Індукційно-динамічний привод з зворотним зв’язком

Формула / Реферат
Індукційно-динамічний привод з зворотним зв'язком, який містить рухомий якір, виконаний у вигляді короткозамкненої котушки, нерухому котушку індуктора, яка отримує живлення у вигляді прямокутних імпульсів, який відрізняється тим, що в коло збудження котушки індуктора ввімкнений датчик струму, вихід якого підключений до входу регульованого підсилювача, вихід якого підключений до першого входу суматора, до другого входу суматора підключене джерело прямокутних імпульсів, а вихід суматора підключений до котушки індуктора.
Текст
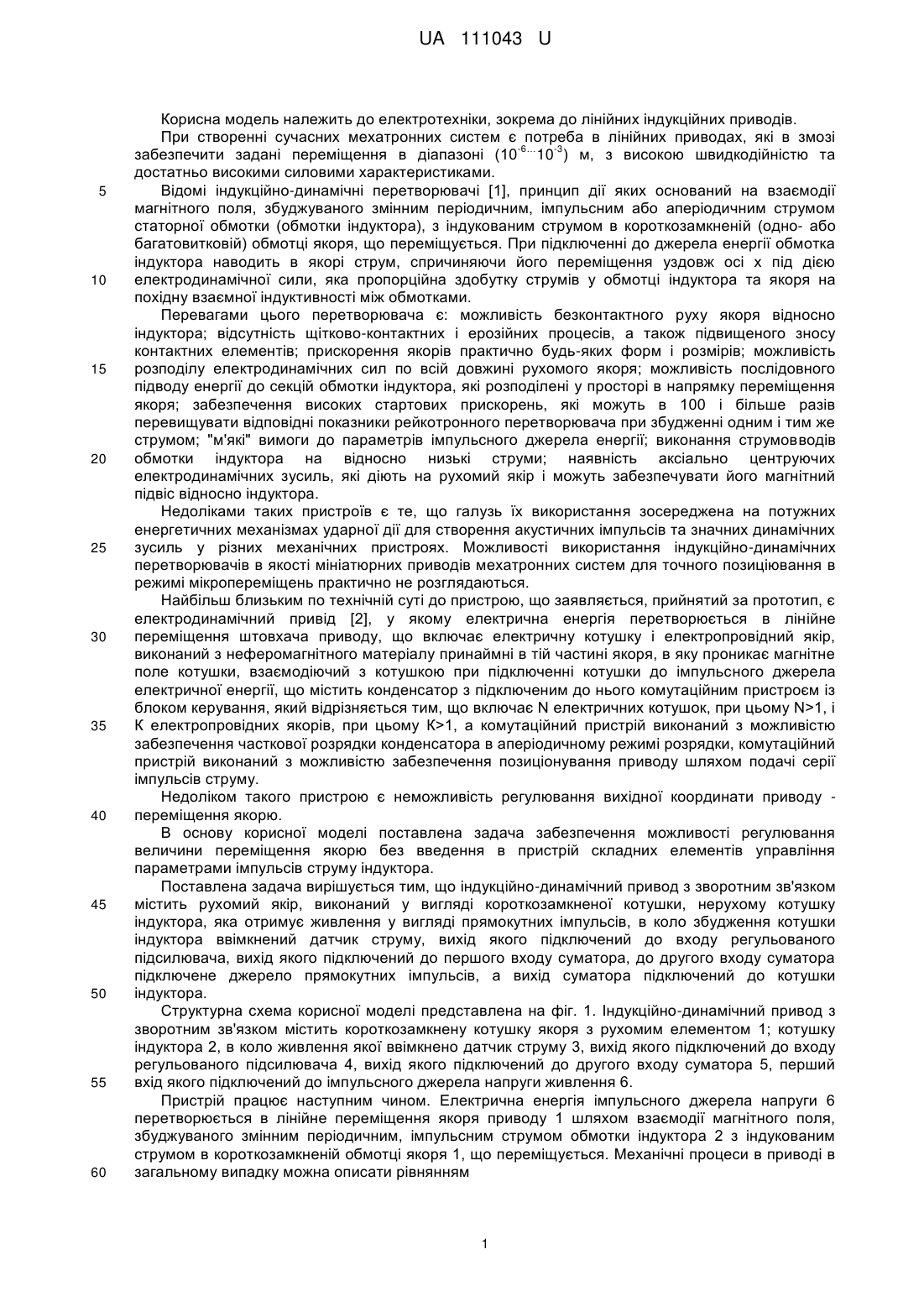
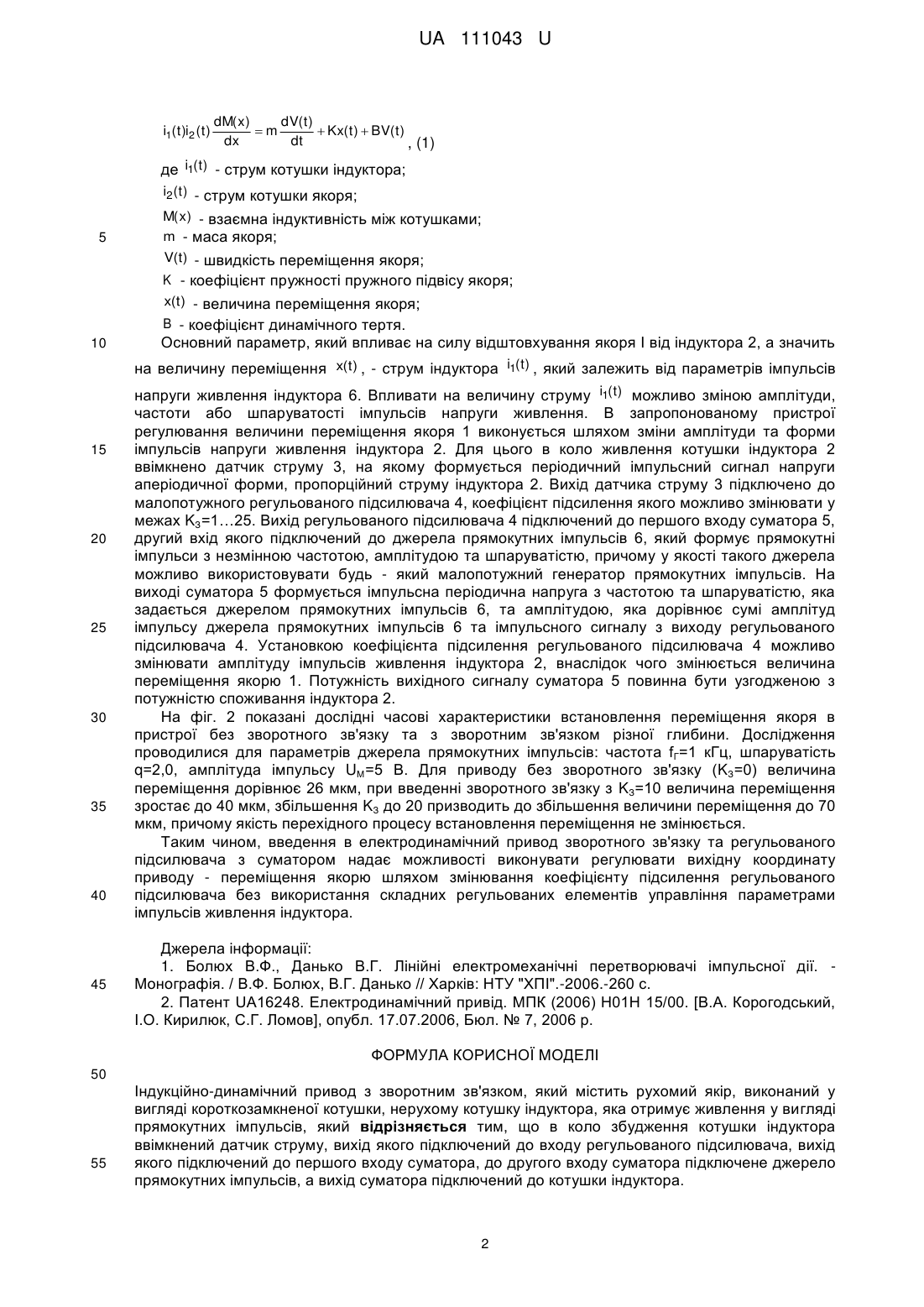
Реферат: UA 111043 U UA 111043 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до електротехніки, зокрема до лінійних індукційних приводів. При створенні сучасних мехатронних систем є потреба в лінійних приводах, які в змозі -6… -3 забезпечити задані переміщення в діапазоні (10 10 ) м, з високою швидкодійністю та достатньо високими силовими характеристиками. Відомі індукційно-динамічні перетворювачі [1], принцип дії яких оснований на взаємодії магнітного поля, збуджуваного змінним періодичним, імпульсним або аперіодичним струмом статорної обмотки (обмотки індуктора), з індукованим струмом в короткозамкненій (одно- або багатовитковій) обмотці якоря, що переміщується. При підключенні до джерела енергії обмотка індуктора наводить в якорі струм, спричиняючи його переміщення уздовж осі х під дією електродинамічної сили, яка пропорційна здобутку струмів у обмотці індуктора та якоря на похідну взаємної індуктивності між обмотками. Перевагами цього перетворювача є: можливість безконтактного руху якоря відносно індуктора; відсутність щітково-контактних і ерозійних процесів, а також підвищеного зносу контактних елементів; прискорення якорів практично будь-яких форм і розмірів; можливість розподілу електродинамічних сил по всій довжині рухомого якоря; можливість послідовного підводу енергії до секцій обмотки індуктора, які розподілені у просторі в напрямку переміщення якоря; забезпечення високих стартових прискорень, які можуть в 100 і більше разів перевищувати відповідні показники рейкотронного перетворювача при збудженні одним і тим же струмом; "м'які" вимоги до параметрів імпульсного джерела енергії; виконання струмовводів обмотки індуктора на відносно низькі струми; наявність аксіально центруючих електродинамічних зусиль, які діють на рухомий якір і можуть забезпечувати його магнітний підвіс відносно індуктора. Недоліками таких пристроїв є те, що галузь їх використання зосереджена на потужних енергетичних механізмах ударної дії для створення акустичних імпульсів та значних динамічних зусиль у різних механічних пристроях. Можливості використання індукційно-динамічних перетворювачів в якості мініатюрних приводів мехатронних систем для точного позиціювання в режимі мікропереміщень практично не розглядаються. Найбільш близьким по технічній суті до пристрою, що заявляється, прийнятий за прототип, є електродинамічний привід [2], у якому електрична енергія перетворюється в лінійне переміщення штовхача приводу, що включає електричну котушку і електропровідний якір, виконаний з неферомагнітного матеріалу принаймні в тій частині якоря, в яку проникає магнітне поле котушки, взаємодіючий з котушкою при підключенні котушки до імпульсного джерела електричної енергії, що містить конденсатор з підключеним до нього комутаційним пристроєм із блоком керування, який відрізняється тим, що включає N електричних котушок, при цьому N>1, і К електропровідних якорів, при цьому К>1, а комутаційний пристрій виконаний з можливістю забезпечення часткової розрядки конденсатора в аперіодичному режимі розрядки, комутаційний пристрій виконаний з можливістю забезпечення позиціонування приводу шляхом подачі серії імпульсів струму. Недоліком такого пристрою є неможливість регулювання вихідної координати приводу переміщення якорю. В основу корисної моделі поставлена задача забезпечення можливості регулювання величини переміщення якорю без введення в пристрій складних елементів управління параметрами імпульсів струму індуктора. Поставлена задача вирішується тим, що індукційно-динамічний привод з зворотним зв'язком містить рухомий якір, виконаний у вигляді короткозамкненої котушки, нерухому котушку індуктора, яка отримує живлення у вигляді прямокутних імпульсів, в коло збудження котушки індуктора ввімкнений датчик струму, вихід якого підключений до входу регульованого підсилювача, вихід якого підключений до першого входу суматора, до другого входу суматора підключене джерело прямокутних імпульсів, а вихід суматора підключений до котушки індуктора. Структурна схема корисної моделі представлена на фіг. 1. Індукційно-динамічний привод з зворотним зв'язком містить короткозамкнену котушку якоря з рухомим елементом 1; котушку індуктора 2, в коло живлення якої ввімкнено датчик струму 3, вихід якого підключений до входу регульованого підсилювача 4, вихід якого підключений до другого входу суматора 5, перший вхід якого підключений до імпульсного джерела напруги живлення 6. Пристрій працює наступним чином. Електрична енергія імпульсного джерела напруги 6 перетворюється в лінійне переміщення якоря приводу 1 шляхом взаємодії магнітного поля, збуджуваного змінним періодичним, імпульсним струмом обмотки індуктора 2 з індукованим струмом в короткозамкненій обмотці якоря 1, що переміщується. Механічні процеси в приводі в загальному випадку можна описати рівнянням 1 UA 111043 U i1( t )i2 ( t ) dM( x ) dV( t ) m Kx( t ) BV( t ) dx dt , (1) де i1(t ) - струм котушки індуктора; 5 i2 (t ) - струм котушки якоря; M( x) - взаємна індуктивність між котушками; m - маса якоря; V(t) - швидкість переміщення якоря; K - коефіцієнт пружності пружного підвісу якоря; x(t) - величина переміщення якоря; B - коефіцієнт динамічного тертя. 10 Основний параметр, який впливає на силу відштовхування якоря І від індуктора 2, а значить на величину переміщення x(t) , - струм індуктора i1(t ) , який залежить від параметрів імпульсів 15 20 25 30 35 40 45 напруги живлення індуктора 6. Впливати на величину струму i1(t ) можливо зміною амплітуди, частоти або шпаруватості імпульсів напруги живлення. В запропонованому пристрої регулювання величини переміщення якоря 1 виконується шляхом зміни амплітуди та форми імпульсів напруги живлення індуктора 2. Для цього в коло живлення котушки індуктора 2 ввімкнено датчик струму 3, на якому формується періодичний імпульсний сигнал напруги аперіодичної форми, пропорційний струму індуктора 2. Вихід датчика струму 3 підключено до малопотужного регульованого підсилювача 4, коефіцієнт підсилення якого можливо змінювати у межах KЗ=1…25. Вихід регульованого підсилювача 4 підключений до першого входу суматора 5, другий вхід якого підключений до джерела прямокутних імпульсів 6, який формує прямокутні імпульси з незмінною частотою, амплітудою та шпаруватістю, причому у якості такого джерела можливо використовувати будь - який малопотужний генератор прямокутних імпульсів. На виході суматора 5 формується імпульсна періодична напруга з частотою та шпаруватістю, яка задається джерелом прямокутних імпульсів 6, та амплітудою, яка дорівнює сумі амплітуд імпульсу джерела прямокутних імпульсів 6 та імпульсного сигналу з виходу регульованого підсилювача 4. Установкою коефіцієнта підсилення регульованого підсилювача 4 можливо змінювати амплітуду імпульсів живлення індуктора 2, внаслідок чого змінюється величина переміщення якорю 1. Потужність вихідного сигналу суматора 5 повинна бути узгодженою з потужністю споживання індуктора 2. На фіг. 2 показані дослідні часові характеристики встановлення переміщення якоря в пристрої без зворотного зв'язку та з зворотним зв'язком різної глибини. Дослідження проводилися для параметрів джерела прямокутних імпульсів: частота fГ=1 кГц, шпаруватість q=2,0, амплітуда імпульсу UМ=5 В. Для приводу без зворотного зв'язку (KЗ=0) величина переміщення дорівнює 26 мкм, при введенні зворотного зв'язку з KЗ=10 величина переміщення зростає до 40 мкм, збільшення KЗ до 20 призводить до збільшення величини переміщення до 70 мкм, причому якість перехідного процесу встановлення переміщення не змінюється. Таким чином, введення в електродинамічний привод зворотного зв'язку та регульованого підсилювача з суматором надає можливості виконувати регулювати вихідну координату приводу - переміщення якорю шляхом змінювання коефіцієнту підсилення регульованого підсилювача без використання складних регульованих елементів управління параметрами імпульсів живлення індуктора. Джерела інформації: 1. Болюх В.Ф., Данько В.Г. Лінійні електромеханічні перетворювачі імпульсної дії. Монографія. / В.Ф. Болюх, В.Г. Данько // Харків: НТУ "ХПІ".-2006.-260 с. 2. Патент UA16248. Електродинамічний привід. МПК (2006) Н01Н 15/00. [В.А. Корогодський, І.О. Кирилюк, С.Г. Ломов], опубл. 17.07.2006, Бюл. № 7, 2006 р. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Індукційно-динамічний привод з зворотним зв'язком, який містить рухомий якір, виконаний у вигляді короткозамкненої котушки, нерухому котушку індуктора, яка отримує живлення у вигляді прямокутних імпульсів, який відрізняється тим, що в коло збудження котушки індуктора ввімкнений датчик струму, вихід якого підключений до входу регульованого підсилювача, вихід якого підключений до першого входу суматора, до другого входу суматора підключене джерело прямокутних імпульсів, а вихід суматора підключений до котушки індуктора. 2 UA 111043 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02K 41/02
Мітки: привод, зв'язком, індукційно-динамічний, зворотним
Код посилання
<a href="https://ua.patents.su/5-111043-indukcijjno-dinamichnijj-privod-z-zvorotnim-zvyazkom.html" target="_blank" rel="follow" title="База патентів України">Індукційно-динамічний привод з зворотним зв’язком</a>
Індукційно- динамічний привод швидкодіючих комутаційних апаратів
Номер патенту: 21902
Опубліковано: 30.04.1998
Автор: Могилевський Геннадій Вікторович
МПК: H01H 83/00, H01H 71/12
Мітки: динамічний, індукційної, комутаційних, швидкодіючих, привод, апаратів
Формула / Реферат:
Индукционно-динамический привод быстродействующих коммутационных аппаратов, содержащий катушку и короткозамкнутый виток, расположенные соосно в пазах магнитопровода, якорь, выполненный из стали и жестко связанный с короткозамкнутым витком и штоком, воздействующим на контактную систему аппарата, отличающийся тем, что магнитопровод выполнен в виде Ш-образной шихтованной системы с соотношением длины паза к расстоянию между серединами пазов...
Швидкодіючий індукційно-динамічний привід
Номер патенту: 63515
Опубліковано: 15.01.2004
Автори: Попов Олег Якович, Лакс Вячеслав Костянтінович, Богуцкий Володимир Борисович, Пінская Ірина Володимирівна, Яуфман Анатолій Іванович
Мітки: привід, швидкодіючий, індукційно-динамічний
Формула / Реферат:
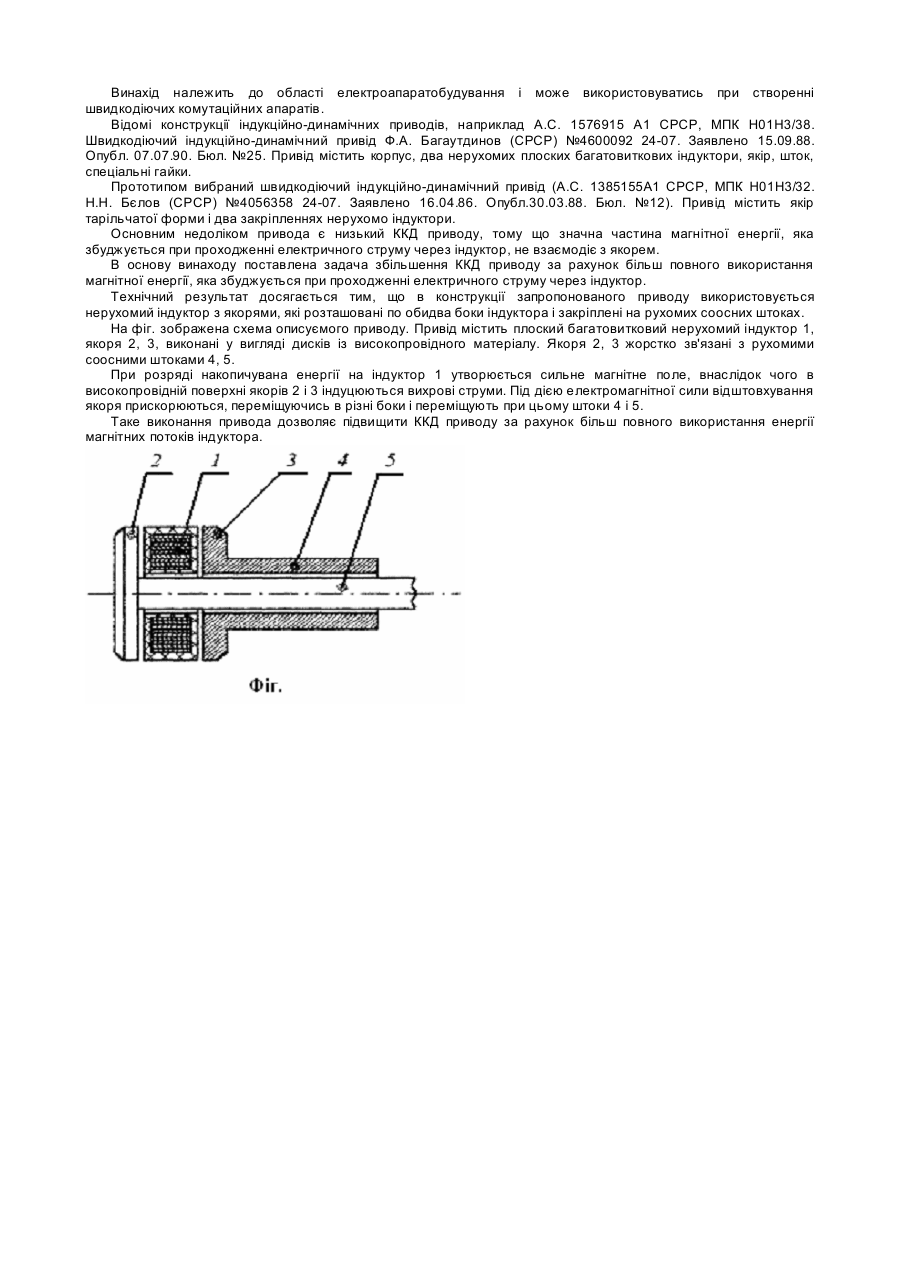
Швидкодіючий індукційно-динамічний привід, який містить плоский багатовитковий індуктор і якорі, виконані у вигляді дисків із високопровідного матеріалу, який відрізняється тим, що якорі розташовані по обидва боки індуктора.
Індукційно-динамічний технологічний пристрій

Номер патенту: 62623
Опубліковано: 15.12.2003
Автори: Марков Олександр Михайлович, Щукін Ігор Сергійович, Болюх Володимир Федорович, Лучук Володимир Феодосійович
МПК: B65G 65/40, B06B 1/02
Мітки: пристрій, технологічний, індукційно-динамічний
Формула / Реферат:
1. Індукційно-динамічний технологічний пристрій, який містить індуктор, виконаний у вигляді дискової обмотки збудження з діелектричним корпусом, яка підключається до джерела імпульсного струму, і розташований між індуктором і поверхнею обладнання, що очищується, якір, виконаний із електропровідного матеріалу у вигляді плоского диска з внутрішньою обичайкою, розташованою всередині обмотки індуктора так, що зовнішня бокова поверхня обичайки...
Індукційно-динамічний електродвигун
Номер патенту: 40337
Опубліковано: 16.07.2001
Автори: Болюх Володимир Федорович, Любимова Лариса Олександрівна
МПК: H02K 33/00, H02K 41/025
Мітки: індукційно-динамічний, електродвигун
Формула / Реферат:
1. Індукційно-динамічний електродвигун, який містить джерело імпульсного живлення, нерухомо закріплену обмотку збудження та рухомий електропровідний якір із ізоляційним проміжком, що проходить від однієї до іншої торцевої поверхні якоря, причому обмотка збудження та електропровідний якір виконані у формі дисків, що встановлені на одній осі один навпроти одного, який відрізняється тим, що ізоляційний проміжок якоря із контактними...
Індукційно-динамічний електродвигун

Номер патенту: 62433
Опубліковано: 15.12.2003
Автор: Любимова Лариса Олександрівна
МПК: H02K 33/00, H02K 41/025
Мітки: електродвигун, індукційно-динамічний
Формула / Реферат:
1. Індукційно-динамічний електродвигун, що містить джерело імпульсного живлення, багатовиткову обмотку збудження з паралельними торцевими сторонами, яка з однієї торцевої сторони закріплена до масивного упора, а з другої торцевої сторони обмотки збудження коаксіально розташований рухомий суцільний електропровідний якір, який з'єднаний з неелектричним виконавчим елементом, причому форма зверненої у бік руху торцевої поверхні обмотки збудження...
Попередній патент: Дискове гальмо нормально замкненого типу
Наступний патент: Автоматична пральна машина барабанного типу
Випадковий патент: Спосіб оцінки стану організму після хірургічної операції