Спосіб розпізнавання образів
Номер патенту: 100283
Опубліковано: 27.07.2015
Автори: Меняйленко Олександр Сергійович, Захожай Олег Ігорович, Бідюк Петро Іванович
Формула / Реферат
Спосіб розпізнавання образів, що передбачає визначення сукупності еталонних образів, які характеризують m класів розпізнавання, сприйняття характеристик об'єкта розпізнавання за допомогою технічних засобів реєстрації та датчиків, перетворення їх у послідовність елементів та формування сукупності k образів об'єкту розпізнавання на основі інформації різної природи виникнення, який відрізняється тим, що після формування сукупності k образів зменшують кількість образів, що підлягають обробці, здійснюючи роздільний аналіз цих образів шляхом порівняння їхніх ознак з ознаками еталонних образів, потім визначають відстані цих образів від еталонних та повторюють процеси порівняння ознак і визначення відстані до тих пір, поки за одним або декількома образами з сукупності k не буде досягнуте значення відстані, яке не перевищуватиме наперед заданого значення, що дозволить віднести об'єкт розпізнавання до того класу, до якого досягнута мінімальна відстань, при цьому не проводячи повного аналізу усіх ознак, що зменшує часову складність та, як наслідок, спрощує апаратну реалізацію системи розпізнавання та її вартість.
Текст
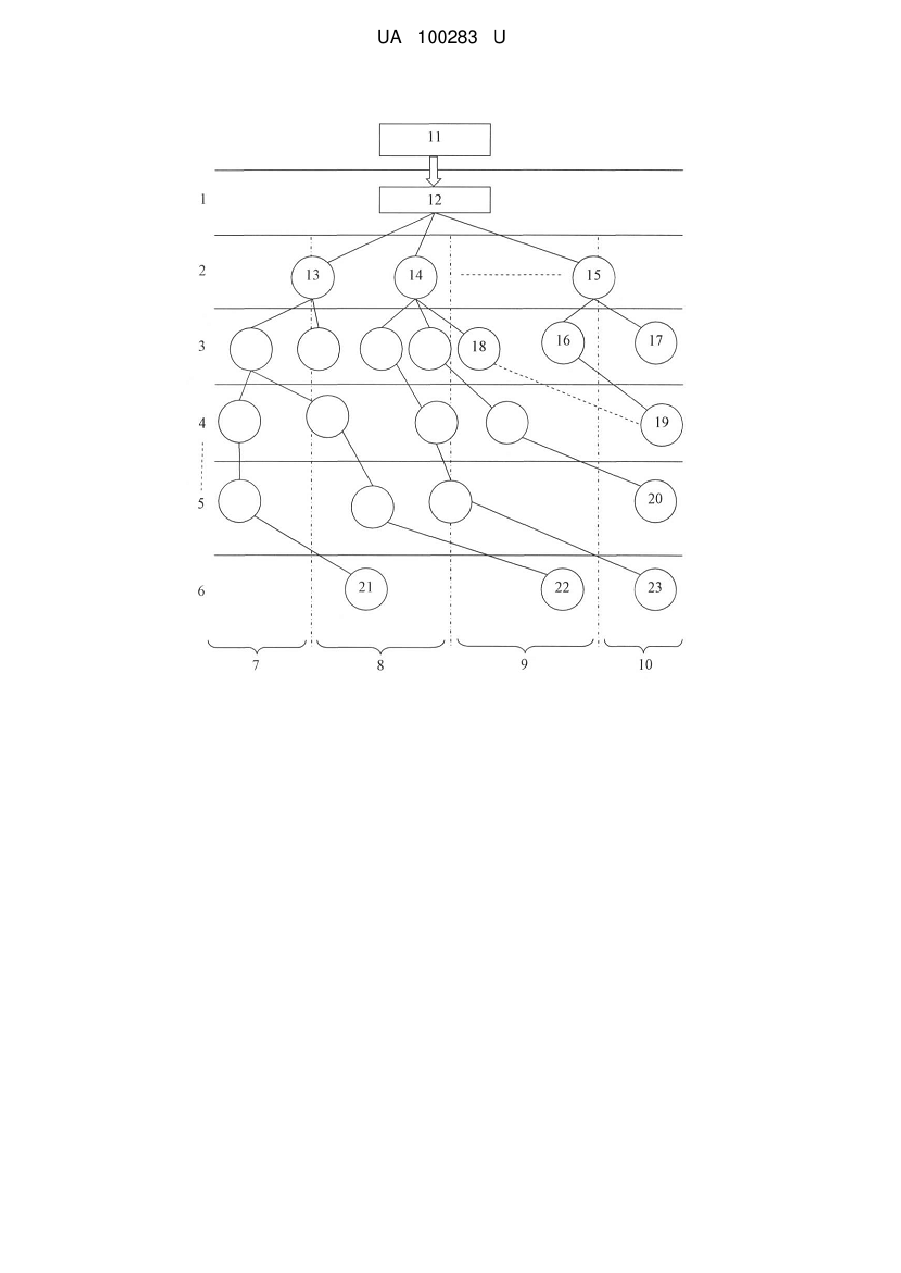
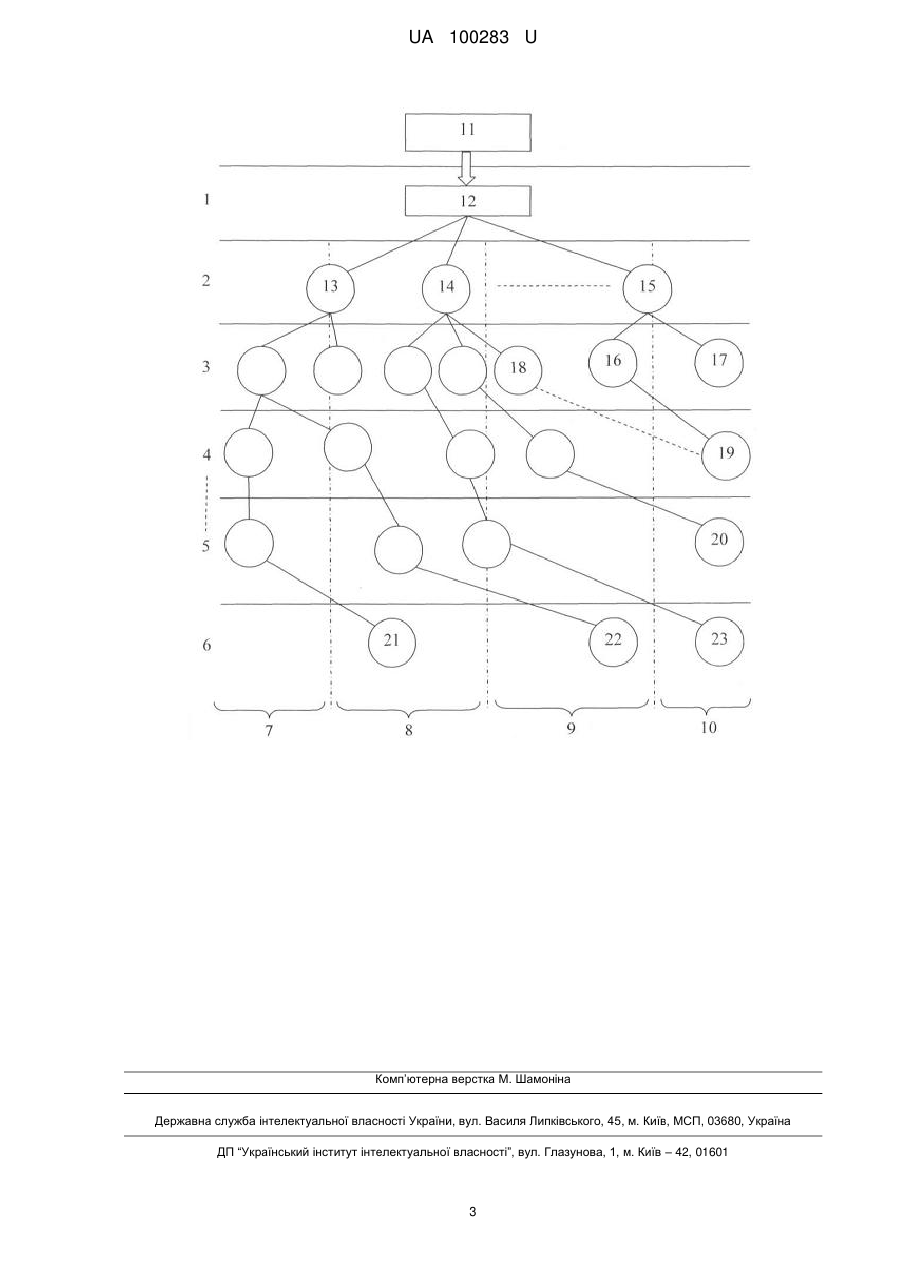
Реферат: Спосіб розпізнавання образів, що передбачає визначення сукупності еталонних образів, які характеризують m класів розпізнавання, сприйняття характеристик об'єкта розпізнавання за допомогою технічних засобів реєстрації та датчиків, перетворення їх у послідовність елементів та формування сукупності k образів об'єкту розпізнавання на основі інформації різної природи виникнення, причому після формування сукупності k образів зменшують кількість образів, що підлягають обробці, здійснюючи роздільний аналіз цих образів шляхом порівняння їхніх ознак з ознаками еталонних образів, потім визначають відстані цих образів від еталонних та повторюють процеси порівняння ознак і визначення відстані до тих пір, поки за одним або декількома образами з сукупності k не буде досягнуте значення відстані, яке не перевищуватиме наперед заданого значення, що дозволить віднести об'єкт розпізнавання до того класу, до якого досягнута мінімальна відстань, при цьому не проводячи повного аналізу усіх ознак, що зменшує часову складність та, як наслідок, спрощує апаратну реалізацію системи розпізнавання та її вартість. UA 100283 U (54) СПОСІБ РОЗПІЗНАВАННЯ ОБРАЗІВ UA 100283 U UA 100283 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі інформаційних технологій, штучного інтелекту і може використовуватися для побудови апарату прийняття рішень у інформаційних системах автоматизованої обробки інформації і управління. Відомий спосіб розпізнавання образів [Патент України № 66184А, кл. G10L 15/00, 2004 р., Бюл. № 4], в якому неперервний образ об'єкта сприймається, перетворюється у послідовність елементів, формується двійковий опис елементів послідовності, що розпізнається, у вигляді двійкових кодів, що зберігають ранги відстаней між елементами, виконується класифікація за мінімумом відстані до однієї з еталонних послідовностей елементів і на основі отриманих результатів приймається рішення про розпізнавання образу. Представлення об'єктів розпізнавання у вигляді послідовності елементів фактично обумовлює визначення деякого вектору ознак образу. Найбільш близьким за технічною суттю є спосіб розпізнавання образів [Рябенький В.М., Захожай О.І. Комбіновані системи розпізнавання образів. Журнал "Проблеми інформаційних технологій", № 01 (009). - Херсон: ХНТУ - 2011. - С. 156-160], згідно якого неперервний образ об'єкта сприймається, перетворюється у послідовність елементів, надалі, на основі інформації різної природи виникнення, формують сукупність k образів, що характеризують об'єкт розпізнавання, об'єднують ознаки цих образів у загальну сукупність та здійснюють класифікацію на основі мінімальної відстані образу до одного з попередньо визначених класів. Перевагою такого способу, стосовно попереднього, є те, що отримання сукупності образів збільшує кількість інформаційних ознак, за якими здійснюється класифікація та, відповідно, забезпечується підвищення достовірності розпізнавання. Крім цього, використання інформації різної природи виникнення збільшує кількість незалежних ознак, що сприяє отриманню достовірного результату класифікації, особливо за умови наявності викривлень у характеристиках опису об'єкту розпізнавання. Недоліком розглянутих способів є те, що розширення простору інформаційних ознак об'єкту розпізнавання призводить до збільшення часової складності процесу класифікації, підвищенню кількості операцій і, як наслідок, ускладненню технічної реалізації систем розпізнавання та збільшенню капітальних витрат. Крім цього, обмежується технічна реалізація систем розпізнавання реального часу. Технічною задачею корисної моделі є створення способу розпізнавання образів, що дає можливість знизити часову складність обробки даних та спростити апаратну реалізацію та знизити капітальні витрати на впровадження таких систем. Поставлена задача вирішується тим, що у відомому способі, який передбачає визначення сукупності еталонних образів, які характеризують m класів розпізнавання, сприйняття характеристик об'єкта розпізнавання за допомогою технічних засобів реєстрації та датчиків, перетворення їх за допомогою нормувальних перетворювачів у послідовність елементів та формування сукупності k образів об'єкту розпізнавання на основі інформації різної природи виникнення, згідно корисної моделі, після формування сукупності k образів, зменшують кількість образів що підлягають обробці, здійснюючи роздільний аналіз цих образів шляхом порівняння їхніх ознак з ознаками еталонних образів, потім визначають відстані цих образів від еталонних, та повторюють процеси порівняння ознак і визначення відстані до тих пір, доки за одним або декількома образами з сукупності k не буде досягнуте значення відстані, яке не перевищуватиме наперед заданого значення, що дозволить віднести об'єкт розпізнавання до того класу, до якого досягнута мінімальна відстань при цьому не проводячи повного аналізу усіх ознак, що знижує часову складність та, як наслідок, спрощує апаратну реалізацію системи розпізнавання та її вартість. Таке судження є коректним, оскільки апріорно відомо, що кожен з k образів характеризує один і той самий об'єкт розпізнавання. При цьому рівень достовірності задається максимально припустимим значенням відстані образів об'єкта розпізнавання від еталонних образів. Спосіб реалізується таким чином. На Фіг. 1 наведено приклад логічної послідовності дій, який пояснює сутність запропонованого способу. Цифрою 1 позначено наявний об'єкт, що надається для розпізнавання. Елемент 2 ілюструє процес сприйняття характеристик об'єкту розпізнавання в результаті чого отримують сукупність k образів об'єкту розпізнавання (елементи 13-15), які формуються на основі інформації різної природи виникнення. Горизонтальними лініями, а також цифрами 1-6 проілюстровані етапи порівняння інформативних ознак цих образів з ознаками еталонних образів та визначення характеристик відстані. Цифрами 7-10 позначені області розподілу ознак еталонних образів попередньо визначених m класів, до яких може бути віднесений об'єкт розпізнавання. Згідно запропонованого способу, спочатку визначають сукупність еталонних образів, які характеризують m класів розпізнавання 7-10 та максимально припустиме значення відстані, за 1 UA 100283 U 5 10 15 20 25 30 яким об'єкт розпізнавання може бути віднесений до одного з m класів. Надалі, на етапі 1 об'єкт надають для розпізнавання і здійснюють сприйняття його характеристик. Надалі, на етапі 2 здійснюють перетворення отриманих характеристик у послідовність елементів, в результаті чого формують сукупність k образів об'єкту розпізнавання (елементи 13-15) на основі інформації різної природи виникнення. На наступних етапах (на Фіг. 1 позначені цифрами 3-6) циклічно проводять роздільний аналіз цих образів шляхом порівняння їхніх ознак з ознаками еталонних образів та визначають відстані цих образів від еталонних. Якщо визначені відстані перевищуватимуть наперед задане максимально припустиме значення, то здійснюється наступний етап аналізу з іншими ознаками наявної сукупності образів об'єкту розпізнавання. Циклічне повторення цих етапів здійснюють до тих пір, доки за одним або декількома образами з сукупності k не буде досягнуте значення відстані, яке не перевищує наперед заданого значення, що дозволить віднести об'єкт розпізнавання до того класу, до якого досягнута мінімальна відстань. Так, згідно прикладу, проілюстрованому на Фіг. 1, на етапі 3 аналіз ознак за всіма k образами не дає необхідного збігу класифікації, оскільки отримані відстані, включаючи відмічені цифрами 16-18, не дають однозначного збігу класифікації. Тому надалі здійснюють етап 4, на якому подальша обробка ознак образу 15 приводить до визначення відстані 19, яка однозначно відповідає класу 10. Крім цього, результат порівняння ознак образу 14 дозволяє визначити відстань 19, яка також вказує на віднесення об'єкту розпізнавання до класу 10. Таким чином, на етапі 4 подальшу обробку інформативних ознак припиняють і достовірним результатом буде вважатися віднесення об'єкту розпізнавання до класу 10. Подальший аналіз ознак (на Фіг. 1 етапи 5-6) та отримання відстаней, таких як 20, 21, 22 або 23, не є раціональним і пов'язаний тільки з додатковими витратами машинного часу і збільшенням часової складності аналізу ознак об'єкту розпізнавання. В подальшому аналіз інформативних ознак може тільки підтвердити зроблену класифікацію (наприклад визначення відстані 20, що також вказує на клас 10), або вказати на наявність викривлень інформаційного простору ознак та здійснення помилкового віднесення об'єкту розпізнавання до класів 8 і 9 за визначеними відстанями 21 і 22. Запропонований спосіб використано для побудови інформаційної системи моніторингу просторового розподілу температури коксового пирога і при заданому апріорному рівні статистичної достовірності розпізнавання 0,96 зниження часової складності склало 12 % порівняно з базовим способом. Такий ефект дав можливість знизити витрати на використання апаратного забезпечення комп'ютерної системи на 7 % порівняно з базовим. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 Спосіб розпізнавання образів, що передбачає визначення сукупності еталонних образів, які характеризують m класів розпізнавання, сприйняття характеристик об'єкта розпізнавання за допомогою технічних засобів реєстрації та датчиків, перетворення їх у послідовність елементів та формування сукупності k образів об'єкту розпізнавання на основі інформації різної природи виникнення, який відрізняється тим, що після формування сукупності k образів зменшують кількість образів, що підлягають обробці, здійснюючи роздільний аналіз цих образів шляхом порівняння їхніх ознак з ознаками еталонних образів, потім визначають відстані цих образів від еталонних та повторюють процеси порівняння ознак і визначення відстані до тих пір, поки за одним або декількома образами з сукупності k не буде досягнуте значення відстані, яке не перевищуватиме наперед заданого значення, що дозволить віднести об'єкт розпізнавання до того класу, до якого досягнута мінімальна відстань, при цьому не проводячи повного аналізу усіх ознак, що зменшує часову складність та, як наслідок, спрощує апаратну реалізацію системи розпізнавання та її вартість. 2 UA 100283 U Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюMeniailenko Oleksandr Serhiovych, Bidiuk Petro Ivanovych
Автори російськоюМеняйленко Александр Сергеевич, Бидюк Петр Иванович
МПК / Мітки
МПК: G06K 9/00
Мітки: розпізнавання, спосіб, образів
Код посилання
<a href="https://ua.patents.su/5-100283-sposib-rozpiznavannya-obraziv.html" target="_blank" rel="follow" title="База патентів України">Спосіб розпізнавання образів</a>
Спосіб розпізнавання образів
Номер патенту: 100078
Опубліковано: 10.07.2015
Автори: Бідюк Петро Іванович, Меняйленко Олександр Сергійович, Захожай Олег Ігорович
МПК: G06K 9/00
Мітки: спосіб, образів, розпізнавання
Формула / Реферат:
Спосіб розпізнавання образів, що передбачає визначення сукупності m еталонних класів розпізнавання, сприйняття об'єкта розпізнавання за допомогою пристроїв реєстрації його характеристик, формування сукупності n образів об'єкта розпізнавання на основі інформації різної природи виникнення, подальшу селекцію n образів та визначення з цієї сукупності k найбільш інформативних образів, який відрізняється тим, після селекції здійснюють розподіл...
Спосіб розпізнавання образів
Номер патенту: 92493
Опубліковано: 26.08.2014
Автори: Захожай Олег Ігорович, Меняйленко Олександр Сергійович
МПК: G06K 9/00
Мітки: спосіб, образів, розпізнавання
Формула / Реферат:
Спосіб розпізнавання образів, що передбачає сприйняття образу об'єкта розпізнавання за допомогою пристроїв реєстрації його характеристик, попередню обробку і нормалізацію отриманих характеристик, формування сукупності інформаційних ознак образу та подальше проведення аналізу цих ознак для відношення образу до одного з передвизначених класів на основі подібності інформаційних ознак, який відрізняється тим, що на основі отриманої сукупності...
Спосіб розпізнавання мовних образів

Номер патенту: 66184
Опубліковано: 15.04.2004
Автори: Биков Микола Максимович, Грищук Тетяна Вікторівна
МПК: G10L 15/00
Мітки: спосіб, розпізнавання, мовних, образів
Формула / Реферат:
Спосіб розпізнавання мовних образів, що включає сприйняття неперервного образу, перетворення його в послідовність елементів, формування двійкового опису елементів послідовності, що розпізнається, у вигляді двійкових кодів, виконання класифікації за мінімумом відстані до однієї з еталонних послідовностей, для чого проводиться логічне порівняння послідовності, що розпізнається, та еталонної послідовності елементів, і на основі отриманих...
Спосіб розпізнавання мовних образів

Номер патенту: 93719
Опубліковано: 10.10.2014
Автори: Грищук Тетяна Вікторівна, Філатова Мар'яна Михайлівна, Биков Микола Максимович
МПК: G10L 15/00
Мітки: спосіб, мовних, образів, розпізнавання
Формула / Реферат:
Спосіб розпізнавання мовних образів, що передбачає сприйняття неперервного образу, перетворення його в послідовність елементів, формування двійкового опису елементів послідовності, що розпізнається, у вигляді двійкових кодів, виконання класифікації за мінімумом відстані до однієї з еталонних послідовностей, для чого проводиться логічне порівняння послідовності, що розпізнається, та еталонної послідовності елементів, і на основі отриманих...
Спосіб розпізнавання мовних образів

Номер патенту: 43743
Опубліковано: 25.08.2009
Автори: Балховський Дмитро Євгенійович, Биков Микола Максимович, Кучерук Наталя Олександрівна
МПК: G06E 1/00
Мітки: мовних, спосіб, образів, розпізнавання
Формула / Реферат:
Спосіб для розпізнавання мовних образів, що передбачає сприйняття неперервного образу, перетворення його в послідовність елементів, формування двійкового опису елементів послідовності, що розпізнається, у вигляді двійкових кодів, виконання класифікації за мінімумом відстані до однієї з еталонних послідовностей, для чого проводиться логічне порівняння послідовності, що розпізнається, та еталонної послідовності елементів, і на основі отриманих...
Попередній патент: Спосіб ліквідації післяопераційних внутрішньоторакальних залишкових порожнинних утворень та профілактики емпієми плеври
Наступний патент: Пристрій евакуаційний для транспортування поранених “укроспас”
Випадковий патент: Пристрій і спосіб для з'єднання штаб