Спосіб контролю рівня розплавленого матеріалу в печі і управління завантаженням шихти в піч та пристрій для його реалізації
Формула / Реферат
1. Способ контроля уровня расплавленного материала в печи и управления загрузкой шихты в печь, включающий зондирование лазерным лучом контролируемой среды, прием отраженного от среды сигнала и распределение его по двум каналам в зависимости от положения луча по отношению к заданной линии уровня расплавленного материала посредством плоской двухкоординатной матрицы фотоприемника, преобразование его в электрический сигнал, усиление его и формирование сигнала контроля и управления, отличающийся тем, что зондирующий луч подвергают пространственно-временной модуляции, а отраженный оптический сигнал, преобразованный в электрический, модулируют по амплитуде за счет перераспределения луча в секторах плоской двухкоординатной матрицы фотоприемника, посредством изменения положения луча при смещении уровня поверхности среды, причем электрический сигнал перед усилением фильтруют и ограничивают по максимуму и минимуму, а после усиления повторно фильтруют и усиливают, с последующей фильтрацией его по низкой частоте, повторно ограничивают по максимуму и минимуму, усиливают, перетирают, проводят скользящее интегрирование, суммирование и вычитание, формируя сигналы, пропорциональные соответственно величине смещения уровня расплавленного материала от заданного уровня и величины интенсивности луча и по пороговым значениям сигнала вырабатывают сигналы индикации уровня и интенсивности, а сигнал управления дополнительно обрабатывают посредством робастного фильтра и по пороговым значениям его вырабатывают сигнал управления загрузкой.
2. Устройство контроля уровня расплавленного материала в печи и управления загрузкой шихты в печь, содержащее источник лазерного излучения, плоскую двухкоординатную матрицу фотоприемника, каждый выход которого соединен с одним из двух входов блока обработки сигнала, выходы которого соединены со входами блока управления, выход которого соединен входами исполнительного механизма, отличающееся тем, что в устройство дополнительно введен пространственно-временной модулятор лазерного луча, а блок обработки сигнала включает два канала, каждый из которых содержит последовательно соединенные первый полосовой фильтр, вход которого является входом блока обработки сигнала, первый ограничитель уровня, первый усилитель, второй полосовой фильтр, второй усилитель фильтр низких частот, второй ограничитель уровня, третий усилитель, детектор огибающей, интегратор, сумматор, причем инверсный вход сумматора первого канала соединен с выходом интегратора второго канала, а выход сумматора второго канала соединен с выходом интегратора первого канала, а его выход соединен с индикатором интенсивности луча, выход сумматора первого канала соединен с индикатором уровня и входом робастного фильтра, выход которого соединен с входом блока формирования образа динамической ситуации, выходы которого являются выходами блока обработки сигнала и соединены со входами блока управления, который содержит последовательно соединенные стохастический процессор, блок формирования команд и блок оперативной памяти, причем входы стохастического процессора являются входами блока управления, а выход блока оперативной памяти является выходом блока управления.
3. Устройство по п.2, отличающееся тем, что робастный фильтр содержит последовательно соединенные первый ограничитель уровня, скользящий интегратор и второй ограничитель уровня, причем вход первого ограничителя уровня является входом робастного фильтра, а выход второго ограничителя уровня является выходом робастного фильтра.
4. Устройство по п.2, отличающееся тем, что блок формирования образа динамической ситуации содержит аналого-цифровой преобразователь рангов, вход которого является входом блока формирования образа динамической ситуации, а выходы соединены с входами интегратора-сумматора, первого и второго формирователей функционалов и формирователя плотности вероятностей, выходы которых соединены соответственно с входами индикатора образа динамической ситуации, а вторые входы первого и второго формирователей функционалов и формирователя плотности вероятностей соединены с задатчиком пороговых значений, причем выходы интегратора-сумматора и аналого-цифрового преобразователя рангов являются выходами блока формирования образа динамической ситуации.
5. Устройство по п.2, отличающееся тем, что стохастический процессор содержит задающий генератор тактовых импульсов, выход которого соединен с входом первого делителя, первый выход которого соединен с первыми входами первой и второй схем "И", а второй выход - с входом второго делителя, выход которого соединены с входами дешифратора, выход которого соединен с входом первого триггера и входами формирователя установочного импульса и формирователя установки нуля, выходы которых соответственно соединены с первым и вторым входами первого и второго счетчиков, выходы которых являются выходами стохастического процессора, двухполярный переключатель, первый выход которого соединен с первыми входами первой и второй схем "ИЛИ", а вторые входы схем "ИЛИ" являются входами стохастического процессора, а второй выход двухполярного переключателя и выходы схем "ИЛИ" являются выходами стохастического процессора, переключатель рангов, входы которого являются входами стохастического процессора, а выходы соединены с третьими входами первой и второй схем "И" соответственно, выходы которых соединены с третьими входами первого и второго счетчиков соответственно, причем вторые сходы схем "И" соединены с выходом первого триггера, а выход кодового переключателя соединен с четвертыми входами первого и второго счетчиков.
6. Устройство по п.4, отличающееся тем, что формирователь функционалов содержит цифро-аналоговый преобразователь, входы которого являются входами формирователя функционалов, а выходы соединены со входами суммирующего двойного интегратора, выход которого соединен с первым входом порогового устройства, второй вход которого является вторым входом формирователя функционалов, а выход порогового устройства является выходом формирователя функционалов.
Текст
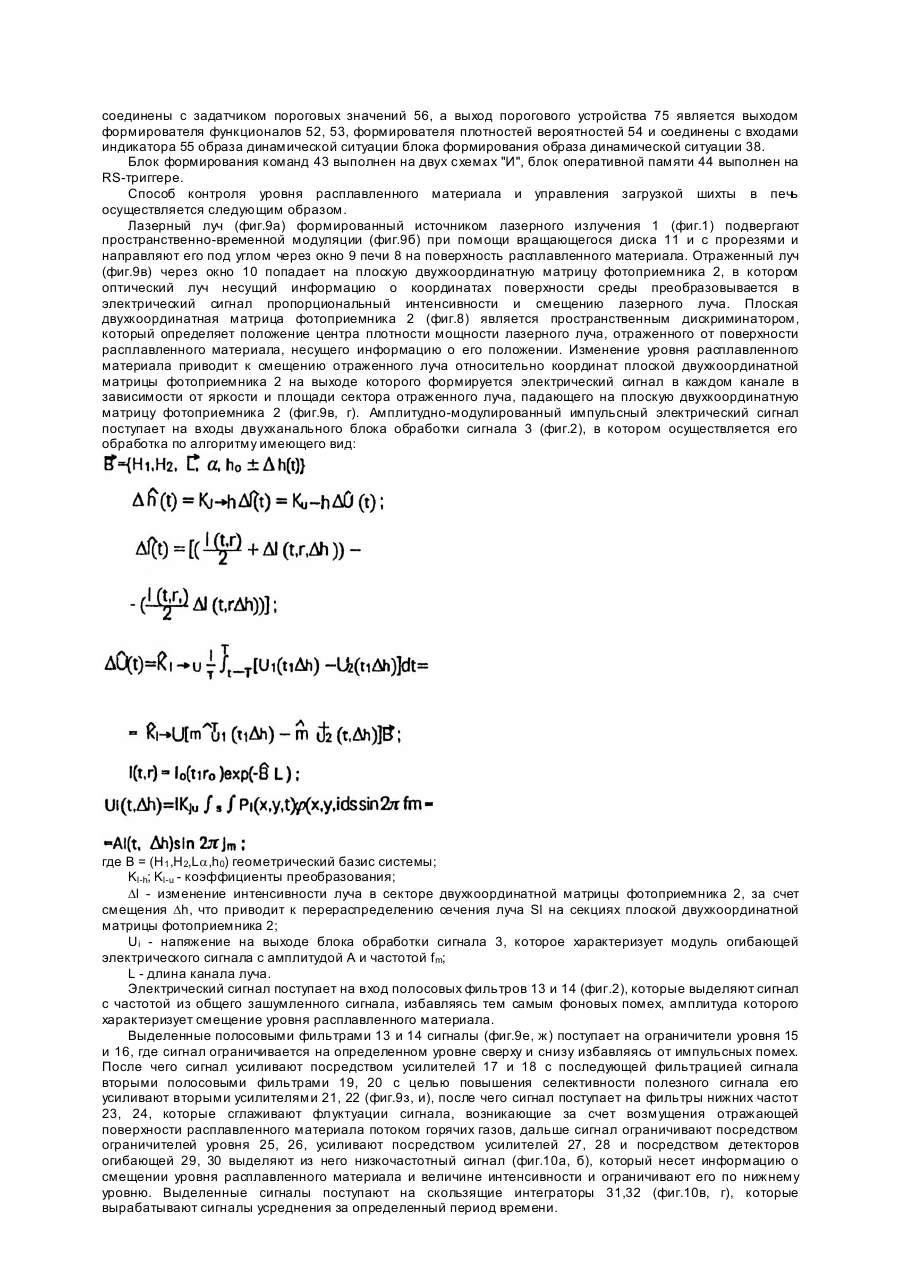
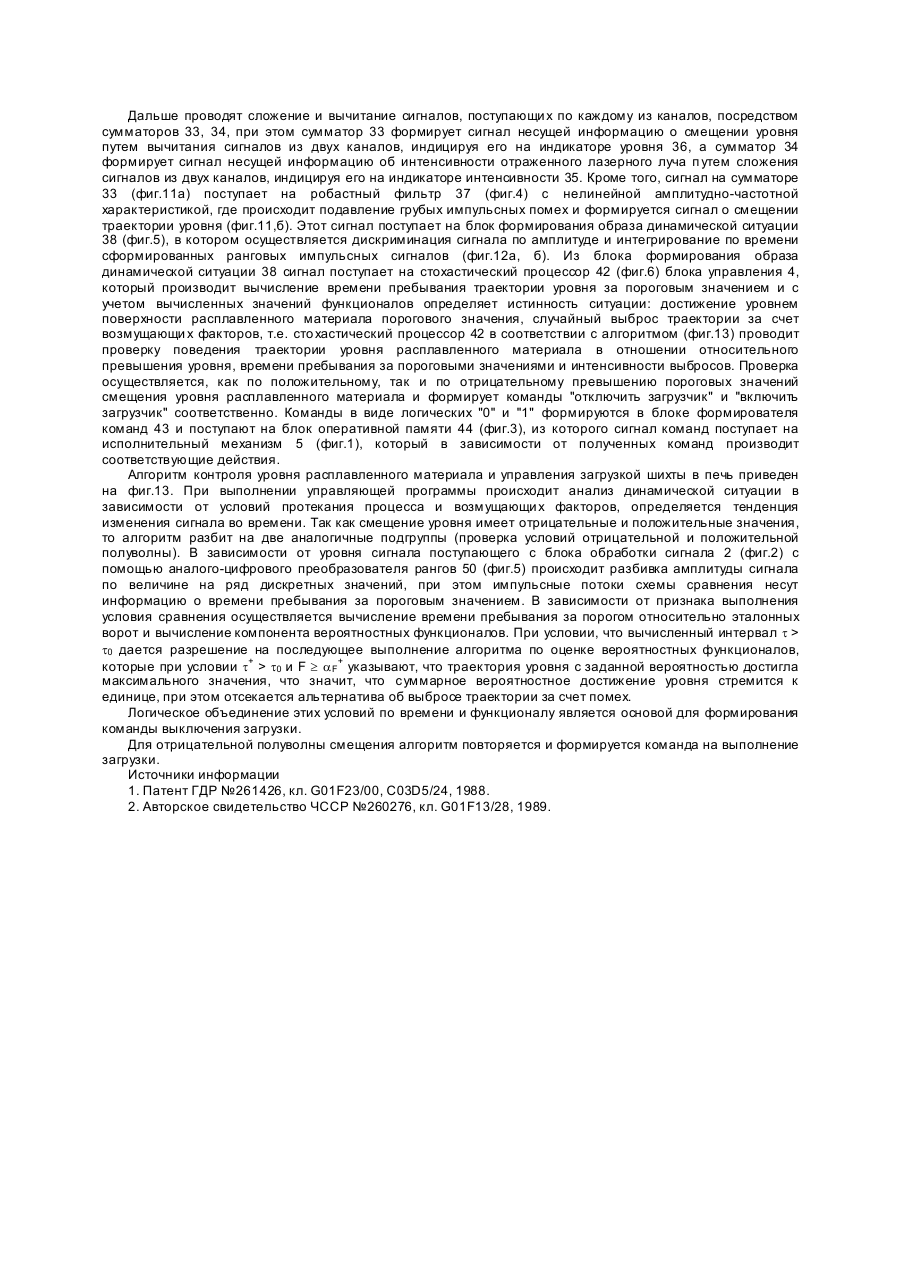
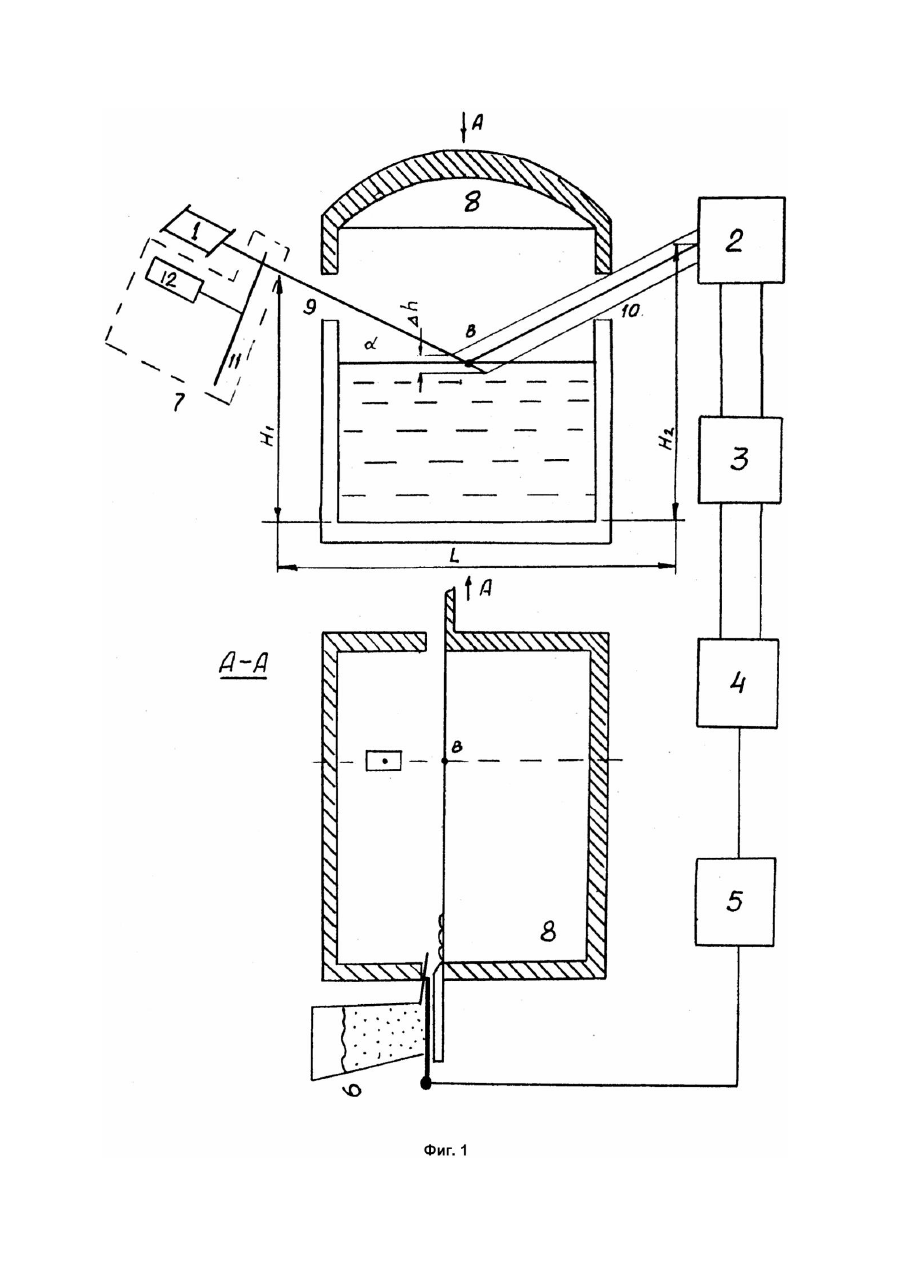
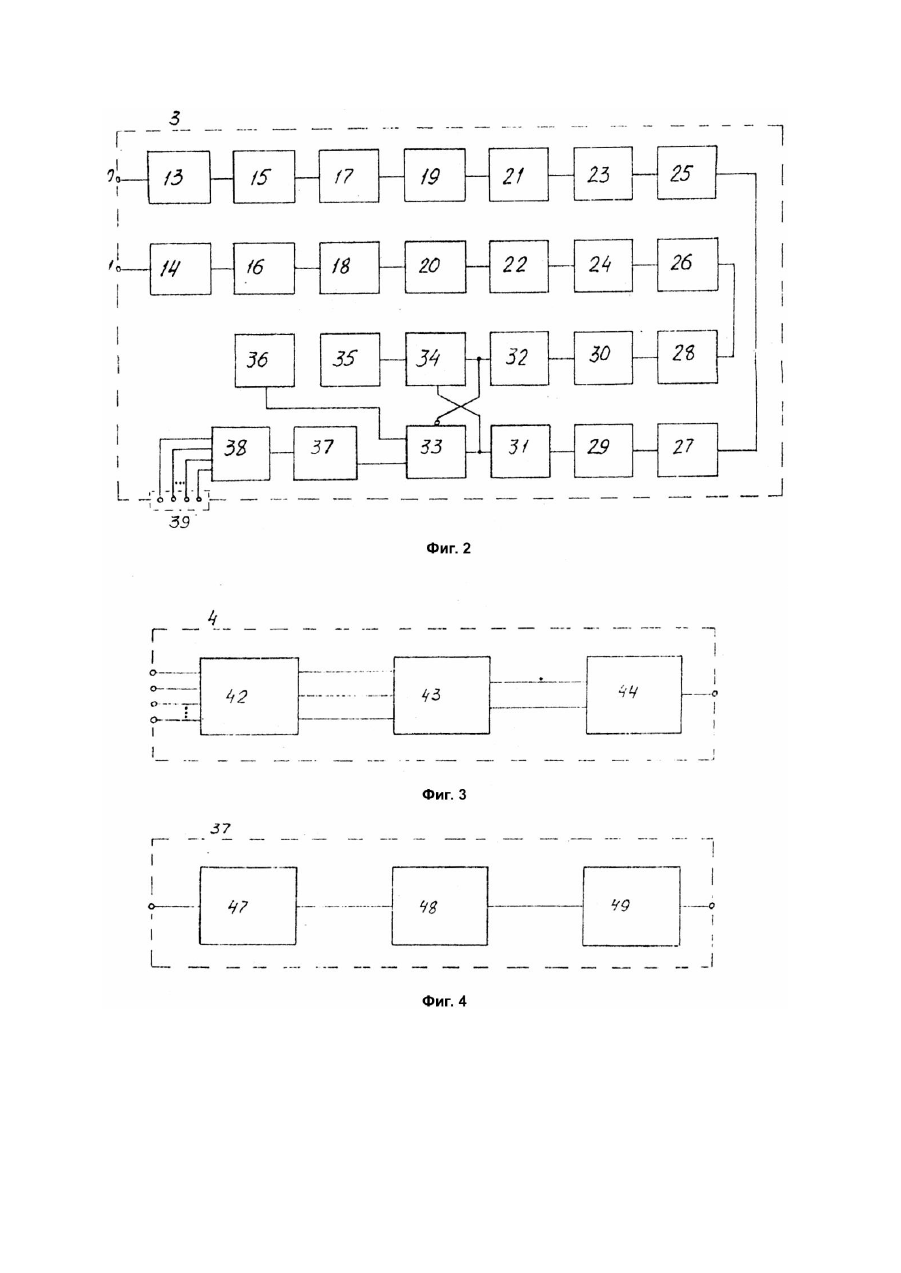
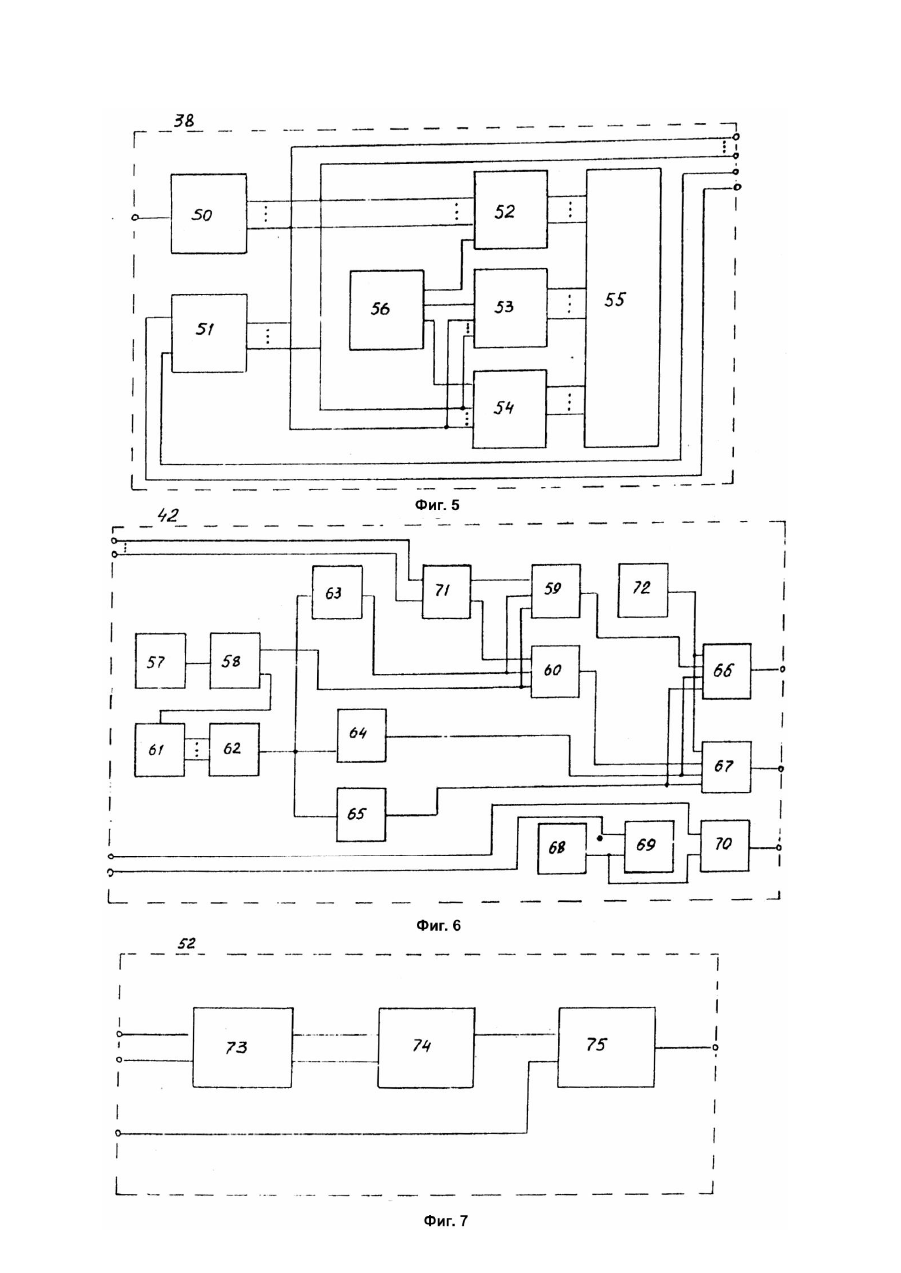
Изобретение относится к контрольно-измерительной технике и системе управления и может быть использовано для бесконтактного измерения уровня расплавленного материала в печи и управления загрузкой шихты в печи, в частности в стекловаренной печи. Известен способ и устройство для измерения уровня расплавленного материала в плавильной ванне стекловаренной печи [1], в котором два пучка света поочередно под углом подают на поверхность расплавленного материала и после отражения лучей преобразовывают их в последовательность электрических импульсов, на основании которых вычислительное устройство определяет значение уровня среды. За один измерительный цикл один пучок света независимо, а другой в зависимости от уровня поверхности расплавленного материала освещают фотоэлектрический элемент приемника. После чего свет прерывают. Сетевые пучки поступают от двух источников света с отдельными системами управления для каждого источника и двумя объединенными световодными кабелями. Принятые фотоэлектрическим элементом отраженные лучи света преобразовываются в электрические сигналы, которые обрабатываются вычислительным устройством. Устройство, реализующее описанный способ, содержит два источника света со своими системами управления, световодные кабели, фотоэлектрический элемент и вычислительное устройство. Описанный способ обладает низкой точностью измерения при наличии возмущающи х поверхность измерения факторов, а устройство является сложным по конструкции, так как требует два источника света, световод, а также систему управления источниками света. Кроме того, известный способ и устройство позволяют измерять только уровень материала исключив управление загрузкой шихты в печь. Наиболее близким по технической сущности к заявляемому способу и устройству для его реализации, является устройству контроля и регулирования высоты уровня расплавленного материала в печи посредством лазерного луча [2], которое содержит источник лазерного излучения, плоскую двухкоординатную матрицу фотоприемника, каждый выход которой соединен с одним из двух входов блока обработки сигнала, выход которого соединен с блоком управления, который соединен через вибратор с исполнительным механизмом. Способ по данному изобретению осуществляется путем подачи зондирующего лазерного луча на поверхность контролируемой среды, приема отраженного луча путем распределения его по двух каналах в зависимости от положения луча по отношению к линии уровня расплавленного материала посредством плоской двухкоординатной матрицы фотоприемника, преобразования его в электрический сигнал, с последующим его усилением и формированием сигнала контроля и управления загрузкой шихты. Данный способ и устройство позволяют не только контролировать уровень расплавленного материала в печи, но и управлять загрузкой печи. Однако недостатком их является низкая точность измерения высоты уровня при возмущении поверхности в зоне измерения, отсутствие контроля за уровнем по интенсивности отраженного луча, отсутствие контроля положения лазерного луча при выходе его за пределы матрицы фотоприемника при повышении или понижении пороговых значений уровня, что в свою очередь приводит к снижению надежности работы системы "печь-загрузка - система контроля" и может привести к аварийной ситуации и нарушениям технологического процесса. В основу изобретения поставлена задача создать такой способ контроля уровня расплавленного материала в печи и управления загрузкой шихты в печь, в котором пространственно-временная модуляция лазерного луча и обработка сигнала от принятого двухкоординатной матрицей фотоприемника отраженного луча с уче том всех возмущающи х факторов, посредством измерения изменений интенсивности отраженного лазерного луча и его смещения и выработки на основе анализа этих факторов, сигнала управления, позволило бы повысить точность измерения и надежность работы. В основу создания устройства, реализующего данный способ, поставлена задача разработать такое устройство, в котором новое выполнение блоков обработки лазерного сигнала и управления загрузкой позволило бы обеспечить учет всех факторов, влияющих на процесс измерения и управления, что привело б к повышению точности контроля уровня и надежности работы системы в целом. Поставленная задача решается тем, что в способе контроля уровня расплавленного материала в печи и управления загрузкой шихты, включающем зондирование лазерным лучом контролируемойсреды, прием отраженного от среды сигнала и распределение его по двум каналам в зависимости от положения луча по отношению к заданной линии уровня материала посредством плоской двухкоординатной матрицы фотоприемника, преобразование его в электрический сигнал, усиление его и формирование сигнала контроля и управления, согласно изобретения, зондирующий сигнал подвергают пространственновременной модуляции, а отраженный оптический сигнал преобразованный в электрический, модулируют по амплитуде за счет перераспределения луча в секторах плоской двухкоординатной матрицы фотоприемника посредством изменения положения луча при смещении уровня поверхности среды, причем электрический сигнал перед усилением фильтруют и ограничивают по максимуму и минимуму, а после усиления, повторно фильтруют и усиливают, с последующей фильтрацией его по низкой частоте, повторно ограничивают по максимуму и минимуму, усиливают, детектируют, проводят его скользящее интегрирование, суммирование, вычитание, формируя сигналы пропорциональные соответственно величине смещения уровня расплавленного материала от заданного уровня и величины интенсивности луча и по пороговым значениям сигнала вырабатывают сигналы индикации уровня и интенсивности, а сигнал управления дополнительно обрабатывают посредством робастного фильтра и по пороговым значениям вырабатывают сигнал управления загрузкой. Кроме того, поставленная задача решается тем, что в устройство контроля уровня расплавленного материала в печи и управления загрузкой шихты в почт, содержащем источник лазерного излучения, плоскую двухкоординатную матрицу фотоприемника, каждый выход которой соединен соответственно с одним из двух входов блока обработки сигнала, выходы которого соединены со входами блока управления, выход которого соединен с исполнительным механизмом, согласно изобретения, в устройство дополнительно введен пространственно-временной модулятор лазерного луча, а блок обработки сигнала включает два канала, каждый из которых содержит последовательно соединенные первый полосовой фильтр, вход которого является входом обработки сигнала, первый ограничитель уровня, первый усилитель, второй полосовой фильтр, второй усилитель, фильтр низких частот, второй ограничитель уровня, третий усилитель, детектор огибающей, интегратор, сумматор, причем инверсный вход сумматора первого канала соединен с выходом интегратора второго канала, а выход сумматора второго канала соединен с выходом интегратора первого канала, а его выход соединен с индикатором интенсивности луча, выход сумматора первого канала соединен с индикатором уровня и входом робастного фильтра, выход которого соединен с входом блока формирования образа динамической ситуации, выход которого является выходом блока обработки сигнала и соединен с входами блока управления, который содержит последовательно соединенные стохастический процессор, блок формирования команд и блок оперативной памяти, причем входы стохастического процессора являются входами блока управления, а выход блока оперативной памяти является выходом блока управления. Согласно изобретению, робастный фильтр содержит последовательно соединенные первый ограничитель уровня, скользящий интегратор и второй ограничитель уровня, причем вход первого ограничителя уровня является входом робастного фильтра, а выход второго ограничителя уровня является выходом робастного фильтра. Кроме того, блок формирования образа динамической ситуации, согласно изобретению, содержит аналого-цифровой преобразователь рангов, вход которого является входом блока формирования образа динамической ситуации, а выходы соединены с входами интегратора-сумматора, первого и второго формирователей функционалов и формирователя плотности вероятностей, причем выходы первого и второго формирователя функционалов и формирователя плотности вероятностей соединены соответственно с входами индикатора образа динамической ситуации, а вторые их входы соединены с задатчиком пороговых значений, а выходы аналого-цифрового преобразователя рангов и интеграторасумматора являются выходами блока формирования образа динамической ситуации. В соответствии с изобретением, стохастический процессор содержит задающий генератор тактовых импульсов, выход которого соединен с входом первого делителя, первый выход которого соединен с первыми входами первой и второй схем "И", а второй выход - с входом второго делителя, выходы которого соединены с входами дешифратора, выход которого соединен с входом первого триггера и входами формирователя установочного импульса и формирователя установки нуля, вы ходы которых соединены соответственно с первым и вторым входами первого и второго счетчиков, выходы которых являются выходами стохастического процессора, двухполярный переключатель, первый выход которого соединен с первыми входами первой и второй схем "ИЛИ", a вторые входы схем "ИЛИ" являются входами стохастического процессора, а второй выход двухполярного переключателя и выходы схем "ИЛИ" являются выходами стохастического процессора, переключатель рангов, входы которого являются входами стохастического процессора, а выходы соединены с третьими входами первой и второй схем "И" соответственно, выходы которых соединены с третьими входами первого и второго счетчиков соответственно, причем вторые входы схем "И" соединены с выходом первого триггера, а выход кодового переключателя соединен с четвертыми входами первого и второго счетчиков. Кроме того, в соответствии с изобретением, формирователь функционалов содержит цифроаналоговый преобразователь, входы которого являются входами формирователя функционалов, а выходы соединены со входами суммирующего двойного интегратора, выход которого соединен с первым входом порогового устройства, второй вход которого является вторым входом формирователя функционалов, а выход порогового устройства является выходом формирователя функционалов. Введение в способ контроля уровня расплавленного материала в печи и управления загрузкой шихты в печь пространственно-временной модуляции зондирующего сигнала лазерного луча путем введения в устройство пространственно-временного модулятора позволило повысить помехоустойчивость при приеме отраженного лазерного луча, что придало ему отличительные свойства по сравнению с фоновым излучением печи и окружающей среды. Моделирование отраженного лазерного луча по амплитуде за счет перераспределения луча в секторах плоской двухкоординатной матрицы фотоприемника, посредством изменения положения луча при смещении уровня поверхности среды, позволило получить сигнал электрический, который пропорциональный величине смещения, что повысило точность контроля и надежность работы системы в целом. Обработка электрического сигнала полученного на выходе плоской двухкоординатной матрицы фотоприемника путем его фильтрации, усиления, ограничения по максимуму и минимуму, детектирования, скользящего интегрирования, суммирования и вычитания при помощи предложенного блока обработки сигнала, позволяет получить достоверную информацию об уровне расплавленного материала в печи исключив влияние на процесс всех отрицательных факторов. Обработка сигнала посредством робастного фильтра позволяет повысить помехоустойчивость системы контроля к грубым импульсным помехам (возмущениям и т.д.). повышая тем самым точность контроля уровня. Выработка сигнала управления загрузкой по пороговым значениям учитывая статистические характеристики режимов загрузки и выгрузки, а также зависимость между загрузкой шихты и расходом расплавленного материала, позволяет повысить надежность работы системы в целом. По сравнению с прототипом, предложенный способ контроля уровня расплавленного материала в печи и управления загрузкой шихты в печь и устройство для его реализации имеет точность контроля в 10 раз выше, а также высокую надежность в работе за счет исключения нарушения технологического процесса. На фиг.1 изображена блок-схема предложенного устройства контроля уровня расплавленного материала в печи и управления загрузкой шихты в печь; на фиг.2 - блок-схема блока обработки сигнала; на фиг.3 - блок-схема блока управления; на фиг.4 - блок-схема робастного фильтра; на фиг.5 - блок-схема блока формирования образа динамической ситуации; на фиг.6 - блок-схема стохастического процессора; на фиг.7 - блок-схема формирователя функционалов; на фиг.8 - плоская двухкоординатная матрица фотоприемника и ее выходные характеристики; на фиг.9 - 12 изображены диаграммы работы блока обработки сигнала; на фиг.13 - алгоритм работы блока управления. Устройство контроля уровня расплавленного материала в печи и управления загрузкой шихты в печь (фиг.1), содержит источник лазерного излучения 1, плоскую двухкоординатную матрицу фотоприемника 2, каждый выход которой соединен соответственно с одним из двух входов блока обработки сигнала 3, выходы которого соединены со входами блока управления 4, выход которого соединен с исполнительным механизмом 5, соединенного с бункером б загрузки шихты, пространственно-временной модулятор 7 лазерного луча. Источник лазерного излучения 1, установлен относительно печи 8 так, что его луч попадает на поверхность расплавленного материала через смотровое окно 9 под определенным углом, а отраженный луч через выходное окно 10 попадает на плоскую двухкоординатную матрицу фотоприемника 2. Пространственно-временной модулятор 7 выполнен в виде диска 11 с прорезями, который установлен на валу двигателя 12, причем диск 11 с прорезями расположен на пути прохождения лазерного луча. Блок обработки сигнала (фиг.2) включает два канала, каждый из которых содержит последовательно соединенные первый полосовой фильтр 13 и 14, первый ограничитель уровня 15 и 16, первый усилитель 17 и 18, второй полосовой фильтр 19 и 20, второй усилитель 21 и 22, фильтр низких частот 23 и 24, второй ограничитель уровня 25 и 26, третий усилитель 27 и 28, детектор огибающей 29 и 30, скользящий интегратор 31 и 32, сумматор 33 и 34, причем инверсный вход сумматора 33 соединен с выходом скользящего интегратора 32, а вход сумматора 34 соединен с выходом скользящего интегратора 31, выход которого соединен с индикатором интенсивности луча 35, а выход сумматора 33 соединен с индикатором уровня 36 и входом робастного фильтра 37, выход которого соединен со входом блока формирования образа динамической ситуации 38, выходы которого являются выходами 39 блока обработки сигнала 3 и соединены со входами блока управления 4, а входы полосовых фильтров 13 и 14 являются входами 40, 41 блока обработки сигнала 3 и соединены с выходами плоской двухкоординатной матрицы фотоприемника 2. Блок управления (фиг.3) содержит последовательно соединенные стохастический процессор 42, блок формирования команд 43 и блок оперативной памяти 44, причем входы стохастического процессора 42 являются входами 45 блока управления 4 и соединены с выходами 39 блока обработки сигнала 3, а выход блока оперативной памяти 44 является выходом 46 блока управления 4 и соединен с входом исполнительного механизма 5. Робастный фильтр 37 (фиг.4) содержит последовательно соединенные первый ограничитель уровня 47, скользящий интегратор 48 и второй ограничитель уровня 49, причем вход первого ограничителя уровня 47 является входом робастного фильтра 37, который соединен с выходом сумматора 33, а выход второго ограничителя уровня 49 является выходом робастного фильтра 37, который соединен с входом блока формирования образа динамической ситуации 38. Блок формирования образа динамической ситуации 38 (фиг.5) содержит аналого-цифровой преобразователь рангов 50, вход которого является входом блока формирования образа динамической ситуации 38 и соединен с выходом робастного фильтра 37, а выходы соединены с входами интеграторасумматора 51, формирователей функционалов 52, 53 и формирователя плотностей вероятностей 54, выходы которых соединены с входами индикатора 55 образа динамической ситуации, а вторые входы формирователей функционалов 52, 53 и формирователя плотностей вероятностей 54 соединены с задатчиком пороговых значений 56, причем выходы интегратора-сумматора 51 и выходы аналогоцифрового преобразователя рангов 50 являются выходами 39 блока формирования образа динамической ситуации 38 и соединены соответственно со входами блока управления 4. Стохастический процессор 42 (фиг.6) содержит задающий генератор тактовых импульсов 57, выход которого соединен с входом первого делителя 58, первый выход которого соединен с первыми входами первой 59 и второй 60 схем "И", а второй выход - с входом второго делителя 61, выходы которого соединены с входами дешифратора 62, выход которого соединен с входом первого триггера 63 и входами формирователей установочного импульса и установки нуля 64 и 65 соответственно, вы ходы которых соединены соответственно с первым и вторым входами первого 66 и второго 67 счетчиков, выходы которых являются выходами стохастического процессора 42 и соединены со входами блока формирования команд 43, двухполярный переключатель 68 является задатчиком логических уровней "0" и "1", первый выход которого соединен с первыми входами первой 69 и второй 70 схем "ИЛИ", а вторые входы схем "ИЛИ" 69 и 70 являются входами стохастического процессора 42 и соединены с выходами блока формирования образа динамической ситуации 38, а выходы схем "ИЛИ" 69, 70 являются выходами стохастического процессора 42 и соединены с блоком формирования команд 43, а второй выход переключателя 68 является выходом стохастического процессора 42 и соединены с выходом блока формирования образа динамической ситуации 38, а выходы его соединены с третьими входами первой 59 и второй 60 схем "И" соответственно, выходы которых соединены с третьими входами первого 66 и второго 67 счетчиков соответственно, причем вторые входы схем "И" 59, 60 соединены с выходом первого триггера 63, а выход котдового переключателя 72 соединены с четвертыми входами счетчиков 66, 67. Каждый из формирователей функционалов 52, 53 и формирователя плотности вероятностей 54 (фиг.7) выполнены по аналогичным схемам и содержат цифро-аналоговый преобразователь 73, выходы которого являются входами формирователя функционалов 52, 53 или формирователя плотности вероятностей 54 и соединены соответственно с аналого-цифровым преобразователем рангов 50 блока формирования образа динамической ситуации 38, а выходы соединены со входами суммирующего двойного интегратора 74, выход которого соединен с первым входом порогового устройства 75, второй вход которого является вторым входом формирователя фунционалов 52, 53, формирователя плотности вероятностей 54 и соединены с задатчиком пороговых значений 56, а выход порогового устройства 75 является выходом формирователя функционалов 52, 53, формирователя плотностей вероятностей 54 и соединены с входами индикатора 55 образа динамической ситуации блока формирования образа динамической ситуации 38. Блок формирования команд 43 выполнен на двух схемах "И", блок оперативной памяти 44 выполнен на RS-триггере. Способ контроля уровня расплавленного материала и управления загрузкой шихты в печь осуществляется следующим образом. Лазерный луч (фиг.9а) формированный источником лазерного излучения 1 (фиг.1) подвергают пространственно-временной модуляции (фиг.9б) при помощи вращающегося диска 11 и с прорезями и направляют его под углом через окно 9 печи 8 на поверхность расплавленного материала. Отраженный луч (фиг.9в) через окно 10 попадает на плоскую двухкоординатную матрицу фотоприемника 2, в котором оптический луч несущий информацию о координатах поверхности среды преобразовывается в электрический сигнал пропорциональный интенсивности и смещению лазерного луча. Плоская двухкоординатная матрица фотоприемника 2 (фиг.8) является пространственным дискриминатором, который определяет положение центра плотности мощности лазерного луча, отраженного от поверхности расплавленного материала, несущего информацию о его положении. Изменение уровня расплавленного материала приводит к смещению отраженного луча относительно координат плоской двухкоординатной матрицы фотоприемника 2 на выходе которого формируется электрический сигнал в каждом канале в зависимости от яркости и площади сектора отраженного луча, падающего на плоскую двухкоординатную матрицу фотоприемника 2 (фиг.9в, г). Амплитудно-модулированный импульсный электрический сигнал поступает на входы двухканального блока обработки сигнала 3 (фиг.2), в котором осуществляется его обработка по алгоритму имеющего вид: где B = (H1 ,H2,La,h0) геометрический базис системы; Kl-h; Kl-u - коэффициенты преобразования; Dl - изменение интенсивности луча в секторе двухкоординатной матрицы фотоприемника 2, за счет смещения Dh, что приводит к перераспределению сечения луча Sl на секциях плоской двухкоординатной матрицы фотоприемника 2; Ui - напяжение на выходе блока обработки сигнала 3, которое характеризует модуль огибающей электрического сигнала с амплитудой A и частотой f m; L - длина канала луча. Электрический сигнал поступает на вход полосовых фильтров 13 и 14 (фиг.2), которые выделяют сигнал с частотой из общего зашумленного сигнала, избавляясь тем самым фоновых помех, амплитуда которого характеризует смещение уровня расплавленного материала. Выделенные полосовыми фильтрами 13 и 14 сигналы (фиг.9е, ж) поступает на ограничители уровня 15 и 16, где сигнал ограничивается на определенном уровне сверху и снизу избавляясь от импульсных помех. После чего сигнал усиливают посредством усилителей 17 и 18 с последующей фильтрацией сигнала вторыми полосовыми фильтрами 19, 20 с целью повышения селективности полезного сигнала его усиливают вторыми усилителями 21, 22 (фиг.9з, и), после чего сигнал поступает на фильтры нижних частот 23, 24, которые сглаживают флуктуации сигнала, возникающие за счет возмущения отражающей поверхности расплавленного материала потоком горячих газов, дальше сигнал ограничивают посредством ограничителей уровня 25, 26, усиливают посредством усилителей 27, 28 и посредством детекторов огибающей 29, 30 выделяют из него низкочастотный сигнал (фиг.10а, б), который несет информацию о смещении уровня расплавленного материала и величине интенсивности и ограничивают его по нижнему уровню. Выделенные сигналы поступают на скользящие интеграторы 31,32 (фиг.10в, г), которые вырабатывают сигналы усреднения за определенный период времени. Дальше проводят сложение и вычитание сигналов, поступающи х по каждому из каналов, посредством сумматоров 33, 34, при этом сумматор 33 формирует сигнал несущей информацию о смещении уровня путем вычитания сигналов из двух каналов, индицируя его на индикаторе уровня 36, а сумматор 34 формирует сигнал несущей информацию об интенсивности отраженного лазерного луча п утем сложения сигналов из двух каналов, индицируя его на индикаторе интенсивности 35. Кроме того, сигнал на сумматоре 33 (фиг.11а) поступает на робастный фильтр 37 (фиг.4) с нелинейной амплитудно-частотной характеристикой, где происходит подавление грубых импульсных помех и формируется сигнал о смещении траектории уровня (фиг.11,б). Этот сигнал поступает на блок формирования образа динамической ситуации 38 (фиг.5), в котором осуществляется дискриминация сигнала по амплитуде и интегрирование по времени сформированных ранговых импульсных сигналов (фиг.12а, б). Из блока формирования образа динамической ситуации 38 сигнал поступает на стохастический процессор 42 (фиг.6) блока управления 4, который производит вычисление времени пребывания траектории уровня за пороговым значением и с учетом вычисленных значений функционалов определяет истинность ситуации: достижение уровнем поверхности расплавленного материала порогового значения, случайный выброс траектории за счет возмущающи х факторов, т.е. сто хастический процессор 42 в соответствии с алгоритмом (фиг.13) проводит проверку поведения траектории уровня расплавленного материала в отношении относительного превышения уровня, времени пребывания за пороговыми значениями и интенсивности выбросов. Проверка осуществляется, как по положительному, так и по отрицательному превышению пороговых значений смещения уровня расплавленного материала и формирует команды "отключить загрузчик" и "включить загрузчик" соответственно. Команды в виде логических "0" и "1" формируются в блоке формирователя команд 43 и поступают на блок оперативной памяти 44 (фиг.3), из которого сигнал команд поступает на исполнительный механизм 5 (фиг.1), который в зависимости от полученных команд производит соответствующие действия. Алгоритм контроля уровня расплавленного материала и управления загрузкой шихты в печь приведен на фиг.13. При выполнении управляющей программы происходит анализ динамической ситуации в зависимости от условий протекания процесса и возмущающи х факторов, определяется тенденция изменения сигнала во времени. Так как смещение уровня имеет отрицательные и положительные значения, то алгоритм разбит на две аналогичные подгруппы (проверка условий отрицательной и положительной полуволны). В зависимости от уровня сигнала поступающего с блока обработки сигнала 2 (фиг.2) с помощью аналого-цифрового преобразователя рангов 50 (фиг.5) происходит разбивка амплитуды сигнала по величине на ряд дискретных значений, при этом импульсные потоки схемы сравнения несут информацию о времени пребывания за пороговым значением. В зависимости от признака выполнения условия сравнения осуществляется вычисление времени пребывания за порогом относительно эталонных ворот и вычисление компонента вероятностных функционалов. При условии, что вычисленный интервал t > t0 дается разрешение на последующее выполнение алгоритма по оценке вероятностных функционалов, которые при условии t+ > t0 и F ³ a F+ указывают, что траектория уровня с заданной вероятностью достигла максимального значения, что значит, что суммарное вероятностное достижение уровня стремится к единице, при этом отсекается альтернатива об выбросе траектории за счет помех. Логическое объединение этих условий по времени и функционалу является основой для формирования команды выключения загрузки. Для отрицательной полуволны смещения алгоритм повторяется и формируется команда на выполнение загрузки. Источники информации 1. Патент ГДР №261426, кл. G01F23/00, C03D5/24, 1988. 2. Авторское свидетельство ЧССР №260276, кл. G01F13/28, 1989.
ДивитисяДодаткова інформація
Автори англійськоюSikora Liubomyr Stepanovych
Автори російськоюСикора Любомир Степанович
МПК / Мітки
МПК: C03B 5/00, G01F 23/284
Мітки: рівня, завантаженням, контролю, піч, шихти, розплавленого, печі, реалізації, пристрій, спосіб, матеріалу, управління
Код посилання
<a href="https://ua.patents.su/14-14877-sposib-kontrolyu-rivnya-rozplavlenogo-materialu-v-pechi-i-upravlinnya-zavantazhennyam-shikhti-v-pich-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю рівня розплавленого матеріалу в печі і управління завантаженням шихти в піч та пристрій для його реалізації</a>
Пристрій автоматичного управління виїмковою машиною
Номер патенту: 7597
Опубліковано: 29.09.1995
Автори: Кіріченко Костянтин Іванович, Бакуменко Володимир Степанович, Сірченко Володимир Миколайович, Захаров Володимир Миколаєвич, Клименко Володимир Іванович
МПК: E21C 35/24
Мітки: управління, автоматичного, пристрій, машиною, виїмковою
Формула / Реферат:
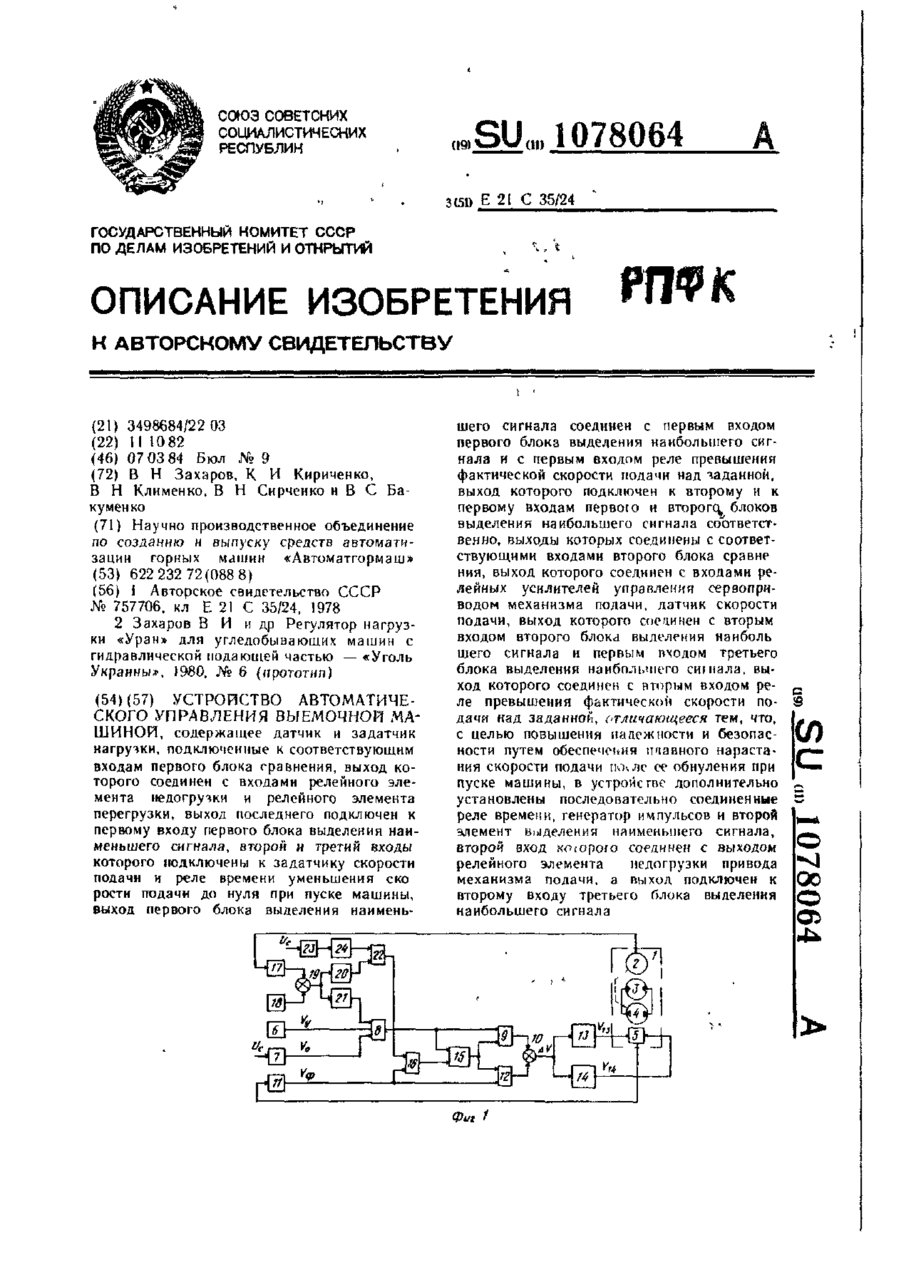
Устройство автоматического управления выемочной машиной, содержащее датчик и задатчик нагрузки, подключенные к соответствующим входам первого блока сравнения, выход которого соединен с входами релейного элемента недогрузки и релейного элемента перегрузки, выход последнего подключен к первому входу первого блока выделения наименьшего сигнала, второй и третий входы которого подключены к задатчику скорости подачи и реле времени уменьшения...
Спосіб контролю імпульсів зі сплощенною вершиною та пристрій для його реалізації
Номер патенту: 6349
Опубліковано: 29.12.1994
Автори: Ванько Володимир Михайлович, Дороніна Ольга Михайлівна, Лавров Геннадій Миколайович
МПК: G01R 19/04
Мітки: імпульсів, сплощенною, вершиною, реалізації, пристрій, спосіб, контролю
Формула / Реферат:
1. Способ контроля импульсов с уплощенной вершиной, заключающийся в инвертировании входного сигнала, задержке во времени и суммировании с исходным, сравнении результирующего сигнала с первым опорным уровнем и измерении в моменты перехода этого сигнала с уровня, превышающего по модулю первый опорный, на уровень, меньший по модулю опорного уровня, отличающийся тем, что, с целью расширения функциональных возможностей за счет обеспечения...
Пристрій для контролю витрат гарячого дуття через фурми доменної печі
Номер патенту: 174
Опубліковано: 30.04.1993
Автори: Бабак Олег Володимирович, Степанов Василь Васильович, Терещенко Володимир Петрович, Чернов Віктор Олександрович
МПК: C21B 7/24
Мітки: пристрій, доменної, контролю, дуття, витрат, печі, фурми, гарячого
Формула / Реферат:
Формула изобретенияУстройство для контроля расхода горячего дутья через фурмы доменной печи, содержащее измеритель суммарного расхода горячего дутья, измерители перепада давления на фурменных приборах, соединенные с вычислительными блоками, вторичные регистрирующие приборы, отличающееся тем, что, с целью повышения быстродействия и надежности контроля, оно снабжено сумматором, первым блоком умножения, задатчиком отношения фактического...
Пристрій для контролю набору та сходу шихти з бункерів
Номер патенту: 12035
Опубліковано: 25.12.1996
Автори: Зубець Олександр Тихонович, Калініна Тетяна Борисівна, Шевченко Генадій Степанович
МПК: G05D 27/00, C10B 31/00
Мітки: сходу, шихти, контролю, набору, пристрій, бункерів
Формула / Реферат:
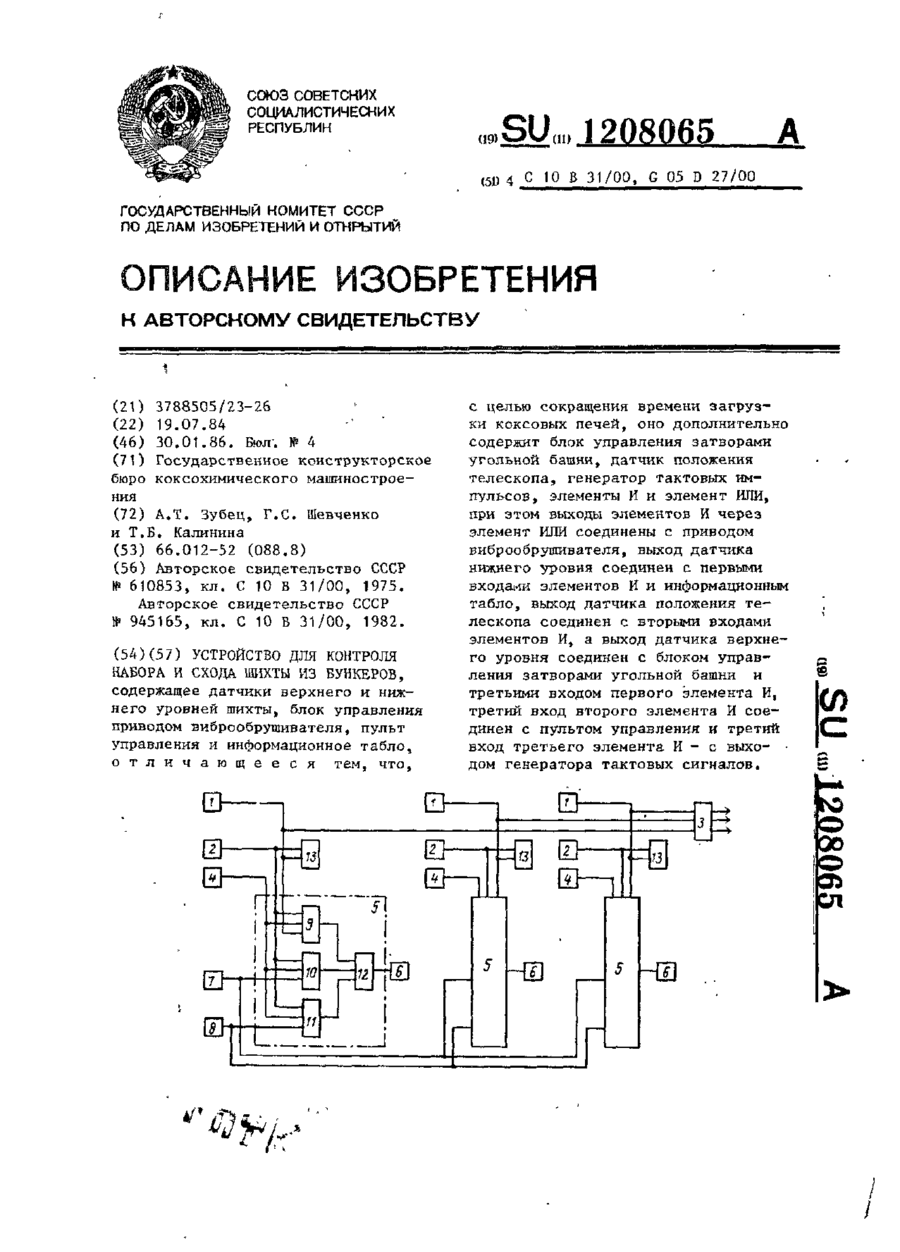
Устройство для контроля набора исхода шихты из бункеров, содержащее датчики верхнего и нижнего уровней шихты, блок управления приводом виброобрушивателя, пульт управления и информационное табло, отличающееся тем, что, с целью сокращения времени загрузки коксовых печей, оно дополнительно содержит блок управления затворами угольной башни, датчик положения телескопа, генератор тактовых импульсов, элементы И и элемент ИЛИ, при этом выходы...
Спосіб оперативного контролю та управління технологічними параметрами при переробці мінеральної сировини на конвеєрі та пристрій для його реалізації
Номер патенту: 20840
Опубліковано: 07.10.1997
Автори: Азарян Альберт Арамаісович, Серебреніков Вадим Михайлович, Азарян Володимир Альбертович, Красуля Олександр Сергійович
МПК: G01N 23/20
Мітки: переробці, спосіб, мінеральної, пристрій, сировини, технологічними, контролю, оперативного, управління, реалізації, параметрами, конвеєрі
Формула / Реферат:
1. Способ оперативного контроля и управления технологическими параметрами при переработке минерального сырья на конвейере заключается в том, что контролируемую горную массу облучают источником ионизирующего излучения, регистрируют интегральный поток обратно-рассеянного излучения, по которому определяют содержание полезного компонента, отличающийся тем, что непрерывно контролируют содержание полезного компонента в горной массе, активную...
Попередній патент: Спосіб ідентифікації особи за параметрами усного мовлення
Наступний патент: Електрохімічний спосіб акумулювання і/або генерування енергії (варіанти) та пристрій для його здійснення (варіанти)
Випадковий патент: Механічний безмуфтовий прес (варіанти)