по суті, через центр мас (ЦМ) тіла (2), при такому розташуванні тіла (2), щоб його момент інерції був, по суті, максимальним, при несиметричності тіла (2) відносно площини, яка проходить через його центр маси (ЦМ) і ортогональна першій осі (4), з можливих положень при встановленні тіла (2) на першій осі (4) вибране те, яке забезпечує меншу відстань між центром маси (ЦМ) тіла (2) і третьою віссю (16), і при довжині (lc) з'єднувальної ланки, яка являє собою відстань від точки перетину площини (Рс) з'єднання і першої осі (4) до третьої осі (16), при цьому площина (Рс) з'єднання являє собою площину, яка ортогональна першій осі (4), проходить через тіло (2) і розташована на мінімальній відстані до осі (16) нахилу, становить:
5 мм при масі тіла (2) менше 0,1 кг,
25 мм при масі тіла (2), яка дорівнює або перевищує 0,1 кг, але менше 100 кг,
50 при масі тіла (2), яка дорівнює або перевищує 100 кг, але менше 1000 кг, і 100 при масі тіла (2), яка дорівнює або перевищує 1000 кг.
43. Спосіб за п. 42, який відрізняється тим, що додатково створюють додатковий, зовнішній крутний момент, який діє на тіло (2) відносно другої осі, для забезпечення первинного прискорення.
44. Спосіб за п. 42 або 43, який відрізняється тим, що додатково керують джерелом рушійної енергії для приведення тіла (2) у обертання навколо першої осі (4) із кутовою швидкістю (ωspin), що перевищує критичну кутову швидкість (ωс).
45. Спосіб за будь-яким з пп. 42-44, який відрізняється тим, що додатково вибирають згаданий вибраний кут (Θ) нахилу більше 10 градусів і менше 80 градусів.
46. Спосіб за будь-яким з пп. 42-45, який відрізняється тим, що додатково керують величиною крутного моменту (21), прикладеного до тіла (2) відносно третьої осі (16).
47. Спосіб за будь-яким з пп. 42-46, який відрізняється тим, що додатково обмежують обертання тіла (2) навколо третьої осі (16) таким чином, щоб кут (Θ) нахилу першої осі (4) відносно другої осі (11) був більше 10 градусів і менше 80 градусів.
48. Спосіб за будь-яким з пп. 42-47, який відрізняється тим, що додатково регулюють кут (Θ) нахилу.
49. Спосіб за п. 48, який відрізняється тим, що додатково створюють необхідну вихідну кутову швидкість (ωout) руху навколо однієї з множини вихідних осей, що містить щонайменше одну вихідну вісь, шляхом регулювання кута (Θ) нахилу.
50. Спосіб за п. 48, який відрізняється тим, що додатково створюють необхідний вихідний крутний момент відносно однієї з множини вихідних осей, що містить щонайменше одну вихідну вісь, шляхом регулювання кута (Θ) нахилу.
51. Спосіб за будь-яким з пп. 42-50, який відрізняється тим, що додатково регулюють кутову швидкість (ωspin) руху тіла (2) навколо першої осі (4).
52. Спосіб за п. 51, який відрізняється тим, що додатково створюють необхідну вихідну кутову швидкість (ωout) руху навколо однієї з множини вихідних осей, що містить щонайменше одну вихідну вісь, шляхом регулювання кутової швидкості (ωspin) руху тіла (2) навколо першої осі (4).
53. Спосіб за п. 51, який відрізняється тим, що додатково створюють необхідний вихідний крутний момент відносно однієї з множини вихідних осей, що містить щонайменше одну вихідну вісь, шляхом регулювання кутової швидкості (ωspin) руху тіла (2) навколо першої осі (4).
54. Спосіб за будь-яким з пп. 42-53, який відрізняється тим, що додатково регулюють крутний момент (21), прикладений до тіла (2) відносно третьої осі (16).
55. Спосіб за п. 54, який відрізняється тим, що додатково створюють необхідну вихідну кутову швидкість (ωout) руху навколо однієї з множини вихідних осей, що містить щонайменше одну вихідну вісь, шляхом регулювання крутного моменту (21), прикладеного до тіла (2) відносно третьої осі (16).
56. Спосіб за п. 54, який відрізняється тим, що додатково створюють необхідний вихідний крутний момент відносно однієї з множини вихідних осей, що містить щонайменше одну вихідну вісь, шляхом регулювання крутного моменту, прикладеного до тіла (2) відносно третьої осі (16).
57. Спосіб за будь-яким з пп. 42-56, який відрізняється тим, що при обмеженні обертання тіла (2) навколо третьої осі (16) додатково запобігають обертанню тіла (2) навколо третьої осі (16) в напрямку зменшення кута (Θ) нахилу.
58. Спосіб за будь-яким з пп. 42-57, який відрізняється тим, що додатково використовують деяку кількість енергії обертального руху, створеної на щонайменше одній вихідній осі, для забезпечення обертання тіла (2) навколо першої осі (4), коли постійними є кут (Θ) нахилу, величина крутного моменту (21), прикладеного відносно третьої осі (16), і вихідна кутова швидкість (ωоut) руху навколо щонайменше однієї вихідної осі.
59. Спосіб за п. 58, який відрізняється тим, що використовуваної таким чином кількості енергії обертального руху достатньо для компенсації втрат енергії, виникаючих через тертя при обертанні тіла (2) навколо першої осі (4).
60. Спосіб за будь-яким з пп. 42-59, який відрізняється тим, що додатково прикладають крутний момент (21) до тіла (2) відносно третьої осі (16) шляхом прикладання крутного моменту виключно за рахунок ваги тіла (2) або прикладання крутного моменту за допомогою зовнішніх засобів і додатково - за рахунок ваги тіла (2).
61. Спосіб за будь-яким з пп. 42-60, який відрізняється тим, що додатково визначають значення одного або більше з наступних параметрів:
- обертання навколо першої осі (4) і/або обертання навколо другої осі (11), і/або обертання навколо третьої осі (16),
- кутової швидкості обертання навколо першої осі (4) і/або обертання навколо другої осі (11), і/або обертання навколо третьої осі (16),
- положення тіла (2) і/або першої осі (4), і/або другої осі (11), і/або третьої осі (16),
- крутного моменту при обертанні навколо першої осі (4) і/або навколо другої осі (11), і/або навколо третьої осі (16), і
- сили.
62. Спосіб за будь-яким з пп. 42-61, який відрізняється тим, що додатково механічним шляхом обмежують обертання тіла (2) навколо осі (16) нахилу в обох напрямках між значенням нижнього граничного кута і значенням верхнього граничного кута і, при одночасному забезпеченні обертання під час роботи передавального пристрою, регулюють ці значення граничних кутів до вибраного значення нижнього граничного кута більше 0 градусів і менше 90 градусів і значення верхнього граничного кута більше вибраного значення нижнього граничного кута і менше 90 градусів.
63. Спосіб за будь-яким з пп. 42-62, який відрізняється тим, що додатково збільшують вихідну енергію, створену на щонайменше одній вихідній осі, шляхом зменшення відстані між центром мас (ЦМ) тіла (2) і другою віссю (11).
64. Спосіб за будь-яким з пп. 42-63, який відрізняється тим, що додатково збільшують вихідну енергію, створену на щонайменше одній вихідній осі, шляхом зменшення варіації кута між нормальним вектором першої площини рами і нормальним вектором другої площини рами, де площина рами являє собою площину, що проходить через три точки рами,
які не лежать на одній прямій, всередині якої встановлений передавальний пристрій, переважно рушійний пристрій.
65. Спосіб за п. 64, який відрізняється тим, що додатково підтримують варіацію на рівні менше 5 градусів.
66. Спосіб за будь-яким з пп. 42-65, який відрізняється тим, що додатково збільшують вихідну енергію, створену на щонайменше одній вихідній осі, шляхом зменшення варіації кута між вектором вихідної кутової швидкості (ωout) руху навколо щонайменше однієї вихідної осі і нормальним вектором площини рами, де площина рами являє собою площину, що проходить через три точки рами, які не лежать на одній прямій, всередині якої встановлений передавальний пристрій.
67. Спосіб за п. 66, який відрізняється тим, що додатково підтримують варіацію на рівні менше 5 градусів.
68. Спосіб за будь-яким з пп. 42-67, який відрізняється тим, що додатково збільшують вихідну енергію, створену на щонайменше одній вихідній осі, шляхом зменшення варіації кута між вектором кутової швидкості при обертальному русі тіла (2) навколо першої осі (4) і нормальним вектором площини тіла, де площина тіла являє собою площину, що проходить через три точки тіла (2), які не лежать на одній прямій.
69. Спосіб за п. 68, який відрізняється тим, що додатково підтримують варіацію на рівні менше 5 градусів.
70. Спосіб за будь-яким з пп. 42-69, який відрізняється тим, що додатково встановлюють різні значення кутової швидкості (ωspin) тіла (2) при його русі навколо осі (4) власного обертання, причому для кожного з цих різних значень шляхом визначення напрямку обертання осі (4) власного обертання відносно осі (16) нахилу визначають, перевищує чи ні встановлена кутова швидкість (ωspin) критичну кутову швидкість (ωс).
71. Спосіб за будь-яким з пп. 42-70, який відрізняється тим, що додатково відбирають енергію, що виникла на третій осі (16), в напрямку зменшення кута (Θ) нахилу, коли кут (Θ) нахилу зменшується.
Текст
Реферат: Винахід стосується передавального пристрою, переважно рушійного пристрою, що забезпечує обертання навколо щонайменше однієї вихідної осі, і способу забезпечення обертання. Тіло (2) встановлене для обертання навколо першої осі (4), другої осі (11) і третьої осі (16). Перша вісь (4) розташована відносно другої осі (11) під кутом нахилу. Друга вісь (11) і/або третя вісь (16) являють собою згадану щонайменше одну вихідну вісь пристрою. Обертання тіла (2) навколо третьої осі (16) спричиняє зміну кута нахилу. Циліндр (15) прикладає крутний момент (21) до тіла (2) відносно третьої осі (16) в напрямку збільшення кута нахилу, коли перша вісь (4) знаходиться під вибраним кутом нахилу відносно другої осі (11), який більше 0 градусів і менше 90 градусів. Обертання тіла (2) навколо третьої осі (16) в напрямку зменшення кута нахилу обмежують таким чином, щоб кут нахилу першої осі (4) відносно другої осі (11) залишався більше 0 градусів і менше 90 градусів. Тіло (2) приводять у обертання навколо першої осі (4) з кутовою швидкістю, що перевищує критичну кутову швидкість, щоб забезпечувався постійний або зменшуваний кут нахилу. UA 97896 C2 (12) UA 97896 C2 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід стосується передавального пристрою, переважно рушійного пристрою, і більш конкретно передавального пристрою, переважно рушійного пристрою, який може створювати вихідну енергію обертального руху щонайменше на одній вихідній осі у відповідь на вхідну енергію обертального руху на іншій осі. Крім того, даний винахід стосується способу забезпечення обертання і випробувального пристрою, призначеного для визначення параметрів конструкції і функціонування такого передавального пристрою, переважно рушійного пристрою, і відповідного способу. Коли на обертове тіло діє крутний момент відносно осі, перпендикулярної осі обертання, це спричиняє обертання самої осі обертання навколо додаткової осі, яка перпендикулярна як осі прикладеного крутного моменту, так і осі обертання. Цей принцип добре відомий в гіроскопах. Ефект називається прецесією. Задачею даного винаходу є запропонувати вдосконалений передавальний пристрій, переважно рушійний пристрій, в якому використовується вказаний вище принцип, і відповідний спосіб забезпечення обертання за допомогою згаданого передавального пристрою, переважно рушійного пристрою. Ця задача вирішується даним винаходом різними методами, які сформульовані в пунктах Формули винаходу і описані далі. Методи 1-4 і метод 15 стосуються пристроїв, що являють собою передавальний пристрій, переважно рушійний пристрій. Методи 5-12 і метод 16 стосуються способів, що являють собою способи забезпечення обертання. Метод 13 стосується пристрою, що являє собою випробувальний пристрій, призначений для визначення параметрів конструкції і функціонування передавального пристрою, переважно рушійного пристрою, відповідного даному винаходу. Метод 14 стосується способу, що являє собою спосіб визначення параметрів конструкції і функціонування передавального пристрою, переважно рушійного пристрою, відповідного даному винаходу. Різні методи 1-16 описані в пунктах Формули винаходу. Основні пункти по структурі складаються з обмежувальної частини (Прим, перекл. 1) і відмітної частини. Ця структура покликана полегшити розуміння об'єкта, визначеного в пунктах Формули винаходу. Розподіл ознак по обмежувальній і відмітній частині не означає, що всі ознаки в обмежувальній частині є відомими, а всі ознаки у відмітній частині є новаторськими, або навпаки. Значення ознак в пунктах Формули винаходу не залежить від того, чи знаходяться вони в обмежувальній частині або у відмітній частині. Рішення, відповідне методу 1, реалізовується за допомогою об'єкта, , визначеного в пункті 1 Формули винаходу. Об'єктом пункту 1 Формули винаходу є передавальний пристрій, переважно рушійний пристрій, що забезпечує обертання навколо щонайменше однієї вихідної осі, і цей передавальний пристрій, переважно рушійний пристрій, містить тіло, встановлене для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь передавального пристрою, переважно рушійного пристрою, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; засіб прикладання крутного моменту до тіла відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і засіб обмеження обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, причому передавальний пристрій виконаний в такій конструкції, щоб зробити можливим з'єднання з тілом джерела рушійної енергії для приведення тіла у обертання навколо першої осі, при цьому обертання тіла навколо першої осі відбувається з кутовою швидкістю, що перевищує критичну кутову швидкість, яка забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі і/або третьої осі, як згаданої щонайменше однієї вихідної осі, при цьому тіло має характерну критичну кутову швидкість менше 20000 обертів за хвилину, переважно з метою збільшення вихідної енергії на згаданій щонайменше одній вихідній осі, при цьому згадану характерну критичну кутову швидкість визначають таким чином: характерна критична кутова швидкість являє собою критичну кутову швидкість тіла, коли кут нахилу першої осі відносно другої осі дорівнює 45 градусам, коли перша вісь проходить, по суті, через центр маси тіла, коли тіло розташоване таким чином, щоб його момент інерції був, по суті, збільшений до максимуму, коли, при несиметричності тіла відносно площини, що проходить через його центр маси і ортогональна першій осі, з можливих положень при встановленні тіла на першій осі вибирають те, яке забезпечує меншу відстань між центром маси тіла і третьою віссю, і коли довжина 1 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 з'єднувальної ланки становить: 5 мм, якщо маса тіла менше 0,1 кг, 25 мм, якщо маса тіла дорівнює або перевищує 0,1 кг, але менше 100 кг, 50 мм, якщо маса тіла дорівнює або перевищує 100 кг, але менше 1000 кг, і 100 мм, якщо маса тіла дорівнює або перевищує 1000 кг, при цьому згадана довжина з'єднувальної ланки являє собою відстань від точки перетину площини з'єднання і першої осі до третьої осі, при цьому згадана площина з'єднання являє собою площину, яка ортогональна першій осі, проходить через тіло і розташована на мінімальній відстані до осі нахилу. Рішення, відповідне методу 2, реалізовується за допомогою об'єкта, визначеного в пункті 26 Формули винаходу. Об'єктом пункту 26 Формули винаходу є передавальний пристрій, переважно рушійний пристрій, що забезпечує обертання навколо щонайменше однієї вихідної осі, і цей передавальний пристрій, переважно рушійний пристрій, містить тіло, встановлене для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь передавального пристрою, переважно рушійного пристрою, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; засіб прикладання крутного моменту до тіла відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і засіб обмеження обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, причому передавальний пристрій виконаний такої конструкції, щоб зробити можливим з'єднання з тілом джерела рушійної енергії для приведення тіла у обертання навколо першої осі, при цьому обертання тіла навколо першої осі відбувається з кутовою швидкістю, що перевищує критичну кутову швидкість, яка забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі і/або третьої осі як згаданої щонайменше однієї вихідної осі, при цьому кут між вектором крутного моменту, прикладеного до тіла відносно третьої осі, і вектором вихідної кутової швидкості руху навколо другої осі заданий в діапазоні від 85 градусів до 93 градусів, переважно близько до 90 градусів. Якщо кут між вектором крутного моменту, прикладеного до тіла відносно третьої осі, і вектором вихідної кутової швидкості руху навколо другої осі заданий в діапазоні від 85 градусів до 93 градусів, переважно близько до 90 градусів, то вихідна енергія, що утворюється на згаданій щонайменше одній вихідній осі, збільшується. Коли кут між вектором крутного моменту, прикладеного до тіла відносно третьої осі (тобто вектором прикладеного крутного моменту ), і вектором вихідного руху перевищує 90 градусів, то, навіть якщо кут нахилу є постійним, обертання тіла навколо третьої осі в напрямку зменшення кута нахилу неможливо припинити повністю, в результаті чого вихідний крутний момент знижується. Рішення, відповідне методу 3, реалізовується за допомогою об'єкта, визначеного в пункті 30 Формули винаходу. Об'єктом пункту 30 Формули винаходу є передавальний пристрій, переважно рушійний пристрій, що забезпечує обертання навколо щонайменше однієї вихідної осі, і цей передавальний пристрій, переважно рушійний пристрій, містить тіло, встановлене для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь передавального пристрою, переважно рушійного пристрою, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; засіб прикладання крутного моменту до тіла відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і засіб обмеження обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, причому передавальний пристрій виконаний такої конструкції, щоб зробити можливим з'єднання з тілом джерела рушійної енергії для приведення тіла у обертання навколо першої осі, при цьому обертання тіла навколо першої осі відбувається з кутовою швидкістю, яка перевищує критичну кутову швидкість, що забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна . кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі і/або третьої осі як згаданої щонайменше однієї вихідної осі; а також додатково містить один або більше датчиків для визначення значень одного або більше з наступних параметрів: обертання навколо першої осі і/або навколо другої осі, і/або навколо третьої осі, кутової швидкості обертання навколо першої осі і/або навколо другої осі, і/або навколо третьої осі, положення тіла 2 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 і/або першої осі, і/або другої осі, і/або третьої осі, крутного моменту при обертанні навколо першої осі і/або навколо другої осі, і/або навколо третьої осі, а також сили. Рішення, відповідне методу 4, реалізовується за допомогою об'єкта, визначеного в пункті 31 Формули винаходу. Об'єктом пункту 31 Формули винаходу є передавальний пристрій, переважно рушійний пристрій, що забезпечує обертання навколо щонайменше однієї вихідної осі, і цей передавальний пристрій, переважно рушійний пристрій, містить тіло, встановлене для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь передавального пристрою, переважно рушійного пристрою, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; засіб прикладання крутного моменту до тіла відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і засіб обмеження обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, причому передавальний пристрій виконаний такої конструкції, щоб зробити можливим з'єднання з тілом джерела рушійної енергії для приведення тіла у обертання навколо першої осі, при цьому обертання тіла навколо першої осі відбувається з кутовою швидкістю, яка перевищує критичну кутову швидкість, що забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі і/або третьої осі як згаданої щонайменше однієї вихідної осі; а також додатково містить засіб механічного обмеження обертання тіла навколо осі нахилу в обох напрямках в діапазоні між значенням нижнього граничного кута і значенням верхнього граничного кута і засіб регулювання цих значень граничних кутів підчас роботи передавального пристрою, переважно рушійного пристрою, до вибраного значення нижнього граничного кута більше 0 градусів і менше 90 градусів і значення верхнього граничного кута більше вибраного значення нижнього граничного кута і менше 90 градусів. Рішення, відповідне методу 5, реалізовується за допомогою об'єкта, визначеного в пункті 39 Формули винаходу. Об'єктом пункту 39 Формули винаходу є спосіб забезпечення обертання навколо щонайменше однієї вихідної осі, переважно навколо щонайменше однієї вихідної осі передавального пристрою, переважно рушійного пристрою, і цей спосіб включає наступні етапи: встановлюють тіло для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; приводять тіло у обертання навколо першої осі з кутовою швидкістю, що перевищує критичну кутову швидкість; прикладають до тіла крутний момент відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і обмежують обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, що забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі і/або третьої осі як згаданої щонайменше однієї вихідної осі; причому при виконанні способу використовують тіло з характерною критичною кутовою швидкістю менше 20000 обертів за хвилину, переважно з метою збільшення вихідної енергії на згаданій щонайменше одній вихідній осі, при цьому згадану характерну критичну кутову швидкість визначають таким чином: характерна критична кутова швидкість являє собою критичну кутову швидкість тіла, коли кут нахилу першої осі відносно другої осі дорівнює 45 градусам, коли перша вісь проходить, по суті, через центр маси тіла, коли тіло розташоване таким чином, щоб його момент інерції був, по суті, збільшений до максимуму, коли, при несиметричності тіла відносно площини, що проходить через його центр маси і ортогональна першій осі, з можливих положень при установці тіла на першій осі вибирають те, яке забезпечує меншу відстань між центром маси тіла і третьою віссю, і коли довжина з'єднувальної ланки становить: 5 мм, якщо маса тіла менше 0,1 кг, 25 мм, якщо маса тіла дорівнює або перевищує 0,1 кг, але менше 100 кг, 50 мм, якщо маса тіла дорівнює або перевищує 100 кг, але менше 1000 кг, і 100 мм, ' якщо маса тіла дорівнює або перевищує 1000 кг, при цьому згадана довжина з'єднувальної ланки являє собою відстань від точки перетину площини з'єднання і першої осі до третьої осі, при цьому згадана площина з'єднання являє собою площину, яка ортогональна першій осі, проходить через тіло і розташована на мінімальній відстані до осі нахилу. 3 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 Рішення, відповідне методу 6, реалізовується за допомогою об'єкта, визначеного в пункті 57 Формули винаходу. Об'єктом пункту 57 Формули винаходу є спосіб забезпечення обертання навколо щонайменше однієї вихідної осі, переважно навколо щонайменше однієї вихідної осі передавального пристрою, переважно рушійного пристрою, і цей спосіб включає наступні етапи: встановлюють тіло для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; приводять тіло у обертання навколо першої осі з кутовою швидкістю, що перевищує критичну кутову швидкість; прикладають до тіла крутний момент відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і обмежують обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, що забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі і/або третьої осі як згаданої щонайменше однієї вихідної осі; причому при виконанні способу крутний момент до тіла відносно третьої осі прикладають щонайменше частково за рахунок ваги тіла. Рішення, відповідне методу 7, реалізовується за допомогою об'єкта, визначеного в пункті 58 Формули винаходу. Об'єктом пункту 58 Формули винаходу є спосіб забезпечення обертання навколо щонайменше однієї вихідної осі, переважно навколо щонайменше однієї вихідної осі передавального пристрою, переважно рушійного пристрою, і цей спосіб включає наступні етапи: встановлюють тіло для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; приводять тіло у обертання навколо першої осі з кутовою швидкістю, що перевищує критичну кутову швидкість; прикладають до тіла крутний момент відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і обмежують обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, що забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі і/або третьої осі як згаданої щонайменше однієї вихідної осі; причому спосіб додатково включає етап, на якому вимірюють значення одного або більше з наступних параметрів: обертання навколо першої осі і/або навколо другої осі, і/або навколо третьої осі, кутової швидкості обертання навколо першої осі і/або навколо другої осі, і/або навколо третьої осі, положення тіла і/або першої осі, і/або другої осі, і/або третьої осі, крутного моменту при обертанні навколо першої осі і/або навколо другої осі, і/або навколо третьої осі, а також сили. Рішення, відповідне методу 8, реалізовується за допомогою об'єкта, визначеного в пункті 59 Формули винаходу. Об'єктом пункту 59 Формули винаходу є спосіб забезпечення обертання навколо щонайменше однієї вихідної осі, переважно навколо щонайменше однієї вихідної осі передавального пристрою, переважно рушійного пристрою, і цей спосіб включає наступні етапи: встановлюють тіло для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; приводять тіло у обертання навколо першої осі з кутовою швидкістю, що перевищує критичну кутову швидкість; прикладають до тіла крутний момент відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і обмежують обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, що забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі і/або третьої осі як згаданої щонайменше однієї вихідної осі; причому при виконанні способу механічним шляхом обмежують обертання тіла навколо осі нахилу в обох напрямках діапазоном між значенням нижнього граничного кута і значенням верхнього граничного кута і, при одночасному забезпеченні обертання під час роботи передавального пристрою, переважно рушійного пристрою, регулюють ці значення 4 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 граничних кутів до вибраного значення нижнього граничного кута більше 0 градусів і менше 90 градусів і значення верхнього граничного кута більше вибраного значення нижнього граничного кута нахилу і менше 90 градусів. Рішення, відповідне методу 9, реалізовується за допомогою об'єкта, визначеного в пункті 60 Формули винаходу. Об'єктом пункту 60 Формули винаходу є спосіб забезпечення обертання навколо щонайменше однієї вихідної осі, переважно навколо щонайменше однієї вихідної осі передавального пристрою, переважно рушійного пристрою, і цей спосіб включає наступні етапи: встановлюють тіло для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; приводять тіло у обертання навколо першої осі з кутовою швидкістю, що перевищує критичну кутову швидкість; прикладають до тіла крутний момент відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і обмежують обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, що забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі і/або третьої осі як згаданої щонайменше однієї вихідної осі; причому при виконанні способу вихідну енергію, створену на згаданій щонайменше одній вихідній осі, збільшують шляхом зменшення відстані між центром маси тіла і другою віссю. Рішення, відповідне методу 10, реалізовується за допомогою об'єкта, визначеного в пункті 61 Формули винаходу. Об'єктом пункту 61 Формули винаходу є спосіб забезпечення обертання навколо щонайменше однієї вихідної осі, переважно навколо щонайменше однієї вихідної осі передавального пристрою, переважно рушійного пристрою, і цей спосіб включає наступні етапи: встановлюють тіло для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; приводять тіло у обертання навколо першої осі з кутовою швидкістю, що перевищує критичну кутову швидкість; прикладають до тіла крутний момент відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і обмежують обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, що забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі і/або третьої осі як згаданої щонайменше однієї вихідної осі; причому при виконанні способу вихідну енергію, створену на згаданій щонайменше одній вихідній осі, збільшують шляхом зменшення варіації кута між нормальним вектором першої площини рами і нормальним вектором другої площини рами, де площина рами являє собою площину, що проходить через не лежачі на одній прямій три точки рами, всередині якої встановлений передавальний пристрій, переважно рушійний пристрій. Рішення, відповідне методу 11, реалізовується за допомогою об'єкта, визначеного в пункті 63 Формули винаходу. Об'єктом пункту 63 Формули винаходу є спосіб забезпечення обертання навколо щонайменше однієї вихідної осі, переважно навколо щонайменше однієї вихідної осі передавального пристрою, переважно рушійного пристрою, і цей спосіб включає наступні етапи: встановлюють тіло для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; приводять тіло у обертання навколо першої осі з кутовою швидкістю, що перевищує критичну кутову швидкість; прикладають до тіла крутний момент відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і обмежують обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, що забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі і/або третьої осі як згаданої щонайменше однієї вихідної осі; причому при виконанні способу вихідну енергію, створену на згаданій щонайменше 5 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 одній вихідній осі, збільшують шляхом зменшення варіації кута між вектором вихідної кутової швидкості руху навколо згаданої щонайменше однієї вихідної осі і нормальним вектором площини рами, де площина рами являє собою площину, що проходить через не лежачі на одній прямій три точки рами, всередині якої встановлений передавальний пристрій, переважно рушійний пристрій. Рішення, відповідне методу 12, реалізовується за допомогою об'єкта, визначеного в пункті 65 Формули винаходу. Об'єктом пункту 65 Формули винаходу є спосіб забезпечення обертання навколо щонайменше однієї вихідної осі, переважно навколо щонайменше однієї вихідної осі передавального пристрою, переважно рушійного пристрою, і цей спосіб включає наступні етапи: встановлюють тіло для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; приводять тіло у обертання навколо першої осі з кутовою швидкістю, що перевищує критичну кутову швидкість; прикладають до тіла крутний момент відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і обмежують обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, що забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі і/або третьої осі як згаданої щонайменше однієї вихідної осі; причому при виконанні способу вихідну енергію, створену на згаданій щонайменше одній вихідній осі, збільшують шляхом зменшення варіації кута між вектором кутової швидкості при обертальному русі тіла навколо першої осі і нормальним вектором площини тіла, де площина тіла являє собою площину, що проходить через не лежачі на одній прямій три точки тіла. Рішення, відповідне методу 13, реалізовується за допомогою об'єкта, визначеного в пункті 67 Формули винаходу. Об'єктом пункту 67 Формули винаходу є випробувальний пристрій, призначений для визначення параметрів конструкції і функціонування передавального пристрою, переважно рушійного пристрою, що містить вихідний вал, жорстко з'єднаний із зовнішнім тримачем; вісь власного обертання, яка являє собою вісь обертання тіла, яке з можливістю обертання встановлене у внутрішньому тримачі; і вісь нахилу, перпендикулярну вихідному валу, при цьому вісь власного обертання виконана з можливістю обертання, що забезпечує одержання кута нахилу між цією віссю і вихідним валом, вісь власного обертання об'єднана з тілом, і відносно осі нахилу прикладений крутний момент, причому випробувальний пристрій містить вихідну вісь, що являє собою подовжню вісь вертикально розташованого вихідного вала; вісь власного обертання, яка являє собою вісь обертання тіла і яка служить йому опорою; і вісь нахилу, яка перпендикулярна вихідній осі і виконана з можливістю повороту навколо осі власного обертання з одержанням кута нахилу між віссю власного обертання і вихідним валом, причому тіло можна встановлювати з ексцентриситетом відносно осі нахилу, що забезпечує одержання плеча довжиною 1>0. Рішення, відповідне методу 14, реалізовується за допомогою об'єкта, визначеного в пункті 68 Формули винаходу. Об'єктом пункту 68 Формули винаходу є спосіб визначення параметрів конструкції і функціонування передавального пристрою, переважно рушійного пристрою, що містить вихідний вал, жорстко з'єднаний із зовнішнім тримачем; вісь власного обертання, яка являє собою вісь обертання тіла, яке з можливістю обертання встановлене у внутрішньому тримачі; і вісь нахилу, перпендикулярну вихідному валу, при цьому вісь власного обертання виконана з можливістю обертання, що забезпечує одержання кута нахилу між цією віссю і вихідним валом, вісь власного обертання об'єднана з тілом, і відносноосі нахилу прикладений крутний момент, причому при виконанні цього способу використовують випробувальний пристрій за п. 67 і при виконанні цього способу встановлюють різні значення кутової швидкості тіла при його русі навколо осі власного обертання, причому для кожного з цих різних значень шляхом визначення напрямку обертання осі власного обертання відносно осі нахилу визначають, перевищує чи ні встановлена кутова швидкість критичну кутову швидкість. Рішення, відповідне методу 15, реалізовується за допомогою об'єкта, визначеного в пункті 69 Формули винаходу. Об'єктом пункту 69 Формули винаходу є передавальний пристрій, переважно рушійний пристрій, що забезпечує обертання навколо щонайменше однієї вихідної осі, і цей пристрій містить тіло, встановлене для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь являє собою згадану щонайменше одну вихідну вісь 6 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 згаданого пристрою, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; засіб прикладання крутного моменту до тіла відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і засіб обмеження обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, причому згаданий пристрій виконаний такої конструкції, щоб зробити можливим з'єднання з тілом джерела рушійної енергії для приведення тіла у обертання навколо першої осі, при цьому обертання тіла навколо першої осі відбувається з кутовою швидкістю, яка перевищує критичну кутову швидкість, що забезпечує постійний або зменшуваний кут нахилу, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі, при цьому при зменшенні кута нахилу як засіб обмеження використовують навантаження, прикладене до третьої осі, щоб зробити відбір енергії, виникаючої на третій осі. Рішення, відповідне методу 16, реалізовується за допомогою об'єкта, визначеного в пункті 70 Формули винаходу. Об'єктом пункту 70 Формули винаходу є спосіб забезпечення обертання навколо щонайменше однієї вихідної осі, і цей спосіб включає наступні етапи: встановлюють тіло для обертання навколо першої осі, обертання навколо другої осі і обертання навколо третьої осі, причому перша вісь розташована під кутом нахилу відносно другої осі, друга вісь і/або третя вісь являють собою згадану щонайменше одну вихідну вісь, при цьому обертання тіла навколо третьої осі спричиняє зміну кута нахилу; приводять тіло у обертання навколо першої осі з кутовою швидкістю, що перевищує критичну кутову швидкість; прикладають до тіла крутний момент відносно третьої осі в напрямку збільшення кута нахилу, коли перша вісь розташована під вибраним кутом нахилу відносно другої осі, який більше 0 градусів і менше 90 градусів; і обмежують обертання тіла навколо третьої осі в напрямку зменшення кута нахилу таким чином, щоб кут нахилу першої осі відносно другої осі залишався більше 0 градусів і менше 90 градусів, щоб в результаті виникали або збільшувалися вихідна кутова швидкість і/або вихідний крутний момент при обертанні тіла навколо другої осі, причому при виконанні способу проводять відбір енергії, виникаючої на третій осі, шляхом обмеження обертання тіла навколо третьої осі в напрямку зменшення кута нахилу, коли відбувається зменшення кута нахилу. Застосовно до методів 15 і 16 можна сказати наступне: коли пристрій працює в штатному режимі, вироблення енергії на третій осі забезпечується шляхом обмеження обертання тіла навколо третьої осі з використанням вихідного навантаження. У той час, коли енергія виробляється на третій осі, тіло обертається навколо третьої осі в напрямку зменшення кута нахилу. Цей спосіб можна використовувати, тільки якщо кут нахилу знаходиться між 0 градусів і 90 градусів. Для забезпечення безперервності виконання цього способу, необхідна наявність двох різних періодів. Перший період: на третій осі виробляється енергія шляхом обмеження обертання тіла навколо третьої осі з використанням вихідного навантаження. Другий період: кут нахилу збільшують шляхом обмеження обертання тіла навколо другої осі з використанням вихідного навантаження або гальмівного механізму. Шляхом послідовного повторення цих періодів в циклі (період 1, період 2, період 1, період 2, ...) забезпечується безперервність вироблення енергії в пристрої. Якщо для обмеження обертання тіла навколо другої осі використовується гальмівний механізм, енергія виробляється тільки на третій осі. Якщо замість гальмівного механізму для обмеження обертання тіла навколо другої осі використовується вихідне навантаження, енергія виробляється як на другій осі, так і на третій осі. Наприклад, якщо для обмеження обертання тіла навколо третьої осі використовується пневматичний насос, розташований між вихідним валом і внутрішнім тримачем, перший період має місце, коли на поршень насоса діє стиснення через обертання тіла навколо третьої осі в напрямку зменшення кута нахилу. У першому періоді повітря, яке знаходиться під тиском, передається на турбіну. У результаті за рахунок обертання турбіни виробляється енергія. Другий період має місце, коли на поршень діє розрідження за рахунок обмеження обертання тіла навколо другої осі з використанням гальмівного механізму або будь-якого обертового вихідного навантаження, наприклад, гідравлічного насоса. У цьому періоді повітря надходить до поршня насоса зовні. Цей період, крім того, вважається періодом впускання в насос. Даний передавальний пристрій, переважно рушійний пристрій, можна використовувати як передавальний пристрій і/або рушійний пристрій. У цьому контексті під «двигуном» не повинен розумітися двигун, що перетворює немеханічну енергію в механічну, наприклад, бензиновий або електричний двигун. У цьому випадку під «двигуном» повинен розумітися двигун, що перетворює механічну енергію в механічну енергію, аналогічно гідравлічному двигуну. При 7 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 використанні в цьому описі терміну «передавальний пристрій» він повинен сприйматися як такий, що включає в себе передавальний пристрій, переважно рушійний пристрій. Автори даного винаходу виявили, що, якщо накласти обмеження на обертання осі обертання тіла (яка нижче також називається першою віссю або віссю власного обертання) навколо: - другої осі, яка розташована під гострим кутом (який нижче також називається кутом нахилу) до осі обертання тіла, і - третьої осі (яка нижче також називається віссю нахилу), яка, по суті, перпендикулярна як першій, так і другій осі, то прикладання крутного моменту відносно осі нахилу в напрямку збільшення гострого кута приводить до обертання першої осі навколо другої осі. Якщо швидкість обертання тіла перевищує певне критичне значення, цей прикладений крутний момент приводить до виникнення реактивного крутного моменту, величина якого перевищує величину прикладеного крутного моменту і який також спрямований навколо осі нахилу, але в протилежний бік. Цей реактивний крутний момент приводить до обертання першої осі навколо осі нахилу в напрямку зменшення кута нахилу. Однак, якщо це обертання навколо осі нахилу обмежується, наприклад, за допомогою механічних засобів, то швидкість обертання тіла навколо другої осі збільшується, що приводить до виникнення корисного джерела рушійної енергії. Зрозуміло, що при такій системі засоби, що використовуються для обмеження обертання навколо осі нахилу, не вимагають джерела енергії, що підвищує ефективність передавального пристрою. Щоб зрозуміти ці явища, корисно розглянути наступні випадки (i)-(iv), коли тіло приводиться у обертання навколо першої осі з різними кутовими швидкостями: (і) У найпростішій ситуації, коли тіло взагалі не обертається навколо першої осі, прикладання крутного моменту відносно осі нахилу в напрямку підвищення величини гострого кута просто спричиняє відповідне обертання першої осі навколо осі нахилу в напрямку збільшення кута нахилу. (іі) Якщо тіло приведене у обертання з кутовою швидкістю (тобто швидкістю обертання), яка менше критичної кутової швидкості (тобто критичної швидкості обертання), мають місце два результуючих обертання першої осі: не тільки обертання першої осі відносно осі нахилу в напрямку збільшення кута нахилу, як у випадку (і) необертового тіла, але також і обертання першої осі навколо другої осі. Цей ефект відомий як прецесія. При збільшенні швидкості обертання тіла знижується швидкість обертання першої осі навколо осі нахилу, в той час як швидкість обертання першої осі навколо другої осі збільшується. (ііі) Якщо швидкість обертання тіла дорівнює критичній кутовій швидкості, як і раніше має місце обертання першої осі навколо другої осі, але більше немає будь-якого обертання першої осі навколо осі нахилу. (iv) Якщо тіло приводиться у обертання з кутовою швидкістю, що перевищує критичну кутову швидкість, то знов мають місце два обертання першої осі, тобто як навколо другої осі, так і навколо осі нахилу, але в цьому випадку обертання навколо осі нахилу відбувається в напрямку зменшення кута нахилу. Саме тоді, коли швидкість обертання тіла вище критичної кутової швидкості, передавальний пристрій здатний забезпечити корисну енергію обертального руху (тобто рушійну енергію) на другій осі і/або осі нахилу, кожна з яких або обидві разом можуть служити вихідними осями передавального пристрою. Якщо тіло приводиться у обертання навколо першої осі з кутовою швидкістю, що перевищує критичну кутову швидкість, то передавальний пристрій забезпечує вихідний рух (тобто обертання) навколо другої осі і/або вихідний рух (тобто обертання) навколо третьої осі. Кожне з двох обертань може характеризуватися відповідною кутовою швидкістю і відповідним крутним моментом. У випадку, коли тіло приводиться у обертання навколо першої осі з кутовою швидкістю, що перевищує критичну кутову швидкість, обертання тіла навколо третьої осі в напрямку зменшення кута нахилу також називається реактивним рухом. Кутова швидкість реактивного руху також називається реактивною швидкістю. Крутний момент реактивного руху також називається реактивним крутним моментом. Виявлено, що критична кутова швидкість тіла змінюється залежно від геометрії тіла, щільності матеріалу тіла, кута нахилу, величини крутного моменту, прикладеного до тіла відносно третьої осі, і умов навколишнього середовища, таких як температура навколишнього середовища і вологість. Автори даного винаходу виявили експериментальним шляхом, що вхідна рушійна енергія, яка подається в тіло для приведення його у обертання, використовується для вироблення вихідної рушійної енергії в формі обертання тіла навколо цієї вихідної осі з надзвичайно 8 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 високою ефективністю. Як наслідок, передавальний пристрій, створений відповідно до цього принципу, буде дуже корисним при застосуванні. Згадана щонайменше одна вихідна вісь являє собою другу вісь і/або третю вісь. Автори даного винаходу виявили, що при такій конфігурації ефективність передавального пристрою є надзвичайно високою. Більше того, засіб прикладання крутного моменту зручним чином працює як перемикач, який ініціює надання вихідної рушійної енергії. Засіб обмеження встановлений, щоб запобігти обертанню тіла навколо третьої осі в напрямку зменшення кута нахилу. Як згадано вище, оскільки засіб обмеження обертання не потрібно переміщувати, він може являти собою чисто механічний засіб, наприклад, стопор, який не вимагає джерела енергії, що сприяє забезпеченню високої ефективності передавального пристрою. Щоб привести тіло у обертання навколо першої осі зі швидкістю більше критичної кутової швидкості, з цим тілом може бути з'єднане джерело рушійної енергії. Як альтернатива, обертання тіла навколо осі власного обертання можна створювати вручну. Коли крутний момент прикладають до тіла відносно третьої осі, щоб збільшити кут нахилу, в самому тілі виникає поле сил. Наприклад, для циліндричного тіла товщиною dx поле сил за формою ідентичне полю сил, виникаючому в круглому поперечному перерізі стрижня, який гнуть. Це поле сил, спільно з обертанням тіла навколо першої осі, дає вихідний рух. Ефективність передачі визначається як ефективність перетворення руху, що забезпечується полем сил, у вихідний рух навколо другої осі. Збільшення ефективності передачі приводить до збільшення вихідного крутного моменту, тобто крутного моменту, виникаючого відносно вихідної осі, і до підвищення ефективності передавального пристрою. Ефективність передачі залежить як від міцності матеріалів, з яких виготовлені частини передавального пристрою, на які діють змінні сили (сили, напрямок дії яких на цю частину змінюється), так і міцності, що забезпечується за рахунок форми цих частин. Обертання тіла навколо третьої осі приводить до зміни кута нахилу. Це означає, що кут нахилу міняється, тобто збільшується або зменшується. Довжина з'єднувальної ланки визначена як відстань від точки перетину площини з'єднання і першої осі до третьої осі, переважно до центра шарніра, де перша вісь встановлена з можливістю повороту навколо другої осі. Існує нескінченна множина площин, які проходять через тіло і ортогональні осі власного обертання. З цих площин площиною з'єднання є та, яка має мінімальну відстань до третьої осі, переважно до центра шарніра. Щоб виміряти характерну критичну швидкість тіла, необхідно встановити тіло у випробувальний пристрій, відповідний методу 13 таким чином, щоб: - вісь власного обертання проходила через центр маси тіла, - вісь власного обертання була розташована таким чином, щоб момент інерції був збільшений до максимуму, і - якщо тіло не є симетричним відносно центральної площини (площини, що проходить через центр маси тіла і ортогональна першій осі), то з двох можливих положень при встановленні повинно використовуватися положення з меншою відстанню між центром маси тіла і третьою віссю, переважно центром шарніра. Додаткові переваги методів 1-14 забезпечуються при реалізації варіантів даного винаходу, вказаних в залежних пунктах. Що стосується методів 1 і 5, альтернативний шлях визначення характерної критичної кутової швидкості забезпечується при куті нахилу першої осі відносно другої осі, що дорівнює 80 градусів замість 45 градусів. Якщо сили тертя, протидіючі обертанню навколо осі 4 власного обертання, високі, таке розміщення під кутом 80 градусів допомагає, відповідно, збільшити і перевірити/підтвердити точність вимірювання характерної критичної кутової швидкості за рахунок зменшення міри передачі крутного моменту осі власного обертання на другу вісь, що зумовлено протидією сил тертя обертанню навколо осі власного обертання. Переважний варіант методів 1 і 5 реалізовується, якщо тіло має характерну критичну кутову швидкість менше 15000 обертів за хвилину. Інший переважний варіант методів 1 і 5 реалізовується, якщо тіло має характерну критичну кутову швидкість менше 10000 обертів за хвилину. Ще один переважний варіант методів 1 і 5 реалізовується, якщо тіло має характерну критичну кутову швидкість менше 5000 обертів за хвилину. Всі вказані діапазони значень характерної критичної кутової швидкості можуть бути реалізовані в будь-якому з пунктів Формули винаходу. Оскільки обов'язковим є, щоб під час роботи передавального пристрою швидкість власного обертання тіла була вище критичної швидкості, тіло з більш високим значенням характерної критичної швидкості повинно приводитися у обертання з більш високими швидкостями в 9 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 порівнянні з тілом, що має більш низьку характерну критичну швидкість. Обертання тіла з більш низькою швидкістю власного обертання є більш вигідним через те, що, як відомо, втрати на тертя (наприклад, опір повітря, тертя в підшипниках) збільшуються експонентно зі швидкістю власного обертання. Крім того, при більш високих швидкостях власного обертання в передавальному пристрої, переважно рушійному пристрої, потрібна більш висока міцність двигуна загалом, і це може привести до зростання витрат при виробництві передавального пристрою, переважно рушійного пристрою. Для тіл циліндричної форми з однаковою щільністю характерна критична кутова швидкість тіла збільшується по мірі зменшення відношення діаметра тіла до товщини (тобто висоти циліндра). Для двох різних тіл з однаковою масою, однаковою товщиною (тобто висотою) і однаковою щільністю, але з різною формою, а саме одного циліндричного, іншого в формі кільця, тіло в формі кільця має меншу критичну кутову швидкість. Тіло з великою масою і великим об'ємом може не мати високої характерної критичної кутової швидкості. Це означає, що не існує необхідної позитивної кореляції між параметром «характерна критична кутова швидкість тіла» і параметром «маса і об'єм тіла». Переважний варіант методів 1-4 реалізовується, якщо передавальний пристрій містить джерело рушійної енергії, яке з'єднане з тілом для приведення тіла у обертання навколо першої осі із згаданою кутовою швидкістю, що перевищує згадану критичну кутову швидкість. Переважний варіант методів 1-4 реалізовується, якщо передавальний пристрій містить засіб зворотного зв'язку, призначений для передачі рушійної енергії від руху тіла навколо згаданої щонайменше однієї вихідної осі в джерело рушійної енергії. При цьому можна подати зворотно в передавальний пристрій щонайменше частину вихідної енергії, що визначається як виробництво вихідного крутного моменту і вихідної швидкості обертання. Засіб зворотного зв'язку в переважному випадку призначений для передачі в джерело рушійної енергії рушійної енергії, достатньої для компенсації втрат енергії, виникаючих через тертя при обертанні тіла навколо першої осі в штатному режимі роботи. Штатний режим роботи визначається як стан, при якому постійними є кут нахилу, величина крутного моменту, прикладеного відносно третьої осі, і вихідна кутова швидкість руху навколо згаданої щонайменше однієї вихідної осі. Переважний варіант методів 1-4 реалізовується, якщо передавальний пристрій містить засіб керування джерелом рушійної енергії, що забезпечує обертання тіла навколо першої осі із згаданою швидкістю обертання, яка перевищує критичну кутову швидкість. Переважний варіант методів 1-4 реалізовується, якщо засіб прикладання крутного моменту призначений для додавання крутного моменту, коли вибраний кут нахилу знаходиться в межах діапазону від 10 градусів до 80 градусів. Засіб прикладання крутного моменту може містити пружину. У доповнення до цього або як альтернатива, засіб прикладання крутного моменту може містити одне або більше з наступного: гідравлічний циліндр, пневматичний циліндр, електромагнітний циліндр. Переважний варіант методів 1-4 реалізовується, якщо передавальний пристрій містить засіб керування величиною крутного моменту, що прикладається засобом прикладання крутного моменту. Переважний варіант методів 1-4 реалізовується, якщо засіб обмеження призначений для обмеження обертання тіла навколо третьої осі таким чином, щоб кут нахилу першої осі відносно другої осі був більше 10 градусів і менше 80 градусів. Виявлено, що існує оптимальний кут нахилу, який залежить від різних факторів, включаючи необхідний вихідний крутний момент передавального пристрою і необхідну вихідну кутову швидкість передавального пристрою. Наприклад, коли кут нахилу близький до 0 градусів, вихідний крутний момент на другій осі є мінімальним, а швидкість обертання другої осі є максимальною. І навпаки, коли кут нахилу близький до 90 градусів, вихідний крутний момент на другій осі є максимальним, а швидкість обертання другої осі є мінімальною. З того, що вихідна енергія передавального пристрою є добутком вихідного крутного моменту і вихідної швидкості обертання, випливає, що для підвищення вихідної енергії до максимуму буде необхідно вибрати кут нахилу, при якому добуток вихідного крутного моменту і вихідної швидкості обертання є максимальним. Тому переважний варіант методів 1-4 реалізовується, якщо передавальний пристрій додатково містить засіб регулювання, призначений для регулювання кута нахилу. У цьому випадку також можуть бути забезпечені засоби для вибору необхідної вихідної швидкості і/або необхідного вихідного крутного моменту передавального пристрою і регулювання кута нахилу, відповідно. 10 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 Переважний варіант методів 1-4 реалізовується, якщо передавальний пристрій містить засіб, який служить для вибору необхідної вихідної кутової швидкості передавального пристрою і викликає регулювання згаданим засобом регулювання кута нахилу залежно від вибраної вихідної кутової швидкості. Переважний варіант методів 1-4 реалізовується, якщо передавальний пристрій містить засіб, який служить для вибору необхідного вихідного крутного моменту і викликає регулювання згаданим засобом регулювання кута нахилу залежно від вибраного вихідного крутного моменту. Переважний варіант методів 1-4 реалізовується, якщо засіб обмеження призначений для запобігання обертанню тіла навколо третьої осі в напрямку зменшення кута нахилу. Засіб прикладання крутного моменту використовують для прикладання до тіла крутного моменту відносно осі нахилу з метою збільшення кута нахилу. У переважному випадку засіб прикладання крутного моменту дозволяє керувати величиною крутного моменту під час роботи передавального пристрою за допомогою блока керування. Якщо цим засобом прикладання крутного моменту, наприклад гідравлічним циліндром, керують з використанням відповідного блока керування, то засіб прикладання крутного моменту може додатково служити засобом обмеження, щоб обмежувати реактивний рух навколо осі нахилу і додатково регулювати кут нахилу до необхідної величини згідно з необхідними вихідною швидкістю руху і/або вихідним крутним моментом, і/або необхідними реактивною швидкістю/реактивним крутним моментом. Тобто, переважний варіант методів 1-4 реалізовується, якщо засіб прикладання крутного моменту додатково служить засобом обмеження. Згаданий засіб прикладання крутного моменту служить для прикладання крутного моменту до вала обертання і, таким чином, також до тіла, відносно третьої осі в напрямку збільшення кута нахилу. Згаданий засіб прикладання крутного моменту додатково може служити для запобігання обертанню тіла навколо осі нахилу в напрямку, протилежному напрямку прикладеного крутного моменту. Згаданий засіб прикладання крутного моменту може також служити для регулювання кута нахилу до необхідного значення, відповідного необхідним вихідній швидкості руху/вихідному крутному моменту і/або необхідним реактивній швидкості/реактивному крутного моменту. Для прикладання до тіла крутного моменту відносно осі нахилу в напрямку збільшення кута нахилу, для обмеження реактивного руху в напрямку зменшення кута нахилу і для регулювання кута нахилу до необхідного значення, відповідного необхідним вихідній швидкості руху/вихідному крутному моменту і/або необхідним реактивній швидкості/реактивному крутному моменту, роботою згаданого засобу прикладання крутного моменту керують за допомогою відповідного блока керування, в який подають вхідні сигнали від датчиків, наприклад, сигнали, що характеризують положення, рух, швидкість, дотикання, крутний момент і силу. Керуючі сигнали, згенеровані блоком керування у відповідь на вхідні сигнали, примушують засіб прикладання крутного моменту регулювати величину крутного моменту, прикладеного до тіла відносно осі нахилу, обмежувати реактивний рух і регулювати кут нахилу до необхідного значення. Переважний варіант методів 1-4 реалізовується, якщо засіб обмеження містить окремий упор. У переважному випадку, упор являє собою засіб, який може припинити обертання тіла навколо осі нахилу без витрачання енергії, наприклад, стопор або болт. Переважний варіант методів 1-4 реалізовується, якщо перша вісь проходить, по суті, через центр маси тіла, і тіло розташоване таким чином, щоб його момент інерції був, по суті, збільшений до максимуму. Перший переважний варіант методів 1-4 реалізовується, якщо перша і друга осі перетинаються. У переважному випадку будь-яка або обидві з цих осей проходять, по суті, через центр маси тіла. Зменшення відстані між центром маси тіла і другою віссю, а також підтримання на мінімально можливому рівні варіації цієї відстані збільшують вихідну енергію і підвищують ефективність. Коли друга вісь проходить через центр маси тіла, ефективність є максимальною, якщо розглядати як параметр тільки цю відстань. Другий, альтернативний переважний варіант методів 1-4 реалізовується, якщо перша і друга осі не перетинаються, в цьому випадку кут нахилу визначений як гострий кут між першою і другою осями, якщо дивитися в напрямку найкоротшого відрізка, що з'єднує першу і другу осі. Альтернативним методом вираження цього геометричного взаємозв'язку є розташування точки на першій осі і проведення уявної лінії, яка проходить через цю точку і паралельна другій осі. Тоді кут нахилу визначений як гострий кут, під яким перша вісь перетинається з цією уявною лінією. Переважний варіант методів 1-4 реалізовується, якщо тіло виконане такої форми, яка забезпечує виконання наступної умови: зміна в полі сил, виникаючому в тілі при додаванні 11 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 крутного моменту відносно третьої осі, є мінімальною у всьому 360-градусному діапазоні обертання тіла навколо першої осі. Переважний варіант методів 1-4 реалізовується, якщо тіло, по суті, має циліндричну симетрію відносно першої осі і може містити циліндр. Можливо, щоб тіло містило маточину, диск і кільцевий обід. У переважному випадку сумарна вага маточини і диска менша ваги обода. Переважний варіант методів 1-4 реалізовується, якщо один або більше наступних компонентів передавального пристрою виготовлені з матеріалу, який має великий модуль пружності: тіло, вал, на якому встановлене тіло, вихідний вал, що йде вздовж згаданої щонайменше однієї вихідної осі, частини передавального пристрою, на які діють змінні сили. Матеріал, що має великий модуль пружності, включає будь-який матеріал з модулем пружності вище 70 ГПа, переважно вище 100 ГПа. Використання матеріалів, що мають високий модуль пружності, для частин передавального пристрою, на які діють змінні сили (сили, напрямок дії яких на цю частину змінюється), підвищує ефективність передачі і, як наслідок, збільшує вихідний крутний момент і підвищує ефективність передавального пристрою. Використання для тіла матеріалу, що має високий модуль пружності, збільшує вихідний крутний момент і підвищує ефективність передавального пристрою. Використання для вала, на якому встановлене тіло, матеріалу, що має високий модуль пружності, збільшує вихідний крутний момент і підвищує ефективність передавального пристрою. Використання для вихідного вала матеріалу, що має високий модуль пружності, збільшує вихідний крутний момент і підвищує ефективність передавального пристрою. Використання для інших частин передавального пристрою, на які діють змінні сили (сили, напрямок дії яких на цю частину змінюється), матеріалу, що має високий модуль пружності, збільшує вихідний крутний момент і підвищує ефективність передавального пристрою. Матеріал тіла вибирається таким чином, щоб його щільність або розподіл щільності, відповідно, були придатними для забезпечення необхідної вихідної рушійної енергії передавального пристрою. Так, якщо потрібна велика вихідна рушійна енергія, може бути використаний такий матеріал з високою щільністю, як сталь. Однак може виявитися ускладненим і, отже, дорогим надання сталі необхідної форми, і тому при знижених вимогах до вихідної енергії як альтернативу можна використовувати термопластичні матеріали. При використанні передавального пристрою через наявність всередині нього незбалансованих сил можуть виникнути небажані вібрації, що є результатом недостатньої симетричності компонентів передавального пристрою відносно згаданої щонайменше однієї вихідної осі і/або наявності компонента реактивного крутного моменту, який спрямований перпендикулярно згаданій щонайменше одній вихідній осі. Ця проблема може бути вирішена шляхом встановлення/фіксації передавального пристрою за допомогою засобів встановлення передавального пристрою, в переважному випадку шляхом жорсткого встановлення передавального пристрою на нерухомій опорі. Ця нерухома опора може являти собою одне або більше з наступного: землю, підлогу, стіну, перекриття, корпус, контейнер, інший тип опори, наприклад стояк, раму або каркас. Переважний варіант методів 1-4 реалізовується, якщо для обертання навколо другої осі встановлені одна або більше противаг. Противаги можуть бути призначені для компенсації, щонайменше часткової, цих незбалансованих сил шляхом зменшення несиметричності і забезпечення відцентрової сили, яка зрівноважує реактивний крутний момент. Обертання тіла навколо першої осі представлене вектором, який називається вектором власного обертання. Вектор власного обертання ідентичний вектору кутової швидкості, пов'язаному з кутовим рухом тіла навколо першої осі. Під час обертання тіла навколо першої осі, якщо до нього прикладається крутний момент в напрямку збільшення кута нахилу, то тіло починає обертатися також і навколо другої осі. Це обертання тіла навколо другої осі представлене вектором, який називається нижче вектором вихідного руху. Вектор вихідного руху ідентичний вектору кутової швидкості, пов'язаному з кутовим рухом тіла навколо другої осі. Під час виготовлення передавального пристрою кут між вектором крутного моменту, прикладеного до тіла відносно третьої осі (тобто вектором прикладеного крутного моменту ), і вектором вихідного руху може не становити 90 градусів через виробничі допуски. Якщо кут між вектором прикладеного крутного моменту і вектором вихідного руху близький до 90 градусів, вихідна енергія на другій осі збільшується і ефективність передавального пристрою підвищується. Вихідна енергія і ефективність збільшуються до максимуму, якщо цей кут становить 90 градусів, якщо розглядати як параметр тільки цей кут. Переважний варіант методів 1-4 реалізовується, якщо передавальний пристрій містить засіб регулювання, призначений для регулювання крутного моменту, прикладеного до тіла відносно третьої осі. 12 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 Щоб зменшити складність блока керування двигуна, для прикладання крутного моменту в напрямку збільшення кута нахилу, для обмеження реактивного руху в напрямку зменшення кута нахилу і для регулювання кута нахилу до необхідного значення згідно з необхідними вихідною швидкістю руху/вихідним крутним моментом і/або необхідними реактивною швидкістю/реактивним крутним моментом, можна використовувати багатофункціональний механізм. Багатофункціональний механізм містить засіб прикладання крутного моменту відносно осі нахилу, засіб механічного обмеження обертання тіла навколо осі нахилу в обох напрямках між значеннями нижнього і верхнього граничних кутів і засіб регулювання значень цих кутів під час роботи двигуна до вибраного значення нижнього граничного кута між 0 і 90 градусами (0 і 90 градусів не включені) і значення верхнього граничного кута, що знаходиться між вибраним значенням нижнього граничного кута і 90 градусами. Багатофункціональний механізм в переважному випадку містить датчики визначення сили, крутного моменту, положення, руху, швидкості і дотикання. Переважний варіант методів 1-4 реалізовується, якщо засіб обмеження, призначений для механічного обмеження обертання тіла навколо осі нахилу в обох напрямках, являє собою щонайменше один упор. Іншим підходом, який може бути використаний або сам по собі, або в комбінації з одним або обома з розглянутих вище рішень для зменшення небажаних вібрацій, виникаючих через незбалансовані сили, буде забезпечення множини передавальних пристроїв, які можуть бути встановлені разом і можуть приводитися в дію, по суті, з однаковою частотою, але з різними відповідними фазами. У цьому випадку будь-які такі вібрації знижуються до мінімуму, якщо фази передавальних пристроїв розташовані на рівних інтервалах одна від одної. Так, для системи з чотирьох передавальних пристроїв фазами будуть 0 градусів, 90 градусів, 180 градусів і 270 градусів. Таким чином, даний винахід розповсюджується на вузол з передавальних пристроїв розглянутого вище типу в комбінації з засобами приведення кожного передавального пристрою у обертання, по суті, з однаковою частотою, але з різними кутами відповідних фаз, і в комбінації з засобами об'єднання вихідної рушійної енергії передавальних пристроїв. У такому випадку переважною кількістю передавальних пристроїв є чотири, і передавальні пристрої в переважному випадку можуть бути встановлені в масив 22. Коли використовується система з більше ніж одного передавального пристрою, для кожної пари передавальних пристроїв підтримання на мінімально можливому рівні варіації кута між векторами вихідного руху цих пристроїв під час їх роботи збільшує вихідну енергію і підвищує ефективність. Коли використовується система з більше ніж одного передавального пристрою, для щонайменше однієї пари передавальних пристроїв варіація кута між векторами вихідного руху передавальних пристроїв в переважному випадку становить менше 5 градусів під час роботи передавального пристрою. Коли використовується система з більше ніж одного передавального пристрою, для кожної пари передавальних пристроїв підтримання на мінімально можливому рівні відстані між центрами маси цих пристроїв під час їх роботи збільшує вихідну енергію і підвищує ефективність. Даний винахід розповсюджується на транспортний засіб, що приводиться в дію вихідною рушійною енергією передавального пристрою або вузла передавальних пристроїв, який визначений вище, наприклад, дорожній транспортний засіб, повітряне судно або плавучий транспортний засіб. Даний винахід додатково розповсюджується на генератор електрики, що приводиться в дію вихідною рушійною енергією передавального пристрою або вузла передавальних пристроїв, який визначений вище. Переважний варіант методів 1-4 реалізовується за рахунок передавального пристрою, переважно рушійного пристрою, який містить другу вісь, що є віссю обертання другої опори, виконаною з можливістю обертання; першу вісь, що є віссю обертання тіла, яке з можливістю обертання встановлене на першій опорі, виконаній з можливістю обертання, причому перша вісь виконана з можливістю обертання для одержання кута нахилу між цією віссю і другою віссю; вісь нахилу, перпендикулярну згаданій другій осі, причому до першої осі прикладають крутний момент відносно осі нахилу в напрямку збільшення кута нахилу; і засіб обмеження, призначений для обмеження обертання навколо осі нахилу в напрямку зменшення кута нахилу, причому тіло приводять у обертання з кутовою швидкістю, що перевищує критичну кутову швидкість, яка забезпечує зменшення кута нахилу, при цьому згадана друга вісь жорстко 13 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 з'єднана з другою опорою і/або згадана вісь нахилу являє собою щонайменше одну вихідну вісь. Оскільки через інерцію тіла має місце затримка між моментом часу прикладання крутного моменту відносно третьої осі і моментом часу, коли прикладання крутного моменту відносно третьої осі забезпечує необхідну швидкість обертання першої осі навколо згаданої щонайменше однієї вихідної осі передавального пристрою, в деяких ситуаціях було б вигідно зменшувати цю затримку за часом, створюючи додатковий, зовнішній крутний момент, діючий на тіло відносно другої осі передавального пристрою, щоб ініціювати або прискорити це обертання першої осі навколо згаданої щонайменше однієї вихідної осі передавального пристрою. Тому переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає створення додаткового, зовнішнього крутного моменту, діючого на тіло відносно другої осі, з метою забезпечення первинного прискорення. Прикладання додаткового, зовнішнього крутного моменту до тіла відносно згаданої щонайменше однієї вихідної осі передавального пристрою забезпечує первинне прискорення тіла відносно згаданої щонайменше однієї вихідної осі передавального пристрою. Це може бути досягнуто, наприклад, шляхом фізичного приведення у обертання вихідного вала передавального пристрою або вручну, або за допомогою додаткового двигуна. Переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає керування джерелом рушійної енергії з метою приведення тіла у обертання навколо першої осі із згаданою кутовою швидкістю, що перевищує критичну кутову швидкість тіла. Переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає вибір кута нахилу більше 10 градусів і менше 80 градусів, причому цей кут нахилу являє собою згаданий вибраний кут нахилу. Переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає керування величиною крутного моменту, прикладеного до тіла відносно третьої осі. Переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає обмеження обертання тіла навколо третьої осі таким чином, щоб кут нахилу першої осі відносно другої осі був більше 10 градусів і менше 80 градусів. Переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає регулювання кута нахилу. Можливо, щоб спосіб додатково включав створення необхідної вихідної кутової швидкості руху навколо однієї з множини згаданих вихідних осей, що містить щонайменше одну вихідну вісь, шляхом регулювання кута нахилу. Так, після вибору необхідної вихідної швидкості руху навколо однієї з множини згаданих вихідних осей, що містить щонайменше одну вихідну вісь, тобто вибору необхідної вихідної швидкості руху навколо другої осі або навколо третьої осі, кут нахилу регулюють залежно від вибраної вихідної швидкості. Також можливо, щоб спосіб додатково включав створення необхідного вихідного крутного моменту відносно однієї з множини згаданих вихідних осей, що містить щонайменше одну вихідну вісь, шляхом регулювання кута нахилу. Так, після вибору необхідного вихідного крутного моменту відносно однієї з множини згаданих вихідних осей, що містить щонайменше одну вихідну вісь, тобто вибору необхідного вихідного крутного моменту відносно другої осі або відносно третьої осі, кут нахилу регулюють залежно від вибраного вихідного крутного моменту. Переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає регулювання швидкості руху тіла навколо першої осі. Можливо, щоб спосіб додатково включав створення необхідної вихідної кутової швидкості руху навколо однієї з множини згаданих вихідних осей, що містить щонайменше одну вихідну вісь, шляхом регулювання кутової швидкості руху тіла навколо першої осі. Так, після вибору необхідної вихідної швидкості руху навколо однієї з множини згаданих вихідних осей, що містить щонайменше одну вихідну вісь, тобто вибору необхідної вихідної швидкості руху навколо другої осі або навколо третьої осі, швидкість руху тіла навколо першої осі регулюють залежно від вибраної вихідної швидкості. Також можливо, щоб спосіб додатково включав створення необхідного вихідного крутного моменту відносно однієї з множини згаданих вихідних осей, що містить щонайменше одну вихідну вісь, шляхом регулювання кутової швидкості руху тіла навколо першої осі. Так, після вибору необхідного вихідного крутного моменту відносно однієї з множини згаданих вихідних осей, що містить щонайменше одну вихідну вісь, тобто вибору необхідного вихідного крутного моменту відносно другої осі або відносно третьої осі, швидкість руху тіла навколо першої осі регулюють залежно від вибраного вихідного крутного моменту. Переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає регулювання крутного моменту, прикладеного до тіла відносно третьої осі. Можливо, щоб спосіб додатково включав створення необхідної вихідної кутової швидкості руху навколо однієї з 14 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 множини згаданих вихідних осей, що містить щонайменше одну вихідну вісь, шляхом регулювання крутного моменту, прикладеного до тіла відносно третьої осі. Так, після вибору необхідної вихідної швидкості руху навколо однієї з множини згаданих вихідних осей, що містить щонайменше одну вихідну вісь, тобто вибору необхідної вихідної швидкості руху навколо другої осі або навколо третьої осі, крутний момент, прикладений до тіла відносно третьої осі, регулюють залежно від вибраної вихідної швидкості. Також можливо, щоб спосіб додатково включав створення необхідного вихідного крутного моменту відносно однієї з множини згаданих вихідних осей, що містить щонайменше одну вихідну вісь, шляхом регулювання крутного моменту, прикладеного до тіла відносно третьої осі. Так, після вибору необхідного вихідного крутного моменту відносно однієї з множини згаданих вихідних осей, що містить щонайменше одну вихідну вісь, тобто вибору необхідного вихідного крутного моменту відносно другої осі або відносно третьої осі, крутний момент, прикладений до тіла відносно третьої осі, регулюють залежно від вибраного вихідного крутного моменту. Переважний варіант методів 5-12 реалізовується, якщо обмеження обертання тіла навколо третьої осі додатково включає запобігання обертанню тіла навколо третьої осі в напрямку зменшення кута нахилу. Переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає використання деякої кількості створеної енергії обертального руху для забезпечення обертання тіла навколо першої осі в штатному режимі роботи. При цьому кількості енергії, що використовується, таким чином в переважному випадку достатньо для компенсації втрат енергії, виникаючих через тертя при обертанні тіла навколо першої осі. Збільшення жорсткості рами приводить до збільшення вихідної енергії і підвищує ефективність. Площина рами визначена як площина, що проходить через будь-які три точки рами, не лежачі на одній прямій. Для всіх можливих пар площин рами підтримання під час роботи передавального пристрою на мінімально можливому рівні варіації кута між нормальним вектором першої площини і нормальним вектором другої площини збільшує вихідну енергію і підвищує ефективність, якщо розглядати як параметр тільки цей кут. Так, переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає підтримання варіації кута між нормальним вектором першої площини і нормальним вектором другої площини на рівні менше 5 градусів. Зменшення коливань вихідного вала відносно рами під час роботи передавального пристрою збільшує вихідну енергію і підвищує ефективність. Для всіх можливих площин рами підтримання під час роботи передавального пристрою на мінімально можливому рівні варіацій кута між вектором вихідного руху і нормальним вектором площини рами збільшує вихідну енергію і підвищує ефективність. Для всіх можливих площин рами, якщо кут між вектором вихідного руху і нормальним вектором площини рами не змінюється під час роботи передавального пристрою, то ефективність є максимальною, якщо розглядати як параметр тільки цей кут. Таким чином, переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає підтримання варіації кута між вектором вихідної кутової швидкості руху навколо згаданої щонайменше однієї вихідної осі і нормальним вектором площини рами на рівні менше 5 градусів. Переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає підтримання варіації кута між вектором кутової швидкості при кутовому русі тіла навколо першої осі і нормальним вектором площини тіла на рівні менше 5 градусів. Для способу забезпечення обертання, відповідного даному винаходу, важливо враховувати кутову швидкість, звану «критичною вихідною швидкістю» руху навколо другої осі. Важливість критичної вихідної швидкості руху навколо другої осі усвідомлюється, коли до вихідного вала, що йде вздовж другої осі, приєднується навантаження. Якщо опір навантаження, приєднаного до вихідного вала, що йде вздовж другої осі, спричиняє зниження швидкості вихідного руху навколо другої осі нижче критичної вихідної швидкості руху навколо другої осі, то реактивний крутний момент зникає і ефективність двигуна гіршає. Критичну вихідну швидкість руху навколо другої осі можна порівняти зі швидкістю холостого ходу автомобільного двигуна. «Критична вихідна швидкість» руху навколо другої осі може бути визначена таким чином: 1. Привести тіло у обертання навколо першої осі з кутовою швидкістю, що перевищує критичну кутову швидкість, поки не виникне реактивний руху. 2. Шляхом гальмування перешкоджати обертанню тіла навколо другої осі доти, поки реактивний рух не припиниться. Швидкість руху навколо другої осі в момент, коли припиняється реактивний рух, називається критичною вихідною швидкістю руху навколо другої осі. Критична вихідна швидкість руху навколо другої осі міняється із зміною швидкості власного обертання, тобто кутової швидкості руху тіла навколо першої осі, величини прикладеного 15 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 крупного моменту і кута нахилу. Інші параметри, які впливають, включають конструкцію системи і умови навколишнього середовища. Ефективність передачі також залежить від згинання тіла відносно першої осі під час роботи передавального пристрою. Площина тіла визначена як площина, яка проходить через будь-які три точки тіла, не лежачі на одній прямій. Для всіх можливих площин тіла підтримання під час роботи на мінімально можливому рівні варіації кута між вектором власного обертання і нормальним вектором площини тіла збільшує вихідну енергію і підвищує ефективність. Для всіх можливих площин тіла, якщо кут між вектором власного обертання і нормальним вектором площини тіла не змінюється під час роботи передавального пристрою, то ефективність є максимальною, якщо розглядати як параметр тільки цей кут. Переважний варіант методів 5-12 реалізовується, якщо спосіб додатково включає наступний етап: регулюють крутний момент, прикладений до тіла відносно другої осі, таким чином, щоб забезпечувався постійний або зменшуваний кут нахилу. Іншими словами, величину крутного моменту, прикладеного відносно другої осі, наприклад, за допомогою навантаження на вихідному валу, що йде вздовж другої осі, вибирають таким чином, щоб забезпечувався постійний або зменшуваний кут нахилу, тобто, щоб величина реактивного крутного моменту дорівнювала або перевищувала величину крутного моменту, прикладеного до тіла відносно третьої осі. Зменшення опору тертю в передавальному пристрої підвищує ефективність. Наприклад, використання магнітних підшипників і/або використання мастильних засобів, таких як масло або консистентне мастило, для змащування підшипників і/або розміщення передавального пристрою у вакуумній посудині зменшують опір тертю. Оскільки енергія, утворювана передавальним пристроєм, є добутком вихідного крутного моменту і вихідної швидкості руху або добутком реактивного крутного моменту і реактивної швидкості, то для збільшення цієї енергії до максимуму буде необхідно вибрати такі швидкість власного обертання навколо першої осі, величину прикладеного крутного моменту відносно третьої осі і кут нахилу, при яких добуток вихідного крутного моменту і вихідної швидкості руху або добуток реактивного крутного моменту і реактивної швидкості є максимальним. Переважний варіант методів 1-4 реалізовується, якщо передавальний пристрій додатково містить засіб регулювання швидкості власного обертання, засіб регулювання прикладеного крутного моменту і засіб регулювання кута нахилу. У цьому випадку можуть бути забезпечені засоби для вибору необхідної вихідної швидкості руху і/або необхідного вихідного крутного моменту передавального пристрою і регулювання швидкості власного обертання, прикладеного крутного моменту і кута нахилу, відповідно. Крім того, можуть бути забезпечені засоби для вибору необхідної реактивної швидкості і/або необхідного реактивного крутного моменту передавального пристрою і регулювання швидкості власного обертання, прикладеного крутного моменту і кута нахилу, відповідно. Переважний варіант методу 13 реалізовується, якщо тіло може бути з'єднане з окремим двигуном, який забезпечує обертання, і від'єднане від окремого двигуна, який забезпечує обертання. Переважний варіант методу 13 реалізовується, якщо випробувальний пристрій містить засіб зчленування для створення з'єднання між тілом і окремим двигуном, що забезпечує обертання, причому засіб зчленування виконаний як роз'ємний. Переважний варіант методу 13 реалізовується, якщо тіло на тимчасовій основі приводять в дію за допомогою окремого двигуна, що забезпечує обертання, переважно на первинному етапі. Переважний варіант методу 13 реалізовується, якщо випробувальний пристрій містить один або більше засобів вимірювання, призначених для визначення одного або більше наступних параметрів: кутової швидкості руху тіла навколо осі власного обертання, напрямку обертання тіла навколо осі власного обертання, кутової швидкості вихідного вала, напрямку обертання вихідного вала, кутової швидкості руху навколо осі нахилу, напрямку обертання навколо осі нахилу, зміни у часі одного або більше перерахованих параметрів. Переважний варіант методу 13 реалізовується, якщо тіло може бути замінене для варіювання одного або більше наступних параметрів тіла: маси, геометрії, модуля пружності, моменту інерції, розподілу щільності. Переважний варіант методу 13 реалізовується, якщо можна змінювати положення тіла на осі власного обертання. Переважний варіант методу 13 реалізовується, якщо можна змінювати положення тіла з точки зору створення плеча. 16 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 Переважний варіант методу 13 реалізовується, якщо випробувальний пристрій містить засіб обмеження, призначений для обмеження руху осі власного обертання навколо осі нахилу при остаточному куті нахилу. Переважний варіант методу 13 реалізовується, якщо випробувальний пристрій містить засіб вимірювання сили, призначений для вимірювання сили, діючої з боку засобів, що забезпечують опору для тіла, при остаточному куті нахилу. Переважний варіант методу 13 реалізовується, якщо засіб обмеження містить стопор, встановлений на вихідному валу або засобі, що забезпечує опору для тіла, і працюючий спільно з вихідним валом і/або засобом, який забезпечує опору для тіла. Переважний варіант методу 13 реалізовується, якщо випробувальний пристрій містить засіб прикладання крутного моменту відносно осі нахилу, причому прикладений крутний момент не залежить від маси тіла. Термін «тримач», відповідний методам 13 і 14, використовується для позначення будь-якого типу опорних пристроїв, що забезпечують опору для тіла, наприклад рамок. Переважний варіант методу 14 реалізовується, якщо спосіб додатково включає визначення кутової швидкості при русі тіла навколо осі власного обертання, коли обертання осі власного обертання навколо осі нахилу відсутнє, причому визначена таким чином кутова швидкість являє собою критичну кутову швидкість. Переважний варіант методу 14 реалізовується, якщо спосіб додатково включає визначення критичної кутової швидкості руху тіла для різних значень одного або більше наступних параметрів: плеча, первинного кута нахилу осі власного обертання. Переважний варіант методу 14 реалізовується, якщо спосіб додатково включає визначення відношення кутової швидкості руху тіла навколо осі власного обертання до кутової швидкості вихідного вала залежно від різних параметрів, зокрема від первинного або остаточного кута нахилу. Ці, а також додаткові особливості і переваги винаходу будуть краще зрозумілі при прочитанні наведеного далі докладного опису зразкових варіантів його реалізації, що є в цей час переважними, разом з супроводжуючими кресленнями, з яких: фіг. 1 - схематично показаний загальний вигляд передавального пристрою, відповідного до переважного варіанта реалізації даного винаходу; фіг. 2 - схема, що ілюструє відносне розташування осей обертання компонентів передавального пристрою, показаного на фіг. 1; фіг. 3 - схема, що ілюструє напрямок, в якому прикладають крутний момент, щоб забезпечити вихідну рушійну енергію передавального пристрою, показаного на фіг. 1; на фіг. 4 наведена схема альтернативного прикладання крутного моменту; на фіг. 5 показаний один з варіантів випробувального пристрою; на фіг. 6 показаний інший варіант випробувального пристрою; на фіг. 7 в збільшеному масштабі наведений один з варіантів засобу обмеження, показаного на фіг. 6; на фіг. 8 наведений другий варіант засобу обмеження; на фіг. 9 наведений третій варіант засобу обмеження; на фіг. 10 показаний один з варіантів масиву передавальних пристроїв; на фіг. 11 показане поле сил; на фіг. 12 наведена векторна діаграма; і на фіг. 13 показана довжина з'єднувальної ланки для тіла. Якщо звернутися до фіг. 1, передавальний пристрій 1 містить тіло 2 у вигляді монолітного циліндричного маховика, який встановлений на валу 3 обертання співвісно йому для спільного обертання навколо першої осі 4. Вал 3 обертання встановлений всередині внутрішнього тримача 5 за допомогою внутрішніх підшипників 6. Внутрішній тримач 5 встановлений всередині зовнішнього тримача 7 для обмеженого обертання цього тримача 5 навколо осі 16 нахилу за допомогою зовнішніх підшипників 8, при цьому другий тримач 7, в свою чергу, встановлений всередині рами 9 на підшипниках 10 рами таким чином, що він може обертатися відносно рами 9 навколо другої осі 11, що являє собою вихідну вісь передавального пристрою 1. В доповнення до другої осі 11 або замість неї вихідною віссю передавального пристрою 1 є вісь 16 нахилу. Вал 3 обертання маховика 2 приводять у обертання навколо першої осі 4 за допомогою електродвигуна 12 або будь-якого іншого джерела вхідної рушійної енергії. Електродвигун 12 може живитися від акумуляторної батареї. Вал 3 обертання встановлений під кутом нахилу відносно другої осі 11 передавального пристрою 1, при цьому кут нахилу більше 0 градусів і менше 90 градусів. 17 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 Це краще видно на фіг. 2. Вісь обертання маховика 2 співпадає з першою віссю 4. Маховик 2 встановлений таким чином, щоб перша вісь 4 і друга вісь 11 перетиналися в центрі маси CM маховика 2. Щоб проілюструвати більш зрозуміло положення маховика 2 в просторі, на фіг. 2 зображена площина 13, в якій лежать друга вісь 11 і вісь 16 нахилу, крім того, просто для ілюстрації відносного розташування осей 4, 11, 16 показані три вектори, що проходять в напрямках тривимірної прямокутної системи координат. У передавальному пристрої 1, показаному на фіг. 1, для прикладання до вала 3 обертання, а за рахунок цього також і до маховика 2, крутного моменту відносно третьої осі 16 (визначеної як вісь нахилу, перпендикулярна як першій осі 4, так і другій осі 11) служить гідравлічний циліндр 15. Крутний момент, що прикладається циліндром 15, спрямований у бік збільшення кута нахилу. Прикладений крутний момент спричиняє обертання першої осі 4 навколо другої осі 11 передавального пристрою 1. Гідравлічний циліндр 15 додатково служить для запобігання обертанню першої осі 4 навколо осі 16 нахилу в бік, протилежний напрямку прикладеного крутного моменту, тобто із зменшенням кута нахилу. При роботі передавального пристрою 1 маховик 2 спочатку приводиться у обертання навколо першої осі 4, поки його кутова швидкість не перевищить попередньо визначеного критичного значення с. Після чого приводиться в дію гідравлічний циліндр 15, щоб опосередковано, через внутрішні підшипники 6 і вал 3 обертання, прикласти до маховика 2 крутний момент відносно осі 16 нахилу і в напрямку збільшення кута нахилу. Це спричиняє обертання першої осі 4 навколо вихідної осі 11. Однак, через обертання маховика 2 з кутовою швидкістю вище попереднього визначеного критичного значення с навколо першої осі 4, виникає реактивний крутний момент, компонент якого також діє відносно осі 16 нахилу, але в протилежний бік, тобто в напрямку зменшення кута нахилу. Цей реактивний крутний момент приводить до обертання першої осі 4 навколо осі 16 нахилу в напрямку зменшення кута нахилу. Однак це переміщення тоді запобігає гідравлічному циліндру 15, який діє як упор, перешкоджаючий обертанню вала 3 обертання. У результаті збільшуються швидкість spin обертання маховика 2, швидкість обертання вала 3 обертання, швидкість обертання першого тримач 5 і швидкість out обертання другого тримача 7 навколо другої осі 11, що являє собою вихідну вісь. На цій стадії до цієї вихідної осі передавального пристрою 1 можна приєднати навантаження. Роботою гідравлічного циліндра 15 керує блок 17 керування, в який надходять сигнали від датчика (не показаний), встановленого на гідравлічному циліндрі 15. Керуючі сигнали, згенеровані блоком 17 керування у відповідь на сигнали положення, змінюють гідравлічний тиск в гідравлічному циліндрі 15, щоб повернути внутрішній тримач 5 відносно зовнішнього тримача 7 на необхідний кут нахилу. Блок 17 керування забезпечує керуючі сигнали для керування швидкістю обертання маховика 2, кутом нахилу і величиною прикладеного крутного моменту. Як указано вище, кутом нахилу керують за допомогою гідравлічного циліндра 15. За рахунок керування цими параметрами можна керувати вихідною швидкістю spin обертання передавального пристрою 1. Для подачі частини вихідної рушійної енергії, виникаючої на другій осі 11, зворотно в електродвигун 12, можна використовувати механізм зворотного зв'язку у вигляді ременя 18, генератора 19 змінного струму, електропроводки 20 і блока 17 керування. Орієнтація осі 16 нахилу, відносно якої прикладають крутний момент, і напрямок крутного моменту показані на фіг. 3, де можна бачити, що маховик 2 обертається навколо першої осі 4, яка знаходиться під кутом нахилу відносно другої (тобто вихідної) осі 11. Крутний момент, що прикладається гідравлічним циліндром 15, діє в напрямку, вказаному стрілками 21, а реактивний крутний момент виникає в напрямку, вказаному стрілкою 22. Хоча в переважному варіанті реалізації даного винаходу перша вісь 4 і друга вісь 11 перетинаються в центрі маси CM маховика 2, можливі альтернативні конфігурації, при яких перша вісь 4 і друга вісь 11 не перетинаються, в цьому випадку через центр маси CM маховика 2 може проходити або перша вісь 4, або друга вісь 11, або жодна з першої і другої осей 4 і 11 через нього не проходять. Хоча в зображеному передавальному пристрої 1, відповідному переважному варіанту реалізації даного винаходу, його вихідна вісь 11 розташована горизонтально, зрозуміло, що передавальний пристрій 1 буде функціонувати, коли його вихідна вісь 11 має будь-яку необхідну орієнтацію. 18 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 Щоб визначити і оцінити, відповідно, параметри конструкції і функціонування передавального пристрою, описаного раніше з використанням фіг. 1-3, був розроблений випробувальний пристрій. Конструкція цього випробувального пристрою і його принцип дії показані на фіг. 4. Істотною особливістю цієї схеми є те, що крутний момент прикладають до осі 16 нахилу за допомогою встановленого з ексцентриситетом тіла 2, наприклад монолітного циліндричного маховика масою т, і що не потрібно зовнішнього пристрою для прикладання крутного моменту, наприклад, циліндра 15, показаного на фіг. 1. Схема, показана на фіг. 4, є модифікацією і спрощенням схеми передавального пристрою, показаного на фіг. 3, оскільки не потрібно зовнішнього пристрою для прикладання крутного моменту. Іншою значущою особливістю схеми, показаної на фіг. 4, є засіб обмеження, призначений для обмеження обертання осі 4 власного обертання навколо осі 16 нахилу. Випробувальний пристрій може бути розроблений в різних варіантах. Два різних варіанти випробувального пристрою показані на фіг. 5 і фіг. 6, які далі розглянуті більш детально. Задачею випробувального пристрою є забезпечення можливості варіювання одних параметрів при одночасному вимірюванні інших параметрів. Для цієї мети в конкретних варіантах випробувального пристрою є спеціальні пристрої, наприклад пристрої зчленування, що дозволяють використовувати різні обертові тіла, регулюючі пристрої, призначені для регулювання плеча, регульований засіб обмеження і різні вимірювальні блоки, призначені для визначення таких параметрів, як швидкості обертання і напрямку обертання різних осей обертання. На фіг. 4 схематично зображена ситуація, коли маса m тіла 2 використовується для прикладання крутного моменту відносно осі 16 нахилу. Тіло 2 обертається навколо першої осі 4, що є віссю власного обертання. Вісь 4 власного обертання розташована під кутом 9 нахилу відносно вертикальної другої осі 11, що є вихідною віссю. Вісь 4 власного обертання може обертатися навколо осі 16 нахилу, яка перпендикулярна як цій осі 4, так і вертикальній вихідній осі 11. Крім того, вісь 4 власного обертання може обертатися навколо вихідної осі 11. Таким чином, тіло 2 може обертатися навколо трьох різних осей, а саме навколо осі 4 власного обертання, навколо вертикальної вихідної осі 11 і навколо горизонтальної осі 16 нахилу. Тіло 2 встановлене на першій осі 4 на віддаленні від точки IP перетину, в якій перетинаються перша вісь 4, вихідна вісь 11 і вісь 16 нахилу. Центр маси CM тіла 2 знаходиться на відстані 1 від осі 16 нахилу, що приводить до виникнення плеча довжиною 1. На тіло 2 діє земне тяжіння, що приводить до появи сили тяжіння, яка діє в центрі маси CM тіла 2: FG=m-g (Рівняння 1) 2 де g - прискорення вільного падіння, що має середню величину 9,81 м/с . Сила FG, прикладена до тіла 2, породжує крутний момент Т, діючий відносно осі нахилу. Величина крутного моменту Τ визначається як: T=FG-/-sin9=m-g-/-sine (Рівняння 2) Крутний момент Τ прикладений в напрямку, вказаному стрілками 21. Якщо тіло 2 обертається навколо першої осі 4 з кутовою швидкістю CDspin, що перевищує критичну кутову швидкість ос, то в напрямку, вказаному стрілкою 22, виникає реактивний крутний момент. Оскільки величина реактивного крутного моменту більша величини крутного моменту Т, виникаючого за рахунок ваги тіла, реактивний крутний момент спричиняє зменшення кута нахилу. Якщо тіло 2 обертається навколо першої осі 4 з кутовою швидкістю spin, яка менша критичної кутової швидкості с, то реактивний крутний момент по величині крутного моменту менше Т, виникаючого за рахунок ваги тіла, і кут нахилу збільшується. Обертання тіла 2 навколо осі 4 власного обертання, вихідної осі 11 і осі 16 нахилу було виміряне і записане в ході експериментів, які далі будуть представлені за допомогою виміряних значень. Передбачається, що обертання осі 4 власного обертання навколо вихідної осі 11 стосується ефекту прецесії, який добре відомий в теорії твердих тіл. Випробувальний пристрій за фіг. 5 На фіг. 5 показаний один з варіантів випробувального пристрою, який працює згідно зі схемою, показаною на фіг. 4. Істотною відмінністю випробувального пристрою, показаного на фіг. 5, в порівнянні з варіантом передавального пристрою, показаного на фіг. 1, є те, що тіло 2 у випробувальному пристрої, показаному на фіг. 5, встановлене з ексцентриситетом, що створює плече довжиною 1. Термін «ексцентриситет» тут означає, що центр маси CM тіла 2 не знаходиться в точці IP перетину, як у випадку тіла, показаного на фіг. 1-3. Тому на тіло 2 впливає земне тяжіння, тобто тіло 2 з масою m прикладає крутний момент відносно осі 16 нахилу. 19 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 Випробувальний пристрій містить тіло 2, наприклад, монолітний циліндричний маховик, який встановлений на валу 3 співвісно цьому валу для спільного обертання. Подовжня вісь вала 3 обертання співпадає з віссю 4 обертання. Вал 3 обертання з можливістю обертання встановлений всередині внутрішньої рамки 5 за допомогою внутрішніх підшипників 6. Внутрішня рамка 5 за допомогою зовнішніх підшипників 8 встановлена всередині зовнішньої рамки 7 для обертання навколо осі 16 нахилу. Друга рамка 7 встановлена на вихідному валу 110, подовжня вісь якого співпадає з вертикальною вихідною віссю 11. Розташований вертикально вихідний вал 110 спирається на підшипник 40, що дозволяє цьому валу 110 обертатися навколо своєї подовжньої осі. Підшипник 40 прикріплений до опори 41, наприклад триноги, для того, щоб втримувати вихідний вал 110 в положенні, коли він проходить вздовж вертикально розташованої вихідної осі 11. Опора встановлена на землі, наприклад, за допомогою гвинтів. Вісь 4 власного обертання знаходиться під кутом нахилу відносно вихідної осі 11. Тіло 2 встановлене на першій осі 4 на віддаленні від точки IP перетину осі 4 власного обертання, вихідної осі 11 і осі 16 нахилу. Центр маси CM тіла 2 знаходиться на відстані 1 від осі 16 нахилу. На тіло 2 діє земне тяжіння, породжуючи силу тяжіння F G=mg, діючу на центр маси CM тіла 2, 2 де m маса тіла 2, a g прискорення вільного падіння, що має середню величину 9,81 м/с . Сила FG, прикладена до тіла 2, породжує крутний момент Т, діючий відносно осі 16 нахилу. Величина крутного моменту Τ є наступною: T=FG1sin=mg1sin. Вал 3 обертання містить засіб 33 зчленування, що полегшує з'єднання із зовнішнім джерелом рушійної енергії. Зовнішнє джерело рушійної енергії, наприклад коловорот або дриль, використовується для приведення тіла 2 у обертання з кутовою швидкістю spin навколо осі 4 власного обертання. Однак також можна забезпечити кутову швидкість spin тіла 2 за допомогою будь-якого іншого джерела вхідної рушійної енергії, наприклад електродвигуна, який стаціонарно встановлений на тілі 2 або на валу 3 обертання. Випробувальний пристрій додатково містить засіб 210 обмеження, призначений для обмеження кута нахилу допустимим діапазоном. Засіб 210 обмеження (на фіг. 5 детально не показаний) може бути вбудований у зовнішні підшипники 8. Засіб 210 обмеження обмежує поворот вала 3 обертання діапазоном між мінімальним кутом min нахилу і максимальним кутом mах нахилу. Тіло 2 приводиться у обертання з кутовою швидкістю spin. Кутова швидкість тіла 2 в комбінації з крутним моментом, що створюється тілом 2 відносно осі 16 нахилу, спричиняє обертання вихідного вала 110. Для тіла 2 існує критична кутова швидкість с, яка залежить від кута нахилу. Метою є визначення критичної кутової швидкості с тіла 2. При куті θ нахилу між 0° і 90° критична кутова швидкість с може бути визначена таким чином. Передбачимо, що тіло 2 обертається з кутовою швидкістю spin навколо осі 4 власного обертання. Якщо кутова швидкість spin приводить до обертання вала 3 обертання навколо осі 16 нахилу в напрямку збільшення кута θ нахилу, тобто на фіг. 5 вниз, то кутова швидкість spin тіла 2 нижче критичної кутової швидкості с. Якщо кутова швидкість spin приводить до обертання вала 3 обертання навколо осі 16 нахилу в напрямку зменшення кута θ нахилу, тобто на фіг. 5 вгору, то кутова швидкість spin тіла 2 вище критичної кутової швидкості с. Якщо кутова швидкість spin не приводить до обертання вала 3 обертання навколо осі 16 нахилу, то кутова швидкість spin тіла 2 дорівнює критичній кутовій швидкості с. Визначення критичної кутової швидкості с може бути узагальнене в наступній програмі: Етап 1: Вибирається значення spin кутової швидкості руху тіла 2 навколо осі 4 власного обертання. Етап 2: Якщо кутова швидкість spin приводить до обертання навколо осі 16 нахилу в напрямку збільшення кута θ нахилу, перейти до етапу 3; якщо кутова швидкість spin приводить до обертання навколо осі 16 нахилу в напрямку зменшення кута θ нахилу, перейти до етапу 4; якщо кутова швидкість spin не приводить до обертання навколо осі 16 нахилу, то критична кутова швидкість с тіла 2 визначається таким чином: c=spin. Етап 3: Збільшити значення spin і перейти до етапу 2. Етап 4: Зменшити значення spin і перейти до етапу 2. Критична кутова швидкість с залежить від геометрії і маси тіла 2, розподілу щільності матеріалу тіла, кута θ нахилу між віссю 4 власного обертання і вихідною віссю 11, відстані 1, 20 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 тобто величини крутного моменту, і певних умов навколишнього середовища, таких як температура навколишнього середовища і вологість. Перевагою випробувального пристрою, показаного на фіг. 5, є те, що тіло 2 легко можна розташувати з використанням будь-якого з двох методів. При першому методі тіло 2 можна встановити з ексцентриситетом на валу 3 обертання, як показано на фіг. 5, в результаті чого центр маси CM тіла 2 знаходиться на відстані 1 від точки IP перетину. У цій ситуації маса m тіла 2 створює крутний момент Τ величиною T=mg1sin відносно осі 16 нахилу. При альтернативному методі тіло 2 можна встановити на валу 3 обертання таким чином, щоб центр маси CM тіла 2 знаходився в точці IP перетину, що відповідає граничному випадку 1=0. В цій ситуації маса m тіла 2 не створює крутного моменту відносно осі 16 нахилу. У цьому альтернативному випадку, щоб створити крутний момент відносно осі 16 нахилу, необхідно забезпечити зовнішній засіб додавання крутного моменту, наприклад циліндр, який прикладає постійний крутний момент у всьому діапазоні кутів нахилу. Випробувальний пристрій за фіг. 6 На фіг. 6 показаний інший варіант випробувального пристрою, працюючого згідно зі схемою, показаною на фіг. 4. Випробувальний пристрій, показаний на фіг. 6, аналогічно випробувальному пристрою, показаному на фіг. 5, за винятком рамок 5 і 7. Замість рамок 5 і 7 випробувальний пристрій, показаний на фіг. 6, містить вихідний вал 110 і поворотну штангу 30. Поворотна штанга 30 встановлена з можливістю повороту на вихідному валу 110 за допомогою шарніра 31, в результаті чого поворотна штанга 30 може обертатися навколо осі 16 нахилу. Поворотна штанга 30 проходить вниз за шарнір 31, щоб зробити можливою спільну роботу цієї штанги 30 з засобом 210 обмеження. Що стосується маси поворотної штанги 30, то її центр маси відносно шарніра 31 розташований таким чином, щоб на цю штангу 30 окремо не діяв крутний момент. Поворотна штанга 30 містить підшипник 32, що робить можливим обертання тіла 2 навколо осі 4 власного обертання, яка являє собою подовжню вісь поворотної штанги 30. Положення підшипника 32 на поворотній штанзі можна змінювати для регулювання довжини 1 плеча. Випробувальний пристрій додатково містить засіб 210 обмеження, призначений для обмеження допустимого діапазону кутів нахилу. Засіб 210 обмеження може бути жорстко з'єднаний з вихідним валом 110 або поворотною штангою 30. Засіб 210 обмеження обмежує поворот поворотної штанги 30 діапазоном між мінімальним кутом нахилу min і максимальним кутом нахилу mах. На фіг. 7 засіб 210 обмеження показано в збільшеному масштабі. У переважному випадку елементи випробувальних пристроїв, показаних на фіг. 5 і 6, зокрема тіло 2, виготовлені з матеріалу, що має великий модуль пружності, який переважно вищий 70 ГПа, наприклад такого жорсткого матеріалу, як сталь або алюміній. Засіб обмеження На фіг. 7 показаний перший варіант засобу 210 обмеження, призначеного для обмеження діапазону кутів θ нахилу. Засіб 210 обмеження містить пару паралельних металевих пластин 221, які нерухомо закріплені на вихідному валу 110 нижче шарніра 31. Металеві пластини 221 розташовані на відстані одна від одної з утворенням вертикального коридору, в якому поворотна штанга 30 вільно може переміщуватися вгору і вниз навколо осі 16 нахилу. Кожна з металевих пластин 221 містить набір отворів 213. Набори отворів в двох металевих пластинах 221 вирівняні один відносно одного таким чином, щоб металевий болт 214, 215 можна було ввести горизонтально через два вирівняних отвори 213. Нижній металевий болт 214 вставляють в нижнє положення, таким чином, створюючи стопор для поворотної штанги 30 при мінімальному куті нахилу min. Верхній металевий болт 215 вставляють у верхнє положення, таким чином, створюючи стопор для поворотної штанги 30 при максимальному куті нахилу max. На фіг. 8 показаний альтернативний варіант засобу 210 обмеження, призначеного для обмеження діапазону кутів θ нахилу. Функціонування засобу 210 обмеження, показаного на фіг. 8, аналогічне функціонуванню засобу 210 обмеження, показаного на фіг. 7, за винятком положення цього засобу 210. На відміну від металевих пластин 221 з пари, показаної на фіг. 7, металеві пластини з пари, показаної на фіг. 8, розташовані на шарнірі 31 і вище нього. Нижній металевий болт 214 вставляють в нижнє положення, таким чином, створюючи стопор для поворотної штанги 30 при максимальному куті нахилу mах. Верхній металевий болт 215 вставляють у верхнє положення, таким чином, створюючи стопор для поворотної штанги 30 при мінімальному куті нахилу min. На фіг. 9 показаний ще один варіант засобу 210 обмеження. Засіб 210 обмеження містить круглу металеву пластину 50 з криволінійним отвором 51, розташованим поблизу від краю пластини 50, перший стопор 52 і другий стопор 53, які виступають відносно пластини 50 і виконані з можливістю переміщення вздовж отвору 51, а також болт 54, виконаний з можливістю 21 UA 97896 C2 5 10 15 20 25 30 35 40 45 50 55 60 переміщення в діапазоні між першим стопором 52 і другим стопором 53. Пластина 50 нерухомо прикріплена до зовнішнього тримача 7 передавального пристрою 1, показаного на фіг. 1, таким чином, щоб вісь 16 нахилу проходила через центр пластини 50 перпендикулярно площині цієї пластини. Шарнір 31, розташований на осі 16 нахилу, проходить через центр пластини 50 і виступає відносно цієї пластини. Один кінець болта 54 нерухомо прикріплений до виступаючого шарніра 31 таким чином, щоб цей болт 54 проходив під кутом 90 градусів відносно осі 16 нахилу. Довжину бота 54 вибирають таким чином, щоб поворот цього болта навколо осі 16 нахилу обмежувався першим стопором 52 і другим стопором 53. Положення першого стопора 52 і другого стопора 53 можна змінювати індивідуально, навіть під час роботи передавального пристрою 1. Зміну положення першого стопора 52 або другого стопора 53 можна забезпечити, наприклад, за допомогою зубчатого механізму. Відповідні положення першого стопора 52 і другого стопора 53 визначають максимальний кутовий діапазон , в межах якого болт 54 може повертатися відносно осі 16 нахилу. При цьому допустимий діапазон для кута θ нахилу між першою віссю 4 і другою віссю 11 можна задавати і змінювати навіть під час роботи передавального пристрою 1. Масив На фіг. 10 показаний переважний масив 22 з чотирьох передавальних пристроїв. Масив 22 містить чотири передавальних пристрої, аналогічних передавальному пристрою 1, показаному на фіг. 1, де рами 9 чотирьох передавальних пристроїв зібрані в єдину раму 90 масиву. Вихідні вали 110, розташовані на других осях 11 чотирьох передавальних пристроїв, виступають з переднього боку рами 90 масиву. Напрямок дії вихідної рушійної енергії кожного з вихідних валів 110 змінений за допомогою кутових зубчатих передач 29 для об'єднання відповідної вихідної рушійної енергії чотирьох передавальних пристроїв на одному загальному вихідному валу 36. Кожний з чотирьох передавальних пристроїв містить засіб зворотного зв'язку, до складу якого входить ремінь 18 і генератор 19 змінного струму, для зворотної подачі вихідної рушійної енергії в передавальні пристрої. Поле сил На фіг. 11 показане поле 201 сил, діючих на циліндричне тіло 2 товщиною dx. На фіг. 11 показано, що площина 200 тіла 2 проходить перпендикулярно осі обертання цього тіла 2. На фіг. 11 показані три вектори х, у, z, що є осями тривимірної прямокутної системи координат, щоб проілюструвати орієнтацію площини 200 і поля 201 сил. Крутний момент прикладений до тіла 2 відносно третьої осі 16. Третя вісь 16 розташована на осі x прямокутної системи координат і проходить через точки А і В площини 200 тіла. Вектор крутного моменту спрямований по осі x прямокутної системи координат. Напрямок 21 обертання, викликаного крутним моментом, визначається з використанням правила правої руки: використовуючи праву руку, укажіть великим пальцем напрямок вектора крутного моменту. Стиснуті пальці покажуть напрямок обертання. Поле 201 сил складається з векторів сили. Як приклад на фіг. 11 показані чотири вектори 100-103 поля 201 сил. Для циліндричного тіла 2 товщиною dx форма поля сил, показаного на фіг. 11, ідентична полю сил, виникаючому в круглому поперечному перерізі стрижня, який гнуть. Вектори 100 і 101 являють собою вектори поля 201 сил, що мають максимальне значення. Вони орієнтовані в позитивному і негативному напрямку осі z, відповідно. Вектори 102 і 103 являють собою вектори поля 201 сил, що мають менше значення, яке залежить від їх положення в площині 201 тіла. Вони орієнтовані в позитивному і негативному напрямку осі z, відповідно. Вектори На фіг. 12 зображена орієнтація векторів, пов'язаних з обертальними рухами, виникаючими в передавальному пристрої, відповідному одному з варіантів реалізації даного винаходу. На фіг. 12 показаний циліндричний маховик 2 передавального пристрою. Центр маси маховика 2 знаходиться в точці IP перетину, де перетинаються перша вісь 4, друга вісь 11 і третя вісь 16. Площина показана тільки для пояснення відносного розташування осей 4, 11, 16 і маховика 2. Маховик 2 обертається, при цьому вісь його обертання співпадає з першою віссю 4. Вектор кутової швидкості при кутовому русі маховика 2 навколо першої осі 4 позначений як вектор V1 власного обертання. До маховика 2 відносно третьої осі 16 (тобто осі нахилу) прикладений крутний момент в напрямку збільшення кута нахилу між першою віссю 4 і другою віссю 11. Вектор крутного моменту, прикладеного відносно третьої осі 16, позначений як вектор V3 крутного моменту, прикладеного відносно третьої осі. Крутний момент, прикладений відносно третьої осі 16, викликає прецесію першої осі 4 відносно другої осі 11. Вектор кутової швидкості при кутовому русі першої осі 4 навколо другої осі 11 позначений як вектор V2 вихідного руху. 22 UA 97896 C2 5 10 15 20 25 Довжина з'єднувальної ланки На фіг. 13 наведена схема, що ілюструє визначення довжини з'єднувальної ланки. На фіг. 13 показані перша вісь 4 і друга вісь 11 передавального пристрою, відповідного даному винаходу. Обидві осі 4, 11 на фіг. 13 лежать в площині креслення. Перша вісь 4 закріплена з можливістю повороту на другій осі 11 за допомогою шарніра, в результаті чого перша вісь 4 може обертатися на фіг. 13 в площині креслення навколо центра шарніра 34. Перша вісь 4 орієнтована відносно другої осі 11 під кутом θ нахилу. Перша вісь 4 являє собою вісь власного обертання (тобто вісь обертання) тіла 2. На фіг. 13 показаний контур тіла 2, яке встановлене в передавальному пристрої для обертання навколо осі 4 власного обертання, при цьому вісь 4 власного обертання проходить через центр маси CM тіла 2, і момент інерції цього тіла збільшений до максимального. На фіг. 13 показаний випадок, коли тіло 2 несиметричне відносно центральної площини 250 (тобто площини, яка проходить через центр маси CM тіла 2 і ортогональна першій осі 4). У цьому випадку, з двох можливих положень при встановленні, використовується положення з меншою відстанню між центром маси CM тіла 2 і третьою віссю 16, яка у переважному випадку проходить через центр шарніра 34. Існує нескінченна множина площин, що проходять через тіло 2, які ортогональні осі 4 власного обертання. З цих площин площина з мінімальною відстанню до центра шарніра 34 задана як площина Рс з'єднання. При використанні площини Рс з'єднання довжина 1с з'єднувальної ланки визначається як відстань від точки перерізу площини Рс з'єднання і осі 4 власного обертання до центра шарніра 34. Довжина 1с з'єднувальної ланки відрізняється від довжини плеча, що визначається як відстань від центра маси CM тіла 2 до третьої осі 16. Експерименти Наведені далі чотири експерименти 1-4 були виконані з використанням випробувального пристрою, показаного на фіг. 6. У цих експериментах були використані дев'ять різних тіл, які вказані в наведеній далі Таблиці 1. Таблиця 1 Параметри тіл А, В, С, D, Е, F, G, Η і J Форма Тіло А Тіло В Тіло С Тіло D Тіло Ε Тіло F Тіло G Тіло Н Тіло J Матеріал Маса, кг Кільце Циліндр Циліндр Циліндр Циліндр Циліндр Циліндр Кільце Кільце Сталь Сталь Алюміній Алюміній Сталь Сталь Сталь Сталь Сталь 11,324 9,785 3,846 9,684 0,107 0,172 0,431 0,694 0,858 3 30 35 Зовнішній діаметр, мм 520 390 390 240 60 60 60 60 60 Внутрішній діаметр, мм Висота, мм 480 30 зо 20 10 10 80 5 8 20 40 50 Використовувана сталь має густину 7850 кг/м , використовуваний алюміній має густину 2700 3 кг/м . Експеримент 1 У цьому експерименті ми випробовували чотири тіла А, В, С і D, вказані в Таблиці 1, вимірюючи критичні кутові швидкості с цих тіл для двох різних кутів нахилу. Експеримент виконувався у випробувальному пристрої, показаному на фіг. 6. Центр маси CM цих тіл знаходився на відстані 1, що становила приблизно 0,072 м від точки IP перетину. У першій серії кут θ нахилу був заданий таким, що дорівнював 45 градусам. Виміряні значення наведені в Таблиці 2а. 23 UA 97896 C2 Таблиця 2а Критичні кутові швидкості с при θ =45°, виміряні в експерименті 1 з використанням випробувального пристрою за фіг. 6 Тіло А Тіло В Тіло С Тіло D 5 Величина крутного моменту, прикладеного Критична кутова швидкість с, об/хв відносно осі нахилу, Нм 9,14 99 5,58 381 2,20 192 6,48 410 Одиниця вимірювання «об/хв» означає «оберти за хвилину», тобто 60 об/хв відповідає 1 Гц. У другій серії кут θ нахилу був заданий таким, що дорівнював 25 градусам. Виміряні значення наведені в Таблиці 2b. Таблиця 2b Критичні кутові швидкості с при θ =25°, виміряні в експерименті 1 з використанням випробувального пристрою за фіг. 6 Тіло А Тіло В Тіло С Тіло D 10 15 20 25 30 35 Величина крутного моменту, прикладеного відносно осі нахилу, Нм 5,46 3,33 1,31 3,81 Критична кутова швидкість с об/хв 85 280 160 355 Експеримент 2 Метою цього експерименту є демонстрація того, що при кутовій швидкості spin тіла менше критичної кутової швидкості с тіло 2 падає, тобто обертається відносно осі 16 нахилу в тому ж напрямку, що і напрямок прикладеного крупного моменту, створеного силою тяжіння, діючою на тіло 2 масою m. Експеримент може бути узагальнено представлений наступними етапами: 1. Тіло 2 приводиться у обертання навколо осі 4 власного обертання з використанням зовнішнього джерела рушійної енергії до досягнення первинної кутової швидкості spin, яка нижча критичної кутової швидкості с цього тіла для первинного кута min нахилу. 2. Тіло 2 розташовується під первинним кутом нахилу min. 3. Тіло 2 звільняється при первинному куті нахилу min. 4. Вимірюється тривалість обертання тіла 2 навколо осі 16 нахилу, починаючи при первинному куті нахилу min і закінчуючи при остаточному куті нахилу mах. 5. Під час цього обертання вимірюється максимальна вихідна кутова швидкість out вихідного вала 110. Ці п'ять етапів були виконані для трьох тіл А, В і С, вказаних в Таблиці 1. Експеримент з п'ятьма описаними вище етапами був проведений таким чином. Тіло 2 розташовують на поворотній штанзі 30 на відстані 1=0,072 м від осі 16 нахилу. Засоби 210 обмеження регулюють таким чином, щоб вони обмежували кут нахилу діапазоном між мінімальним кутом нахилу min=30° і максимальним кутом нахилу max=80°. Поворотну штангу 30 спочатку розташовують під кутом нахилу min=30° і потім звільняють. Якщо тіло 2 не обертається, воно падає під впливом сили тяжіння, і поворотна штанга 30 повертається навколо осі 16 нахилу із збільшенням кута нахилу. Тривалість падіння від первинного кута нахилу min=30° до остаточного кута нахилу mах=80° менше 0,5 с. Якщо тіло привели у обертання навколо власної осі до досягнення первинної кутової швидкості spin менше критичної кутової швидкості с цього тіла і звільнили при первинному куті нахилу min=30°, поворотна штанга 30 прецесує навколо вертикальної вихідної осі 11 з повільним збільшенням кута нахилу. Прецесія тіла 2 приводить до обертання вихідного вала 110 з вихідною кутовою швидкістю out. Спіральний рух поворотної штанги 30 з постійним 24 UA 97896 C2 збільшенням кута нахилу продовжується доти, поки поворотна штанга 30 не торкнеться верхнього металевого болта 215 при остаточному куті нахилу mах=80. У Таблиці 3 наведені результати цього експерименту для тіл А, В, С Таблиці 1. Таблиця 3 Падіння і прецесія поворотної штанги, відповідно Первинна Первинний кут Остаточний кут Тривалість кутова прецесії нахилу min, град. нахилу mах, (падіння), с град. швидкість spin, об/хв Тіла А, В, С 0 30 80
ДивитисяДодаткова інформація
Назва патенту англійськоюGear device for providing rotation about at least one output axis and a method for providing rotation
Автори англійськоюOzturk, Mustafa, Naci
Назва патенту російськоюПередающее устройство, которое обеспечивает вращение вокруг по меньшей мере одной выходной оси и способ обеспечения вращения вокруг нее
Автори російськоюОзтурк Мустафа Наджи
МПК / Мітки
МПК: F16H 33/00
Мітки: спосіб, щонайменше, однієї, обертання, неї, забезпечує, пристрій, передавальний, вихідної, осі, забезпечення
Код посилання
<a href="https://ua.patents.su/41-97896-peredavalnijj-pristrijj-yakijj-zabezpechueh-obertannya-navkolo-shhonajjmenshe-odnieh-vikhidno-osi-i-sposib-zabezpechennya-obertannya-navkolo-ne.html" target="_blank" rel="follow" title="База патентів України">Передавальний пристрій, який забезпечує обертання навколо щонайменше однієї вихідної осі і спосіб забезпечення обертання навколо неї</a>
Пристрій та спосіб забезпечення обертання контейнера під час перевірки
Номер патенту: 92926
Опубліковано: 27.12.2010
Автори: Лангендерфер Брайан А., Джувінолл Джон У.
МПК: B07C 5/34, G01N 21/90
Мітки: спосіб, пристрій, обертання, перевірки, забезпечення, контейнера
Формула / Реферат:
1. Пристрій для перевірки контейнера на наявність промислових відхилень, який включає: засоби обертання (30) контейнера (12), що перевіряється; щонайменше одне джерело світла (14; 52) для спрямовування світла на контейнер (12); щонайменше один датчик світла (24; 58) для прийому світла від зазначеного джерела після взаємодії з контейнером (12) та для одержання даних зображення (18а; 20а; 34); і процесор інформації (26; 48; 60), спряжений з...
Спосіб перетворення енергії обертання планети навколо своєї осі (варіанти) та енергетична станція, що реалізує спосіб
Номер патенту: 94996
Опубліковано: 25.06.2011
Автори: Процан Юліан Володимирович, Боровик Валерій Анатолійович, Толмачов Володимир Васильович
МПК: G01C 19/00, F16H 33/00
Мітки: енергетична, осі, варіанти, реалізує, енергії, перетворення, спосіб, обертання, своєї, станція, планети
Формула / Реферат:
1. Спосіб перетворення енергії обертання планети навколо своєї осі, що включає приймання частини енергії у вигляді активної сили жорстко закріпленою на планеті основою, виконання цією силою механічної роботи за допомогою кінематичного ланцюга над генератором енергії, взаємним переміщенням його вхідного й вихідного елементів при рівній і протилежно спрямованій протидії реакцією астатичного гіроскопа із трьома степенями свободи, викликаною...
Місткість із засобом, що забезпечує звукове закривання (варіанти), та спосіб забезпечення звукової індикації
Номер патенту: 97626
Опубліковано: 12.03.2012
Автор: Тілтон Ендрю Томас
МПК: B65D 50/00, B65D 41/04
Мітки: забезпечує, забезпечення, засобом, спосіб, місткість, закривання, звукове, індикації, варіанти, звукової
Формула / Реферат:
1. Місткість із засобом, що забезпечує звукове закривання, яка містить: корпус з горловиною, що оточує отвір;зовнішню різь на горловині, яка має щонайменше одну виїмку, причому вказані одна або більше виїмок проходять повністю через різь, розділяючи її на множину сегментів;кришку, яка має верхню стінку та юбку, що відходить від неї; і внутрішню різь на юбці для входження в зачеплення із зовнішньою різзю на...
Фрикційний ниткоподавач для подавання щонайменше однієї нитки
Номер патенту: 54609
Опубліковано: 17.03.2003
Автори: Вьорнер Хрістоф, Шмодде Герман
МПК: B65H 51/00, D04B 15/38, B65H 23/04
Мітки: щонайменше, подавання, однієї, ниткоподавач, нитки, фрикційний
Формула / Реферат:
1. Фрикційний ниткоподавач для подавання щонайменше однієї нитки, що містить щонайменше один нитконапрямний елемент, через який або уздовж якого під час функціонування проходить нитка, щонайменше один ниткоподавальний барабанчик, який змонтований за допомогою несучого пристрою з можливістю обертання навколо заданої осі на опорі, яка з’єднується з ниткообробною машиною, причому ниткоподавальний барабанчик оснащений опорною поверхнею для...
Спосіб забезпечення прямолінійності осі обертання багатоопорного обертового агрегату
Номер патенту: 62253
Опубліковано: 25.08.2011
Автори: Кузьо Ігор Володимирович, Дзюбик Людмила Володимирівна
МПК: F27B 7/22
Мітки: забезпечення, багатоопорного, агрегату, спосіб, прямолінійності, осі, обертового, обертання
Формула / Реферат:
Спосіб забезпечення прямолінійності осі обертання багатоопорного обертового агрегату, що передбачає регулювальні переміщення опор у вертикальній площині, який відрізняється тим, що опори обертового агрегату вибирають як пружні елементи, визначають навантаження, яке діє на них, визначають пружні деформації опор, а регулювальні переміщення у вертикальній площині здійснюють із врахуванням визначених пружних деформацій опор до забезпечення...
Попередній патент: Варильний агрегат для пива
Наступний патент: Спосіб вирощування квіткової культури рослин
Випадковий патент: Інгаляторний пристрій для вдихання активної порошкоподібної або рідкої речовини