Спосіб визначення напрямку меридіана маятниковим гірокомпасом
Номер патенту: 101962
Опубліковано: 12.10.2015
Автори: Штефан Наталя Іллівна, Федоров Володимир Миколайович

Формула / Реферат
Спосіб визначення напрямку меридіана маятниковим гірокомпасом, що включає попереднє визначення напрямку меридіана за допомогою негіроскопічного вимірювача, орієнтування головної осі чутливого елемента гірокомпаса в північному напрямку, розаретування чутливого елемента гірокомпаса, вимір кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу, який відрізняється тим, що після орієнтування головної осі чутливого елемента гірокомпаса в північному напрямку здійснюють миттєвий, імпульсний розгін ротора гірокомпаса до максимальної кутової швидкості, забезпечують неконтактний підвіс чутливого елемента відносно корпуса гірокомпаса, а точний напрямок меридіана знаходять, мінімізуючи неспівпадання виміряних кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу та обрахованих відповідних кутів повороту його математичної моделі, заданої рівнянням
![]() ,
,
де ![]() - кут відхилення головної осі гірокомпаса від напрямку меридіана,
- кут відхилення головної осі гірокомпаса від напрямку меридіана, ![]() - кінетичний момент гірокомпаса;
- кінетичний момент гірокомпаса; ![]() - максимальне значення кінетичного моменту гірокомпаса,
- максимальне значення кінетичного моменту гірокомпаса, ![]() - показник затухання експоненти в законі зміни кінетичного моменту,
- показник затухання експоненти в законі зміни кінетичного моменту, ![]() - поточний час,
- поточний час, ![]() - неконтрольований зовнішній момент навколо вертикальної осі чутливого елемента гірокомпаса;
- неконтрольований зовнішній момент навколо вертикальної осі чутливого елемента гірокомпаса; ![]() - маятниковість гірокомпаса;
- маятниковість гірокомпаса; ![]() та
та ![]() - горизонтальна та вертикальна складові швидкості обертання Землі.
- горизонтальна та вертикальна складові швидкості обертання Землі.
Текст
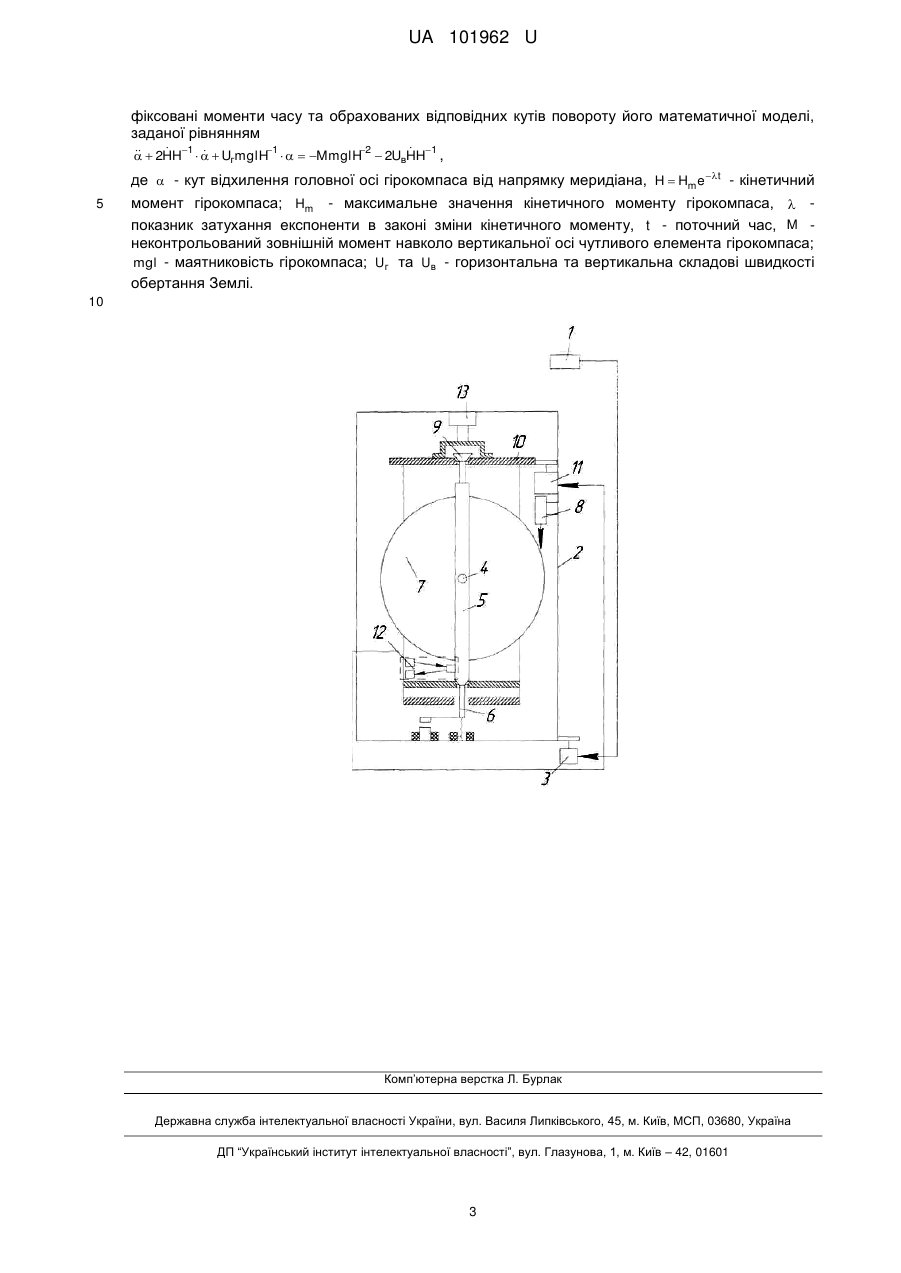
Реферат: UA 101962 U UA 101962 U 5 10 15 20 25 30 35 40 Корисна модель належить до галузі приладобудування та може бути використана при визначенні напрямку географічного меридіана наземними маятниковими гірокомпасами. Відомий "Спосіб визначення напрямку меридіана маятниковим гірокомпасом" (Воронков Н.Н., Кутырев В.В., Ашимов Н.М., Гироскопическое ориентирование. М, "Недра", 1980, с. 284293), який включає попереднє визначення напрямку меридіана за допомогою будь-якого з негіроскопічних вимірювачів, наприклад магнітного компаса, орієнтування головної осі чутливого елемента гірокомпаса в північному напрямку, розгін ротора гірокомпаса до номінальної кутової швидкості, розаретування чутливого елемента гірокомпаса, вимір кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу з одночасною підтримкою кутової швидкості обертання ротора сталою величиною, обрахування точного напрямку меридіана за наведеною формулою. Недоліком цього способу є те, що напрямок меридіана ототожнюється з положенням рівноваги коливань чутливого елемента. Наявність неконтрольованого зовнішнього моменту навколо вертикальної осі чутливого елемента призводить до зміщення положення рівноваги коливань, яке і є похибкою знаходження напрямку меридіана. Найбільш близьким аналогом є "Спосіб визначення меридіана маятниковим гірокомпасом" (А.С. СРСР №1035423, кл.G01C 19/38, опубл.15.08.1983), який включає попереднє визначення напрямку меридіана за допомогою будь-якого з негіроскопічних вимірювачів, наприклад магнітного компаса, орієнтування головної осі чутливого елемента гірокомпаса в північному напрямку, розгін ротора гірокомпаса до початкової кутової швидкості, розаретування чутливого елемента гірокомпаса, вимір кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу одночасно зі зміною кутової швидкості обертання ротора за лінійним законом, обрахування точного напрямку меридіана. Недоліком цього способу є недостатня точність, зумовлена наявністю механічного зв'язку між чутливим елементом та корпусом гірокомпаса, яка є необхідною для забезпечення лінійного закону зміни кутової швидкості обертання ротора під час виміру кутів повороту чутливого елемента, а також складність конструкції гірокомпаса, що реалізує цей спосіб, за рахунок наявності елементів, які дозволяють змінювати кутову швидкість ротора за лінійним законом. В основу корисної моделі поставлено задачу підвищення точності визначення напрямку меридіана за рахунок забезпечення відсутності механічного зв'язку між чутливим елементом та корпусом гірокомпаса, а також спрощення конструкції гірокомпаса за рахунок відмови від будьякого керування - в тому числі лінійного - швидкістю обертання його ротора під час виміру кутів повороту чутливого елемента. Поставлена задача вирішується тим, що згідно зі способом визначення напрямку меридіана маятниковим гірокомпасом, після орієнтування головної осі чутливого елемента гірокомпаса в південному напрямку здійснюють імпульсний, миттєвий розгін ротора до максимальної кутової швидкості, забезпечують неконтактний підвіс чутливого елемента відносно корпуса гірокомпаса, а точний напрямок меридіану знаходять, мінімізуючи неспівпадання виміряних кутів повороту чутливого елемента відносно корпуса гірокомпаса та обрахованих відповідних кутів повороту його математичної моделі, заданої рівнянням 2HH1 UгmglH 1 MmglH 2 2UвHH1 , t 45 50 55 де - кут відхилення головної вісі гірокомпаса від напрямку меридіана, H Hme Hm - максимальне значення кінетичного моменту гірокомпаса, кінетичний момент гірокомпаса; - показник затухання експоненти в законі зміни кінетичного моменту, t - поточний час, M неконтрольований зовнішній момент навколо вертикальної осі чутливого елемента гірокомпаса; mgl - маятниковість гірокомпаса; Uг та Uв - горизонтальна та вертикальна складові швидкості обертання Землі. Спосіб визначення напрямку меридіана маятниковим гірокомпасом полягає в наступному. За допомогою будь-якого негіроскопічного вимірювача, наприклад - магнітного компаса, попередньо визначають напрямок меридіана, встановлюють головну вісь гірокомпаса в північному напрямку, після чого імпульсно, миттєво, наприклад за допомогою порохових газів, піропатроном розганяють ротор гірокомпаса до максимальної кутової швидкості, забезпечують неконтактний підвіс чутливого елемента відносно корпуса гірокомпаса і розаретують його. Чутливий елемент починає рухатись в горизонтальній площині, при цьому кінетичний момент його зменшується за законом "падаючої" експоненти. Факт відсутності механічного зв'язку між чутливим елементом та корпусом гірокомпаса приносить подвійний ефект. По-перше, суттєво зменшується рівень збурень, що передаються від корпуса гірокомпаса чутливому елементу і, як наслідок, збільшується точність визначення напрямку меридіана. По-друге, відпадає 1 UA 101962 U 5 10 15 20 25 30 35 40 45 необхідність передачі струму до чутливого елемента, що суттєво спрощує конструкцію гірокомпаса, крім того, чутливий елемент в процесі роботи не нагрівається, а це зменшує рівень неконтрольованого зовнішнього моменту навколо його вертикальної вісі, що призводить до збільшення точності визначення меридіана. Порівнюючи кути повороту чутливого елемента відносно корпуса гірокомпаса, виміряні в фіксовані моменти часу, з обрахованими в ті ж моменти часу кутами повороту його математичної моделі, яка враховує експоненціальний характер зменшення швидкості обертання ротора гірокомпаса, мінімізують функцію, що характеризує їх неспівпадання. Параметри руху математичної моделі - початкові умови та величина неконтрольованого зовнішнього моменту навколо вертикальної осі чутливого елемента, - що відповідають мінімуму неспівпадання реального руху гірокомпаса та руху його математичної моделі, ідентифікуються окремо, отже точний напрямок меридіана в цьому випадку не містить помилки, зумовленої наявністю неконтрольованого зовнішнього моменту навколо вертикальної вісі чутливого елемента гірокомпаса. Суть корисної моделі пояснюється кресленням, де зображений гірокомпас, де: 1 - негіроскопічний вимірювач попереднього напрямку меридіана, наприклад - магнітний компас, 2 - корпус гірокомпаса, 3 - двигун повороту корпуса гірокомпаса в азимуті, 4 - головна вісь гірокомпаса, 5 - чутливий елемент гірокомпаса, 6 аретир, 7 - ротор, 8 - піропатрон, 9 - неконтактний підвіс, 10 - слідкуючий корпус, 11 - двигун повороту слідкуючого корпуса 10 відносно корпуса 2 гірокомпаса, 12 - датчик кута відносного положення чутливого елемента 5 та слідкуючого корпуса 10, 13 - датчик кута повороту чутливого елемента 5 (слідкуючого корпуса 10) відносно корпуса 2 гірокомпаса. Спосіб здійснюють наступним чином. За сигналом негіроскопічного вимірювача напрямку меридіана, наприклад - магнітного компаса 1, який є попереднім вимірювачем напрямку меридіана, корпус 2 гірокомпаса розвертають за допомогою двигуна 3 в азимуті таким чином, щоб головна вісь 4 гірокомпаса була спрямована на північ. В цей час чутливий елемент 5 гірокомпаса зафіксовано аретиром 6 відносно корпуса 2 гірокомпаса. В цьому зааретованому положенні ротор 7 розганяють за допомогою піропатрона 8 до максимальної кутової швидкості. Після цього приводять в дію неконтактний (наприклад - магнітний) підвіс 9, розаретують чутливий елемент 5, який починає повертатися в горизонтальній площині. Разом з чутливим елементом 5 відносно корпуса 2 гірокомпаса повертається і слідкуючий корпус 10. Цей поворот здійснюється двигуном 11 за допомогою сигналу з датчика 12 кута відносного положення чутливого елемента 5 та слідкуючого корпуса 10. Кути повороту чутливого елемента 5 (слідкуючого корпуса 10) відносно корпуса 2 гірокомпаса вимірюють датчиком 13 в фіксовані моменти часу. Після закінчення процесу отримання інформації з гірокомпаса виконують аретування чутливого елемента 5. Далі здійснюють процедуру мінімізації неспівпадання виміряних кутів повороту чутливого елемента 5 відносно корпуса 2 гірокомпаса та обрахованих відповідних кутів повороту його математичної моделі, в результаті якої отримують точний напрямок меридіана. Використання способу, який пропонується, дозволяє підвищити точність визначення напрямку географічного меридіана маятниковим гірокомпасом на нерухомій відносно Землі основі, оскільки реальний рух гірокомпаса порівнюється з рухом його математичної моделі, яка враховує особливості, зумовлені наявністю неконтрольованого зовнішнього моменту навколо вертикальної осі чутливого елемента. Запропоноване забезпечення неконтактного підвісу чутливого елемента також сприяє підвищенню точності визначення меридіана і спрощення конструкції гірокомпаса. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Спосіб визначення напрямку меридіана маятниковим гірокомпасом, що включає попереднє визначення напрямку меридіана за допомогою негіроскопічного вимірювача, орієнтування головної осі чутливого елемента гірокомпаса в північному напрямку, розаретування чутливогоелемента гірокомпаса, вимір кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу, який відрізняється тим, що після орієнтування головної осі чутливого елемента гірокомпаса в північному напрямку здійснюють миттєвий, імпульсний розгін ротора гірокомпаса до максимальної кутової швидкості, забезпечують неконтактний підвіс чутливого елемента відносно корпуса гірокомпаса, а точний напрямок меридіана знаходять, мінімізуючи неспівпадання виміряних кутів повороту чутливого елемента відносно корпуса гірокомпаса в 2 UA 101962 U фіксовані моменти часу та обрахованих відповідних кутів повороту його математичної моделі, заданої рівнянням 2HH1 UгmglH1 MmglH 2 2UвHH1 , де - кут відхилення головної осі гірокомпаса від напрямку меридіана, H Hme t - кінетичний 5 момент гірокомпаса; Hm - максимальне значення кінетичного моменту гірокомпаса, показник затухання експоненти в законі зміни кінетичного моменту, t - поточний час, M неконтрольований зовнішній момент навколо вертикальної осі чутливого елемента гірокомпаса; mgl - маятниковість гірокомпаса; Uг та Uв - горизонтальна та вертикальна складові швидкості обертання Землі. 10 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 19/38
Мітки: спосіб, меридіана, напрямку, визначення, маятниковим, гірокомпасом
Код посилання
<a href="https://ua.patents.su/5-101962-sposib-viznachennya-napryamku-meridiana-mayatnikovim-girokompasom.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення напрямку меридіана маятниковим гірокомпасом</a>
Спосіб визначення напрямку меридіана маятниковим гірокомпасом
Номер патенту: 101075
Опубліковано: 25.08.2015
Автор: Федоров Володимир Миколайович
МПК: G01C 19/38
Мітки: меридіана, визначення, гірокомпасом, спосіб, напрямку, маятниковим
Формула / Реферат:
Спосіб визначення напрямку меридіана маятниковим гірокомпасом, що включає попереднє визначення напрямку меридіана за допомогою негіроскопічного вимірювача, розгін ротора гірокомпаса до номінальної кутової швидкості, розаретування чутливого елемента гірокомпаса, вимір кутів повороту чутливого елемента відносно корпуса гірокомпаса в фіксовані моменти часу, який відрізняється тим, що після попереднього визначення напрямку меридіана головну вісь...
Спосіб визначення швидкості і напрямку переміщення гостряка стрілкового переводу
Номер патенту: 70560
Опубліковано: 15.10.2004
Автор: Парфьонов Володимир Іванович
МПК: B61L 7/00
Мітки: напрямку, швидкості, стрілкового, спосіб, переводу, гостряка, визначення, переміщення
Формула / Реферат:
Спосіб визначення швидкості і напрямку переміщення гостряка стрілкового переводу, при якому лінійне переміщення гостряка перетворюють в обертове барабана з віссю, на якій закріплений генератор постійного струму, який відрізняється тим, що швидкість переміщення гостряка визначають по амплітудному значенню виробленої генератором напруги, при цьому величину швидкості переміщення приймають пропорційною амплітуді миттєвої напруги, а напрямок...
Прецизійний спосіб визначення напрямку на точкове гамма-джерело
Номер патенту: 85911
Опубліковано: 10.12.2013
Автори: Марущенко Володимир Васильович, Білик Захар Валентинович, Григор'єв Олександр Миколайович, Сакун Олександр Валерійович
МПК: G01T 1/167, G01T 1/169, G01T 1/16
Мітки: спосіб, визначення, точкове, напрямку, гамма-джерело, прецизійний
Формула / Реферат:
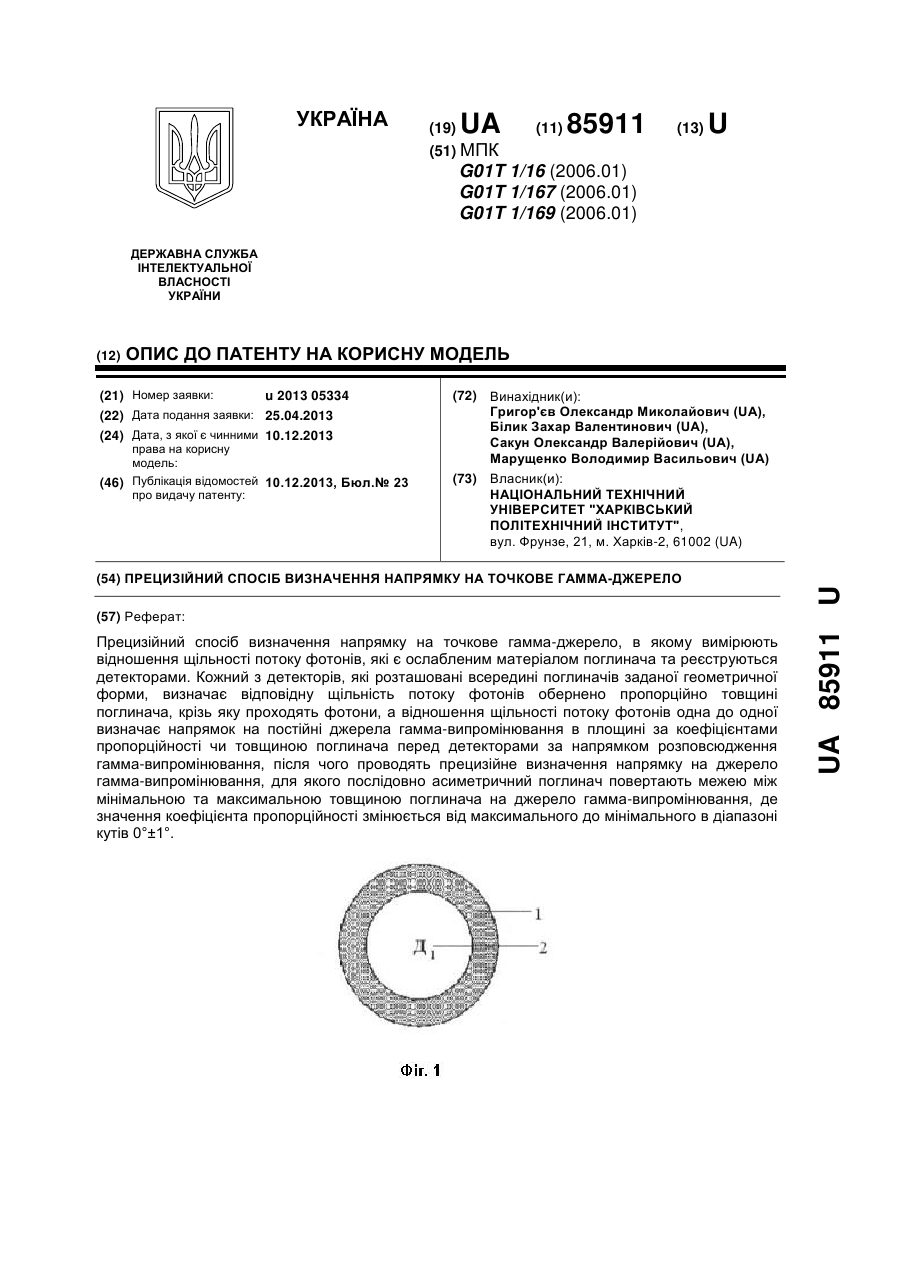
Прецизійний спосіб визначення напрямку на точкове гамма-джерело, в якому вимірюють відношення щільності потоку фотонів, які є ослабленим матеріалом поглинача та реєструються детекторами, який відрізняється тим, що кожний з детекторів, які розташовані всередині поглиначів заданої геометричної форми, визначає відповідну щільність потоку фотонів обернено пропорційно товщині поглинача, крізь яку проходять фотони, а відношення щільності потоку...
Спосіб визначення напрямку на постійні точкові джерела гамма-випромінювання в просторі
Номер патенту: 85910
Опубліковано: 10.12.2013
Автори: Марущенко Володимир Васильович, Сакун Олександр Валерійович, Григор'єв Олександр Миколайович, Білик Захар Валентинович
МПК: G01T 1/167, G01T 1/16, G01T 1/169
Мітки: гамма-випромінювання, постійні, джерела, просторі, напрямку, визначення, спосіб, точкові
Формула / Реферат:
Спосіб визначення напрямку на постійні точкові джерела гамма-випромінювання в просторі, в якому визначення напрямку на гамма-джерело проводять за вимірюванням відношення щільностей потоку фотонів, що реєструють детекторами, який відрізняється тим, що детектори розташовують всередині поглиначів заданої геометричної форми, яка визначає відповідну щільність потоку фотонів обернено пропорційно товщині поглинача, крізь яку проходять фотони, а...
Система та спосіб визначення точного напрямку курсу транспортного засобу
Номер патенту: 104547
Опубліковано: 10.02.2014
Автор: Келлар Уільям
МПК: G01C 21/00, G01S 19/00
Мітки: точного, напрямку, засобу, курсу, система, спосіб, визначення, транспортного
Формула / Реферат:
1. Спосіб визначення точного напрямку курсу транспортного засобу, причому спосіб включає:визначення похибки вивірення курсу, яка є різницею між визначеним глобальною навігаційною супутниковою системою (GNSS) напрямком руху транспортного засобу та нерозв'язаним визначеним Інерціальним вимірювальним блоком (IMU) курсом транспортного засобу;корекцію похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах...
Попередній патент: Спосіб хірургічного лікування оніхокриптозу з однобічним вростанням нігтя та формуванням епоніхеальних гіпергрануляцій
Наступний патент: Світлодіодна люстра з комбінованим електроживленням
Випадковий патент: Спосіб фіксування створеного електронного цифрового підпису (печатки) та шифрування даних