Динамометр
Номер патенту: 110930
Опубліковано: 25.10.2016
Автори: Гончар Наталя Вікторівна, Внуков Юрій Миколайович, Степанов Дмитро Миколайович
Формула / Реферат
Динамометр, який має пружну скобу з паралельними плечима, п'яту, запобіжний пристрій, який відрізняється тим, що товщина нижнього паралельного плеча в три рази більша, ніж верхнього, п'яту виконано П-подібного перерізу і закріплено за допомогою гвинтів, в пазу нижнього паралельного плеча за допомогою гайок встановлено безконтактний індуктивний датчик, сигнали якого фіксуються реєструючим прибором та передаються на електронно-обчислювальну машину (ЕОМ), запобіжний пристрій встановлено на нижньому паралельному плечі поблизу безконтактного індуктивного датчика, і у випадку вимірювання непостійних або періодичних сил додатково містить між верхнім і нижнім плечима буферну прокладку.
Текст
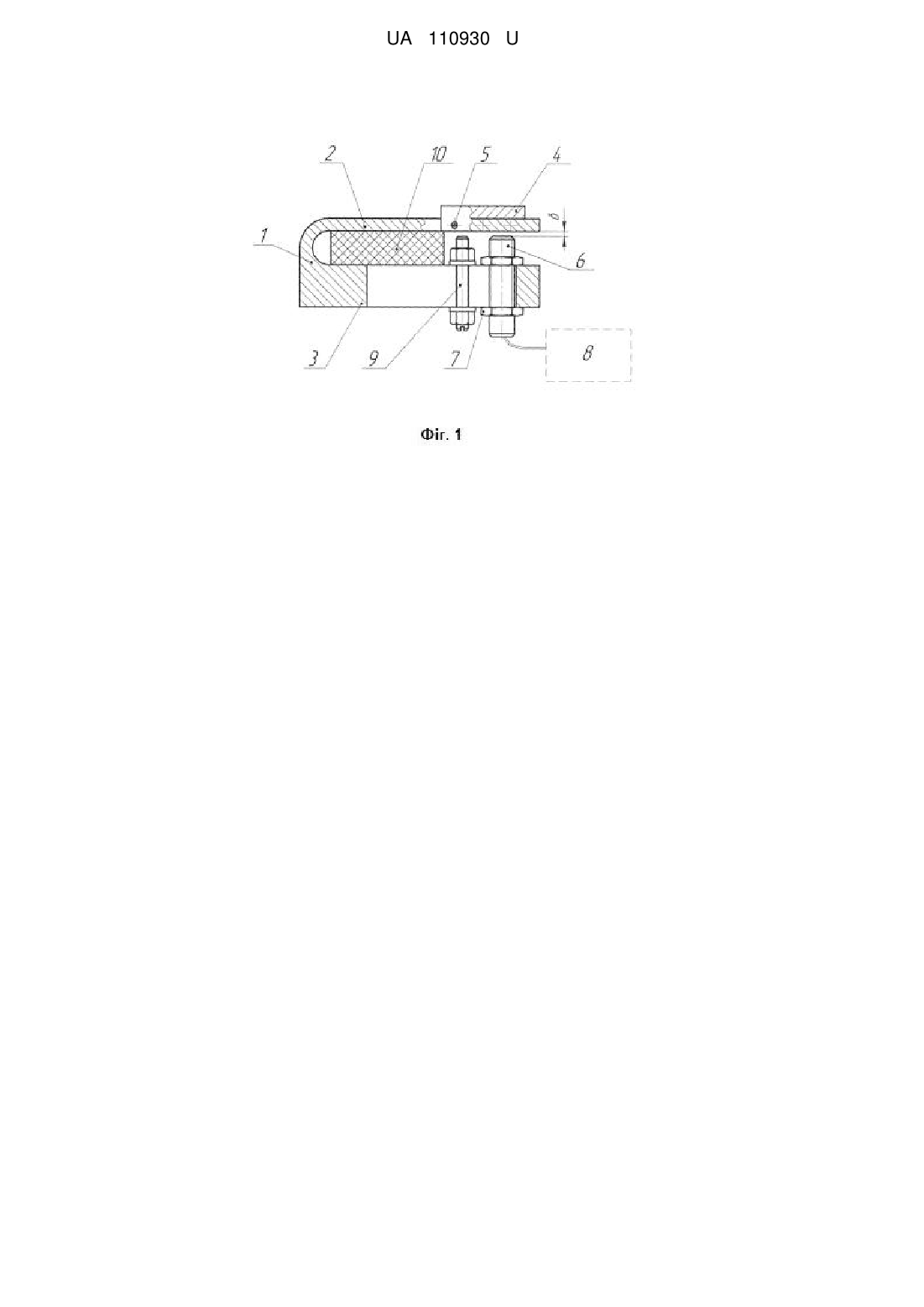
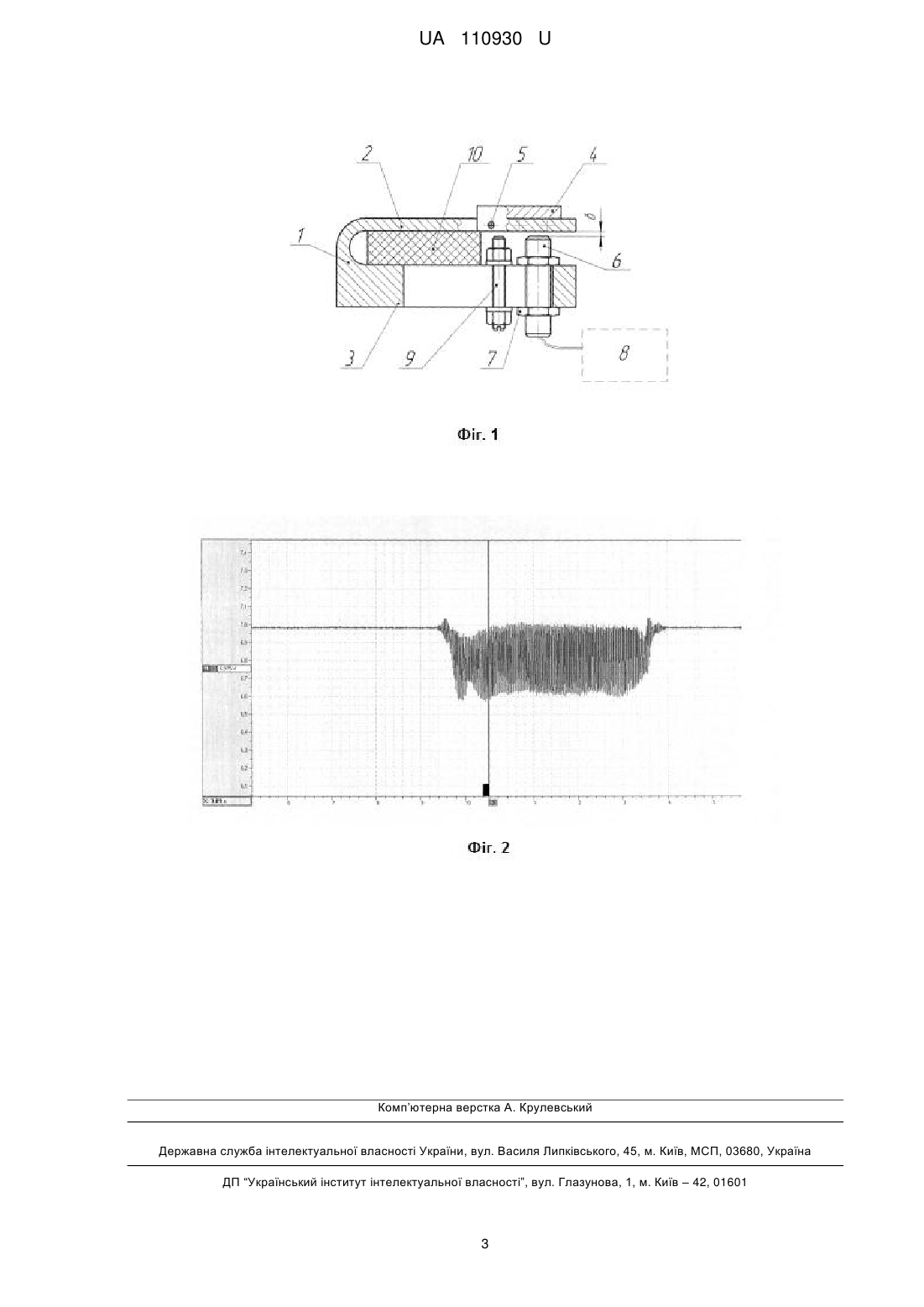
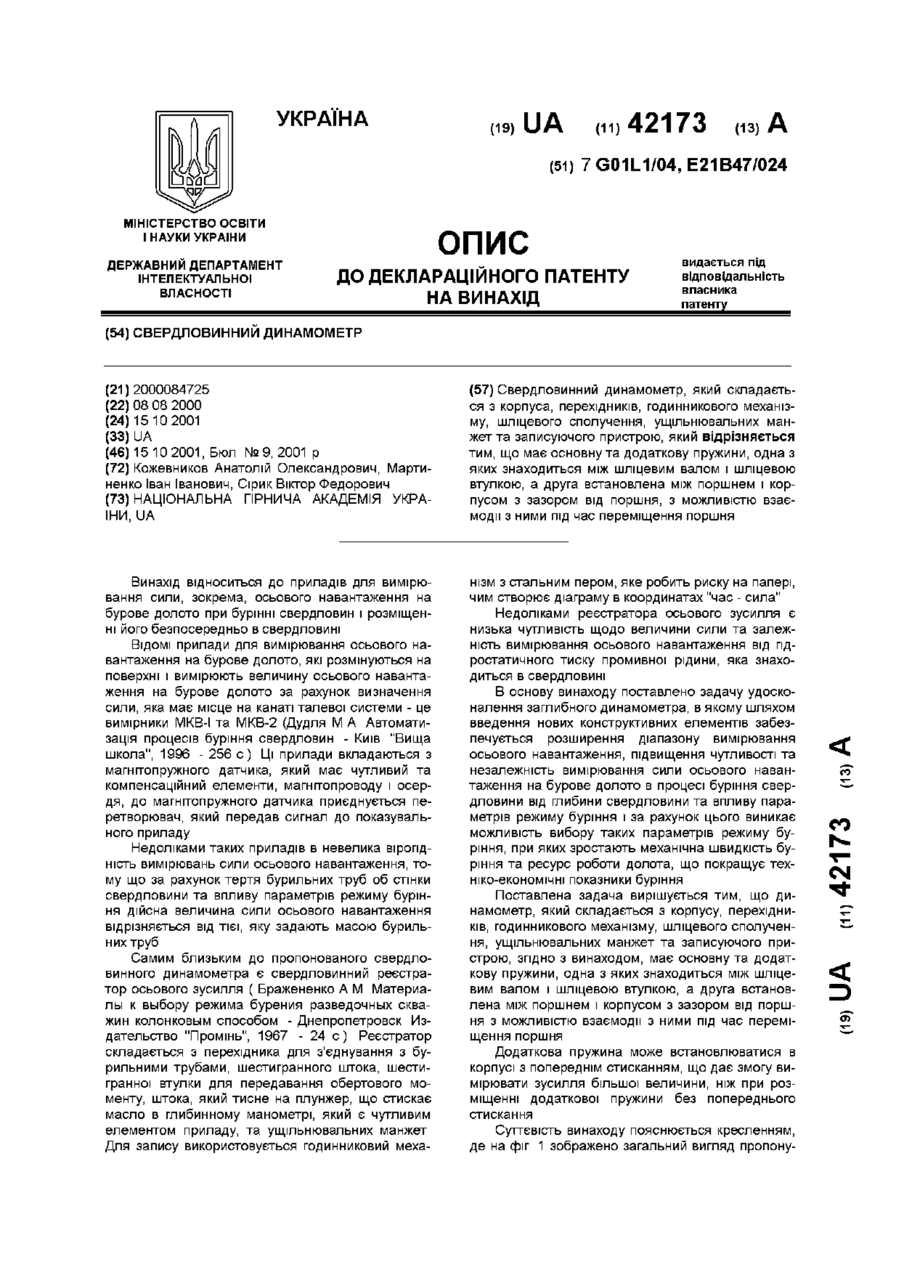
Реферат: Динамометр має пружну скобу з паралельними плечима, п'яту, запобіжний пристрій, причому товщина нижнього паралельного плеча в три рази більша, ніж верхнього, п'яту виконано Пподібного перерізу і закріплено за допомогою гвинтів, в пазу нижнього паралельного плеча за допомогою гайок встановлено безконтактний індуктивний датчик, сигнали якого фіксуються реєструючим прибором та передаються на електронно-обчислювальну машину (ЕОМ), запобіжний пристрій встановлено на нижньому паралельному плечі поблизу безконтактного індуктивного датчика, і у випадку вимірювання непостійних або періодичних сил додатково містить між верхнім і нижнім плечима буферну прокладку. UA 110930 U (12) UA 110930 U UA 110930 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до техніки контролю та вимірювання силових навантажень постійного, непостійного і періодичного характеру і може бути використана для вимірювання, моніторингу, цифрової реєстрації силової дії нежорстких інструментів типу механічних щіток або пелюсткових кругів на поверхню зразка, що оброблюється (принцип дії динамометра полягає у вимірюванні змінення величини зазору 5, що є результатом деформації під дією вимірювальних сил). Відома конструкція динамометра [1], що складається з корпуса у вигляді незамкненої скоби, між плечима якої в циліндричну порожнину встановлено перетворювач зусилля в електричний сигнал, а також силоуловлюючого шару, плоскої підошви, гвинта та силопередаючого вузла (накладок та циліндричної п'яти). Недоліком цього приладу є відсутність можливості змінювати границі вимірювання навантаження. Прототипом вибрана відома конструкція динамометра [2], яка має пружну скобу з паралельними плечима, індикатор деформації скоби з додатковим гальмом, запобіжний пристрій та п'яту, що сприймає навантаження, яка встановлена в пазу верхнього плеча і дає можливість при переміщенні змінювати границі вимірювання навантаження. Під дією сил навантаження на п'яту відбувається пружна деформація скоби, яка передається рейці індикатора. Після зняття навантаження плечі вертаються у початкове положення, і на індикаторі, завдяки гальму, залишається значення максимальної деформації скоби. Недоліком цієї конструкції є недостатня точність виміру, можливість реєстрації тільки максимального значення деформації, неможливість спостереження за динамікою процесу. А також є ймовірність розгойдування плечей пружної скоби, що ще більше знижує точність виміру сил і може призвести до надмірної деформації плечей та руйнуванню приладу. В основу корисної моделі поставлено задачу розробки простого і зручного в використанні приладу - динамометра для визначення сил, від постійних, непостійних і періодичних навантажень, в тому числі розподілених, з підвищеною точністю і надійністю, який дозволяє проводити моніторинг з реєстрацією цих сил в реальному часі та забезпечує широкі можливості подальшої обробки цих результатів, має можливість гасити надмірні коливання скоби в разі їх виникнення. Поставлена задача досягається тим, що запропонований динамометр має пружну скобу з паралельними плечима, п'яту, запобіжний пристрій, причому товщина нижнього паралельного плеча в три рази більша, ніж верхнього, п'яту виконано П-подібного перерізу і закріплено за допомогою гвинтів, в пазу нижнього паралельного плеча за допомогою гайок встановлено безконтактний індуктивний датчик, сигнали якого фіксуються реєструючим приладом та передаються на електронно-обчислювальну машину (ЕОМ), запобіжний пристрій встановлено на нижньому паралельному плечі поблизу безконтактного індуктивного датчика, і у випадку вимірювання непостійних або періодичних сил додатково містить між верхнім і нижнім плечима буферну прокладку. Саме виконання нижнього паралельного плеча більш масивнішим дало можливість забезпечити підвищення надійності конструкції приладу. П-подібна форма перерізу п'яти та її кріплення за допомогою гвинтів дозволяє створити умови для виміру розподіленого навантаження і дає можливість пересування її вздовж верхнього плеча. Запобіжний пристрій закріплюється в пазу нижнього плеча поблизу безконтактного індуктивного датчика, є жорстким обмежувачем, який запобігає надмірній деформації скоби і пошкодженню датчика. Використання безконтактного індуктивного датчика, під'єднаного до реєструючого пристрою, значно збільшує точність вимірювання зазору 5, який є параметром деформації верхнього плеча скоби. Реєструючий прилад, в складі якого є ЕОМ, дає можливість безперервно вимірювати зазор 5, зміна якого є характеристикою деформації верхнього плеча скоби, і перераховувати в зусилля, прикладене до п'яти, зберігати отримані результати і обробляти накопичену інформацію в зручній формі. Буферна прокладка може бути виконана з різних матеріалів - гуми, пароніту тощо; її встановлюють між плечима з метою гасіння динамічної складової коливань і унеможливлення розкачування верхньої скоби у випадку необхідності вимірювання періодичних навантажень. Таким чином, нові ознаки при взаємодії з відомими ознаками забезпечують виявлення нових технічних властивостей шляхом конструкційних удосконалень. Розроблений динамометр із поліпшеними експлуатаційними характеристиками, тобто з підвищеною точністю, надійністю та можливістю накопичення інформації і її обробки за допомогою ЕОМ. Аналоги, які мають ознаки, що відрізняються від прототипу, не знайдені, рішення явним чином не випливає з рівня техніки. 1 UA 110930 U 5 10 15 20 25 30 35 40 45 50 Ідея корисної моделі пояснюється на кресленнях, на фіг. 1 зображено схему динамометра, на фіг. 2 представлено результати визначення зусилля, прикладеного з боку щіткового інструменту обертальної дії на верхню поверхню п'яти. Динамометр має пружну скобу (1) з паралельними плечима (2 та 3). На верхньому плечі (2) за допомогою гвинтів (5) закріплено п'яту (4); в пазу нижнього, більш масивного плеча (3) встановлено безконтактний індуктивний датчик (6), що фіксується двома гайками (7) і під'єднується до реєструючого приладу та ЕОМ (8) для запису результатів, в паз також установлюється запобіжний пристрій (9). При необхідності у випадку вимірювання непостійних сил між плечима встановлюється буферна прокладка (10). Динамометр працює наступним чином. Під дією навантаження на п'яту (4) відбувається деформація верхнього плеча скоби, що визиває зміну величини зазору 8, який вимірюється безконтактним індуктивним датчиком (6). Сигнал передається до реєструючого приладу (8), який представляє собою підсилювач, аналогово-цифровий перетворювач та ЕОМ, з програмним забезпеченням, наприклад, демоверсією «PowerGraph 3.3 Demo», за допомогою якого відбувається запис сигналу в режимі реального часу. Тарирування для визначення сил, діючих на п'яту, проводили за допомогою мір ваги, отримуючи тарирувальну залежність вихідної напруги U від зусилля Р: U=f(P). Запобіжний засіб встановлено для запобігання надмірної деформації скоби, повного вибору зазору 5 і пошкодження датчика. Якщо навантаження надмірно великі, п'яту (4) переміщують, зменшуючи виліт плеча до місця прикладення сили. При вимірюванні непостійних або періодичних навантажень, у випадку надмірного розгойдування верхнього плеча скоби, між плечима встановлюють буферну прокладку (10), яка буде гасити коливання, зменшуючи їх динамічну складову. Запропонований динамометр можна використовувати для вимірювання постійних сил, діючих на п'яту, але особливу цінність він має при вимірюванні зусиль, що змінюються, особливо в короткі проміжки часу. На фіг. 2 показано записаний результат виміру сил обробки щітковим полімерно-абразивним дисковим інструментом обертальної дії на оброблювану поверхню. Невеликий рівень коливань, викликаний наявністю мінімального биття шпинделя і нерівномірним входом полімерно-абразивних волокон в зону контакту, не потребував використання буферної пластини. По графіку (фіг. 2) є можливість простежити за зміною рівня сил при вході інструмента в зону контакту з оброблюваною поверхнею, при основному процесі обробки і при його виході - в режимі реального часу, отримати значення середньої і максимальної сили, що діє з боку інструмента в процесі обробки. Виходячи з вищевикладеного можна зробити висновок, що технічне рішення, яке заявляється, задовольняє критерію «Промислове застосування». Джерела інформації: 3 1. А.С. №769369 СССР, МКИ G01L1/12. Динамометр [Электронный ресурс] / П.П. Сизых, Г.Р. Квашнин, В.Ф Жилицкий, В.Н. Близняков; заяв. 14.12.78; опубл. 07.10.80. - Режим доступа: http://wwwl.fips.ru/fips_servl/fips_servlet. 3 2. А.С. №481800 СССР, МКИ G01L1/04. Динамометр [Электронный ресурс] / Е.С. Артюхов, B.C. Суворов; заяв. 06.06.73; опубл. 25.08.75. - Режим доступа: http://wwwl .fips.ru/fips_servl/fips_servlet. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Динамометр, який має пружну скобу з паралельними плечима, п'яту, запобіжний пристрій, який відрізняється тим, що товщина нижнього паралельного плеча в три рази більша, ніж верхнього, п'яту виконано П-подібного перерізу і закріплено за допомогою гвинтів, в пазу нижнього паралельного плеча за допомогою гайок встановлено безконтактний індуктивний датчик, сигнали якого фіксуються реєструючим прибором та передаються на електроннообчислювальну машину (ЕОМ), запобіжний пристрій встановлено на нижньому паралельному плечі поблизу безконтактного індуктивного датчика, і у випадку вимірювання непостійних або періодичних сил додатково містить між верхнім і нижнім плечима буферну прокладку. 2 UA 110930 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01L 1/04
Мітки: динамометр
Код посилання
<a href="https://ua.patents.su/5-110930-dinamometr.html" target="_blank" rel="follow" title="База патентів України">Динамометр</a>
Тензометричний токарний динамометр

Номер патенту: 84657
Опубліковано: 25.10.2013
Автори: Рудь Віктор Дмитрович, Божко Тетяна Євгеніївна, Савюк Ігор Віталійович, Голодюк Ростислав Павлович, Харчук Павло Мирославович
МПК: B23B 25/00
Мітки: токарний, тензометричний, динамометр
Формула / Реферат:
Тензометричний токарний динамометр, що складається з корпусу та опори, де кріпиться різець, який відрізняється тим, що пристрій має навантажувальний механізм, з'єднаний з корпусом через кульки, які мінімізують тертя при русі цього механізму, що виконаний із можливістю вільно переміщуватись за трьома координатами та з можливістю деформації пластинок, а зняття даних відбувається за рахунок під'єднаних до комп'ютера тензометричних датчиків.
Тензометричний токарний динамометр

Номер патенту: 108125
Опубліковано: 25.03.2015
Автори: Божко Тетяна Євгеніївна, Харчук Павло Мирославович, Голодюк Ростислав Павлович, Рудь Віктор Дмитрович, Савюк Ігор Віталійович
МПК: B23B 25/00, G01L 1/22, G01L 1/04
Мітки: динамометр, токарний, тензометричний
Формула / Реферат:
Тензометричний токарний динамометр, що складається з корпусу та опори, в якій кріпиться різець, який відрізняється тим, що пристрій має навантажувальний механізм, з'єднаний з корпусом через кульки, які мінімізують тертя при русі цього механізму, що виконаний із можливістю вільно переміщуватись за трьома координатами та з можливістю деформації пластинок, на яких напаяні тензометричні датчики, дві з яких прикріплені до стояків, а одна - до...
Свердловинний динамометр
Номер патенту: 42173
Опубліковано: 15.03.2004
Автори: Сірик Віктор Федорович, Мартиненко Іван Іванович, Кожевников Анатолій Олександрович
МПК: E21B 44/00, G01L 1/04
Мітки: динамометр, свердловинний
Формула / Реферат:
Свердловинний динамометр, який складається з корпуса, перехідників, годинникового механізму, шліцевого з'єднання, ущільнювальних манжет та записуючого пристрою, який відрізняється тим, що має основну та додаткову пружини, одна з яких знаходиться між шліцевим валом і шліцевою втулкою, а друга встановлена між поршнем і корпусом з зазором від поршня, з можливістю взаємодії з ними під час переміщення поршня.
Динамометр для ударно-статичних випробувань
Номер патенту: 86331
Опубліковано: 25.12.2013
Автори: Литвинський Гаррі Григорович, Касьянов Володимир Олексійович
МПК: G01L 1/06
Мітки: динамометр, випробувань, ударно-статичних
Формула / Реферат:
Динамометр для ударно-статичних випробувань, що складається з корпуса, мірного дроту, пуансона і індентора, який відрізняється тим, що він оснащений двома циліндричними пунсонами, закріпленими паралельно один до одного на співвісних втулках, встановлених у корпусі, що обладнаний отворами для розміщення мірного дроту між пуансонами.
Динамометр
Номер патенту: 42276
Опубліковано: 25.06.2009
Автори: Рибак Тимофій Іванович, Паламарчук Петро Васильович, Бабій Андрій Васильович, Матвіїшин Анатолій Йосипович
Мітки: динамометр
Формула / Реферат:
Динамометр, що складається з двох елементів кріплення, двох тензометричних елементів та напрямних елементів, який відрізняється тим, що елементи кріплення виконані співвісно в одній площині з можливістю переміщення один відносно одного через тензометричні елементи, що до них шарнірно приєднанні, в області, утвореній напрямними елементами у вигляді паралельних плит, які з'єднані між собою пальцями з шарнірами та жорстко закріплені на одному з...
Попередній патент: Спосіб оцінки рівня регіонально-екологічного ризику диспластикозалежної патології бронхолегеневої системи у дитячому віці
Наступний патент: Спосіб діагностики розвитку остеопорозу
Випадковий патент: Прес поверховий колонного типу