Спосіб попередження зіткнень рухомих об’єктів в динамічному конфлікті в масштабі реального часу
Номер патенту: 106765
Опубліковано: 10.05.2016
Автори: Павлов Вадим Володимирович, Волков Олександр Євгенович

Формула / Реферат
Спосіб попередження зіткнень рухомих об'єктів в динамічному конфлікті в масштабі реального часу, в якому визначають координати руху кожного рухомого об'єкта в даній обмеженій частині простору, розраховують прогнозовані траєкторії руху об'єктів і у разі виявлення загрози можливого зіткнення (наявності розрядженого конфлікту) визначають траєкторії необхідного маневру ухилення для одного або декількох рухомих об'єктів, які є учасниками конфліктної ситуації, який відрізняється тим, що для кожного рухомого об'єкта задають умовну "зону невизначеності" його положення, траєкторії прогнозованого руху об'єктів розраховують в масштабі реального часу, розрахунки здійснюють для двох і більше об'єктів, для кожного з них розраховують "області керованості", що характеризують можливості рухомого об'єкта по зміні параметрів руху в кожний момент часу і дозволяють характеризувати нелінійність поведінки об'єктів і процесу конфлікту взагалі, на основі отриманих "областей керованості" кожного рухомого об'єкта та за допомогою програмного алгоритму визначають об'єкт або об'єкти, що будуть виконувати маневр ухилення (встановлюючи їм пріоритети), визначають тип маневру ухилення на основі "областей керованості" з урахуванням закладеної бази даних зі збіркою загальних правил ухилення об'єктів у разі можливої загрози зіткнення, враховують як критерій оптимальності глобальний оптимум по критерію мінімального відхилення рухомих об'єктів від початкових траєкторій руху (міра відхилення від маршруту), визначають траєкторії маневру ухилення та подальшого повернення на початкову траєкторію, здійснюють алгоритм роботи способу з постійною циклічністю.
Текст
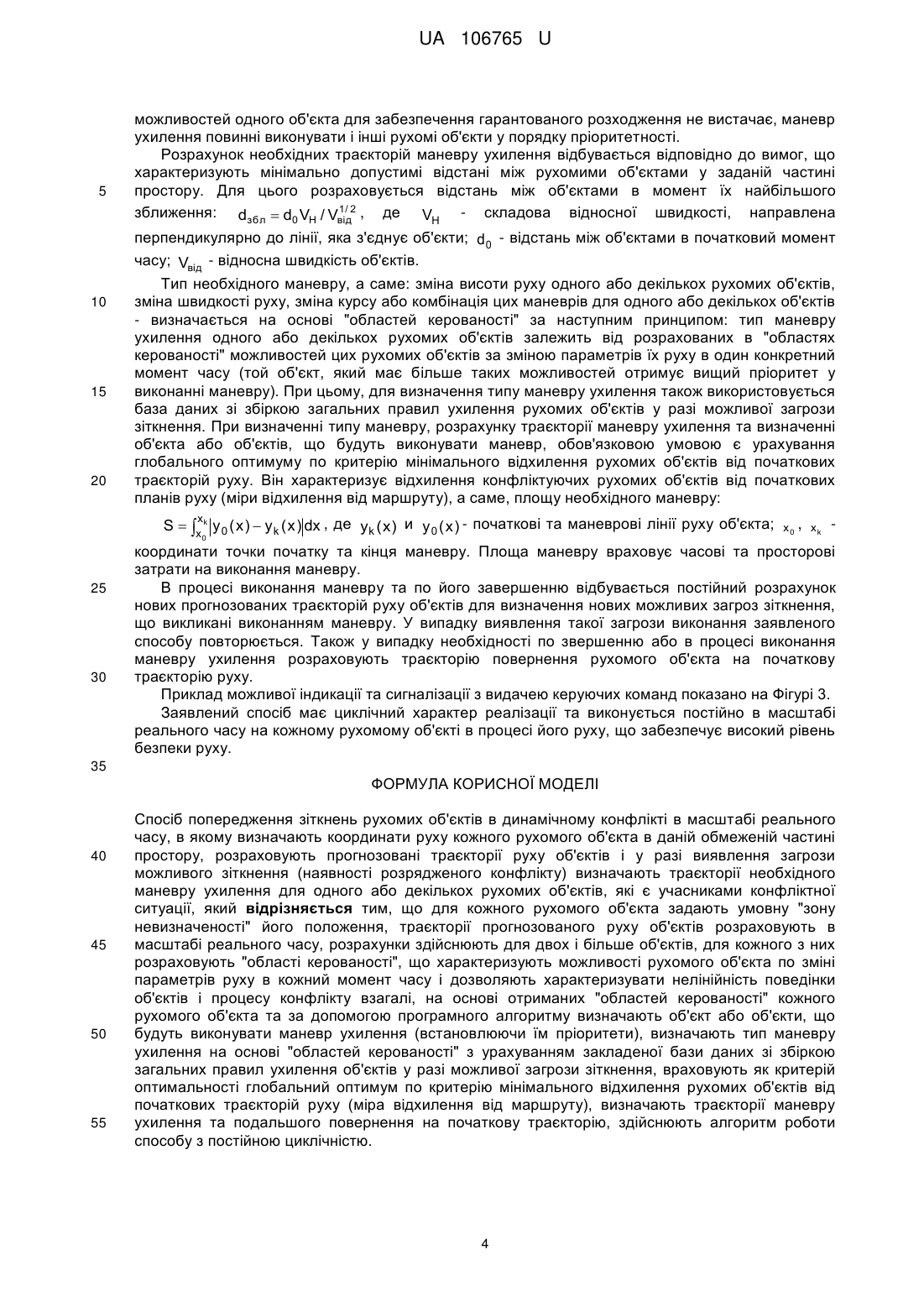
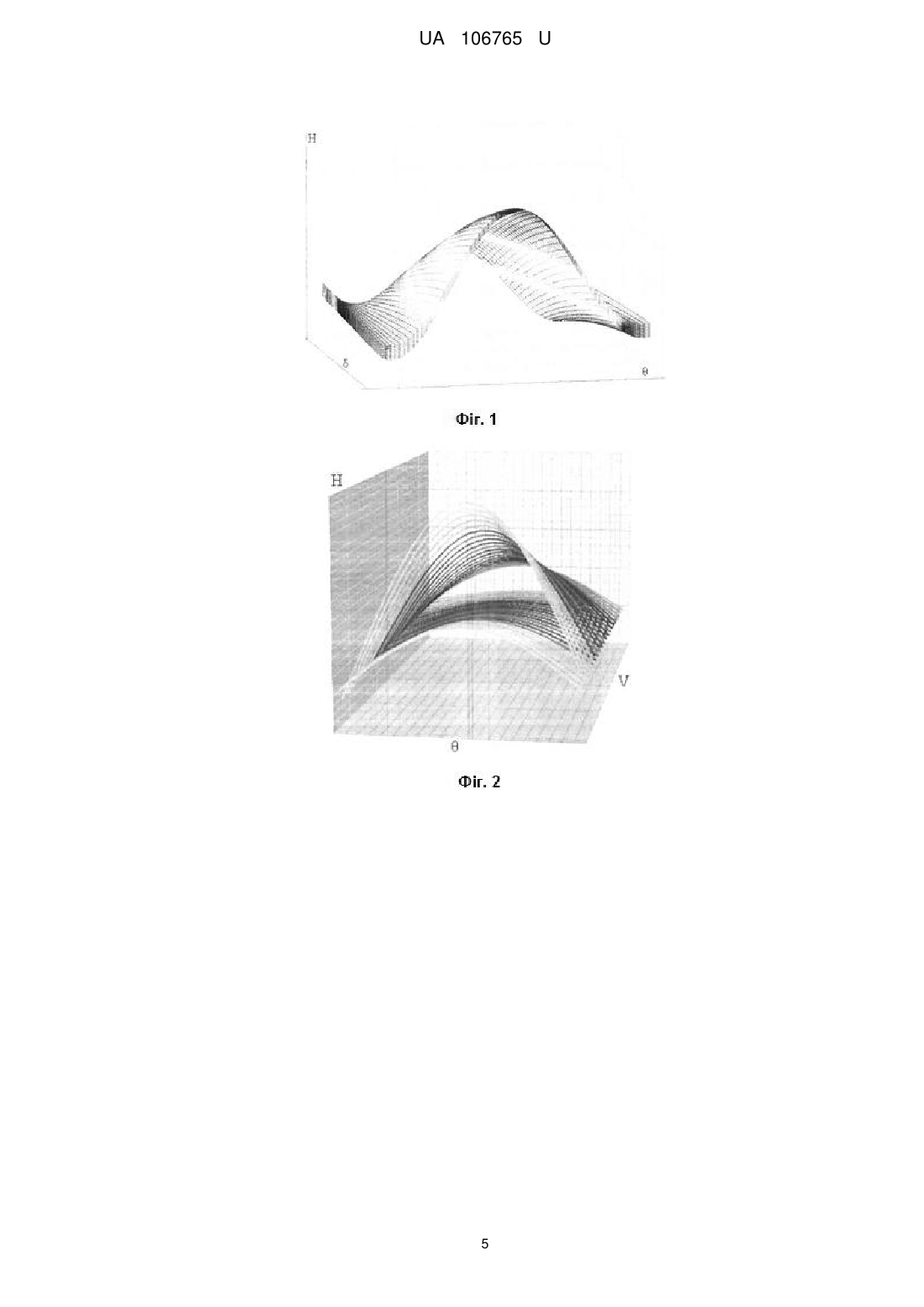
Реферат: Спосіб попередження зіткнень рухомих об'єктів в динамічному конфлікті в масштабі реального часу, в якому визначають координати руху кожного рухомого об'єкта в даній обмеженій частині простору. Розраховують прогнозовані траєкторії руху об'єктів і у разі виявлення загрози можливого зіткнення (наявності розрядженого конфлікту) визначають траєкторії необхідного маневру ухилення для одного або декількох рухомих об'єктів, які є учасниками конфліктної ситуації. Для кожного рухомого об'єкта задають умовну "зону невизначеності" його положення, траєкторії прогнозованого руху об'єктів розраховують в масштабі реального часу, розрахунки здійснюють для двох і більше об'єктів, для кожного з них розраховують "області керованості", що характеризують можливості рухомого об'єкта по зміні параметрів руху в кожний момент часу і дозволяють характеризувати нелінійність поведінки об'єктів і процесу конфлікту взагалі. На основі отриманих "областей керованості" кожного рухомого об'єкта та за допомогою програмного алгоритму визначають об'єкт або об'єкти, що будуть виконувати маневр ухилення (встановлюючи їм пріоритети). Визначають тип маневру ухилення на основі "областей керованості" з урахуванням закладеної бази даних зі збіркою загальних правил ухилення об'єктів у разі можливої загрози зіткнення, враховують як критерій оптимальності глобальний оптимум по критерію мінімального відхилення рухомих об'єктів від початкових траєкторій руху. Визначають траєкторії маневру ухилення та подальшого повернення на початкову траєкторію, здійснюють алгоритм роботи способу з постійною циклічністю. UA 106765 U (12) UA 106765 U UA 106765 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі авіації, а більш конкретно належить до систем автоматичного керування, обчислювальної техніки, управління рухомими об'єктами, та, зокрема, до способів розв'язання конфліктних ситуацій (вирішення загрози зіткнень) в обмеженому просторі між рухомими об'єктами. Корисна модель поширюється на множину класів динамічних рухомих об'єктів, що мають як лінійні, так і нелінійні характеристики, і можуть бути керовані в автоматичному, дистанційному і ручному режимах та може бути використаний в системах автоматичного керування для підвищення безпеки польотів в авіації. Відома система і спосіб її реалізації з запобігання зіткнень між транспортними засобами [Патент США № US 6510388В1, МПК G08G 5/04, G01S 13/93, 2013 (аналог)], вибрана як аналог, полягає в тому, що можливі траєкторії маневру ухилення для відповідного транспортного засобу розраховуються і порівнюються з траєкторіями маневру ухилення, розрахованими для інших транспортних засобів для контролю того, чи знаходиться траєкторія маневру ухилення для транспортного засобу в кожний момент свого розрахункового проміжку в межах заданої мінімальної відстані від траєкторії маневру ухилення інших транспортних засобів. Заявлена система видає попередження, у випадку, якщо порівняння показує, що траєкторія маневру ухилення в будь-який момент свого розрахункового проміжку знаходиться на відстані, яка менше ніж встановлена мінімальна дистанція від траєкторії маневру ухилення будь-яких інших транспортних засобів. Недоліками представленої відомої системи і способу її реалізації є те, що система видає попередження тільки у випадку безпосереднього ризику зіткнення і не враховує функціональних особливостей (аеродинамічні характеристики, вагу, швидкість, маневреність, прискорення та інше) кожного з транспортних засобів, що суттєво впливає на якість розрахункового процесу та виконання поставленої задачі. Найбільш близьким технічним рішенням, вибраним за прототип, є спосіб для попередження зіткнення літального апарата з перешкодою та пристрій для його реалізації [Патент РФ № 2325705, МПК G08G 5/04, 2008 (прототип)]. Спосіб полягає у тому, що за координатами перешкоди визначають вид траєкторії руху перешкоди, розраховують найкоротшу відстань від літального апарата до апроксимованої траєкторії перешкоди, що дозволяє спрогнозувати можливість обліту або зіткнення з перешкодою. Задачею способу є підвищення оперативності та достовірності прогнозування зіткнення літального апарата з перешкодою за рахунок використання як критерію перетину апроксимованої траєкторії перешкоди зі сферою, яка обумовлює літальний апарат. Недоліки технічного рішення, вибраного за прототип: 1. Не враховуються "зони невизначеності" рухомих об'єктів (неточність визначення їх координат); 2. Не враховуються фізичні та функціональні властивості (аеродинамічні характеристики, вага, швидкість, маневреність, прискорення та інше) рухомого об'єкта та перешкоди, необхідні для проведення точних математичних розрахунків; 3. При зростанні кількості конфліктних ситуацій між рухомими об'єктами необмежено зростає складність обчислень, що у підсумку може призвести до обчислювального колапсу та ефекту "прокляття розмірності"; 4. При розрахунку траєкторії маневру ухилення не обчислюються "області керованості" рухомими об'єктами, не враховуються критерії оптимальності, не визначаються пріоритетності руху об'єкта та перешкоди. В основу корисної моделі поставлена задача забезпечення гарантованого попередження зіткнень рухомих об'єктів в динамічному розрядженому (з необхідним і достатнім запасом часу) конфлікті в масштабі реального часу для підвищення безпеки польотів в авіації та ефективності використання авіаційної техніки шляхом виключення (усунення) недоліків прототипу. Поставлена задача вирішується тим, що в способі попередження зіткнень рухомих об'єктів в динамічному конфлікті в масштабі реального часу, при якому визначають координати руху кожного з об'єктів в заданій зоні простору і задають їм умовну "зону невизначеності" для урахування можливих відхилень місцезнаходження об'єктів, з рухомих об'єктів передають за допомогою мережевих технологій дані, необхідні для проведення відповідних розрахунків, розраховують прогнозовані (апроксимовані) траєкторії руху об'єктів в кожний момент часу за умови стабільного збереження швидкості руху, висоти та курсу об'єктів, визначають наявність перетину цих прогнозованих траєкторій різних рухомих об'єктів в заданій зоні простору в кожний момент часу, що свідчить про можливу загрозу зіткнення рухомих об'єктів (наявність розрядженого конфлікту), і при виявленні такої загрози обчислюють "області керованості" (засновані на урахуванні всіх характеристик рухомих об'єктів) для кожного з об'єктів і на основі їх порівняння визначають об'єкт або об'єкти, для яких необхідні та раціональні траєкторії 1 UA 106765 U 5 10 15 20 25 30 35 40 маневру ухилення, траєкторії маневру ухилення розраховують з урахуванням закладеної бази даних зі збіркою загальних правил ухилення об'єктів у разі можливої загрози зіткнення, враховують як критерій оптимальності глобальний оптимум по критерію мінімального відхилення рухомих об'єктів від початкових траєкторій руху (міра відхилення від маршруту), розраховують прогнозовані траєкторії руху об'єктів за новими траєкторіями маневру ухилення за умови збереження стабільної швидкості руху, висоти і курсу та здійснюють подальшу перевірку можливого перетину прогнозованих траєкторій руху об'єктів для визначення можливих загроз зіткнення, під час виконання об'єктом маневру ухилення, за необхідності також розраховують траєкторію повернення об'єкта на початкову траєкторію руху. Суть корисної моделі полягає в розрахунку та врахуванні прогнозованих траєкторій руху об'єктів в кожний момент часу, "зон невизначеності" та "областей керованості" рухомих об'єктів, не лінійності у поведінці рухомих об'єктів та процесу конфлікту взагалі, бази даних зі збіркою загальних правил ухилення об'єктів у разі можливої загрози зіткнення, глобального оптимуму по критерію мінімального відхилення, що забезпечується мережевими технологіями, і що дозволить виключити (усунути) недоліки прототипу та забезпечити гарантований рівень безпеки при попередженні зіткнень рухомих об'єктів в динамічному конфлікті. Надалі корисна модель пояснюється описом конкретного прикладу її виконання і прикладеними кресленнями, де зображені: на Фіг. 1 і 2 - приклад розрахованої можливої "області керованості" рухомого об'єкта за параметрами траєкторного, кінематичного та аеродинамічного керування; на Фіг. 3 - приклад можливої індикації, сигналізації та керуючих команд для рухомих об'єктів у випадку загрози зіткнення; Заявлений спосіб реалізується таким чином. На кожному рухомому об'єкті визначають координати всіх інших рухомих об'єктів, що знаходяться в певній заданій обмеженій зоні простору, за допомогою даних, що передаються від супутникових та радіолокаційних систем. Відповідно до визначених координат кожному рухомому об'єкту задають "зону невизначеності", що характеризує недостовірність визначеного та прогнозованого положення рухомого об'єкта, яка обумовлена похибками оцінки поточної ситуації, неадекватністю математичних моделей, впливом зовнішнього середовища, навігаційними похибками та інше. Для забезпечення гарантованого рівня безпеки, на основі проведених моделювань, визначено, що "зона невизначеності" повинна виглядати сферичною окружністю з рухомим об'єктом у центрі. Далі за допомогою мережевих технологій передачі даних рухомі об'єкти в заданій зоні простору обмінюються між собою даними, необхідними для проведення прогнозування та побудови траєкторій їх можливого руху в кожний момент часу, а також у разі необхідності для подальшого розрахунку їх "областей керованості". При цьому вважається, що швидкість руху, висота та курс об'єктів будуть незмінними. Процес визначення наявності перетину цих прогнозованих траєкторій руху різних рухомих об'єктів в заданій зоні простору в кожний момент часу, тобто процес визначення можливого розрядженого конфлікту (загрози зіткнення) здійснюється наступним чином. Ймовірність конфлікту визначається як ймовірність того, що відстань між двома або більше рухомими об'єктами стане меншою деякого встановленого значення. В загальному вигляді, якщо рух двох об'єктів у просторі задано векторами швидкостей V 1 і V 2 , то максимальне зближення об'єктів (відстань розходження) визначають із виразу: rmin V 12 * d / V12 , де V12 V1 V 2 - вектор відносної швидкості; d вектор відстані між об'єктами. Час досягнення максимального зближення визначається: 45 2 t min 1/ V12 * d2 rmin . Відстань між об'єктами: 2 2 d( t ) ( Vвід t 2 2d0 Vзблt d0 )1/ 2 , де 2 2 Vвід ( V1 2 V1V2 cos V2 )1/ 2 - відносна швидкість об'єктів; Vсбл V1 cos 1 V2 cos(1 ) швидкість зближення об'єктів; 1 - пеленг другого об'єкта відносно напрямку руху першого; відносний курс; d 0 - відстань між об'єктами в початковий момент часу. Час до найбільшого 2 зближення: t збл d0 Vзбл / Vвід . Відстань між об'єктами dзбл в момент найбільшого зближення: 50 55 1/ dзбл d0 VH / Vвід2 , де VH V2 sin( 1 ) V1 sin 1 - складова відносної швидкості, направлена перпендикулярно до лінії, яка з'єднує об'єкти. У випадку перетину шляхів руху двох об'єктів, і якщо відомі їх координати, то відстань між об'єктами визначається: 2 2 L12 x1( t ) x 2 ( t ) y1( t ) y 2 ( t ) , дe x і y - координати об'єктів. Після виявлення можливої загрози зіткнення рухомих об'єктів, побудови прогнозованих траєкторій їх руху, визначення відстані та часу до зіткнення, на основі даних, які взаємно 2 UA 106765 U 5 10 передаються між об'єктами за допомогою мережевих технологій, обчислюють "області керованості" для кожного з об'єктів, які засновані на врахуванні всіх характеристик рухомих об'єктів. Під "областями керованості" розуміється побудова графіків залежностей певних керуючих характеристик рухомого об'єкта від інших керуючих характеристик того самого рухомого об'єкта. "Області керованості" характеризують можливості рухомих об'єктів по зміні параметрів руху в один момент часу і дозволяють характеризувати нелінійність поведінки рухомих об'єктів і процесу конфлікту взагалі. Для цього використовується математичний апарат кінематики та динаміки руху об'єкта. Для прикладу наводяться формули кінематики та динаміки руху повітряного судна (магістрального літака), з урахуванням всіх його аеродинамічних характеристик, зведені до параметричного вигляду виведення сил шляхом інтегрування та взяття похідних, які використовуються для розрахунку "областей керованості": L F ( , m,P, , , , , X , , Y , Z , ) 1 дв a a a a РКД U F1( t, (H,L, Z, m( t )),( , , РКД ) , ( , , a )U , ( пр , зак )U , ( V1, V2 , V3 ) H F2 (m,P, , в , , , X a , a , Ya , Z a , РКД ) F2 ( t, (H,L, Z, m( t )),( , РКД )U , ( , , a )U , ( пр , зак )U , ( V1, V2 , V3 )); Z F3 ( , m,P, , дв , , , X a , a , Ya , Z a , РКД ) 15 20 25 30 F3 ( t, (H,L, Z, m( t )),( , , РКД )U , ( , , a )U , ( пр , зак )U , ( V1, V2 , V3 )), де - кут рискання; m - вага літака; P - тяга літака; - кут атаки; φдв - кут установки двигуна; - кут ковзання; - кут тангажу; X a - аеродинамічна сила лобового опору; a - кут крену; Ya - аеродинамічна підйомна сила; Z a - аеродинамічна бічна сила; РКД - кут установки ручки керування двигуном; H - висота; L - пройдений шлях; Z - бічний зсув; m( t ) - зміна ваги за часом; t - час моделювання; пр - кут установки передкрилків; зак - кут установки закрилків; V1, V2 , V3 - складові вітру по осях; L,H, Z - сили, які діють на літак під час польоту (прискорення); 35 ( , , РКД )U - параметри елементів траєкторного керування; ( , , a )U - параметри елементів кінематичного керування; 40 45 ( пр , зак )U - параметри елементів аеродинамічного керування. Приклад можливої "області керованості", а саме впливу параметрів траєкторного керування на виникаюче прискорення показано на Фігурі 1. На Фігурі 2 показано приклад можливої "області керованості" прискоренням в залежності від швидкості руху та кута нахилу траєкторії. Розраховані і побудовані "області керованості" рухомих об'єктів порівнюються між собою за допомогою стандартних математичних алгоритмів і методів моделювання. На основі проведеного порівняння визначають рухомий об'єкт або об'єкти, яким необхідно виконувати маневр ухилення (визначають пріоритетність об'єктів). Принцип визначення такий: маневр ухилення повинен виконувати той об'єкт, який має більше для цього можливостей, однак, якщо 3 UA 106765 U 5 можливостей одного об'єкта для забезпечення гарантованого розходження не вистачає, маневр ухилення повинні виконувати і інші рухомі об'єкти у порядку пріоритетності. Розрахунок необхідних траєкторій маневру ухилення відбувається відповідно до вимог, що характеризують мінімально допустимі відстані між рухомими об'єктами у заданій частині простору. Для цього розраховується відстань між об'єктами в момент їх найбільшого 1/ зближення: dзбл d0 VH / Vвід2 , де VH - складова відносної швидкості, направлена перпендикулярно до лінії, яка з'єднує об'єкти; d 0 - відстань між об'єктами в початковий момент часу; Vвід - відносна швидкість об'єктів. 10 15 20 Тип необхідного маневру, а саме: зміна висоти руху одного або декількох рухомих об'єктів, зміна швидкості руху, зміна курсу або комбінація цих маневрів для одного або декількох об'єктів - визначається на основі "областей керованості" за наступним принципом: тип маневру ухилення одного або декількох рухомих об'єктів залежить від розрахованих в "областях керованості" можливостей цих рухомих об'єктів за зміною параметрів їх руху в один конкретний момент часу (той об'єкт, який має більше таких можливостей отримує вищий пріоритет у виконанні маневру). При цьому, для визначення типу маневру ухилення також використовується база даних зі збіркою загальних правил ухилення рухомих об'єктів у разі можливої загрози зіткнення. При визначенні типу маневру, розрахунку траєкторії маневру ухилення та визначенні об'єкта або об'єктів, що будуть виконувати маневр, обов'язковою умовою є урахування глобального оптимуму по критерію мінімального відхилення рухомих об'єктів від початкових траєкторій руху. Він характеризує відхилення конфліктуючих рухомих об'єктів від початкових планів руху (міри відхилення від маршруту), а саме, площу необхідного маневру: x S x k y 0 ( x ) y k ( x ) dx , де yk ( x ) и y 0 ( x ) - початкові та маневрові лінії руху об'єкта; 0 25 30 x0 , xk координати точки початку та кінця маневру. Площа маневру враховує часові та просторові затрати на виконання маневру. В процесі виконання маневру та по його завершенню відбувається постійний розрахунок нових прогнозованих траєкторій руху об'єктів для визначення нових можливих загроз зіткнення, що викликані виконанням маневру. У випадку виявлення такої загрози виконання заявленого способу повторюється. Також у випадку необхідності по звершенню або в процесі виконання маневру ухилення розраховують траєкторію повернення рухомого об'єкта на початкову траєкторію руху. Приклад можливої індикації та сигналізації з видачею керуючих команд показано на Фігурі 3. Заявлений спосіб має циклічний характер реалізації та виконується постійно в масштабі реального часу на кожному рухомому об'єкті в процесі його руху, що забезпечує високий рівень безпеки руху. 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 55 Спосіб попередження зіткнень рухомих об'єктів в динамічному конфлікті в масштабі реального часу, в якому визначають координати руху кожного рухомого об'єкта в даній обмеженій частині простору, розраховують прогнозовані траєкторії руху об'єктів і у разі виявлення загрози можливого зіткнення (наявності розрядженого конфлікту) визначають траєкторії необхідного маневру ухилення для одного або декількох рухомих об'єктів, які є учасниками конфліктної ситуації, який відрізняється тим, що для кожного рухомого об'єкта задають умовну "зону невизначеності" його положення, траєкторії прогнозованого руху об'єктів розраховують в масштабі реального часу, розрахунки здійснюють для двох і більше об'єктів, для кожного з них розраховують "області керованості", що характеризують можливості рухомого об'єкта по зміні параметрів руху в кожний момент часу і дозволяють характеризувати нелінійність поведінки об'єктів і процесу конфлікту взагалі, на основі отриманих "областей керованості" кожного рухомого об'єкта та за допомогою програмного алгоритму визначають об'єкт або об'єкти, щобудуть виконувати маневр ухилення (встановлюючи їм пріоритети), визначають тип маневру ухилення на основі "областей керованості" з урахуванням закладеної бази даних зі збіркою загальних правил ухилення об'єктів у разі можливої загрози зіткнення, враховують як критерій оптимальності глобальний оптимум по критерію мінімального відхилення рухомих об'єктів від початкових траєкторій руху (міра відхилення від маршруту), визначають траєкторії маневру ухилення та подальшого повернення на початкову траєкторію, здійснюють алгоритм роботи способу з постійною циклічністю. 4 UA 106765 U 5 UA 106765 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюA method for preventing the collision of moving objects in dynamic conflict in real time
Автори англійськоюPavlov Vadym Volodymyrovych, Volkov Oleksandr Yevhenovych
Назва патенту російськоюСпособ предупреждения столкновений движущихся объектов в динамическом конфликте в масштабе реального времени
Автори російськоюПавлов Вадим Владимирович, Волков Александр Евгеньевич
МПК / Мітки
МПК: G06N 7/00, G05B 1/00, G06F 9/00, G05B 15/00, G08G 5/04, G05B 17/00
Мітки: часу, об'єктів, динамічному, конфлікті, зіткнень, масштабі, спосіб, реального, попередження, рухомих
Код посилання
<a href="https://ua.patents.su/8-106765-sposib-poperedzhennya-zitknen-rukhomikh-obehktiv-v-dinamichnomu-konflikti-v-masshtabi-realnogo-chasu.html" target="_blank" rel="follow" title="База патентів України">Спосіб попередження зіткнень рухомих об’єктів в динамічному конфлікті в масштабі реального часу</a>
Спосіб попередження зіткнень на залізничному переїзді
Номер патенту: 9000
Опубліковано: 15.09.2005
Автори: Мельник Олег Андрійович, Мельник Ярослав Андрійович, Матвієнко Сергій Миколайович
МПК: G08G 1/04, B61L 29/00, G08G 1/16
Мітки: зіткнень, переїзді, попередження, спосіб, залізничному
Формула / Реферат:
Спосіб попередження зіткнень на залізничному переїзді, що включає виявлення перешкоди та передачу аварійного сигналу на рухомий склад, який відрізняється тим, що виявляють перешкоду за допомогою опромінення, наприклад, лазерного, а передають аварійний сигнал радіозв'язком у зоні ділянки наближення.
Пристрій для попередження зіткнень повітряних суден
Номер патенту: 25757
Опубліковано: 30.10.1998
Автори: Совтус Інна Кузьмівна, Білецький Анатолій Якович, Шутко Микола Олександрович, Корнійчук Май Тихонович, Троценко Володимир Петрович, Семенченко Андрій Іванович
МПК: G06F 15/17
Мітки: повітряних, зіткнень, пристрій, суден, попередження
Формула / Реферат:
1. Пристрій для попередження зіткнень повітряних суден [1], що містить три регістри, дешифратор, три елементи АБО, два суматори, блок постійної пам'яті, n елементів І, n блоків обробки першої, другої та третьої координати, n блоків аналізу курсу, виходи яких утворюють n перших керуючих виходів пристрою, інформаційні входи першого, другого й третього регістрів є першою, другою й третьою групами одноіменних входів пристрою відповідно, виходи...
Спосіб позиціонування за інформацією системи попередження зіткнень літаків
Номер патенту: 98724
Опубліковано: 12.05.2015
Автори: Кузьменко Наталія Сергіївна, Остроумов Іван Вікторович
МПК: G01C 21/00
Мітки: системі, спосіб, інформацією, позиціонування, попередження, зіткнень, літаків
Формула / Реферат:
Спосіб позиціонування за інформацією системи попередження зіткнень літаків, що полягає у розрахунку координат місцеположення повітряного корабля, який відрізняється тим, що координати місцеположення оточуючих літаків та відстані до них отримують від системи попередження зіткнень літаків у повітрі і від приймача автоматичного залежного спостереження режиму "ES" та розв'язують систему навігаційних рівнянь за допомогою...
Спосіб радіаційного моніторингу місцевості у режимі реального часу
Номер патенту: 50154
Опубліковано: 25.05.2010
Автори: Гордієнко Віктор Григорович, Гетманець Олег Михайлович, Дроздов Олександр Олександрович, Пеліхатий Микола Михайлович
МПК: G01T 1/15
Мітки: моніторингу, місцевості, часу, реального, радіаційного, спосіб, режимі
Формула / Реферат:
Спосіб радіаційного моніторингу місцевості у режимі реального часу за допомогою розміщення датчиків іонізуючих випромінювань на певній відстані один від одного, який відрізняється тим, що на підставі показників датчиків безперервно будується нелінійна регресійна модель поля випромінювання, згідно з якою неперервно визначається поле радіаційного фону та поле градієнта радіаційного фону, що дозволяє локалізувати джерела радіаційного...
Пристрій для попередження зіткнень на залізничному переїзді
Номер патенту: 6360
Опубліковано: 16.05.2005
Автори: Мельник Олег Андрійович, Мельник Ярослав Андрійович, Матвієнко Сергій Миколайович
МПК: G08G 1/16, B61L 29/00, G08G 1/04
Мітки: пристрій, залізничному, переїзді, попередження, зіткнень
Формула / Реферат:
1. Пристрій для попередження зіткнень на залізничному переїзді, що містить блок контролю наявності перешкоди в зоні переїзду, аналізатор сигналів наявності перешкоди, блок контролю наявності потягу на ділянці наближення, який відрізняється тим, що він додатково оснащений схемою керування, модулятором, передавачем, блоком виявлення рухомого складу в зоні переїзду, при цьому блок контролю наявності перешкоди в зоні переїзду містить не менше...
Попередній патент: Розподільник апарата об’ємного пневмопресингу
Наступний патент: Пристрій для попередження зіткнень рухомих об’єктів в динамічному конфлікті в масштабі реального часу
Випадковий патент: Спосіб виготовлення контактів з бар'єром шотткі на арсеніді галію