Пристрій для попередження зіткнень рухомих об’єктів в динамічному конфлікті в масштабі реального часу
Номер патенту: 106766
Опубліковано: 10.05.2016
Автори: Волков Олександр Євгенович, Павлов Вадим Володимирович
Формула / Реферат
Пристрій для попередження зіткнень рухомих об'єктів в динамічному конфлікті в масштабі реального часу, що містить блок прийому даних, блок обробки даних, модуль визначення загрози зіткнення, модуль розрахунків та блок видачі керуючих команд, сигналізації та індикації, які з'єднані у корпусі послідовно, який відрізняється тим, що в нього введені блок врахування "зон невизначеності", блок розрахунку та порівняння "областей керованості", блок визначення пріоритетності рухомих об'єктів та вибору типу маневру, до яких також під'єднаний блок врахування глобального оптимуму по критерію мінімального відхилення рухомих об'єктів від початкових траєкторій руху, а також наявна загальна лінія зворотного зв'язку.
Текст
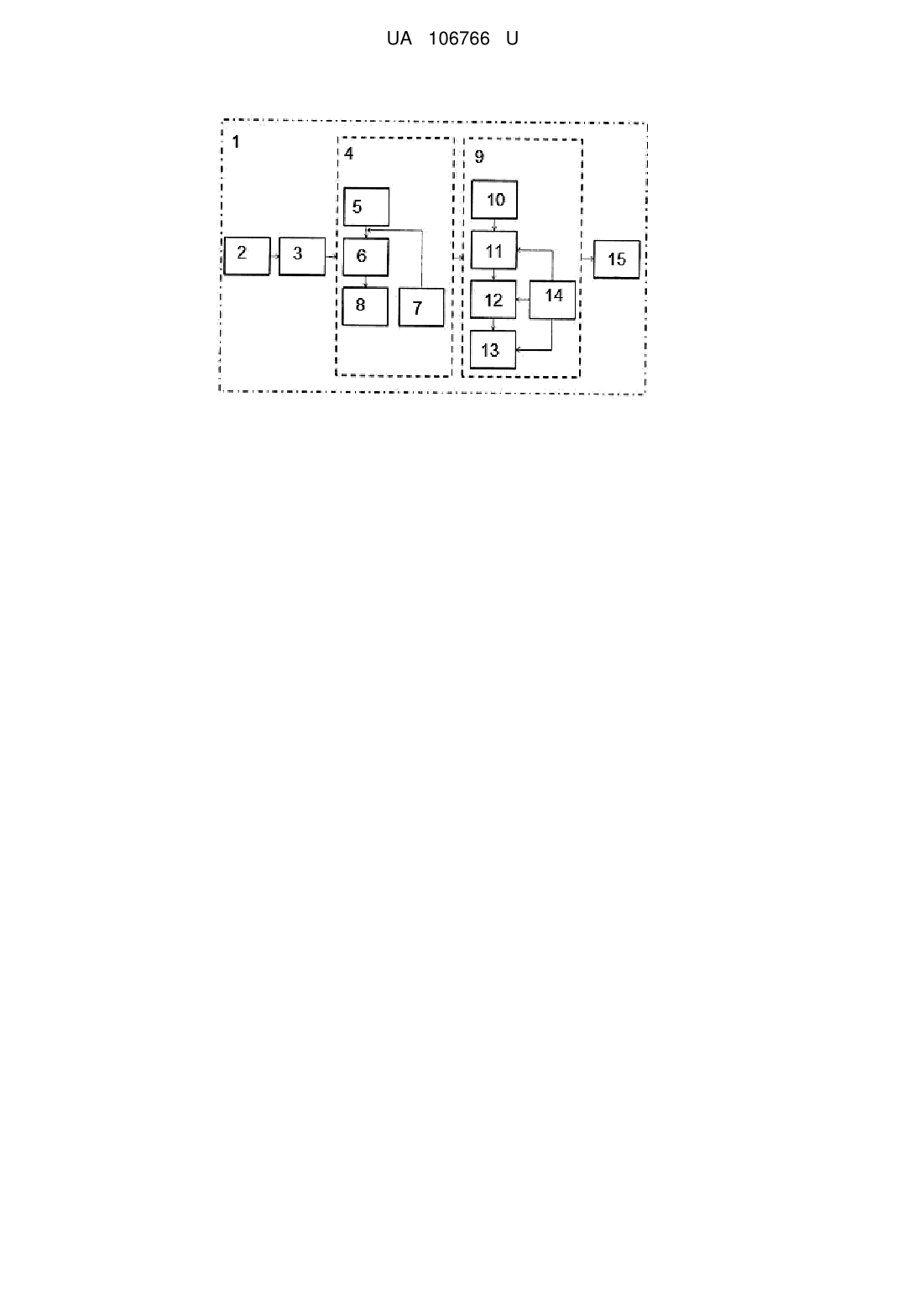
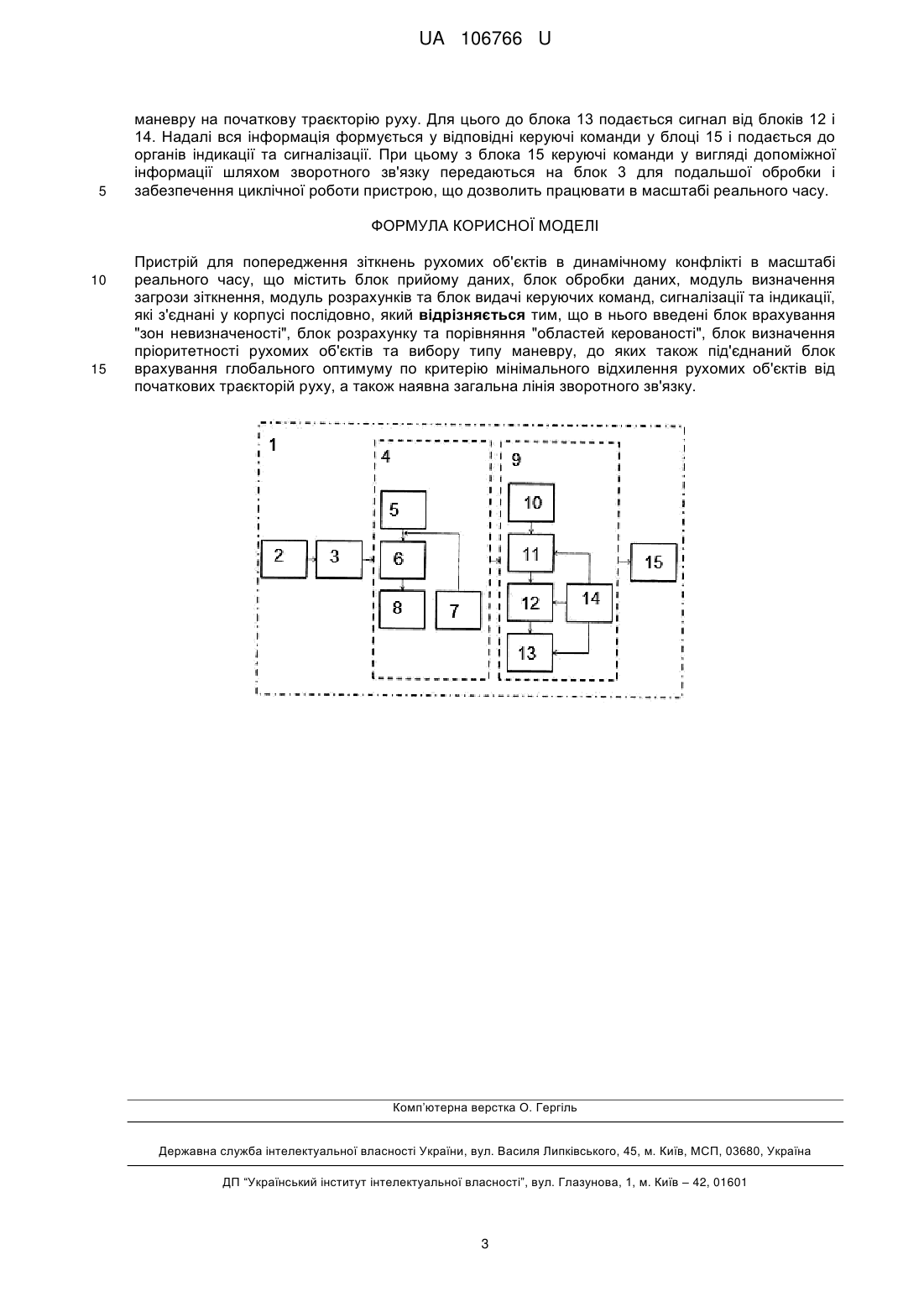
Реферат: Пристрій для попередження зіткнень рухомих об'єктів в динамічному конфлікті в масштабі реального часу містить блок прийому даних, блок обробки даних, модуль визначення загрози зіткнення, модуль розрахунків та блок видачі керуючих команд, сигналізації та індикації, які з'єднані у корпусі послідовно. Додатково в нього введені блок врахування "зон невизначеності", блок розрахунку та порівняння "областей керованості", блок визначення пріоритетності рухомих об'єктів та вибору типу маневру, до яких також під'єднаний блок врахування глобального оптимуму по критерію мінімального відхилення рухомих об'єктів від початкових траєкторій руху, а також наявна загальна лінія зворотного зв'язку. UA 106766 U (12) UA 106766 U UA 106766 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі авіації, а більш конкретно до систем автоматичного керування, обчислювальної техніки, управління рухомими об'єктами, та, зокрема, до способів розв'язання конфліктних ситуацій (вирішення загрози зіткнень) в обмеженому просторі між рухомими об'єктами. Корисна модель поширюється на множину класів динамічних рухомих об'єктів, що мають як лінійні, так і нелінійні характеристики, і можуть бути керовані в автоматичному, дистанційному і ручному режимах та може бути використаний в системах автоматичного керування для підвищення безпеки польотів в авіації. Відома система і спосіб її реалізації з запобігання зіткнень між транспортними засобами [Патент США № US 6510388В1, МПК G08G 5/04, G01S 13/93, 2013 (аналог)], вибрана як аналог, полягає в тому, що можливі траєкторії маневру ухилення для відповідного транспортного засобу розраховуються і порівнюються з траєкторіями маневру ухилення, розрахованими для інших транспортних засобів для контролю того, чи знаходиться траєкторія маневру ухилення для транспортного засобу в кожний момент свого розрахункового проміжку в межах заданої мінімальної відстані від траєкторії маневру ухилення інших транспортних засобів. Заявлена система видає попередження, у випадку, якщо порівняння показує, що траєкторія маневру ухилення в будь-який момент свого розрахункового проміжку знаходиться на відстані, яка менше ніж встановлена мінімальна дистанція від траєкторії маневру ухилення будь-яких інших транспортних засобів. Недоліками представленої відомої системи і способу її реалізації є те, що система видає попередження тільки у випадку безпосереднього ризику зіткнення і не враховує функціональних особливостей (аеродинамічні характеристики, вагу, швидкість, маневреність, прискорення та інше) кожного з транспортних засобів, що суттєво впливає на якість розрахункового процесу та виконання поставленої задачі. Найбільш близьким технічним рішенням, вибраним за прототип, є спосіб для попередження зіткнення літального апарата з перешкодою та пристрій для його реалізації [Патент РФ № 2325705, МПК G08G5/04, 2008]. Спосіб полягає у тому, що за координатами перешкоди визначають вид траєкторії руху перешкоди, розраховують найкоротшу відстань від літального апарату до апроксимованої траєкторії перешкоди, що дозволяє спрогнозувати можливість обліту або зіткнення з перешкодою. Задачею способу є підвищення оперативності та достовірності прогнозування зіткнення літального апарату з перешкодою за рахунок використання в якості критерію перетин апроксимованої траєкторії перешкоди зі сферою яка обумовлює літальний апарат. Пристрій, що забезпечує виконання способу використовує оптичні засоби для вимірювання відносного положення перешкоди, здійснює обробку зображення рухомого об'єкта, а саме визначає координати та відстань до перешкоди, а потім визначає відстань від літального апарата до траєкторії перешкоди і перевіряє умову достатньої віддаленості цієї траєкторії від літального апарату, що слугує критерієм для прийняття рішення про можливе зіткнення з перешкодою. Недоліки технічного рішення, вибраного за прототип: 1. Не враховуються "зони невизначеності" рухомих об'єктів (неточність визначення їх координат). 2. Не враховуються фізичні та функціональні властивості (аеродинамічні характеристики, вага, швидкість, маневреність, прискорення та інше) рухомого об'єкта та перешкоди, необхідні для проведення точних математичних розрахунків. 3. При зростанні кількості конфліктних ситуацій між рухомими об'єктами необмежено зростає складність обчислень, що у підсумку може призвести до обчислювального колапсу та ефекту "прокляття розмірності". 4. При розрахунку траєкторії маневру ухилення не обчислюються "області керованості" рухомими об'єктами, не враховуються критерії оптимальності, не визначаються пріоритетності руху об'єкта та перешкоди. 5. Пристрій для реалізації відомого способу викликає додаткові складності при впровадженні через свою технічну складність, необхідність додаткових матеріальних ресурсів та втручання у внутрішні системи рухомих об'єктів. В основу заявленої корисної моделі поставлена задача забезпечення гарантованого попередження зіткнень рухомих об'єктів в динамічному розрядженому (з необхідним і достатнім запасом часу) конфлікті в масштабі реального часу для підвищення безпеки польотів в авіації та ефективності використання авіаційної техніки шляхом виключення (усунення) недоліків прототипу. Корисна модель реалізована у вигляді окремого уніфікованого обладнання, що працює з використання супутникових та радіолокаційних систем навігації, що дозволить забезпечити визначення координат рухомих об'єктів в масштабі реального часу. 1 UA 106766 U 5 10 15 20 25 30 35 40 45 50 55 60 Поставлена задача вирішується тим, що в пристрої для попередження зіткнень рухомих об'єктів в динамічному конфлікті в масштабі реального часу, що містить корпус, в якому послідовно розташовані блок прийому даних і блок обробки даних, який під'єднаний до модулю визначення загроз зіткнення, який під'єднаний до модуля розрахунку і який під'єднаний до блока видачі керуючих команд, сигналізації та індикації, що у свою чергу далі під'єднаний до блока обробки даних, створюючи тим самим зворотній зв'язок. При цьому модуль визначення загроз зіткнень включає в себе блок визначення координат рухомих об'єктів, який під'єднаний до блока розрахунку прогнозованих траєкторій руху об'єктів, до якого також під'єднаний блок врахування "зон невизначеності", і який під'єднаний до блока аналізу даних та визначення загрози зіткнення. Крім цього, у модулі розрахунку розташований блок розрахунку та порівняння "областей керованості", який під'єднаний до блока визначення пріоритетності рухомих об'єктів та вибору типу маневру, що під'єднаний до блока визначення траєкторії маневру, який під'єднаний до блока визначення траєкторії повернення на початкову траєкторію, до яких у свою чергу під'єднаний блок врахування глобального оптимуму. Суть корисної моделі пояснюється на прикладі опису роботи структурної блок-схеми технічної реалізації заявленого пристрою, зображеної на кресленні. Як показано на кресленні, пристрій попередження зіткнень рухомих об'єктів в динамічному конфлікті в масштабі реального часу містить корпус 1, в якому послідовно розміщені блок прийому даних 2, блок обробки даних 3, модуль визначення загрози зіткнень 4, модуль розрахунку 9 і блок видачі керуючих команд, сигналізації та індикації 15, який зворотнім зв'язком під'єднаний до блока обробки даних 3. Модуль визначення загрози зіткнень 4 включає в себе блок визначення координат рухомих об'єктів 5, блок розрахунку прогнозованих траєкторій руху об'єктів 6 і блок аналізу даних та визначення загрози зіткнень 8, що з'єднані послідовно. Також на вхід блока розрахунку прогнозованих траєкторій руху об'єктів 6 подається сигнал з блока врахування "зон невизначеностей" 7, що розташований у модулі 4 окремо. Модуль розрахунку 9, у свою чергу, складається з блока розрахунку та порівняння "областей керованості" 10, блока визначення пріоритетності рухомих об'єктів та вибору типу маневру 11, блока визначення траєкторії маневру 12 та блока визначення траєкторії повернення на початкову траєкторію 13, що з'єднані послідовно. При цьому до блоків визначення пріоритетності рухомих об'єктів та вибору типу маневру 11, визначення траєкторії маневру 12 і визначення траєкторії повернення на початкову траєкторію 13 також подається сигнал від окремо розташованого у модулі 9 блока врахування глобального оптимуму 14. Пристрій працює наступним чином. На вхід блока 2 подається сигнал від навігаційних систем (радіолокаційних і супутникових). Сигнал містить в собі дані про всі рухомі об'єкти, що знаходяться в певній заданій обмеженій частині простору. З блока 2 сигнал передається на блок 3, де проходить цифрова обробка даних, їх перевірка та у разі необхідності певне накопичення. Далі сигнал з обробленими даними надходить на вхід модулю визначення загрози зіткнення 4. В модулі, а саме у блоці 5 відбувається визначення координат всіх рухомих об'єктів на просторові-часовій координатній сітці. До отриманих значень координат об'єктів у просторі додається дані про можливі "зони невизначеності" положення об'єктів. Виконання цього процесу забезпечує блок 7. Сукупна інформація далі надходить в блок 6, де на основі отриманих про рухомі об'єкти даних здійснюється розрахунок і моделювання прогнозованих траєкторій руху кожного з об'єктів. Відповідно до отриманих даних з блока 6, у блоці 8 відбувається їх аналіз та проводиться моделювання за програмними алгоритмами по визначенню ймовірності загрози зіткнення об'єктів. У випадку відсутність такої загрози робота пристрою циклічно поновлюється. У випадку наявності загрози зіткнення блок 8 забезпечує передачу інформації до модуля розрахунку 9. У модулі 9 інформація надходить на два блоки: блок 10 і блок 14. У блоці 14 інформація про рухомі об'єкти використовується для визначення і врахування критерію оптимальності (глобального оптимуму) можливих змін у русі об'єктів та забезпечення відповідних економічних показників. Ці показники та критерії надалі враховуються при обчисленнях для визначення траєкторій у блоках 11, 12 і 13, до яких подається сигнал з блока 14. У блоці 10 відбувається розрахунок "областей керованості" для кожного з рухомих об'єктів, що є учасниками конфлікту, у кожний момент часу з урахуванням всіх характеристик рухомого об'єкта. На основі отриманих з блока 10 даних у блоці 11 відбувається аналітичне визначення - який або які саме рухомі об'єкти будуть виконувати маневр ухилення (встановлюється на основі "областей керованості" пріоритетність об'єктів у конфлікті) і яким буде тип маневру (по висоті, швидкості, курсу або комбінація цих варіантів). Далі інформація з блока 11 у сукупності з інформацією від блоку 14 подається на блок 12, де відбувається безпосередньо розрахунок і визначення траєкторії маневру ухилення. У блоці 13 відбувається розрахунок і визначення траєкторії повернення після 2 UA 106766 U 5 маневру на початкову траєкторію руху. Для цього до блока 13 подається сигнал від блоків 12 і 14. Надалі вся інформація формується у відповідні керуючі команди у блоці 15 і подається до органів індикації та сигналізації. При цьому з блока 15 керуючі команди у вигляді допоміжної інформації шляхом зворотного зв'язку передаються на блок 3 для подальшої обробки і забезпечення циклічної роботи пристрою, що дозволить працювати в масштабі реального часу. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Пристрій для попередження зіткнень рухомих об'єктів в динамічному конфлікті в масштабі реального часу, що містить блок прийому даних, блок обробки даних, модуль визначення загрози зіткнення, модуль розрахунків та блок видачі керуючих команд, сигналізації та індикації, які з'єднані у корпусі послідовно, який відрізняється тим, що в нього введені блок врахування "зон невизначеності", блок розрахунку та порівняння "областей керованості", блок визначення пріоритетності рухомих об'єктів та вибору типу маневру, до яких також під'єднаний блок врахування глобального оптимуму по критерію мінімального відхилення рухомих об'єктів від початкових траєкторій руху, а також наявна загальна лінія зворотного зв'язку. Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюThe device for preventing collision of moving objects in dynamic conflict in real time
Автори англійськоюPavlov Vadym Volodymyrovych, Volkov Oleksandr Yevhenovych
Назва патенту російськоюУстройство для предупреждения столкновений движущихся объектов в динамическом конфликте в масштабе реального времени
Автори російськоюПавлов Вадим Володимирович, Волков Олександр Евгенович
МПК / Мітки
МПК: G05B 15/00, G05B 17/00, G06N 7/00, G05B 1/00, G08G 5/04, G06F 9/00
Мітки: попередження, масштабі, рухомих, динамічному, зіткнень, часу, пристрій, реального, конфлікті, об'єктів
Код посилання
<a href="https://ua.patents.su/5-106766-pristrijj-dlya-poperedzhennya-zitknen-rukhomikh-obehktiv-v-dinamichnomu-konflikti-v-masshtabi-realnogo-chasu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для попередження зіткнень рухомих об’єктів в динамічному конфлікті в масштабі реального часу</a>
Спосіб попередження зіткнень рухомих об’єктів в динамічному конфлікті в масштабі реального часу
Номер патенту: 106765
Опубліковано: 10.05.2016
Автори: Павлов Вадим Володимирович, Волков Олександр Євгенович
МПК: G06N 7/00, G08G 5/04, G05B 1/00, G05B 17/00, G06F 9/00, G05B 15/00
Мітки: динамічному, спосіб, часу, реального, зіткнень, рухомих, масштабі, об'єктів, попередження, конфлікті
Формула / Реферат:
Спосіб попередження зіткнень рухомих об'єктів в динамічному конфлікті в масштабі реального часу, в якому визначають координати руху кожного рухомого об'єкта в даній обмеженій частині простору, розраховують прогнозовані траєкторії руху об'єктів і у разі виявлення загрози можливого зіткнення (наявності розрядженого конфлікту) визначають траєкторії необхідного маневру ухилення для одного або декількох рухомих об'єктів, які є учасниками...
Пристрій для попередження зіткнень повітряних суден
Номер патенту: 25757
Опубліковано: 30.10.1998
Автори: Троценко Володимир Петрович, Корнійчук Май Тихонович, Совтус Інна Кузьмівна, Семенченко Андрій Іванович, Білецький Анатолій Якович, Шутко Микола Олександрович
МПК: G06F 15/17
Мітки: суден, повітряних, зіткнень, пристрій, попередження
Формула / Реферат:
1. Пристрій для попередження зіткнень повітряних суден [1], що містить три регістри, дешифратор, три елементи АБО, два суматори, блок постійної пам'яті, n елементів І, n блоків обробки першої, другої та третьої координати, n блоків аналізу курсу, виходи яких утворюють n перших керуючих виходів пристрою, інформаційні входи першого, другого й третього регістрів є першою, другою й третьою групами одноіменних входів пристрою відповідно, виходи...
Пристрій для попередження зіткнень на залізничному переїзді
Номер патенту: 6360
Опубліковано: 16.05.2005
Автори: Матвієнко Сергій Миколайович, Мельник Ярослав Андрійович, Мельник Олег Андрійович
МПК: G08G 1/04, B61L 29/00, G08G 1/16
Мітки: переїзді, попередження, пристрій, залізничному, зіткнень
Формула / Реферат:
1. Пристрій для попередження зіткнень на залізничному переїзді, що містить блок контролю наявності перешкоди в зоні переїзду, аналізатор сигналів наявності перешкоди, блок контролю наявності потягу на ділянці наближення, який відрізняється тим, що він додатково оснащений схемою керування, модулятором, передавачем, блоком виявлення рухомого складу в зоні переїзду, при цьому блок контролю наявності перешкоди в зоні переїзду містить не менше...
Спосіб позиціонування за інформацією системи попередження зіткнень літаків
Номер патенту: 98724
Опубліковано: 12.05.2015
Автори: Остроумов Іван Вікторович, Кузьменко Наталія Сергіївна
МПК: G01C 21/00
Мітки: спосіб, позиціонування, зіткнень, попередження, системі, літаків, інформацією
Формула / Реферат:
Спосіб позиціонування за інформацією системи попередження зіткнень літаків, що полягає у розрахунку координат місцеположення повітряного корабля, який відрізняється тим, що координати місцеположення оточуючих літаків та відстані до них отримують від системи попередження зіткнень літаків у повітрі і від приймача автоматичного залежного спостереження режиму "ES" та розв'язують систему навігаційних рівнянь за допомогою...
Пристрій для попередження зіткнень літальних апаратів
Номер патенту: 1802
Опубліковано: 25.10.1994
Автор: Горенюк Віктор Васильович
МПК: G08G 5/00
Мітки: літальних, апаратів, попередження, пристрій, зіткнень
Формула / Реферат:
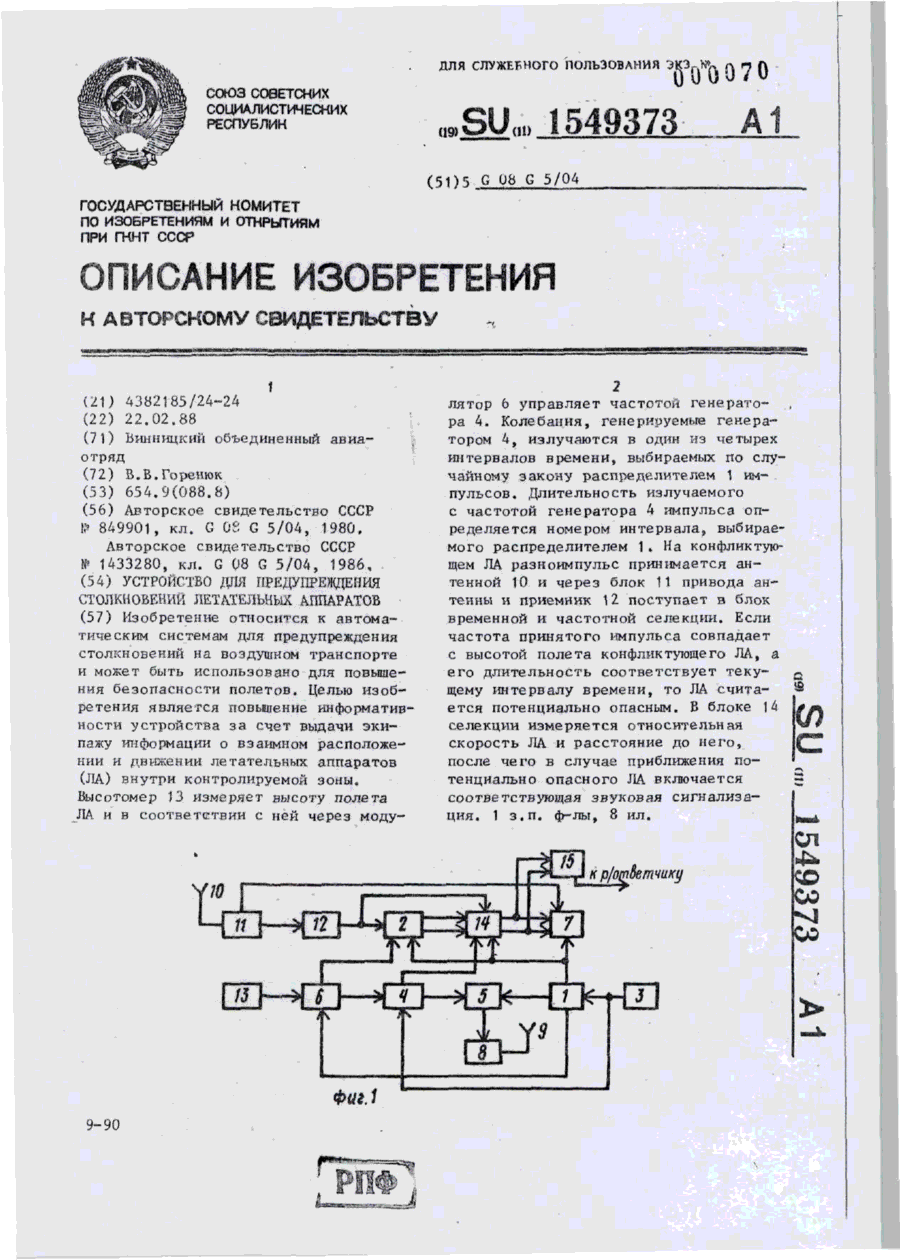
1. Устройство для предупреждения столкновений летательных аппаратов, содержащее высотомер, выход которого соединен с информационным входом модулятора, первый выход которого подключен ко входу управления генератора несущей частоты, первый выход которого соединен с информационным входом манипулятора, выход которого через усилитель подключен ко входу передающей антенны, генератор опорной частоты, выход которого соединен со входом...
Попередній патент: Спосіб попередження зіткнень рухомих об’єктів в динамічному конфлікті в масштабі реального часу
Наступний патент: Спосіб отримання біологічних добрив
Випадковий патент: Прес-вайма