Спосіб управління завантаженням і розвантаженням бункера насипним матеріалом
Номер патенту: 102910
Опубліковано: 27.08.2013
Автори: Мостовий Борис Іванович, Монастирський Віталій Федорович, Брагінець Дмитро Дмитрийович, Смірнов Андрій Миколайович, Кірія Руслан Вісаріонович, Максютенко Валерій Юрійович


Формула / Реферат
Спосіб управління завантаженням і розвантаженням бункера насипним матеріалом, що включає контроль верхнього, нижнього рівнів завантаження і безперервне вимірювання поточного рівня матеріалу, який надходить до бункера, який відрізняється тим, що для кожного моменту часу контролюють продуктивність конвеєра, що завантажує у бункер із живильником, і встановлюють продуктивність конвеєра більшу, ніж у живильника, порівнюють верхній та поточний рівні, і, при досягненні верхнього рівня, змінюють продуктивність живильника на більшу, ніж на конвеєрі; порівнюють дані поточного та нижнього рівнів і, при досягненні нижнього рівня, повторюють вказану вище послідовність операцій.
Текст
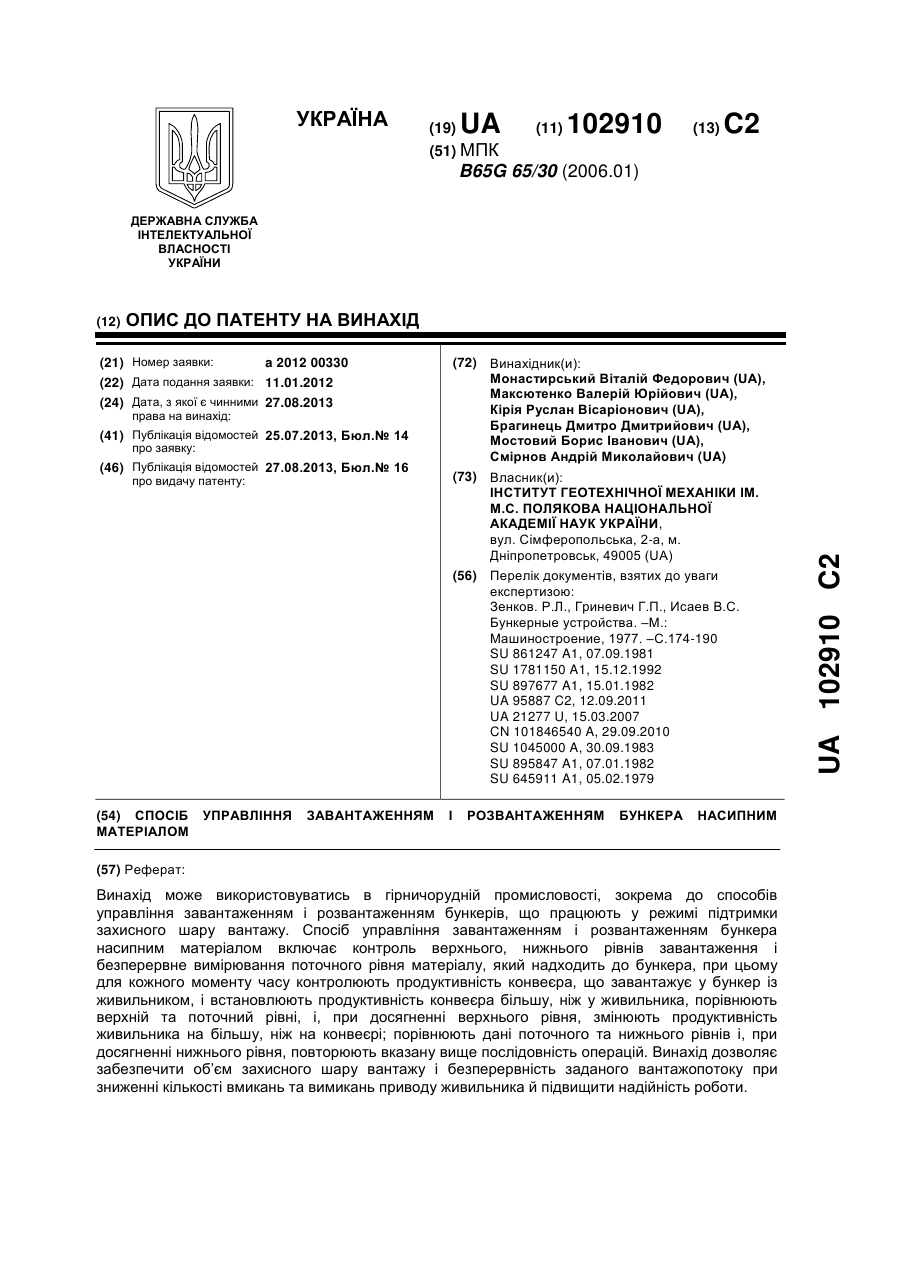
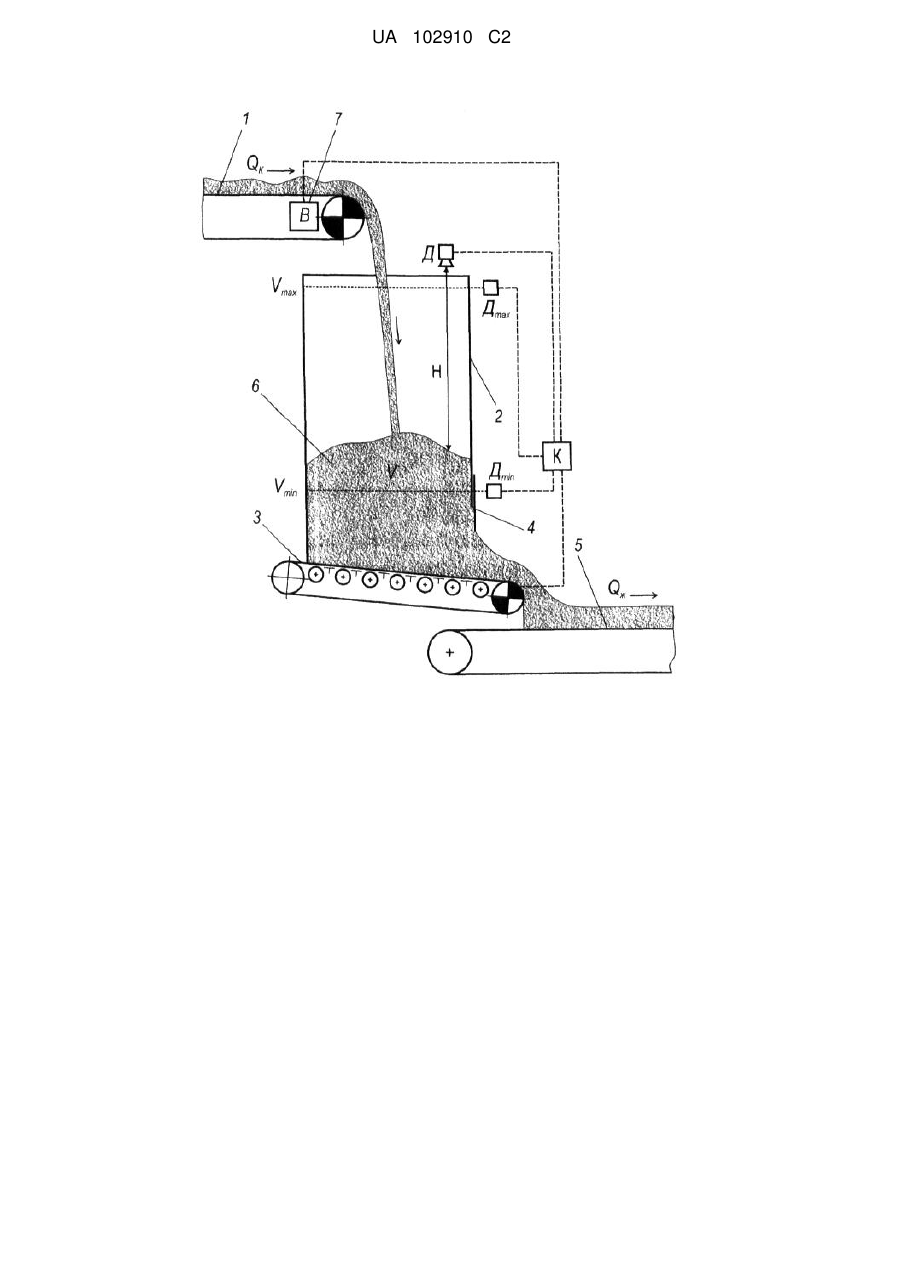
Реферат: Винахід може використовуватись в гірничорудній промисловості, зокрема до способів управління завантаженням і розвантаженням бункерів, що працюють у режимі підтримки захисного шару вантажу. Спосіб управління завантаженням і розвантаженням бункера насипним матеріалом включає контроль верхнього, нижнього рівнів завантаження і безперервне вимірювання поточного рівня матеріалу, який надходить до бункера, при цьому для кожного моменту часу контролюють продуктивність конвеєра, що завантажує у бункер із живильником, і встановлюють продуктивність конвеєра більшу, ніж у живильника, порівнюють верхній та поточний рівні, і, при досягненні верхнього рівня, змінюють продуктивність живильника на більшу, ніж на конвеєрі; порівнюють дані поточного та нижнього рівнів і, при досягненні нижнього рівня, повторюють вказану вище послідовність операцій. Винахід дозволяє забезпечити об’єм захисного шару вантажу і безперервність заданого вантажопотоку при зниженні кількості вмикань та вимикань приводу живильника й підвищити надійність роботи. UA 102910 C2 (12) UA 102910 C2 UA 102910 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний спосіб управління завантаженням і розвантаженням бункера може бути використаний в системах конвеєрних ліній гірничорудної промисловості для завантаження і розвантаження бункерів, що працюють в режимі підтримки захисного шару вантажу, який запобігає прямому попаданню потоку вантажу на живильник і конвеєрне устаткування. Відомі способи розвантаження вантажу з бункера в режимі підтримки захисного шару вантажу, де розвантажуваний з бункера вантажопотік вмикається, якщо кількість вантажу в бункері досягає максимального значення, і вимикається, якщо кількість вантажу в бункері стає менше припустимого мінімального значення [1]. Недоліком управління такими установками є розвантаження на збільшеній максимальній хвилинній продуктивності вантажопотоку, який знаходиться в бункері, що призводить до частих вмикань і вимикань розвантажувального устаткування на бункерах з малою місткістю і значною нерівномірністю завантаження підбункерного конвеєра. Відомі технічні рішення для підтримки і регулювання захисного шару вантажу в бункері з пристроями контролю рівнів матеріалу в бункері, що містять декілька датчиків рівня, встановлених на контрольованих відмітках по всій висоті бункера, де блоком управління регулюють механізмами розвантажувального устаткування [2, 3]. Недоліком цих пристроїв є ненадійність роботи і незручність обслуговування. Найближчим до запропонованого способу є спосіб управління завантаженням конвеєрів сипким матеріалом, який полягає в тому, що вимірюють кількість матеріалу, що надходить до кожного бункера в одиницю часу; визначають для всіх бункерів середнє значення кількості матеріалу, що надходить в одиницю часу, і середній рівень та порівнюють їх з відповідними зміряними значеннями; а зміну кількості матеріалу, що надходить до кожного бункера, призводить по розбіжності між порівнюваними величинами [4]. Недоліком даного способу є суттєве ускладнення системи управління завантаженням бункера, пов'язане з необхідністю вимірювання кількості вантажу, що надходить до кожного бункеру в одиницю часу, за допомогою спеціального датчика. В основу способу управління завантаженням і розвантаженням бункера насипним матеріалом поставлена задача удосконалення способу управління завантаженням бункеру шляхом регулювання продуктивності живильника, при якій забезпечується об'єм захисного шару вантажу і безперервність заданого вантажопотоку, що призводить до захисту живильника та дна бункера від прямого попадання вантажу, і, як наслідок, знижує кількість вмикань та вимикань приводу живильника і підвищує надійність роботи. Поставлена задача вирішується тим, що у способі управління завантаженням і розвантаженням бункера насипним матеріалом, що включає контроль верхнього, нижнього рівнів завантаження і безперервне вимірювання поточного рівня матеріалу, який надходить до бункера, згідно з винаходом, для кожного моменту часу контролюють продуктивність конвеєру, що завантажує бункер із живильником, і встановлюють продуктивність конвеєра більшу, ніж у живильнику, порівнюють верхній та поточний рівні, і, при досягненні верхнього рівня, змінюють продуктивність живильника на більшу, ніж на конвеєрі; порівнюють дані поточного та нижнього рівнів, і, при досягненні нижнього рівня, повторюють вказану вище послідовність операцій. В результаті запропонованого способу управління при нерівномірній подачі вантажу в бункер і підтримці його в заданому об'ємі блоком управління відстежується поточний рівень вантажу, що надходить і змінює продуктивність живильника через погонне навантаження або швидкість, забезпечуючи безперервне транспортування, що сприяє зменшенню кількості вмикань-вимикань, а також підвищує надійність роботи системи конвеєр-бункер-конвеєр. На кресленні показана схема пристрою, що реалізує запропонований спосіб управління. Вантаж з добункерного конвеєра 1 надходить в бункер 2, з якого за допомогою живильника 3 вивантажується через шибер 4 на підбункерний конвеєр 5. В бункері безперервно контролюється датчиком Д на висоті Н об'єм V захисного шару вантажу 6, який постійно знаходиться не нижче за відмітку мінімального об'єму Vmin захисного шару, який контролюється датчиком Дmіn. На схемі датчик Дmах контролює верхній об'єм вантажу Vmax. На добункерному конвеєрі встановлено конвеєрні ваги 7, що вимірюють погонне навантаження для визначення продуктивності Qк вантажу, який надходить до бункеру, та блоком управління К відстежується поточна продуктивність Qж і вивантажування з живильника. Запропонований спосіб управління здійснюється таким чином. Нерівномірний вантажопотік, що рухається на добункерному конвеєрі 1, вимірюється конвеєрними вагами 7 і визначається погонне навантаження для обчислення продуктивності Qк. Спочатку встановлюють продуктивність добункерного конвеєру 1 більше, ніж в живильнику 3, для накопичення вантажу в бункері 2. В бункері безперервно контролюється датчиком Д на висоті Н поточний об'єм V захисного шару вантажу, який може змінюватися залежно від 1 UA 102910 C2 5 10 накопичення вантажу. Блоком управління К порівнюються верхній та поточний рівень, і при досягненні верхнього рівня змінюють продуктивність живильника Qж через швидкість або погонне навантаження на більшу, ніж на добункерному конвеєрі. Потім порівнюють дані поточного та нижнього рівнів, і, при досягненні нижнього рівня, повторюють вказану вище послідовність операції. Джерела інформації:: 1. Зенков Р.Л. Бункерные устройства / Зенков Р.Л., Гриневич Г.П., Исаев В.С. - М: Машиностроение, 1977, - С. 174-190. 2. Авт. св. № 861247 СССР, 07.09.1981. Бюл. № 33. 3. Авт. св. № 1781150 СССР, 15.12.1992. Бюл. № 46. 4. Авт. св. 897677, СССР, 15.01.1982. Бюл. № 2. ФОРМУЛА ВИНАХОДУ 15 20 Спосіб управління завантаженням і розвантаженням бункера насипним матеріалом, що включає контроль верхнього, нижнього рівнів завантаження і безперервне вимірювання поточного рівня матеріалу, який надходить до бункера, який відрізняється тим, що для кожного моменту часу контролюють продуктивність конвеєра, що завантажує у бункер із живильником, і встановлюють продуктивність конвеєра більшу, ніж у живильника, порівнюють верхній та поточний рівні, і, при досягненні верхнього рівня, змінюють продуктивність живильника на більшу, ніж на конвеєрі; порівнюють дані поточного та нижнього рівнів і, при досягненні нижнього рівня, повторюють вказану вище послідовність операцій. 2 UA 102910 C2 Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling loading and unloading hopper with bulk material
Автори англійськоюMonastyrskyi Vitalii Fedorovych, Maksiutenko Valerii Yuriiovych, Kiriia Ruslan Visarionovych, Brahynets Dmytro Dmytryiovych, Mostovyi Borys Ivanovych, Smirnov Andrii Mykolaiovych
Назва патенту російськоюСпособ управления загрузкой и разгрузкой бункера насыпным материалом
Автори російськоюМонастырский Виталий Федорович, Максютенко Валерий Юрьевич, Кирия Руслан Виссарионович, Брагинец Дмитрий Дмитриевич, Мостовой Борис Иванович, Смирнов Андрей Николаевич
МПК / Мітки
МПК: B65G 65/30
Мітки: завантаженням, матеріалом, бункера, спосіб, управління, розвантаженням, насипним
Код посилання
<a href="https://ua.patents.su/5-102910-sposib-upravlinnya-zavantazhennyam-i-rozvantazhennyam-bunkera-nasipnim-materialom.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління завантаженням і розвантаженням бункера насипним матеріалом</a>
Спосіб управління бункерами, що працюють у системах конвеєрного транспорту вугільних шахт
Номер патенту: 67202
Опубліковано: 10.02.2012
Автори: Брагінець Дмитро Дмитрийович, Максютенко Валерій Юрійович, Смірнов Андрій Миколайович, Кірія Руслан Вісаріонович, Кравчук Олексій Леонідович, Уколов Сергій Васильович, Касандін Роман Вікторович
МПК: B65G 65/30
Мітки: транспорту, працюють, шахт, системах, конвеєрного, управління, бункерами, спосіб, вугільних
Формула / Реферат:
Спосіб управління бункерами, що працюють у системах конвеєрного транспорту вугільних шахт, який включає контроль мінімального і максимального рівня захисного шару вантажу в бункері та обробку інформації блоком управління, який відрізняється тим, що живильник вимикають при досягненні мінімального значення захисного шару вантажу, за часом заповнення бункера за допомогою блока управління обчислюють середнє значення вантажопотоку, що...
Спосіб автоматичного управління завантаженням потоково-транспортної лінії сипких матеріалів
Номер патенту: 95887
Опубліковано: 12.09.2011
Автори: Єрьомін Максим Анатолійович, Кір'язов Іван Миколайович, Степанов Михайло Тимофійович, Аннаев Батир Сейдуллаєвич, Шестопалов Станіслав Володимирович, Веридусов Петро Олександрович, Герасімов Валерій Володимирович, Хобін Віктор Андрійович, Тимофєєв Олексій Олександрович
МПК: G01G 11/12, B65G 17/00, B65G 47/46, B65G 65/42
Мітки: завантаженням, сипких, матеріалів, спосіб, потоково-транспортної, лінії, управління, автоматичного
Формула / Реферат:
1. Спосіб автоматичного управління завантаженням потоково-транспортної лінії сипких матеріалів, що передбачає вимірювання навантаження приводного електродвигуна норії, порівняння виміряної величини із заданим значенням навантаження приводного електродвигуна норії для конкретного виду сипкого матеріалу і, у разі їх невідповідності, зміну продуктивності розвантажувального пристрою бункера до досягнення рівності виміряного і заданого значень...
Спосіб автоматичного керування завантаженням потоково-транспортної лінії сипких матеріалів
Номер патенту: 34335
Опубліковано: 11.08.2008
Автори: Хобін Віктор Андрійович, Андріященко Георгій Володимирвоич
МПК: B65G 17/00
Мітки: керування, матеріалів, лінії, завантаженням, потоково-транспортної, спосіб, сипких, автоматичного
Формула / Реферат:
Спосіб автоматичного керування завантаженням потоково-транспортної лінії сипких матеріалів, що вимірює навантаження приводного електродвигуна норії, який відрізняється тим, що зміряне значення навантаження приводного електродвигуна норії порівнюють із заданим значенням навантаження, для конкретного виду сипкого матеріалу, і у разі їх невідповідності, продуктивність розвантажувального пристрою бункера змінюють для досягнення їх рівності.
Вібраційний секціонований живильник з бічним розвантаженням
Номер патенту: 68354
Опубліковано: 26.03.2012
Автори: Брагінець Дмитро Дмитрович, Мостовий Борис Іванович, Монастирський Віталій Федорович, Лисиця Микола Іванович, Кірія Руслан Вісаріонович, Віноградов Віктор Васильович, Максютенко Валерій Юрійович
МПК: B65G 27/32, E21F 13/08
Мітки: розвантаженням, бічним, живильник, секціонований, вібраційний
Формула / Реферат:
Вібраційний секціонований живильник з бічним розвантаженням, що містить подовжньо нахилену платформу, яка спирається переднім кінцем через пружний елемент на робочий орган привідної секції, яка коливається, а заднім шарнірно сполучена зі стінкою бункера, який відрізняється тим, що платформа і привідна секція виконані у вигляді несиметричного щодо центральної осі жолоба параболічної форми і нахилені до бічного розвантаження, при цьому висота...
Спосіб контролю рівня розплавленого матеріалу в печі і управління завантаженням шихти в піч та пристрій для його реалізації
Номер патенту: 14877
Опубліковано: 30.04.1999
Автор: Сікора Любомир Степанович
МПК: G01F 23/284, C03B 5/00
Мітки: завантаженням, рівня, шихти, матеріалу, управління, печі, контролю, реалізації, пристрій, спосіб, піч, розплавленого
Формула / Реферат:
1. Способ контроля уровня расплавленного материала в печи и управления загрузкой шихты в печь, включающий зондирование лазерным лучом контролируемой среды, прием отраженного от среды сигнала и распределение его по двум каналам в зависимости от положения луча по отношению к заданной линии уровня расплавленного материала посредством плоской двухкоординатной матрицы фотоприемника, преобразование его в электрический сигнал, усиление его и...
Попередній патент: Система контролю положення зсувного масиву
Наступний патент: Емалевий шлікер для одержання безфтористих покриттів блакитного кольору
Випадковий патент: Низькотоксична сигарета з наночастинками благородних металів