Виконавчий механізм систем автоматики із зворотно-обертальним ротором
Номер патенту: 103826
Опубліковано: 25.12.2015
Формула / Реферат
Виконавчий механізм систем автоматики із зворотно-обертальним ротором, що містить корпус, кронштейн, зв'язаний з корпусом, зворотно-обертальний ротор з валом і лопаттю, установлені в корпусі, взаємодіючі вал з кронштейном, а лопать з корпусом, з утворенням першої і другої ізольованих порожнин, сполучених пневматичними магістралями з пристроєм керування, який відрізняється тим, що в кожній порожнині додатково установлені перший і другий диференціюючі блоки, виконані у вигляді з'єднаних між собою жорсткими тягами двох діафрагм, одні з яких герметично з'єднані з корпусом, а другі діафрагми - з циліндричними напрямними, зв'язаними з кронштейном, з утворенням першої і другої камер, причому з пневматичними магістралями перша і друга ізольовані порожнини сполучені безпосередньо, а перша і друга камери диференціюючих блоків - через додатково установлені в кронштейні дроселі.
Текст
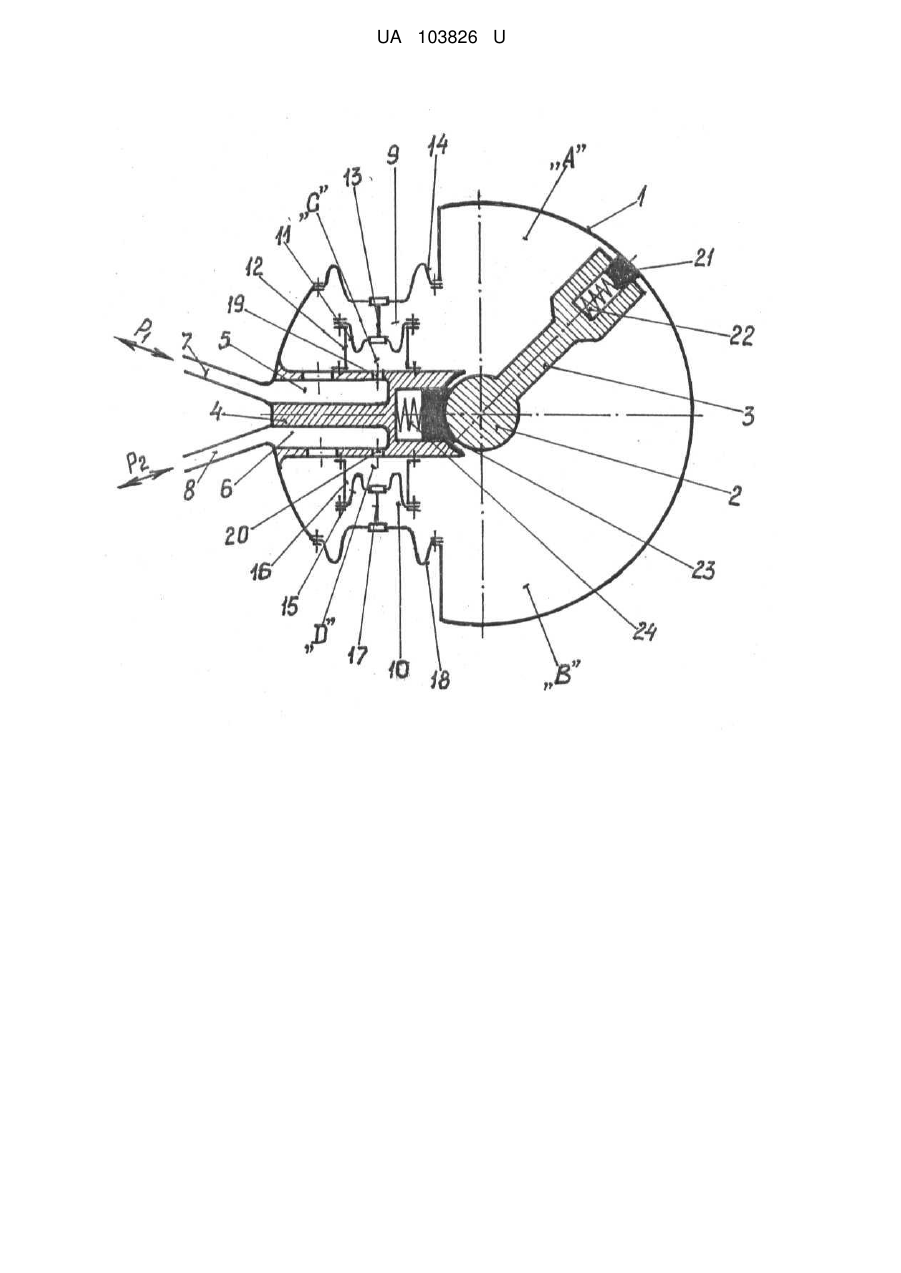
Реферат: Виконавчий механізм систем автоматики із зворотно-обертальним ротором містить корпус, кронштейн, зв'язаний з корпусом, зворотно-обертальний ротор з валом і лопаттю, установлені в корпусі, взаємодіючі вал з кронштейном, а лопать з корпусом, з утворенням першої і другої ізольованих порожнин, сполучених пневматичними магістралями з пристроєм керування. В кожній порожнині додатково установлені перший і другий диференціюючі блоки, виконані у вигляді з'єднаних між собою жорсткими тягами двох діафрагм, одні з яких герметично з'єднані з корпусом, а другі діафрагми - з циліндричними напрямними, зв'язаними з кронштейном, з утворенням першої і другої камер. При цьому з пневматичними магістралями перша і друга ізольовані порожнини сполучені безпосередньо, а перша і друга камери диференціюючих блоків - через додатково установлені в кронштейні дроселі. UA 103826 U (54) ВИКОНАВЧИЙ МЕХАНІЗМ СИСТЕМ АВТОМАТИКИ ІЗ ЗВОРОТНО-ОБЕРТАЛЬНИМ РОТОРОМ UA 103826 U UA 103826 U 5 10 15 20 25 30 35 40 45 50 55 Виконавчий механізм належить до засобів систем пневмоавтоматики регулювання і керування і може бути використаний в системах автоматичного регулювання (CAP) і керування (САК) теплоенергетичних установок та інших об'єктів промислової пневмоавтоматики для покращення динамічних показників їх перехідних процесів. Відомий виконавчий механізм систем автоматики із зворотно-обертальним ротором містить корпус, кронштейн зв'язаний з корпусом, зворотно-обертальний ротор з валом і лопаттю, взаємодіючими з кронштейном і корпусом з утворенням двох ізольованих порожнин, сполучених пневматичними магістралями з пристроєм керування (див. кн. Крутов В.И., Данилов Ф.М., Кузьмик П.К. и др. Основы теории автоматического регулирования; Под ред. В.И. Крутова. 2-е изд., перераб. и доп. - М: Машиностроение, 1984. - с. 116, рис. 77,а). Однак, недоліком відомого виконавчого механізму є низька швидкодія повертання ротора, викликана запізнювальними сигналами керування, пропорційними тільки змінюванню тиску в підвідних до механізму магістралях. Це понижує точність функціонування пневматичних CAP і САК, ефективність використання оснащених ними об'єктів різних галузей народного господарства, а також обмежує область його застосування. Отже, відомий виконавчий механізм має низьку точність функціонування пневматичних CAP і САК і ефективність використання оснащених ними об'єктів різних галузей народного господарства, а також обмежену область застосування. В основу корисної моделі поставлено задачу підвищити точність функціонування пневматичних CAP і САК з виконавчим механізмом із зворотно-обертальним ротором і ефективність використання оснащених ними об'єктів, а також розширити область застосування виконавчого механізму. Для вирішення даної задачі пропонується удосконалення відомого виконавчого механізму, суттєві ознаки якого полягають в тому, що в закон керування повертанням його ротора вводиться корегуючий сигнал, пропорційний як змінюванню тиску в підвідних до нього магістралях, так і додатковий, пропорційний швидкості (першій похідній) його змінювання. Це реалізується шляхом установлення в кожній ізольованій порожнині додаткових першого і другого пневматичних диференціюючих блоків, виконаних у вигляді з'єднаних між собою жорсткими тягами двох діафрагм, одні з яких герметично з'єднані з корпусом, а другі діафрагми - з циліндричними напрямними, зв'язаними з кронштейном з утворенням двох камер. Причому з пневматичними магістралями, що йдуть від пристрою керування, перша і друга ізольовані порожнини сполучені безпосередньо, а камери диференціюючих блоків - через додатково установлені в кронштейні дроселі. При такому технічному рішенні, завдяки формуванню додатково корегуючого сигналу, пропорціонального швидкості змінювання тиску, лопать разом з валом, з'єднаним з регулюючим органом, повертається з підвищеною швидкістю, покращуючи динамічні показники перехідних процесів CAP і САК з підвищеною ефективністю використання оснащених ними об'єктів. На представленому кресленні схематично показано загальний вигляд виконавчого механізму із зворотно-обертальним ротором. Виконавчий механізм містить корпус 1, в якому установлений ротор з валом 2 і приєднаною до нього лопаттю 3, що розділяє порожнину корпуса на першу "А" і другу "В" ізольовані порожнини. До корпуса 1 жорстко приєднаний одним торцем кронштейн 4, в якому розміщені канали 5, 6, сполучені пневматичними магістралями 7, 8, що йдуть від пристрою керування. В порожнині "А" установлений перший 9, а в порожнині "В" другий 10 пневматичні диференціюючі блоки. Блок 9 містить діафрагму 11, закріплену на напрямній 12, зв'язаній з кронштейном 1, з утворенням першої камери "С", і через тягу 13 жорстко зв'язану з діафрагмою 14, з'єднаною з корпусом 1. Блок 10 містить діафрагму 15, закріплену на напрямній 16, зв'язаній з кронштейном 1, з утворенням другої камери "D", і через тягу 17 жорстко зв'язану з діафрагмою 18, з'єднаною з корпусом 1. З каналами 5, 6 перша "А" і друга "В" порожнини сполучені безпосередньо, а камери "С" і "D" диференціюючих блоків 9, 10 - через додатково установлені в кронштейні 4 дроселі 19, 20. Герметичність в з'єднанні лопать 3 - корпус 1 забезпечується ущільненням 21 і пружиною 22, а в з'єднанні вал 2 - кронштейн 4 - ущільненням 23 і пружиною 24. В системах автоматичного керування виконавчий механізм працює наступним чином. При різкому зростанні тиску р1 в підвідній магістралі 7 і каналі 5 повітря з нього безпосередньо надходить в ізолюючу порожнину першу "А" і через дросель 19 - в першу камеру "С", підвищуючи в них тиск. Однак, через наявність дроселя 19 тиск в камері "С" зростатиме менш інтенсивно, ніж в порожнині "А". В результаті діафрагма 11 переміститься донизу, і через 1 UA 103826 U 5 10 15 20 25 30 35 40 тягу 13 за собою перемістить діафрагму 14, зменшуючи об'єм порожнини "А", пропорційно підвищуючи в ній тиск, який буде складатися із двох тисків: - першого, пропорційного змінюванню вхідного тиску ρλ в підвідній магістралі 7; - другого, пропорціонального швидкості (першій похідній) його змінювання. Під дією результуючого тиску лопать 3 повернеться із збільшеною швидкістю, створюючи в порожнині "В" надлишковий тиск повітря, яке безпосередньо надійде через канал 6 і магістраль 8 на вихід і частково через дросель 20 в камеру "D". Але завдяки дроселю тиск в ній не буде інтенсивно змінюватися і при досягненні певного значення тиску в порожнині "В" діафрагма 15 опуститься донизу і через тягу 17 перемістить діафрагму 18, додатково збільшуючи її об'єм і відповідно зменшуючи в ній тиск. Останнє в перехідному процесі сприятиме повертанню лопаті 3 разом з валом 2 ротора, з'єднаним з регулюючим органом, з більшою швидкістю до положення, яке відповідатиме рівновазі сил, діючих на лопать. У випадку різкого зростання тиску р2 в підвідній магістралі 8 і каналі 6 виконавчий механізм працюватиме аналогічно, тільки з тією різницею, що в дію вступить диференціюючий блок 10 і всі рухомі деталі механізму будуть переміщатися у зворотному напрямку, також забезпечуючи лопаті 3, валу 2 ротора і регулюючому органу підвищену швидкодію. Таким чином, в обох випадках перехідних процесів на ротор будуть діяти корегуючи сигнали, пропорційні змінюванню тиску в підвідних до нього магістралях і швидкості його змінювання. Використання запропонованого виконавчого механізму, у порівнянні з відомим, дасть можливість: - підвищити точність функціонування пневматичних CAP і САК з виконавчим механізмом із зворотно-обертальним ротором; - підвищити ефективність використання оснащених цими системами об'єктів і технологічних процесів завдяки точному підтримуванню заданих в них технологічних параметрів; - розширити область застосування на об'єктах і технологічних процесах, особливо з підвищеними вимогами, до стабілізації підтримання регульованих параметрів в умовах перемінних режимів їх роботи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Виконавчий механізм систем автоматики із зворотно-обертальним ротором, що містить корпус, кронштейн, зв'язаний з корпусом, зворотно-обертальний ротор з валом і лопаттю, установлені в корпусі, взаємодіючі вал з кронштейном, а лопать з корпусом, з утворенням першої і другої ізольованих порожнин, сполучених пневматичними магістралями з пристроєм керування, який відрізняється тим, що в кожній порожнині додатково установлені перший і другий диференціюючі блоки, виконані у вигляді з'єднаних між собою жорсткими тягами двох діафрагм, одні з яких герметично з'єднані з корпусом, а другі діафрагми - з циліндричними напрямними, зв'язаними з кронштейном, з утворенням першої і другої камер, причому з пневматичними магістралями перша і друга ізольовані порожнини сполучені безпосередньо, а перша і друга камери диференціюючих блоків - через додатково установлені в кронштейні дроселі. 2 UA 103826 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 11/50
Мітки: виконавчий, зворотно-обертальним, механізм, автоматики, ротором, систем
Код посилання
<a href="https://ua.patents.su/5-103826-vikonavchijj-mekhanizm-sistem-avtomatiki-iz-zvorotno-obertalnim-rotorom.html" target="_blank" rel="follow" title="База патентів України">Виконавчий механізм систем автоматики із зворотно-обертальним ротором</a>
Виконавчий механізм для інгалятора та інгалятор, що містить виконавчий механізм
Номер патенту: 66820
Опубліковано: 15.06.2004
Автори: Ходсон Деррен, Расмуссен Ерген
МПК: A61M 11/00, A61M 15/00
Мітки: інгалятора, інгалятор, виконавчий, механізм, містить
Формула / Реферат:
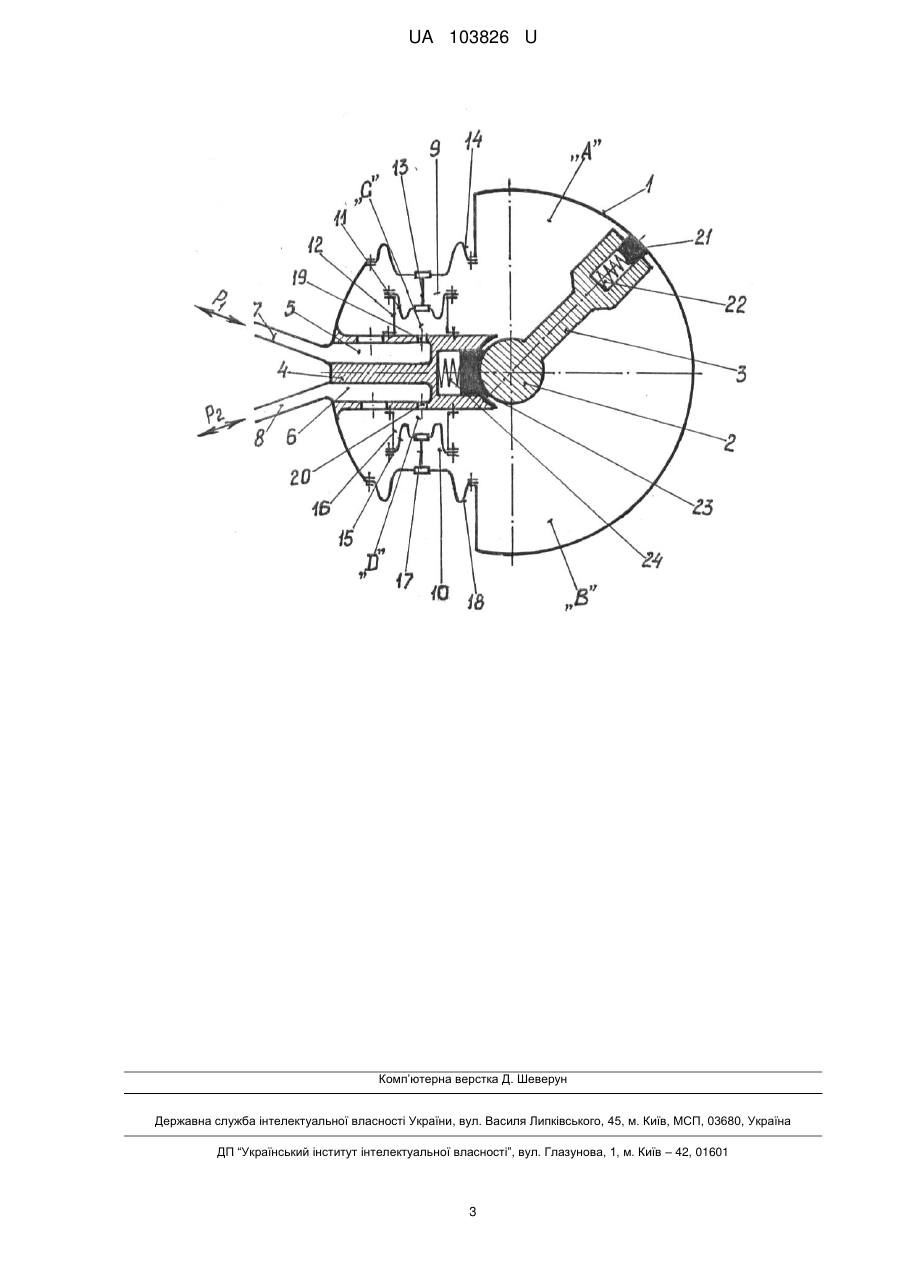
1. Виконавчий механізм для інгалятора, призначеного для введення лікарського засобу шляхом інгаляції, що містить основне тіло (2), що включає в себе трубчастий елемент (8) для прийому респіраторного флакона (7), що містить лікарський засіб, і шток (11) клапана, що виходить з нього, випускний вузол (4) у вигляді частини, утвореної окремо від основного тіла (2), що містить мундштук для направлення лікарського засобу в рот користувача і блок...
Виконавчий механізм рульового керування транспортного засобу

Номер патенту: 63416
Опубліковано: 15.01.2004
Автори: Антонова Галина Володимирівна, Жуковський Віктор Анатолійович, Петров Віктор Олексійович, Бондар Андрій Миколайович, Крилов Володимир Вікторович, Просвірнін Віктор Іванович, Лубяний Микола Миколайович
МПК: B62D 5/10
Мітки: керування, транспортного, виконавчий, механізм, засобу, рульового
Формула / Реферат:
1. Виконавчий механізм рульового керування транспортного засобу, який має гідроциліндр двосторонньої дії, поршень з ущільнювальними кільцями та штоком, кришки, патрубки для підводу робочої рідини, який відрізняється тим, що поршень має кільцеподібні магніти, які установлені на бічних його поверхнях.2. Виконавчий механізм за п. 1, який відрізняється тим, що магніти закріплені на бічних поверхнях через немагнітні шайби.3....
Інтерфейсний виконавчий механізм клапана
Номер патенту: 71896
Опубліковано: 17.01.2005
Автори: Николайчук Ярослав Миколайович, Перцович Іван Васильович
МПК: F16K 31/04
Мітки: виконавчий, інтерфейсний, клапана, механізм
Формула / Реферат:
Інтерфейсний виконавчий механізм клапана трубопроводу, який складений з арматури клапана, крокового двигуна приводу цієї арматури та блока керування клапаном, який відрізняється тим, що блок керування розташовано безпосередньо на приводі арматури, а привід обладнано окремо встановленими на ньому додатковими кроковими двигунами з можливістю їхньої сумісної роботи в процесі керування в синхронному режимі.
Гідравлічний мембранний виконавчий механізм двосторонньої дії
Номер патенту: 91889
Опубліковано: 25.07.2014
Автори: Грабовський Георгій Геннадійович, Цибрій Юрій Олександрович
МПК: F16H 43/00
Мітки: виконавчий, двосторонньої, механізм, гідравлічний, дії, мембранний
Формула / Реферат:
Виконавчий механізм гідравлічного натискного пристрою, що містить циліндр і плунжер з ущільненнями, розміщений в циліндрі, при цьому порожнина, що утворена циліндром і плунжером, підключена через датчик тиску і сервоклапан до системи гідроживлення, при цьому на зовнішній донній частині циліндра співвісно до нього виконано циліндричне заглиблення, накрите круглою гофрованою мембраною з жорстким центром, причому мембрана по зовнішньому контуру...
Виконавчий пристрій автоматики пальника
Номер патенту: 44394
Опубліковано: 15.02.2002
Автор: Мельніков Михайло Анатолійович
МПК: F23N 5/00, F23D 14/46
Мітки: пристрій, виконавчий, пальника, автоматики
Формула / Реферат:
Виконавчий пристрій автоматики пальника, що має клапани основного пальника, клапан запальника та клапан безпеки, оснащені механізмом їхнього відкривання та закривання а також заслінку повітряну з приводом її синхронного переміщення, який відрізняється тим, що привід синхронного переміщення заслінки повітряної зв'язаний з механізмом відкривання кожного з клапанів з можливістю їх взаємопов'язаного переміщення, а з клапанами основного пальника...
Попередній патент: Насадка для введення лікарського препарату у зону мигдалин
Наступний патент: Доменна піч
Випадковий патент: Система пожежо-вибухозахисту фільтрів