Спосіб визначення напрямку меридіана маятниковим гірокомпасом

Формула / Реферат
Спосіб визначення напрямку меридіана маятниковим гірокомпасом, що включає попереднє визначення напрямку меридіана за допомогою негіроскопічного вимірювача, розгін ротора гірокомпаса до номінальної кутової швидкості, розаретування чутливого елемента гірокомпаса, вимір кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу, який відрізняється тим, що після попереднього визначення напрямку меридіана головну вісь чутливого елемента гірокомпаса орієнтують в південному напрямку, а точний напрямок меридіана знаходять, мінімізуючи неспівпадання виміряних кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу та обрахованих відповідних кутів повороту його математичної моделі, заданої рівнянням
![]() ,
,
де ![]() ;
; ![]() ;
; ![]() - неконтрольований зовнішній момент навколо вертикальної осі чутливого елемента гірокомпаса;
- неконтрольований зовнішній момент навколо вертикальної осі чутливого елемента гірокомпаса; ![]() - маятниковість гірокомпаса;
- маятниковість гірокомпаса; ![]() - горизонтальна складова швидкості обертання Землі;
- горизонтальна складова швидкості обертання Землі; ![]() - кінетичний момент гірокомпаса;
- кінетичний момент гірокомпаса; ![]() - кут відхилення головної осі гірокомпаса від напрямку меридіана.
- кут відхилення головної осі гірокомпаса від напрямку меридіана.
Текст
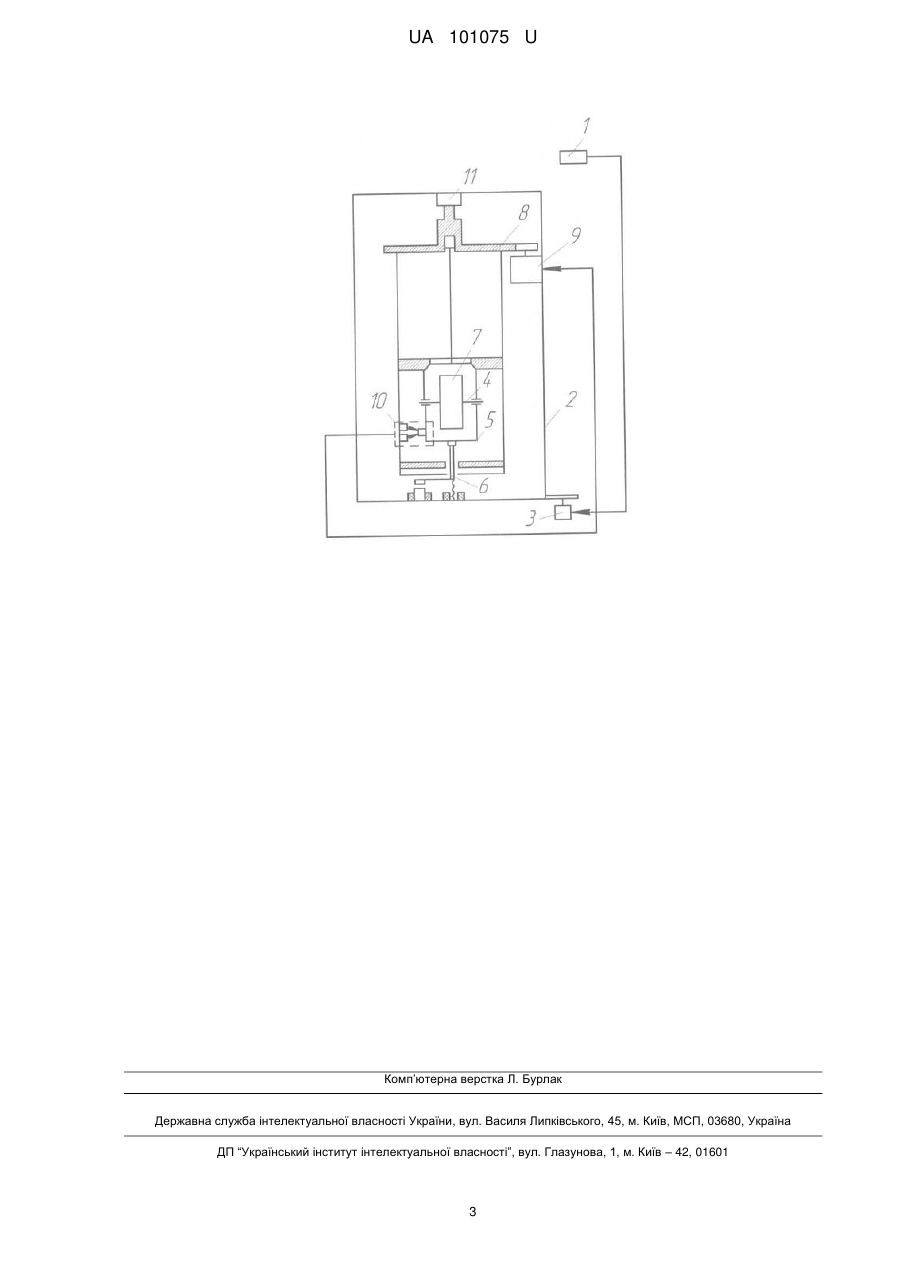
УКРАЇНА (19) UA (11) 101075 (13) U (51) МПК G01C 19/38 (2006.01) ДЕРЖАВНА СЛУЖБА ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ УКРАЇНИ (12) ОПИС ДО ПАТЕНТУ НА КОРИСНУ МОДЕЛЬ (21) Номер заявки: u 2015 01982 Дата подання заявки: 05.03.2015 (22) (24) Дата, з якої є чинними 25.08.2015 права на корисну модель: (46) Публікація відомостей 25.08.2015, Бюл.№ 16 про видачу патенту: (72) Винахідник(и): Федоров Володимир Миколайович (UA) (73) Власник(и): НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ "КИЇВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ", просп. Перемоги, 37, м. Київ-56, 03056 (UA) (54) СПОСІБ ВИЗНАЧЕННЯ НАПРЯМКУ МЕРИДІАНА МАЯТНИКОВИМ ГІРОКОМПАСОМ Спосіб визначення напрямку меридіана маятниковим гірокомпасом, що включає попереднє визначення напрямку меридіана за допомогою негіроскопічного вимірювача, розгін ротора гірокомпаса до номінальної кутової швидкості, розаретування чутливого елемента гірокомпаса, вимір кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу, причому після попереднього визначення напрямку меридіана головну вісь чутливого елемента гірокомпаса орієнтують в південному напрямку, а точний напрямок меридіана знаходять, мінімізуючи неспівпадання виміряних кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу та обрахованих відповідних кутів повороту його математичної моделі, заданої рівнянням a 2 sin m , де 2 mgl * H1 * Uг ; m M * mgl * H2 ; M - неконтрольований зовнішній момент навколо вертикальної осі чутливого елемента гірокомпаса; mgl - маятниковість гірокомпаса; Uг горизонтальна складова швидкості обертання Землі; H - кінетичний момент гірокомпаса; кут відхилення головної осі гірокомпаса від напрямку меридіана. UA 101075 U (57) Реферат: UA 101075 U UA 101075 U 5 10 15 20 25 30 35 Корисна модель належить до галузі приладобудування та може бути використана при визначенні напрямку географічного меридіана наземними маятниковими гірокомпасами. Відоме авторське свідоцтво СРСР № 347573, ("Способ определения плоскости меридиана", кл. G01C 19/38, опубл. 02.10.1972 г.), згідно з яким для скорочення часу вимірювань підтримують стале значення швидкості азимутального руху чутливого елемента гірокомпаса шляхом зміни величини кутової швидкості обертання ротора гірокомпаса, а шуканий напрямок меридіана знаходять по положенню головної осі чутливого елемента в момент досягнення кутовою швидкістю обертання ротора гірокомпаса екстремуму. Недолік відомого способу - істотний термін процесу визначення напрямку меридіана, що пов'язано з принциповою необхідністю проходження віссю ротора гірокомпаса площини меридіана в процесі вимірювань. Крім того, при наявності неконтрольованого вертикального зовнішнього моменту положення головної осі чутливого елемента при екстремумі кутової швидкості обертання ротора зміщується від меридіана. Це зміщення і обумовлює помилку в знаходженні напрямку меридіана. Найбільш близьким за технічною суттю є "Спосіб визначення напрямку меридіана маятниковим гірокомпасом" (Воронков Н.Н., Кутырев В.В., Ашимов Н.М., Гироскопическое ориентирование. М., "Недра", 1980, с. 284-293), який включає попереднє визначення напрямку меридіана будь-яким з негіроскопічних вимірювачів, наприклад - за допомогою магнітного компаса, орієнтування головної осі чутливого елемента гірокомпаса в північному напрямку, розгін ротора гірокомпаса до номінальної кутової швидкості, розаретування чутливого елемента гірокомпаса, вимір кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу, обрахування точного напрямку меридіана за наведеною формулою. Недоліком цього способу є те, що напрямок меридіана ототожнюється з положенням рівноваги коливань чутливого елемента. Наявність неконтрольованого зовнішнього моменту навколо вертикальної осі чутливого елемента призводить до зміщення положення рівноваги коливань, яке і є похибкою знаходження напрямку меридіана. В основу корисної моделі поставлено задачу підвищення точності визначення напрямку меридіана. Поставлена задача вирішується тим, що згідно зі способом визначення напрямку меридіана маятниковим гірокомпасом, після попереднього визначення напрямку меридіана головну вісь чутливого елемента гірокомпаса орієнтують в південному напрямку, а точний напрямок меридіана знаходять, мінімізуючи неспівпадання виміряних кутів повороту чутливого елемента відносно корпуса гірокомпаса та обрахованих відповідних кутів повороту його математичної моделі, заданої рівнянням a 2 sin m , 2 1 2 де mgl * H * Uг ; m M * mgl * H ; M - неконтрольований зовнішній момент навколо вертикальної осі чутливого елемента гірокомпаса; mgl - маятниковість гірокомпаса; Uг 40 45 50 55 горизонтальна складова швидкості обертання Землі; H - кінетичний момент гірокомпаса; кут відхилення головної осі гірокомпаса від напрямку меридіана. Спосіб визначення напрямку меридіана маятниковим гірокомпасом полягає в наступному. За допомогою будь-якого негіроскопічного вимірювача, наприклад-магнітного компаса, попередньо визначають напрямок меридіана, встановлюють головну вісь гірокомпаса в південному напрямку, розганяють ротор гірокомпаса до номінальної кутової швидкості і розаретують чутливий елемент, який починає рухатись в горизонтальній площині. Цей азимутальний рух є суттєво нелінійним. "Нелінійність" закона руху тим більша, чим більші величина неконтрольованого зовнішнього моменту і кут між головною віссю чутливого елемента гірокомпаса та напрямком на північ. Орієнтування головної осі чутливого елемента гірокомпаса в напрямку на південь максимально підкреслює "нелінійність" його подальшого руху, тобто відмінність від гармонійного руху на частоті вільних коливань. Порівнюючи кути повороту чутливого елемента відносно корпуса гірокомпаса, виміряні в фіксовані моменти часу, з обрахованими в ті ж моменти часу кутами повороту його математичної моделі, яка враховує вищезгадану нелінійність, мінімізують функцію, що характеризує їх неспівпадання. Параметри руху математичної моделі - початкові умови та величина неконтрольованого зовнішнього моменту навколо вертикальної осі чутливого елемента, - що відповідають мінімуму неспівпадання реального руху гірокомпаса та руху його математичної моделі, ідентифікуються окремо, отже точний напрямок меридіана в цьому випадку не містить помилки, зумовленої наявністю неконтрольованого зовнішнього моменту навколо вертикальної осі чутливого елемента гірокомпаса. 1 UA 101075 U 5 10 15 20 25 Суть корисної моделі пояснюється кресленням. На кресленні зображений гірокомпас, де: 1 - негіроскопічний вимірювач попереднього напрямку меридіана, наприклад - магнітний компас, 2 - корпус гірокомпаса, 3 - двигун повороту корпуса гірокомпаса в азимуті, 4 - головна вісь гірокомпаса, 5 - чутливий елемент гірокомпаса, 6 - аретир, 7 - ротор, 8 - слідкуючий корпус, 9 - двигун повороту слідкуючого корпуса відносно корпуса гірокомпаса, 10 - датчик кута відносного положення чутливого елемента та слідкуючого корпуса, 11 - датчик кута повороту чутливого елемента (слідкуючого корпуса) відносно корпуса гірокомпаса. За сигналом негіроскопічного вимірювача напрямку меридіана, наприклад - магнітного компаса 1, який є попереднім вимірювачем напрямку меридіана, корпус 2 гірокомпаса розвертають за допомогою двигуна 3 в азимуті таким чином, щоб головна вісь 4 гірокомпаса була спрямована на південь. В цей час чутливий елемент 5 гірокомпаса зафіксовано аретиром 6 відносно корпуса гірокомпаса. В цьому зааретованому положенні ротор 7 розганяють до номінальної кутової швидкості. Після цього виконують розаретування чутливого елемента і він починає повертатися в горизонтальній площині. Разом з чутливим елементом відносно корпуса гірокомпаса повертається і слідкуючий корпус 8. Цей поворот здійснюється двигуном 9 за допомогою сигналу з датчика 10 кута відносного положення чутливого елемента та слідкуючого корпуса. Кути повороту чутливого елемента (слідкуючого корпуса) відносно корпуса гірокомпаса вимірюють датчиком 11 в фіксовані моменти часу. Після закінчення процесу отримання інформації з гірокомпаса виконується аретування чутливого елемента. Далі здійснюється процедура мінімізації неспівпадання виміряних кутів повороту чутливого елемента відносно корпуса гірокомпаса та обрахованих відповідних кутів повороту його математичної моделі, в результаті якої отримують точний напрямок меридіана. Використання способу, який пропонується, дозволяє підвищити точність визначення напрямку географічного меридіану маятниковим гірокомпасом на нерухомій відносно Землі основі, оскільки реальний рух гірокомпаса порівнюється з рухом його математичної моделі, яка враховує особливості, зумовлені наявністю неконтрольованого зовнішнього моменту навколо вертикальної осі чутливого елемента. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 Спосіб визначення напрямку меридіана маятниковим гірокомпасом, що включає попереднє визначення напрямку меридіана за допомогою негіроскопічного вимірювача, розгін ротора гірокомпаса до номінальної кутової швидкості, розаретування чутливого елемента гірокомпаса, вимір кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу, який відрізняється тим, що після попереднього визначення напрямку меридіана головну вісь чутливого елемента гірокомпаса орієнтують в південному напрямку, а точний напрямок меридіана знаходять, мінімізуючи неспівпадання виміряних кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу та обрахованих відповідних кутів повороту його математичної моделі, заданої рівнянням a 2 sin m , де 45 2 mgl * H1 * Uг ; m M * mgl * H2 ; M - неконтрольований зовнішній момент навколо вертикальної осі чутливого елемента гірокомпаса; mgl - маятниковість гірокомпаса; Uг горизонтальна складова швидкості обертання Землі; H - кінетичний момент гірокомпаса; кут відхилення головної осі гірокомпаса від напрямку меридіана. 2 UA 101075 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 19/38
Мітки: спосіб, гірокомпасом, маятниковим, меридіана, визначення, напрямку
Код посилання
<a href="https://ua.patents.su/5-101075-sposib-viznachennya-napryamku-meridiana-mayatnikovim-girokompasom.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення напрямку меридіана маятниковим гірокомпасом</a>
Спосіб визначення швидкості і напрямку переміщення гостряка стрілкового переводу
Номер патенту: 70560
Опубліковано: 15.10.2004
Автор: Парфьонов Володимир Іванович
МПК: B61L 7/00
Мітки: визначення, швидкості, спосіб, напрямку, гостряка, переводу, стрілкового, переміщення
Формула / Реферат:
Спосіб визначення швидкості і напрямку переміщення гостряка стрілкового переводу, при якому лінійне переміщення гостряка перетворюють в обертове барабана з віссю, на якій закріплений генератор постійного струму, який відрізняється тим, що швидкість переміщення гостряка визначають по амплітудному значенню виробленої генератором напруги, при цьому величину швидкості переміщення приймають пропорційною амплітуді миттєвої напруги, а напрямок...
Прецизійний спосіб визначення напрямку на точкове гамма-джерело
Номер патенту: 85911
Опубліковано: 10.12.2013
Автори: Білик Захар Валентинович, Сакун Олександр Валерійович, Григор'єв Олександр Миколайович, Марущенко Володимир Васильович
МПК: G01T 1/16, G01T 1/167, G01T 1/169
Мітки: прецизійний, гамма-джерело, точкове, спосіб, напрямку, визначення
Формула / Реферат:
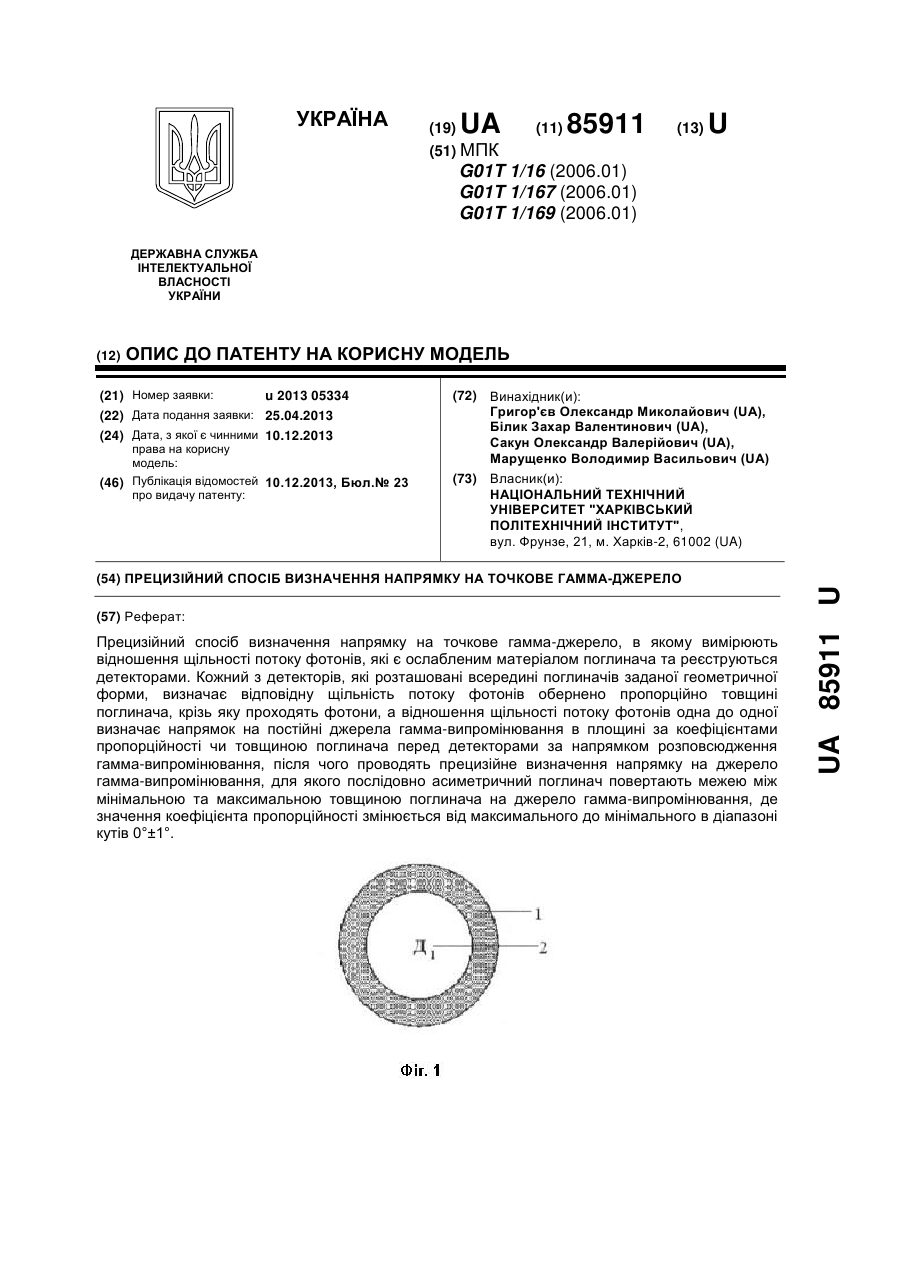
Прецизійний спосіб визначення напрямку на точкове гамма-джерело, в якому вимірюють відношення щільності потоку фотонів, які є ослабленим матеріалом поглинача та реєструються детекторами, який відрізняється тим, що кожний з детекторів, які розташовані всередині поглиначів заданої геометричної форми, визначає відповідну щільність потоку фотонів обернено пропорційно товщині поглинача, крізь яку проходять фотони, а відношення щільності потоку...
Спосіб цифрового визначення напрямку стабілізації суміщення фарб в аркушевих друкарських машинах
Номер патенту: 92747
Опубліковано: 26.08.2014
Автори: Карпенко Ірина Сергіївна, Морфлюк Валерій Федорович, Чуркін Володимир Вікторович
МПК: H03M 1/12, B41F 13/00
Мітки: стабілізації, цифрового, напрямку, друкарських, машинах, визначення, суміщення, аркушевих, спосіб, фарб
Формула / Реферат:
Спосіб цифрового визначення напрямку стабілізації суміщення фарб у аркушевих друкарських машинах, що включає апаратну реалізацію формування імпульсних сигналів при скануванні технологічних міток, які друкуються по обидві сторони аркуша, та аналіз часових параметрів сигналів, який відрізняється тим, що визначення напрямку стабілізації виконують перед входженням аркуша до друкарської секції, починаючи з другої.
Спосіб визначення азимута напрямку на земний предмет
Номер патенту: 42158
Опубліковано: 15.10.2001
Автор: Пилип'юк Ростислав Романович
МПК: G01C 1/00
Мітки: визначення, спосіб, земній, азимута, предмет, напрямку
Формула / Реферат:
Спосіб визначення азимута напрямку на .земний предмет, що передбачає спостереження світил у вертикалі земного предмета, який відрізняється тим, що у вертикалі земного предмета із спостереження пари зірок визначають різницю зенітних віддалей цих світил і обчислюють азимут вертикалі, в якій спостерігалися світила за формулою A=, вимірюють окулярним мікрометром теодоліта...
Система та спосіб визначення точного напрямку курсу транспортного засобу
Номер патенту: 104547
Опубліковано: 10.02.2014
Автор: Келлар Уільям
МПК: G01S 19/00, G01C 21/00
Мітки: точного, транспортного, система, напрямку, курсу, спосіб, визначення, засобу
Формула / Реферат:
1. Спосіб визначення точного напрямку курсу транспортного засобу, причому спосіб включає:визначення похибки вивірення курсу, яка є різницею між визначеним глобальною навігаційною супутниковою системою (GNSS) напрямком руху транспортного засобу та нерозв'язаним визначеним Інерціальним вимірювальним блоком (IMU) курсом транспортного засобу;корекцію похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах...
Попередній патент: Спосіб захисту електродвигуна від струмових перевантажень
Наступний патент: Стенд імітації фоно-цільової обстановки з атмосферним фільтром
Випадковий патент: Спосіб безконтактного керування комп'ютером