Спосіб контролю руху кінцівок людини
Номер патенту: 112592
Опубліковано: 26.12.2016
Автори: Дашковська Тетяна Русланівна, Клочко Тетяна Реджинальдівна, Скицюк Володимир Іванович, Коваленко Юлія Анатоліївна

Формула / Реферат
Спосіб контролю руху кінцівок людини, в якому здійснюють реєстрацію сигналів від об'єкта, аналізують визначені сегменти електричних сигналів, встановлюють зв'язки між змінами електричних сигналів та наявністю порушення траєкторій руху, який відрізняється тим, що задають траєкторію руху кінцівки, створюють стабільне за своєю конфігурацією та напруженістю електромагнітне поле для вводу в нього пальців кінцівок, реєструють інформаційний сигнал, що визначає векторну діаграму відхилення руху пальців від заданої траєкторії, на підставі якої діагностують зміни динамічних характеристик руху.
Текст
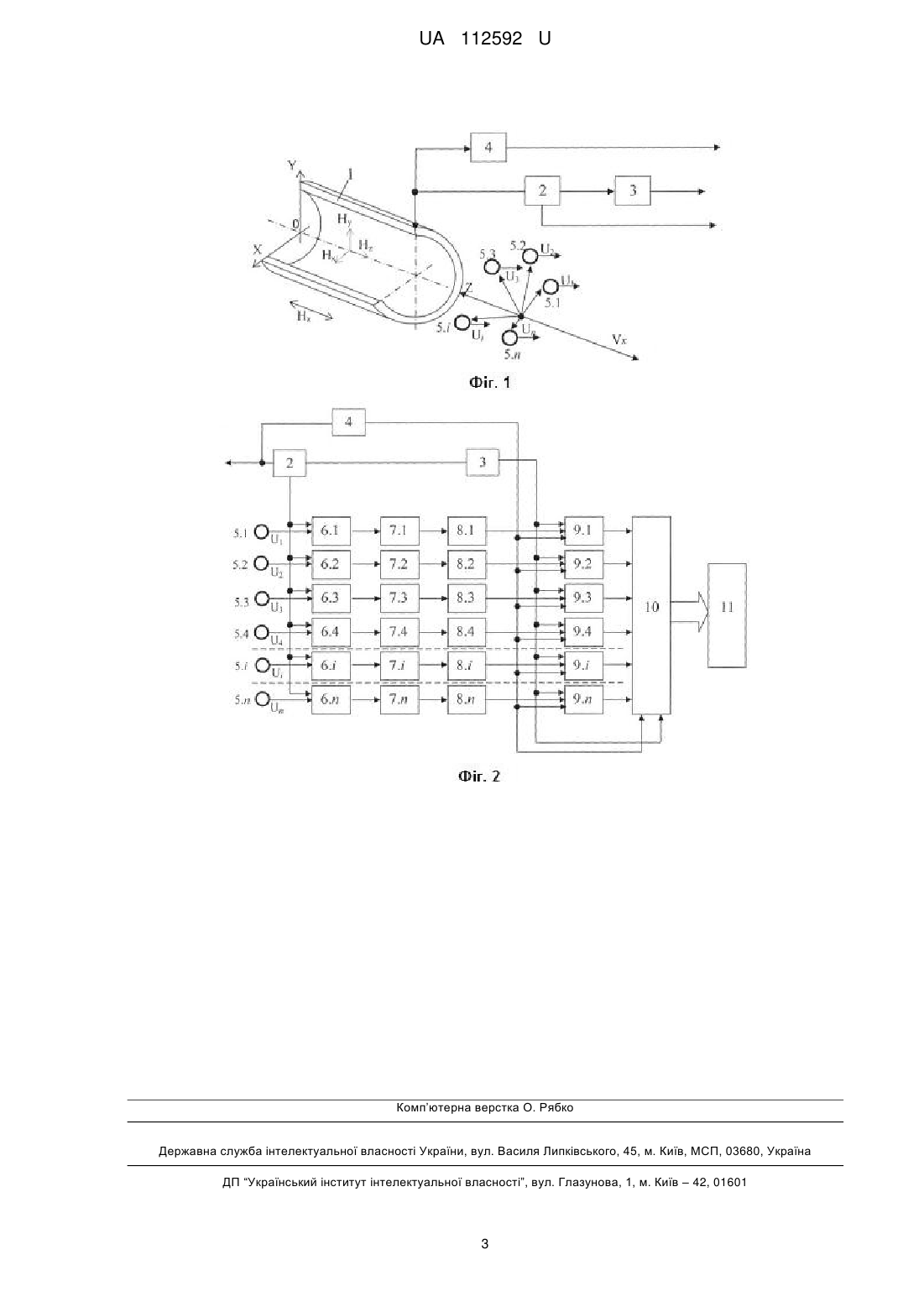
Реферат: Спосіб контролю руху кінцівок людини, в якому здійснюють реєстрацію сигналів від об'єкта, аналізують визначені сегменти електричних сигналів, встановлюють зв'язки між змінами електричних сигналів та наявністю порушення траєкторій руху. Задають траєкторію руху кінцівки, створюють стабільне за своєю конфігурацією та напруженістю електромагнітне поле для вводу в нього пальців кінцівок, реєструють інформаційний сигнал, що визначає векторну діаграму відхилення руху пальців від заданої траєкторії, на підставі якої діагностують зміни динамічних характеристик руху. UA 112592 U (54) СПОСІБ КОНТРОЛЮ РУХУ КІНЦІВОК ЛЮДИНИ UA 112592 U UA 112592 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель, що пропонується, стосується галузі створення приладів для неінвазивного вимірювання та оцінювання стану людини, може бути використана в таких сферах, як медична діагностика, фізіологія. Призначено для застосування у стаціонарних, амбулаторних умовах при доклінічній діагностиці порушення нормального руху кінцівок внаслідок наявності захворювання. Відомий спосіб контролю руху кінцівок людини (див. патент РФ № 2483672, МПК (2013.01) А61В5/0476, опубл. 10.06.2013), згідно з яким за параметрами електроенцефалограми, яку реєструють при різних функціональних станах пацієнта, з використанням сенсомоторної проби визначають індивідуальний профіль латеральної організації, в тому числі оцінюють характер моторних асиметрій з амплітудно-частотним аналізом коефіцієнтів асиметрії. Недоліками цього способу є невисока точність визначення порушень руху кінцівок внаслідок застосування сенсомоторної проби, що не завжди дозволяє достовірно аналізувати траєкторію руху кінцівок. Відомий спосіб контролю руху кінцівок людини (див. патент РФ № 2332160, МПК (2008.01) А61В5/04, опубл. 27.08.2008), згідно з яким здійснюють спектральний аналіз електроенцефалограми методом неперервного вейвлет-перетворення, яке визначають як часову розгортку спектра, залежного від фізіологічно значних діапазонів частот, що дозволяє отримувати локалізовану в часі динамічну енергетичну інформацію. Недоліками цього способу є невисока достовірність визначення наявності захворювання пацієнта, оскільки аналіз скейлограм може надавати інформацію лише в обраних діапазонах частот без урахування інших діапазонів частот, що може призводити до втрати інформації щодо стану пацієнта. Найбільш близьким аналогом до запропонованої корисної моделі за сукупністю ознак є відомий спосіб контролю руху кінцівок людини (див. патент РФ № 2484766, МПК (2013.01) А61В5/0476, опубл. 20.06.2013 p., згідно з яким здійснюють також реєстрацію електроенцефалограми у визначеному частотному діапазоні, обраховують вейвлет спектрограми електроенцефалограми, визначають частотні діапазони ведучих ритмів електричної активності мозку, діагностують захворювання пацієнта за у ширенням діапазону частот піків або визначенням асиметрії між півкулями мозку. Недоліками цього способу є також невисока достовірність визначення порушення руху кінцівок пацієнта внаслідок аналізу лише визначених частотних діапазонів електроенцефалограми мозку, при цьому також може бути втрачена інформація в інших частотних діапазонах, що призводить до недостовірності діагностики захворювання. В основу корисної моделі поставлено задачу створити такий спосіб контролю руху кінцівок людини, за яким шляхом визначення параметрів електромагнітного поля, яке реєструють від кінцівок пацієнта, отримання інтегральної характеристики корисного сигналу, виокремлення та аналізу сталої та динамічної частин сигналу, досягають підвищення точності аналізу векторної діаграми руху визначеного елемента поля, за яким визначають траєкторію руху. Поставлена задача вирішується тим, що в способі контролю руху кінцівок людини, в якому здійснюють реєстрацію сигналів від об'єкта, аналізують визначені сегменти електричних сигналів, встановлюють зв'язки між змінами електричних сигналів та наявністю порушення траєкторій руху, згідно з пропонованою корисною моделлю, задають траєкторію руху кінцівки, створюють стабільне за своєю конфігурацією та напруженістю електромагнітне поле для вводу в нього пальців кінцівок, реєструють інформаційний сигнал, що визначає векторну діаграму відхилення руху пальців від заданої траєкторії, на підставі якої діагностують зміни динамічних характеристик руху. Підвищення точності контролю руху кінцівок людини досягають тим, що завдяки реєстрації та аналізу характеристик електромагнітного поля, що створюють навколо кінцівок, виокремлюють сталу та динамічну складові інформаційного сигналу, контролюють в часі динаміку векторної діаграми відхилень траєкторії руху кінцівок та діагностують порушення траєкторії за наявності захворювання. Спосіб контролю руху кінцівок людини полягає у наступному. Для того, щоб виконати високоякісний контроль патологій біологічного об'єкту, необхідним є контроль виконання руху за попередньо заданою траєкторією. Для того, щоб виконати подібну задачу, необхідно створити відповідні умови роботи відчутників ЕМП щодо визначення координати простору. Оскільки зовнішні поля є досить складними з огляду на параметри їх завдання, то для цього використовуємо соленоїд як найбільш простий пристрій утворення стабільного за своєю конфігурацією та напруженістю електромагнітного поля. У цьому випадку будь-який відчутник електромагнітного поля, занесений в середину соленоїда, створює електричний сигнал, пропорційний відстані від центральної осі. 1 UA 112592 U 5 10 15 20 25 30 35 Таким чином, ми отримуємо векторну діаграму розташування кожного з окремих елементів відносно осі соленоїда. Інформацію про цей рух запам'ятовують відповідним блоком обробки інформаційного сигналу. При кожному наступному відвідуванні лікаря інформацію про траєкторію руху кінцівки людини знов записують та проводять порівняльний аналіз з попередніми результатами, тобто відстежують динаміку розвитку захворювання. На підставі цих досліджень здійснюють діагностику руху кінцівок людини та наявності захворювання. Суть корисної моделі пояснюється кресленнями, на яких зображено: на Фіг. 1 - схема комплексу відчутників електромагнітного поля, на Фіг. 2 - блок-схема обробки інформаційних сигналів відчутників, де: 1 - соленоїд, 2 - генератор поля, 3 - опорний генератор, 4 - формувач імпульсів, 5.1, 5.2,…, 5.5 - відчутники електромагнітного поля, 6.1, 6.2,…, 6.5 - пристрої підналагодження, 7.1, 7.2,…, 7.5 - лінійні підсилювачі, 8.1, 8.2,…, 8.5 - інтегратори, 9.1, 9.2,…, 9.5 - аналогово-цифрові перетворювачі, 10 - колектор (інтерфейс), 11 - комп'ютер (блок обробки інформації). Спосіб реалізують наступним чином. На кожний палець руки та на визначені м'язові фрагменти руки встановлюють відчутники 5.1, 5.2,…, 5.і, 5.n електромагнітного поля (ЕМП), кожний з яких з'єднаний із відповідним пристроєм 6.1, 6.2,…, 6.і, 6.n підналагодження схеми обробки інформаційного сигналу. Після цього руку (кінцівку) розміщують у середині соленоїда 1. Соленоїд 1 створює у середині відповідне електромагнітне поле під дією генератора 2 поля, який для цього використовує високостабільний генератор 3 опорної частоти. З виходу генератора 2 поля сигнал надходить до входу формувача 4 імпульсів, який обслуговує роботу АЦП 9.1, 9.2,…, 9.5 та колектору інтерфейса 10. Відчутники 5.1, 5.2,…, 5.i, 5.n ЕМП під'єднані до пристроїв 6.1, 6.2,…, 6.5 підналагодження частоти, які, використовуючи сигнал генератора 2 поля, налаштовують відчутники 5.1, 5.2,…, 5.5 ЕМП на робочу частоту. Сигнали з пристроїв 6.1, 6.2,…, 6.5 підналагодження надходять на лінійні підсилювачі 7.1, 7.2,…, 7.5, після чого їх обробляють в інтеграторах 8.1, 8.2,…, 8.5. З інтеграторів 8.1, 8.2,…, 8.5 сигнали надходять до АЦП 9.1, 9.2,…, 9.5. Для нормальної роботи АЦП 9.1, 9.2,…, 9.5 вони отримують відповідні сигнали від опорного генератора 3 та формувача 4 імпульсів. Усі сигнали збираються колекторі-інтерфейсі 10, де проходять попередню обробку. Інтерфейс 10 сприймає сигнали АЦП 9.1, 9.2,…, 9.5 опорного генератора З та формувача 4 імпульсів. Водночас, із корисного сигналу виокремлюється стала та динамічна частина сигналу і передається у комп'ютер 11 на подальшу обробку. Таким чином, отримуючи інформаційний сигнал, який характеризує відхилення траєкторії руху кінцівок пацієнта, підвищують точність та достовірність діагнозу в порівнянні із системою прототипу в 2,5-3 рази внаслідок аналізу векторної діаграми руху та діагностують порушення траєкторії за наявності захворювання, а також контролюють в часі динаміку відхилень для підвищення якості діагностики. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Спосіб контролю руху кінцівок людини, в якому здійснюють реєстрацію сигналів від об'єкта, аналізують визначені сегменти електричних сигналів, встановлюють зв'язки між змінами електричних сигналів та наявністю порушення траєкторій руху, який відрізняється тим, що задають траєкторію руху кінцівки, створюють стабільне за своєю конфігурацією та напруженістю електромагнітне поле для вводу в нього пальців кінцівок, реєструють інформаційний сигнал, що визначає векторну діаграму відхилення руху пальців від заданої траєкторії, на підставі якої діагностують зміни динамічних характеристик руху. 2 UA 112592 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A61B 5/0476, A61B 5/04
Мітки: контролю, спосіб, руху, кінцівок, людини
Код посилання
<a href="https://ua.patents.su/5-112592-sposib-kontrolyu-rukhu-kincivok-lyudini.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю руху кінцівок людини</a>
Спосіб порівняння довжини нижніх кінцівок людини
Номер патенту: 8998
Опубліковано: 15.09.2005
Автори: Вислий Анатолій Анатолійович, Вислий Олексій Анатолійович
МПК: A61F 5/00
Мітки: кінцівок, людини, порівняння, нижніх, спосіб, довжини
Формула / Реферат:
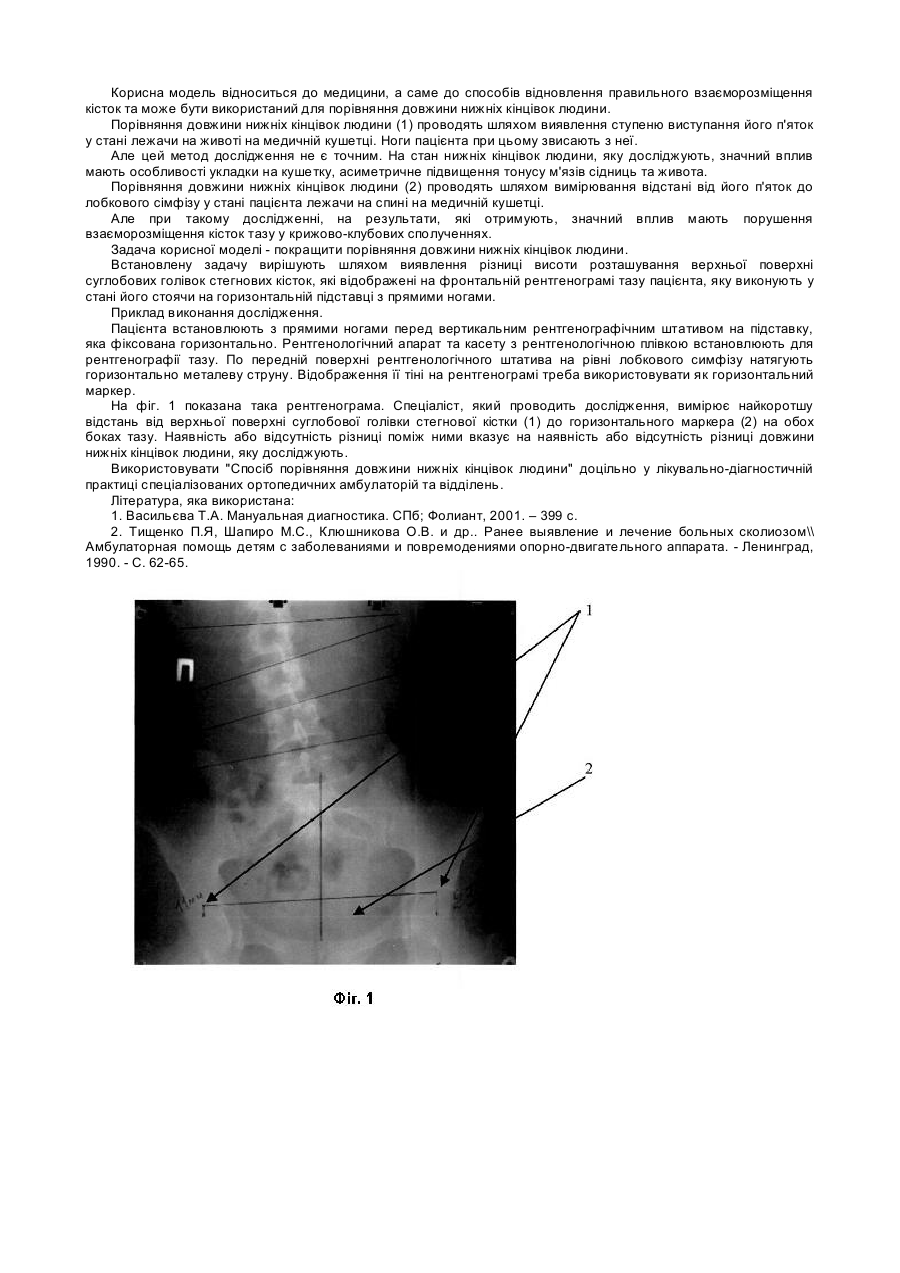
Спосіб порівняння довжини нижніх кінцівок людини, що включає виявлення різниці довжини нижніx кінцівок, який відрізняється тим, що встановлюють її шляхом виявлення різниці висоти розміщення верхньої поверхні суглобових голівок стегнових кісток на фронтальній рентгенограмі тазу, яку виконують у стані пацієнта стоячи з прямими ногами на горизонтальній підставці.
Спосіб контролю коліс під час руху рухомого складу
Номер патенту: 18779
Опубліковано: 15.11.2006
Автори: Осенін Юрій Іванович, Войтенко Володимир Панасович, Войтенко Галина Олегівна
МПК: B61K 9/00
Мітки: рухомого, контролю, складу, руху, спосіб, коліс
Формула / Реферат:
Спосіб контролю коліс під час руху рухомого складу, відповідно якому в колесі збуджують ультразвукові коливання у вигляді поверхневих акустичних хвиль Релея, приймають відбивні від дефектів сигнали і визначають їх величину за результатами порівняння амплітуд відбивних сигналів з еталонним значенням та виявляють місце знаходження дефекту за часом запізнювання відбивних хвиль, який відрізняється тим, що поверхневим акустичним хвилям надають...
Спосіб діагностики спроможності нижніх кінцівок людини
Номер патенту: 68018
Опубліковано: 12.03.2012
Автори: Логінов Анатолій Володимирович, Єрмаков Донат Герасимович
МПК: A61B 17/56
Мітки: діагностики, нижніх, кінцівок, людини, спроможності, спосіб
Формула / Реферат:
Спосіб діагностики спроможності нижніх кінцівок людини, що заснований на вимірюванні кута навантаження, який відрізняється тим, що він вимірюється як кут між механічною та анатомічною осями стегна і визначає анатомо-структурний стан нижніх кінцівок людини, а у нормі його значення становить 6-8 °.
Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху
Номер патенту: 96433
Опубліковано: 10.02.2015
Автори: Саратова Тетяна Сергіївна, Дергачов Константин Юрійович, Кулік Анатолій Степанович, Бандура Іван Миколайович
МПК: G08G 1/01
Мітки: контролю, руху, координації, безпекою, система, комплексного, транспортних, засобів, транспортного
Формула / Реферат:
Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху, що містить антену супутникової навігації, на вхід якої надходить інформація від супутників, а вихід з'єднаний з першим входом першого блока управління на базі ЕОМ, що розміщений на посту-комутаторі, першу антену системи GSM, вихід якої з'єднаний з другим входом першого блока управління, перший модуль безпровідної передачі даних, вхід якого...
Спосіб контролю прямолінійності руху мобільної машини при автоматичному водінні по заданих прямолінійних траєкторіях
Номер патенту: 91785
Опубліковано: 25.08.2010
Автори: Улексін Василь Олексійович, Бойко Владислав Борисович, Надикто Володимир Трохимович
МПК: A01B 69/04
Мітки: заданих, прямолінійних, автоматичному, траєкторіях, руху, мобільної, водінні, спосіб, контролю, прямолінійності, машини
Формула / Реферат:
1. Спосіб контролю прямолінійності руху мобільної машини при автоматичному водінні по заданих прямолінійних траєкторіях за допомогою розташованого на мобільній машині оптичного локатора з обертовою навколо осі вимірювальною площиною приймально-передавальної діаграми, який полягає в тому, що в площині сканування, перпендикулярній осі обертання вимірювальної площини приймально-передавальної діаграми, вимірюють азимутальні кути між лініями...
Попередній патент: Спосіб очищення поверхні води і ґрунту від нафти й нафтопродуктів
Наступний патент: Пристрій підсвічування для багатоканальної ближньої пасивної локації об’єктів
Випадковий патент: Пристрій для дугового зварювання