Спосіб розстановки робочих органів культиватора-рослинопідживлювача
Номер патенту: 107937
Опубліковано: 24.06.2016
Автори: Надикто Володимир Трохимович, Малюта Сергій Іванович, Мураль Євген Андрійович, Чаплинський Андрій Петрович


Формула / Реферат
Спосіб розстановки робочих органів культиватора рослинопідживлювача, який включає приєднання культиватора до енергетичного засобу (трактора), встановлення його на розміточній плиті рівної горизонтальної площадки, який відрізняється тим, що розстановку робочих органів у поздовжньому напрямі здійснюють так, що кожен їх наступний ряд по відношенню до попереднього встановлюють на відстані ![]() , яка визначається за виразом
, яка визначається за виразом
![]() ,
,
де ![]() - виліт лапи культиватора;
- виліт лапи культиватора;
![]() - глибина обробітку ґрунту;
- глибина обробітку ґрунту;
![]() - кут підйому лапи;
- кут підйому лапи;
![]() - кут тертя між лапою та ґрунтом;
- кут тертя між лапою та ґрунтом;
![]() - поступальна швидкість агрегату.
- поступальна швидкість агрегату.
Текст
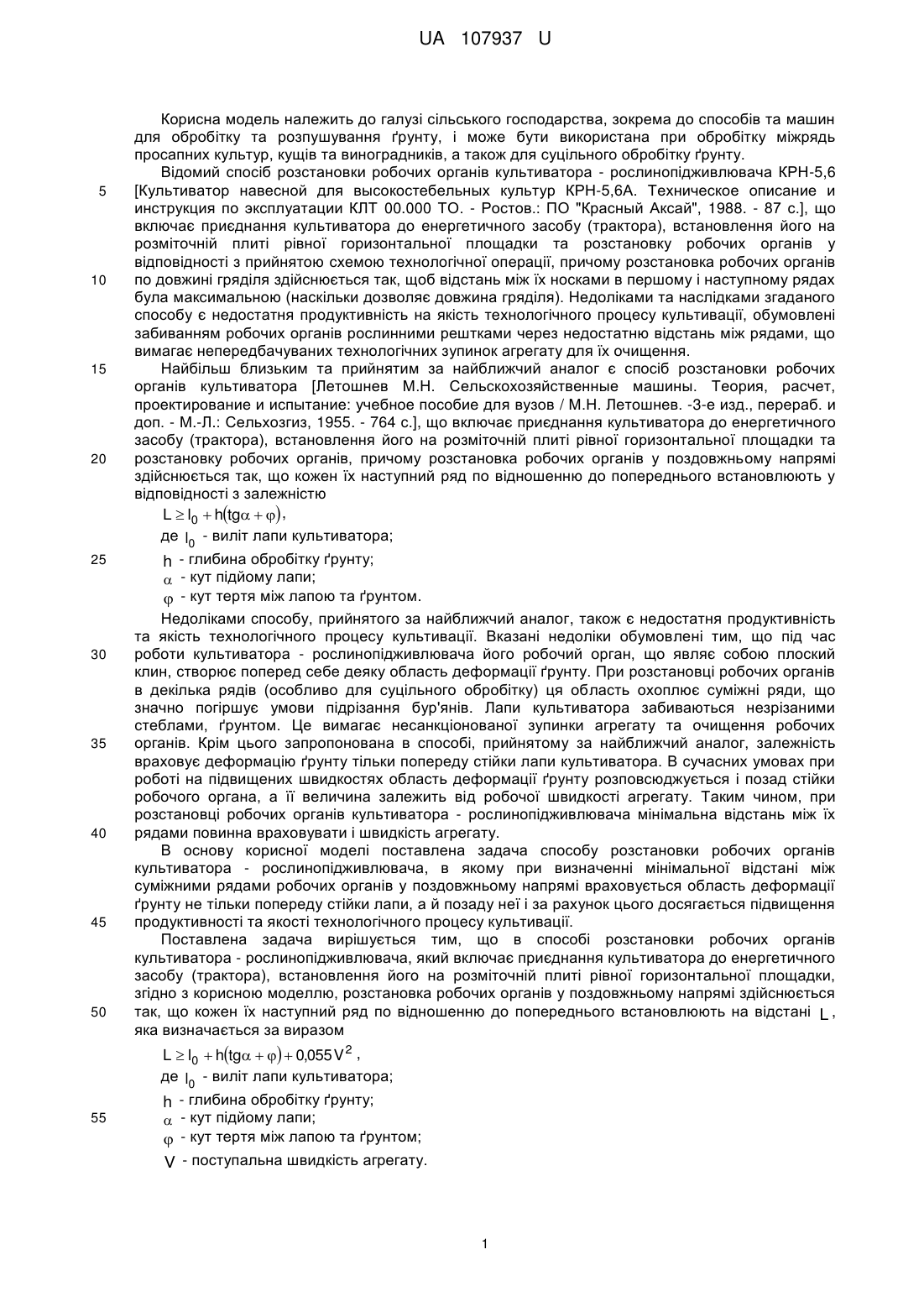
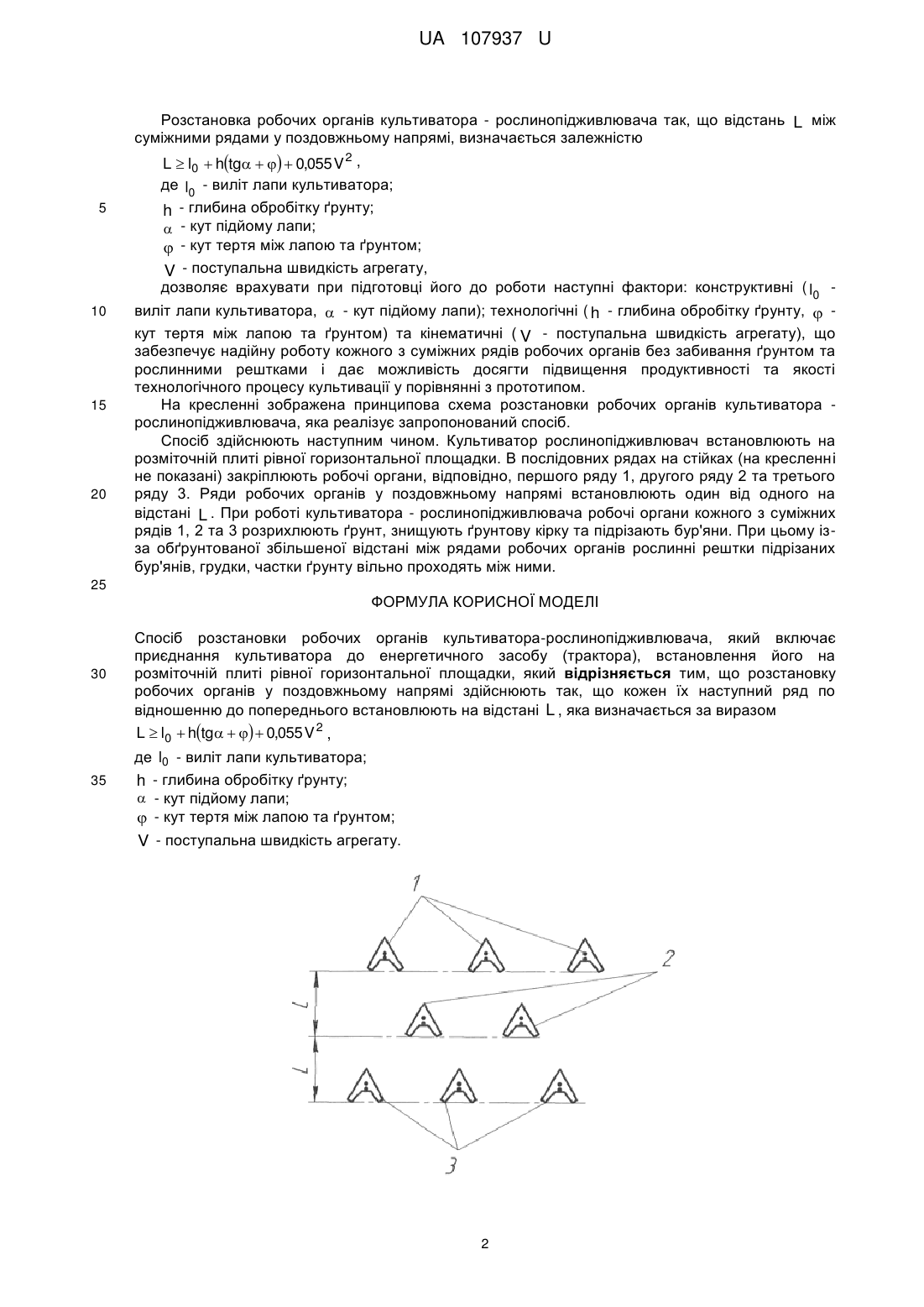
Реферат: Спосіб розстановки робочих органів культиватора-рослинопідживлювача включає приєднання культиватора до енергетичного засобу (трактора) і встановлення його на розміточній плиті рівної горизонтальної площадки. Розстановку робочих органів у поздовжньому напрямі здійснюють так, що кожен їх наступний ряд по відношенню до попереднього встановлюють на відстані L , яка визначається за виразом L l0 htg 0,055 V 2 , де l0 - виліт лапи культиватора; h - глибина обробітку ґрунту; кут підйому лапи; - кут тертя між лапою та ґрунтом; V - поступальна швидкість агрегату. UA 107937 U (54) СПОСІБ РОЗСТАНОВКИ РОБОЧИХ ОРГАНІВ КУЛЬТИВАТОРА-РОСЛИНОПІДЖИВЛЮВАЧА UA 107937 U UA 107937 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до галузі сільського господарства, зокрема до способів та машин для обробітку та розпушування ґрунту, і може бути використана при обробітку міжрядь просапних культур, кущів та виноградників, а також для суцільного обробітку ґрунту. Відомий спосіб розстановки робочих органів культиватора - рослинопідживлювача КРН-5,6 [Культиватор навесной для высокостебельных культур КРН-5,6А. Техническое описание и инструкция по эксплуатации КЛТ 00.000 ТО. - Ростов.: ПО "Красный Аксай", 1988. - 87 с.], що включає приєднання культиватора до енергетичного засобу (трактора), встановлення його на розміточній плиті рівної горизонтальної площадки та розстановку робочих органів у відповідності з прийнятою схемою технологічної операції, причому розстановка робочих органів по довжині гряділя здійснюється так, щоб відстань між їх носками в першому і наступному рядах була максимальною (наскільки дозволяє довжина гряділя). Недоліками та наслідками згаданого способу є недостатня продуктивність на якість технологічного процесу культивації, обумовлені забиванням робочих органів рослинними рештками через недостатню відстань між рядами, що вимагає непередбачуваних технологічних зупинок агрегату для їх очищення. Найбільш близьким та прийнятим за найближчий аналог є спосіб розстановки робочих органів культиватора [Летошнев М.Н. Сельскохозяйственные машины. Теория, расчет, проектирование и испытание: учебное пособие для вузов / М.Н. Летошнев. -3-е изд., перераб. и доп. - М.-Л.: Сельхозгиз, 1955. - 764 с.], що включає приєднання культиватора до енергетичного засобу (трактора), встановлення його на розміточній плиті рівної горизонтальної площадки та розстановку робочих органів, причому розстановка робочих органів у поздовжньому напрямі здійснюється так, що кожен їх наступний ряд по відношенню до попереднього встановлюють у відповідності з залежністю L l0 htg , де l0 - виліт лапи культиватора; h - глибина обробітку ґрунту; - кут підйому лапи; - кут тертя між лапою та ґрунтом. Недоліками способу, прийнятого за найближчий аналог, також є недостатня продуктивність та якість технологічного процесу культивації. Вказані недоліки обумовлені тим, що під час роботи культиватора - рослинопідживлювача його робочий орган, що являє собою плоский клин, створює поперед себе деяку область деформації ґрунту. При розстановці робочих органів в декілька рядів (особливо для суцільного обробітку) ця область охоплює суміжні ряди, що значно погіршує умови підрізання бур'янів. Лапи культиватора забиваються незрізаними стеблами, ґрунтом. Це вимагає несанкціонованої зупинки агрегату та очищення робочих органів. Крім цього запропонована в способі, прийнятому за найближчий аналог, залежність враховує деформацію ґрунту тільки попереду стійки лапи культиватора. В сучасних умовах при роботі на підвищених швидкостях область деформації ґрунту розповсюджується і позад стійки робочого органа, а її величина залежить від робочої швидкості агрегату. Таким чином, при розстановці робочих органів культиватора - рослинопідживлювача мінімальна відстань між їх рядами повинна враховувати і швидкість агрегату. В основу корисної моделі поставлена задача способу розстановки робочих органів культиватора - рослинопідживлювача, в якому при визначенні мінімальної відстані між суміжними рядами робочих органів у поздовжньому напрямі враховується область деформації ґрунту не тільки попереду стійки лапи, а й позаду неї і за рахунок цього досягається підвищення продуктивності та якості технологічного процесу культивації. Поставлена задача вирішується тим, що в способі розстановки робочих органів культиватора - рослинопідживлювача, який включає приєднання культиватора до енергетичного засобу (трактора), встановлення його на розміточній плиті рівної горизонтальної площадки, згідно з корисною моделлю, розстановка робочих органів у поздовжньому напрямі здійснюється так, що кожен їх наступний ряд по відношенню до попереднього встановлюють на відстані L , яка визначається за виразом L l0 htg 0,055 V 2 , де l0 - виліт лапи культиватора; 55 h - глибина обробітку ґрунту; - кут підйому лапи; - кут тертя між лапою та ґрунтом; V - поступальна швидкість агрегату. 1 UA 107937 U Розстановка робочих органів культиватора - рослинопідживлювача так, що відстань L між суміжними рядами у поздовжньому напрямі, визначається залежністю L l0 htg 0,055 V 2 , де l0 - виліт лапи культиватора; 5 10 15 20 h - глибина обробітку ґрунту; - кут підйому лапи; - кут тертя між лапою та ґрунтом; V - поступальна швидкість агрегату, дозволяє врахувати при підготовці його до роботи наступні фактори: конструктивні ( l0 виліт лапи культиватора, - кут підйому лапи); технологічні ( h - глибина обробітку ґрунту, кут тертя між лапою та ґрунтом) та кінематичні ( V - поступальна швидкість агрегату), що забезпечує надійну роботу кожного з суміжних рядів робочих органів без забивання ґрунтом та рослинними рештками і дає можливість досягти підвищення продуктивності та якості технологічного процесу культивації у порівнянні з прототипом. На кресленні зображена принципова схема розстановки робочих органів культиватора рослинопідживлювача, яка реалізує запропонований спосіб. Спосіб здійснюють наступним чином. Культиватор рослинопідживлювач встановлюють на розміточній плиті рівної горизонтальної площадки. В послідовних рядах на стійках (на кресленні не показані) закріплюють робочі органи, відповідно, першого ряду 1, другого ряду 2 та третього ряду 3. Ряди робочих органів у поздовжньому напрямі встановлюють один від одного на відстані L . При роботі культиватора - рослинопідживлювача робочі органи кожного з суміжних рядів 1, 2 та 3 розрихлюють ґрунт, знищують ґрунтову кірку та підрізають бур'яни. При цьому ізза обґрунтованої збільшеної відстані між рядами робочих органів рослинні рештки підрізаних бур'янів, грудки, частки ґрунту вільно проходять між ними. 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 Спосіб розстановки робочих органів культиватора-рослинопідживлювача, який включає приєднання культиватора до енергетичного засобу (трактора), встановлення його на розміточній плиті рівної горизонтальної площадки, який відрізняється тим, що розстановку робочих органів у поздовжньому напрямі здійснюють так, що кожен їх наступний ряд по відношенню до попереднього встановлюють на відстані L , яка визначається за виразом L l0 htg 0,055 V 2 , 35 де l0 - виліт лапи культиватора; h - глибина обробітку ґрунту; - кут підйому лапи; - кут тертя між лапою та ґрунтом; V - поступальна швидкість агрегату. 2 UA 107937 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A01B 35/02, A01B 39/02
Мітки: органів, розстановки, культиватора-рослинопідживлювача, робочих, спосіб
Код посилання
<a href="https://ua.patents.su/5-107937-sposib-rozstanovki-robochikh-organiv-kultivatora-roslinopidzhivlyuvacha.html" target="_blank" rel="follow" title="База патентів України">Спосіб розстановки робочих органів культиватора-рослинопідживлювача</a>
Спосіб налагоджування культиватора-рослинопідживлювача для суцільного обробітку ґрунту
Номер патенту: 107933
Опубліковано: 24.06.2016
Автори: Чаплинський Андрій Петрович, Малюта Сергій Іванович, Надикто Володимир Трохимович
МПК: A01B 39/02, A01B 35/02
Мітки: суцільного, налагоджування, спосіб, ґрунту, обробітку, культиватора-рослинопідживлювача
Формула / Реферат:
Спосіб налагоджування культиватора-рослинопідживлювача для суцільного обробітку ґрунту, що включає приєднання культиватора до енергетичного засобу (трактора), встановлення його на розміточній плиті рівної горизонтальної площадки та розстановку робочих органів секцій, який відрізняється тим, що на рамі культиватора встановлюють зменшену парну кількість секцій, які, в свою чергу, попарно з'єднують поперечними планками з встановленими на них...
Рама секції грунтообробних чи посівних робочих органів
Номер патенту: 65486
Опубліковано: 15.03.2004
Автори: Галич Михайло Васильович, Саченко Володимир Ілліч, Чемер Євген Михайлович, Зирянов Володимир Олексійович
МПК: A01B 35/02
Мітки: органів, рама, секції, посівних, грунтообробних, робочих
Формула / Реферат:
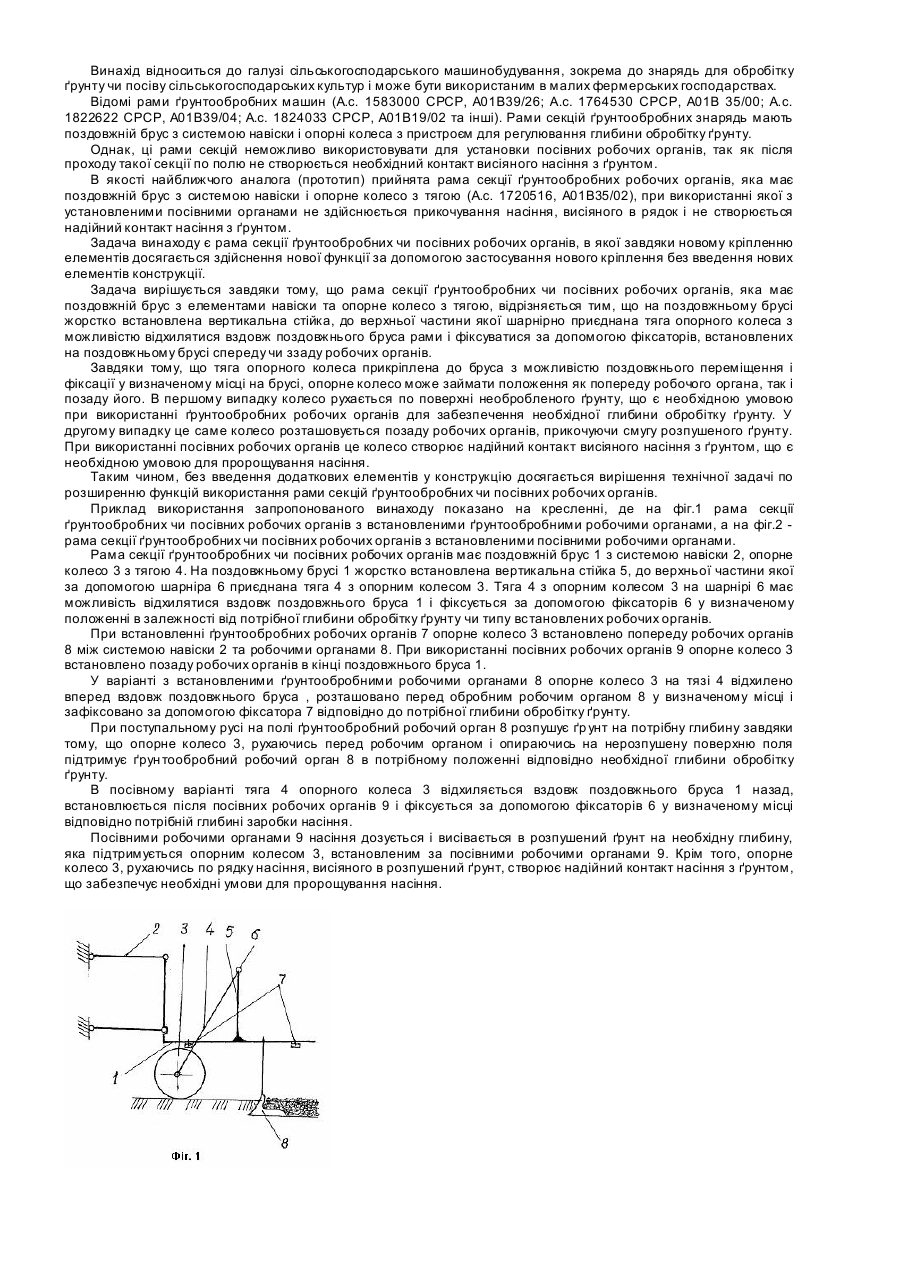
Рама секції ґрунтообробних чи посівних робочих органів, яка має поздовжній брус з системою навіски та опорне колесо з тягою, яка відрізняється тим, що на поздовжньому брусі жорстко встановлена вертикальна стійка, до верхньої частини якої шарнірно приєднана тяга опорного колеса з можливістю відхилятися вздовж поздовжнього бруса рами і фіксуватися за допомогою фіксаторів, встановлених на поздовжньому брусі, попереду чи позаду робочих...
Установка для випробування робочих органів ґрунтообробних машин на зношування
Номер патенту: 35334
Опубліковано: 10.09.2008
Автори: КОТРЕЧКО ОЛЕКСІЙ ОЛЕКСІЙОВИЧ, Похиленко Геннадій Миколайович, Лопатько Костянтин Георгійович, Войтюк Валерій Дмитрович
МПК: G01N 3/56
Мітки: випробування, органів, ґрунтообробних, установка, машин, робочих, зношування
Формула / Реферат:
Установка для випробування робочих органів ґрунтообробних машин на зношування, що містить раму, на якій змонтовані бункер для ґрунту, електродвигун і черв'ячний редуктор, кінематично зв'язаний через муфту з'єднання і підшипниковий вузол з вертикальною опорною стійкою, яка відрізняється тим, що на вертикальній опорній стійці, виконаній з можливістю обертального руху навколо своєї осі, закріплені дві поперечини, на яких встановлені дві лапи...
Робочий орган культиватора
Номер патенту: 11654
Опубліковано: 16.01.2006
Автори: Кунда Андрій Іванович, Малієнко Анатолій Митрофанович
МПК: A01B 35/22
Мітки: орган, культиватора, робочий
Формула / Реферат:
Робочий орган культиватора, що містить стійку, до якої за допомогою заклепок приєднані лівобічні і правобічні плоскорізальні лапи (бритви), що зміщені одна відносно одної за ходом руху, з переднім трикутним заглиблювачем, який відрізняється тим, що в робочому органі культиватора спереду до нижньої грані зміщених плоскорізальних лап за ходом руху приєднаний за допомогою зварювання трикутний заглиблювач, який розташований нижче від лез...
Лапа культиватора
Номер патенту: 24403
Опубліковано: 25.06.2007
Автори: Бабицький Леонід Федорович, Сальніков Віктор Павлович, Тарасенко Володимир Іванович
МПК: A01B 33/00
Мітки: культиватора, лапа
Формула / Реферат:
1. Лапа культиватора, що містить носок, два симетрично розташовані крила з лезами і хвостовик, яка відрізняється тим, що на верхній поверхні носка і крил лапи встановлені вершинами до носка лапи накладки трикутної форми, при цьому вісь центральної накладки збігається з віссю лапи, а осі накладок крил паралельні лініям їхніх лез.2. Лапа культиватора за п. 1, яка відрізняється тим, що вершини накладок крил розташовані на лініях їхніх...
Попередній патент: Спосіб оптимізації інтраопераційної флюоресценції злоякісних пухлин головного мозку
Наступний патент: Культиватор-рослинопідживлювач
Випадковий патент: Низькотемпературний припій