Мехатронний пристрій для переміщення в трубопроводах

Формула / Реферат
Мехатронний пристрій для переміщення в трубопроводах, який складається з корпусу, носової та хвостової розпірних частин, виконаних у вигляді герметично охопленого еластичною оболонкою пустотілого перфорованого циліндра, системи живлення стиснутим середовищем з каналами і лінією живлення, яка з'єднується з хвостовою та носовою розпірними частинами, який відрізняється тим, що носова та хвостова частини складаються з багатосекційних фіксуючих пневмокамер, поверх яких змонтовано пружну фрикційну оболонку, у кожній пневмокамері розташовано по два та більше електромагнітних розподілювачів та давачів тиску, в хвостовій камері додатково встановлено впускний розподілювач та електродвигун, який зв'язаний з енкодером та гнучкою муфтою, яка являє собою гнучку черв'ячну передачу, а на носовій частині закріплено оптичний дефектоскоп.
Текст
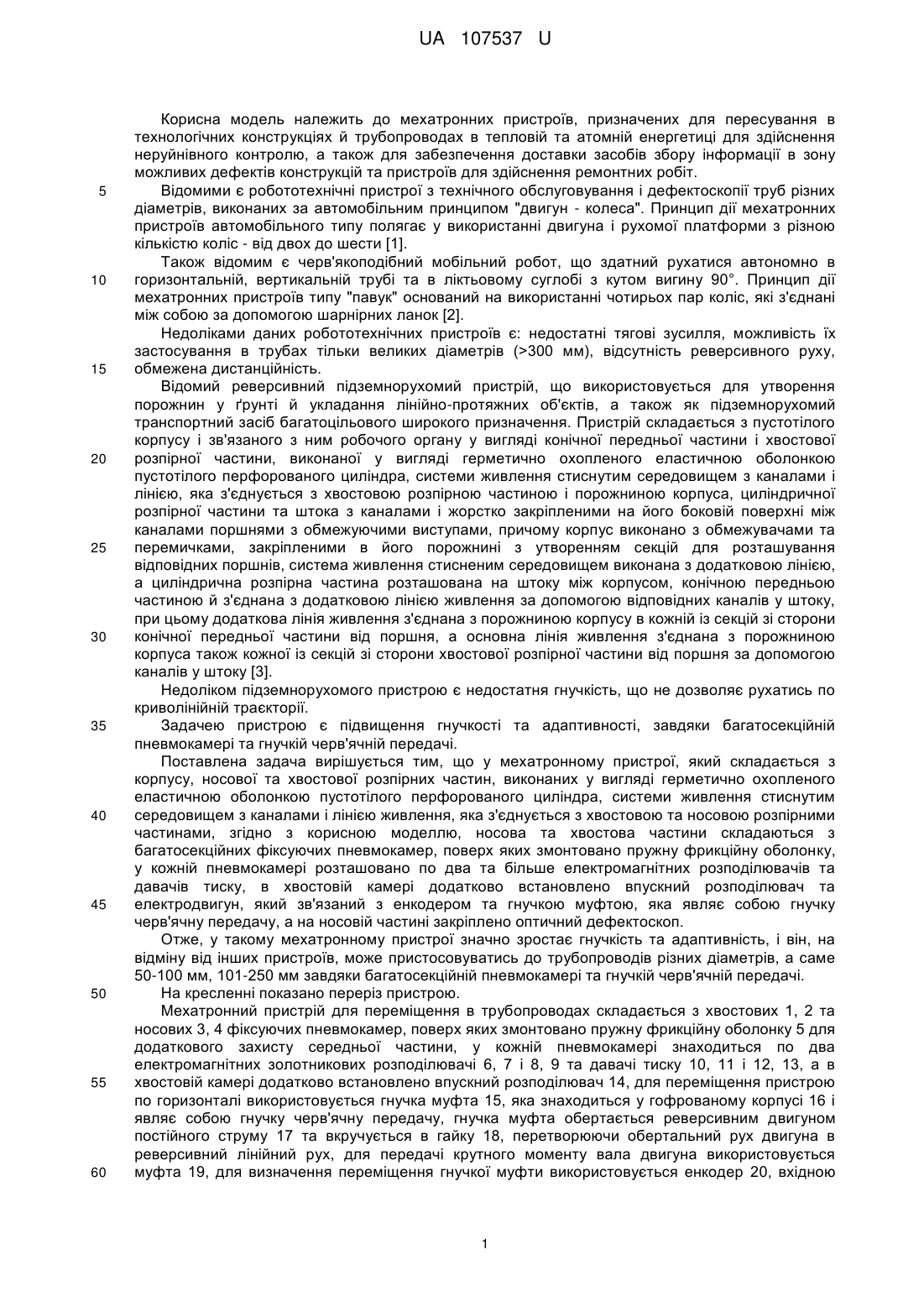
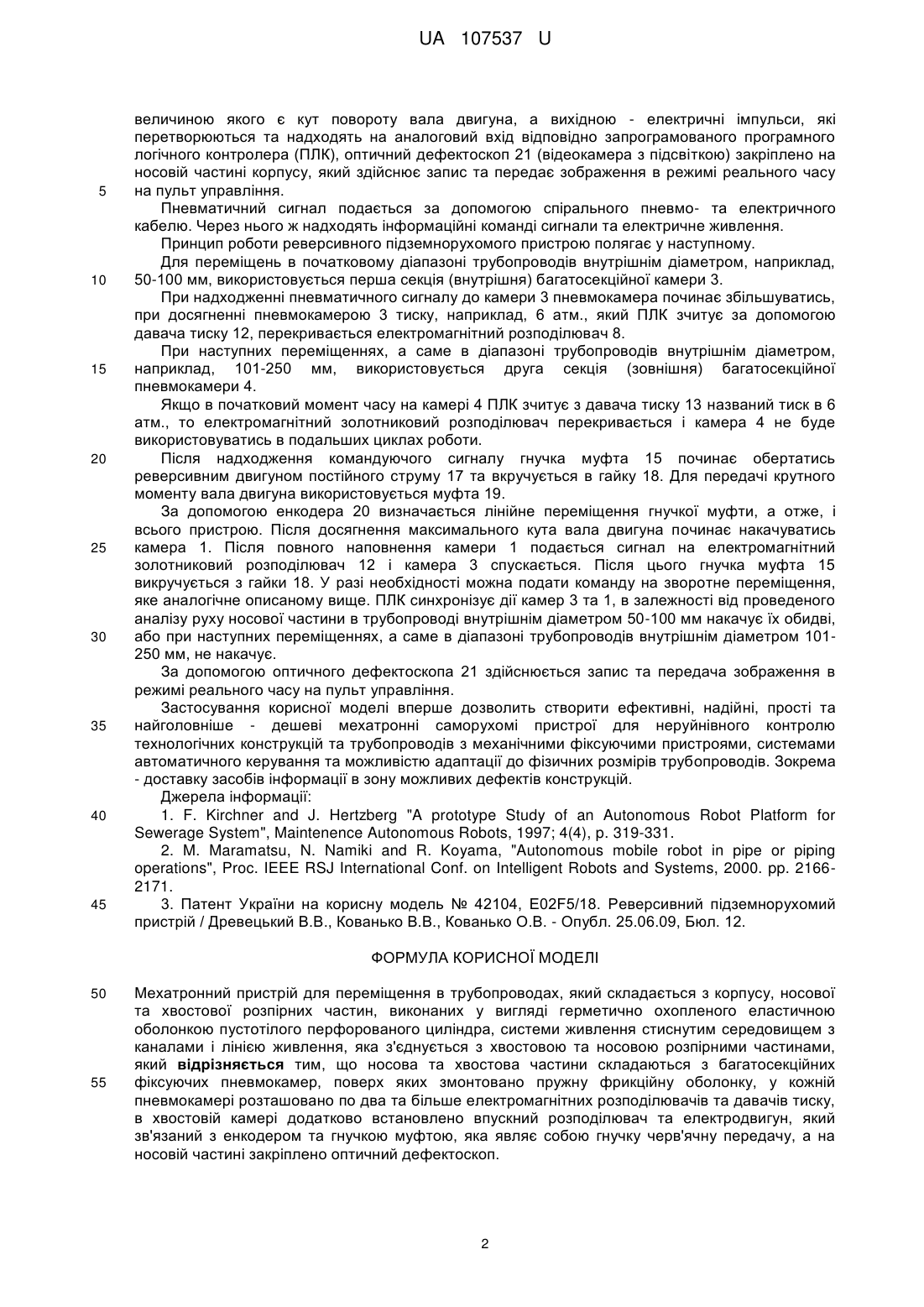
Реферат: UA 107537 U UA 107537 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до мехатронних пристроїв, призначених для пересування в технологічних конструкціях й трубопроводах в тепловій та атомній енергетиці для здійснення неруйнівного контролю, а також для забезпечення доставки засобів збору інформації в зону можливих дефектів конструкцій та пристроїв для здійснення ремонтних робіт. Відомими є робототехнічні пристрої з технічного обслуговування і дефектоскопії труб різних діаметрів, виконаних за автомобільним принципом "двигун - колеса". Принцип дії мехатронних пристроїв автомобільного типу полягає у використанні двигуна і рухомої платформи з різною кількістю коліс - від двох до шести [1]. Також відомим є черв'якоподібний мобільний робот, що здатний рухатися автономно в горизонтальній, вертикальній трубі та в ліктьовому суглобі з кутом вигину 90°. Принцип дії мехатронних пристроїв типу "павук" оснований на використанні чотирьох пар коліс, які з'єднані між собою за допомогою шарнірних ланок [2]. Недоліками даних робототехнічних пристроїв є: недостатні тягові зусилля, можливість їх застосування в трубах тільки великих діаметрів (>300 мм), відсутність реверсивного руху, обмежена дистанційність. Відомий реверсивний підземнорухомий пристрій, що використовується для утворення порожнин у ґрунті й укладання лінійно-протяжних об'єктів, а також як підземнорухомий транспортний засіб багатоцільового широкого призначення. Пристрій складається з пустотілого корпусу і зв'язаного з ним робочого органу у вигляді конічної передньої частини і хвостової розпірної частини, виконаної у вигляді герметично охопленого еластичною оболонкою пустотілого перфорованого циліндра, системи живлення стиснутим середовищем з каналами і лінією, яка з'єднується з хвостовою розпірною частиною і порожниною корпуса, циліндричної розпірної частини та штока з каналами і жорстко закріпленими на його боковій поверхні між каналами поршнями з обмежуючими виступами, причому корпус виконано з обмежувачами та перемичками, закріпленими в його порожнині з утворенням секцій для розташування відповідних поршнів, система живлення стисненим середовищем виконана з додатковою лінією, а циліндрична розпірна частина розташована на штоку між корпусом, конічною передньою частиною й з'єднана з додатковою лінією живлення за допомогою відповідних каналів у штоку, при цьому додаткова лінія живлення з'єднана з порожниною корпусу в кожній із секцій зі сторони конічної передньої частини від поршня, а основна лінія живлення з'єднана з порожниною корпуса також кожної із секцій зі сторони хвостової розпірної частини від поршня за допомогою каналів у штоку [3]. Недоліком підземнорухомого пристрою є недостатня гнучкість, що не дозволяє рухатись по криволінійній траєкторії. Задачею пристрою є підвищення гнучкості та адаптивності, завдяки багатосекційній пневмокамері та гнучкій черв'ячній передачі. Поставлена задача вирішується тим, що у мехатронному пристрої, який складається з корпусу, носової та хвостової розпірних частин, виконаних у вигляді герметично охопленого еластичною оболонкою пустотілого перфорованого циліндра, системи живлення стиснутим середовищем з каналами і лінією живлення, яка з'єднується з хвостовою та носовою розпірними частинами, згідно з корисною моделлю, носова та хвостова частини складаються з багатосекційних фіксуючих пневмокамер, поверх яких змонтовано пружну фрикційну оболонку, у кожній пневмокамері розташовано по два та більше електромагнітних розподілювачів та давачів тиску, в хвостовій камері додатково встановлено впускний розподілювач та електродвигун, який зв'язаний з енкодером та гнучкою муфтою, яка являє собою гнучку черв'ячну передачу, а на носовій частині закріплено оптичний дефектоскоп. Отже, у такому мехатронному пристрої значно зростає гнучкість та адаптивність, і він, на відміну від інших пристроїв, може пристосовуватись до трубопроводів різних діаметрів, а саме 50-100 мм, 101-250 мм завдяки багатосекційній пневмокамері та гнучкій черв'ячній передачі. На кресленні показано переріз пристрою. Мехатронний пристрій для переміщення в трубопроводах складається з хвостових 1, 2 та носових 3, 4 фіксуючих пневмокамер, поверх яких змонтовано пружну фрикційну оболонку 5 для додаткового захисту середньої частини, у кожній пневмокамері знаходиться по два електромагнітних золотникових розподілювачі 6, 7 і 8, 9 та давачі тиску 10, 11 і 12, 13, а в хвостовій камері додатково встановлено впускний розподілювач 14, для переміщення пристрою по горизонталі використовується гнучка муфта 15, яка знаходиться у гофрованому корпусі 16 і являє собою гнучку черв'ячну передачу, гнучка муфта обертається реверсивним двигуном постійного струму 17 та вкручується в гайку 18, перетворюючи обертальний рух двигуна в реверсивний лінійний рух, для передачі крутного моменту вала двигуна використовується муфта 19, для визначення переміщення гнучкої муфти використовується енкодер 20, вхідною 1 UA 107537 U 5 10 15 20 25 30 35 40 45 величиною якого є кут повороту вала двигуна, а вихідною - електричні імпульси, які перетворюються та надходять на аналоговий вхід відповідно запрограмованого програмного логічного контролера (ПЛК), оптичний дефектоскоп 21 (відеокамера з підсвіткою) закріплено на носовій частині корпусу, який здійснює запис та передає зображення в режимі реального часу на пульт управління. Пневматичний сигнал подається за допомогою спірального пневмо- та електричного кабелю. Через нього ж надходять інформаційні команді сигнали та електричне живлення. Принцип роботи реверсивного підземнорухомого пристрою полягає у наступному. Для переміщень в початковому діапазоні трубопроводів внутрішнім діаметром, наприклад, 50-100 мм, використовується перша секція (внутрішня) багатосекційної камери 3. При надходженні пневматичного сигналу до камери 3 пневмокамера починає збільшуватись, при досягненні пневмокамерою 3 тиску, наприклад, 6 атм., який ПЛК зчитує за допомогою давача тиску 12, перекривається електромагнітний розподілювач 8. При наступних переміщеннях, а саме в діапазоні трубопроводів внутрішнім діаметром, наприклад, 101-250 мм, використовується друга секція (зовнішня) багатосекційної пневмокамери 4. Якщо в початковий момент часу на камері 4 ПЛК зчитує з давача тиску 13 названий тиск в 6 атм., то електромагнітний золотниковий розподілювач перекривається і камера 4 не буде використовуватись в подальших циклах роботи. Після надходження командуючого сигналу гнучка муфта 15 починає обертатись реверсивним двигуном постійного струму 17 та вкручується в гайку 18. Для передачі крутного моменту вала двигуна використовується муфта 19. За допомогою енкодера 20 визначається лінійне переміщення гнучкої муфти, а отже, і всього пристрою. Після досягнення максимального кута вала двигуна починає накачуватись камера 1. Після повного наповнення камери 1 подається сигнал на електромагнітний золотниковий розподілювач 12 і камера 3 спускається. Після цього гнучка муфта 15 викручується з гайки 18. У разі необхідності можна подати команду на зворотне переміщення, яке аналогічне описаному вище. ПЛК синхронізує дії камер 3 та 1, в залежності від проведеного аналізу руху носової частини в трубопроводі внутрішнім діаметром 50-100 мм накачує їх обидві, або при наступних переміщеннях, а саме в діапазоні трубопроводів внутрішнім діаметром 101250 мм, не накачує. За допомогою оптичного дефектоскопа 21 здійснюється запис та передача зображення в режимі реального часу на пульт управління. Застосування корисної моделі вперше дозволить створити ефективні, надійні, прості та найголовніше - дешеві мехатронні саморухомі пристрої для неруйнівного контролю технологічних конструкцій та трубопроводів з механічними фіксуючими пристроями, системами автоматичного керування та можливістю адаптації до фізичних розмірів трубопроводів. Зокрема - доставку засобів інформації в зону можливих дефектів конструкцій. Джерела інформації: 1. F. Kirchner and J. Hertzberg "A prototype Study of an Autonomous Robot Platform for Sewerage System", Maintenence Autonomous Robots, 1997; 4(4), p. 319-331. 2. M. Maramatsu, N. Namiki and R. Koyama, "Autonomous mobile robot in pipe or piping operations", Proc. IEEE RSJ International Conf. on Intelligent Robots and Systems, 2000. pp. 21662171. 3. Патент України на корисну модель № 42104, E02F5/18. Реверсивний підземнорухомий пристрій / Древецький В.В., Кованько В.В., Кованько О.В. - Опубл. 25.06.09, Бюл. 12. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Мехатронний пристрій для переміщення в трубопроводах, який складається з корпусу, носової та хвостової розпірних частин, виконаних у вигляді герметично охопленого еластичною оболонкою пустотілого перфорованого циліндра, системи живлення стиснутим середовищем з каналами і лінією живлення, яка з'єднується з хвостовою та носовою розпірними частинами, який відрізняється тим, що носова та хвостова частини складаються з багатосекційних фіксуючих пневмокамер, поверх яких змонтовано пружну фрикційну оболонку, у кожній пневмокамері розташовано по два та більше електромагнітних розподілювачів та давачів тиску, в хвостовій камері додатково встановлено впускний розподілювач та електродвигун, який зв'язаний з енкодером та гнучкою муфтою, яка являє собою гнучку черв'ячну передачу, а на носовій частині закріплено оптичний дефектоскоп. 2 UA 107537 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 19/18
Мітки: пристрій, мехатронний, переміщення, трубопроводах
Код посилання
<a href="https://ua.patents.su/5-107537-mekhatronnijj-pristrijj-dlya-peremishhennya-v-truboprovodakh.html" target="_blank" rel="follow" title="База патентів України">Мехатронний пристрій для переміщення в трубопроводах</a>
Мехатронний захоплювальний пристрій
Номер патенту: 91970
Опубліковано: 25.07.2014
Автори: Іванова Людмила Іллівна, Якимчук Микола Володимирович, Звоник Ірина Олександрівна, Бабич Юрій Анатолійович
МПК: B65G 47/91
Мітки: мехатронний, захоплювальний, пристрій
Формула / Реферат:
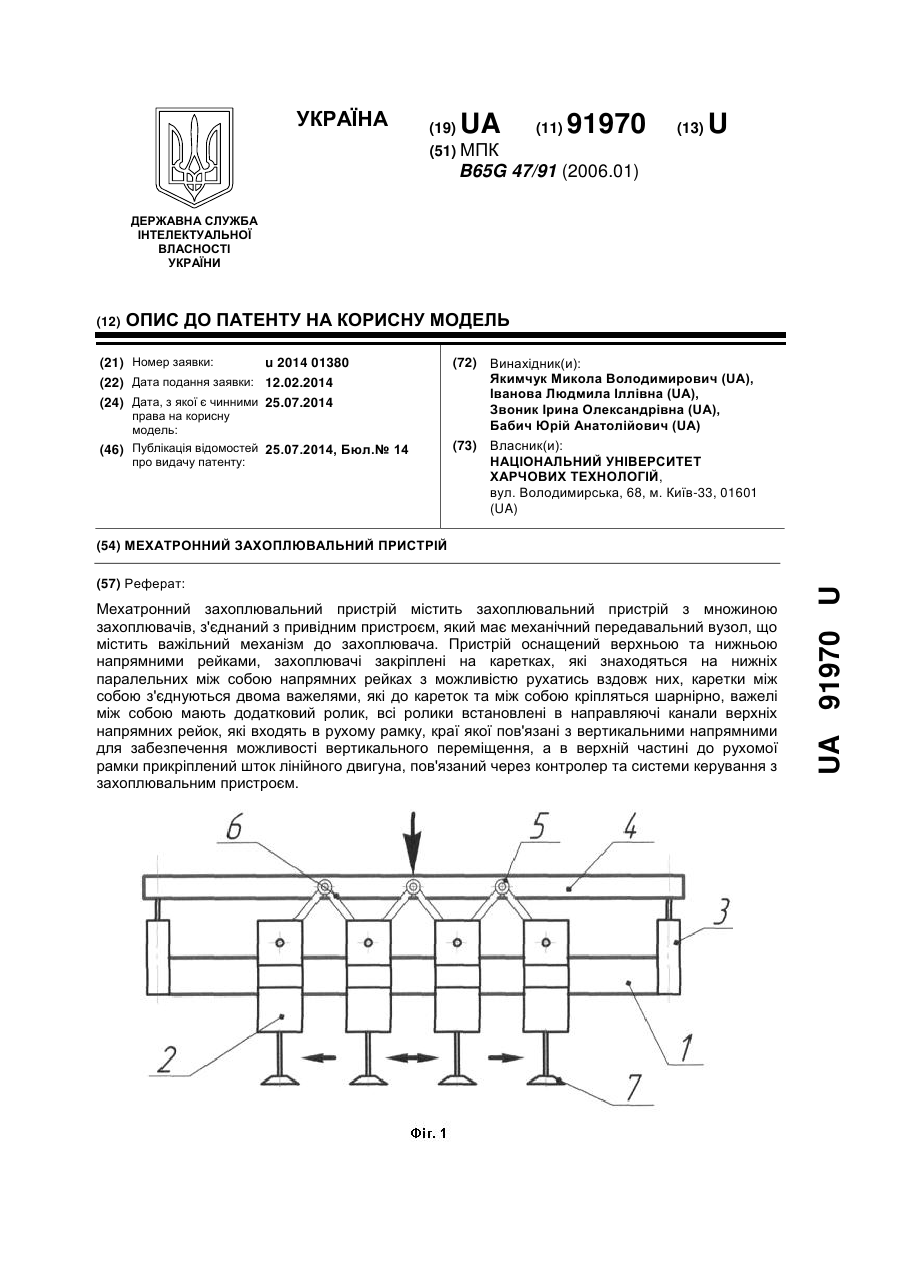
Мехатронний захоплювальний пристрій, що містить захоплювальний пристрій з множиною захоплювачів, з'єднаний з привідним пристроєм, який має механічний передавальний вузол, що містить важільний механізм до захоплювача, який відрізняється тим, що пристрій оснащений верхньою та нижньою напрямними рейками, захоплювачі закріплені на каретках, які знаходяться на нижніх паралельних між собою напрямних рейках з можливістю рухатись вздовж них, каретки...
Пристрій для діагностики та блокування потоку рідини або газу низького тиску в трубопроводах
Номер патенту: 48928
Опубліковано: 12.04.2010
Автор: Гончаренко Станіслав Вікторович
МПК: E03F 7/00
Мітки: трубопроводах, блокування, пристрій, діагностики, тиску, газу, низького, потоку, рідини
Формула / Реферат:
1. Пристрій для діагностики та блокування потоку рідини або газу низького тиску в трубопроводах, який містить систему відеоспостереження, яка складається принаймні із відеокамер прямого та бокового спостереження, вмонтованих всередину корпусу, штовхач, робочий орган перекриття трубопроводу з елементом для його фіксації і транспортування, систему вводу пристрою в трубопровід та систему керування, який відрізняється тим, що він додатково...
Пристрій для безперервного переміщення гнучких контейнерів від карусельного механізму до конвеєра і спосіб такого переміщення
Номер патенту: 97790
Опубліковано: 26.03.2012
Автори: Фурлотті Філіппо, Лє Брун Ренато
МПК: B65G 65/06, B65G 47/84, B67C 7/00, B65G 65/23
Мітки: переміщення, безперервного, механізму, конвеєра, пристрій, такого, спосіб, гнучких, карусельного, контейнерів
Формула / Реферат:
1. Пристрій для безперервного переміщення гнучких контейнерів від карусельного механізму (3) до конвеєра (4), який відрізняється тим, що в сукупності містить: карусельну конструкцію (5), по периметру якої розміщені захоплювачі (6) з губками (7), форма яких забезпечує можливість видалення окремих гнучких контейнерів (2) з карусельного механізму (3) у вертикальному положенні і наступний їх відпуск в горизонтальному положенні на конвеєр (4); і...
Пристрій для переміщення продуктів, застосування пристрою для переміщення продуктів і спосіб переміщення продуктів до пакування
Номер патенту: 109118
Опубліковано: 27.07.2015
Автори: Кершоу Ендрю Пол, Бейкер Джером Кіт, Джезеквел Алекс Джуліан
МПК: B65B 35/24, B65B 23/12, B65G 47/31, B65B 35/56, B65B 35/14, B65G 37/00
Мітки: пакування, переміщення, пристрій, застосування, продуктів, спосіб, пристрою
Формула / Реферат:
1. Пристрій для переміщення довільно направлених крихких твердих продуктів до пакування, який включає щонайменше один подавальний засіб для переміщення продуктів і віброконвеєр, виконаний для прийому продуктів зі щонайменше одного подавального засобу, який відрізняється тим, що віброконвеєр включає верхню частину з подавальною поверхнею, виконаною для збільшення поперечних проміжків між продуктами, і нижню частину з механічними засобами...
Пристрій для діагностики та блокування потоку рідини або газу низького тиску в трубопроводах
Номер патенту: 20888
Опубліковано: 15.02.2007
Автори: Сердюк Анатолій Іванович, Гончаренко Станіслав Вікторович, Ченчевий Валерій Генадієвич
МПК: E03F 7/00
Мітки: газу, низького, діагностики, пристрій, блокування, тиску, рідини, потоку, трубопроводах
Формула / Реферат:
1. Пристрій для діагностики та блокування потоку рідини або газу низького тиску в трубопроводах, який містить систему відеоспостереження, який відрізняється тим, що система відеоспостереження складається принаймні із відеокамер прямого та бокового спостереження, вмонтованих всередину корпусу, який додатково містить штовхач, робочий орган перекриття трубопроводу з механізмом для його фіксації і транспортування, електромагніт, систему вводу...
Попередній патент: Спосіб одержання гумінового добрива
Наступний патент: Термостійка композиція
Випадковий патент: Циліндрична модифікована лінза френеля