Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху
Номер патенту: 96433
Опубліковано: 10.02.2015
Автори: Саратова Тетяна Сергіївна, Бандура Іван Миколайович, Дергачов Константин Юрійович, Кулік Анатолій Степанович
Формула / Реферат
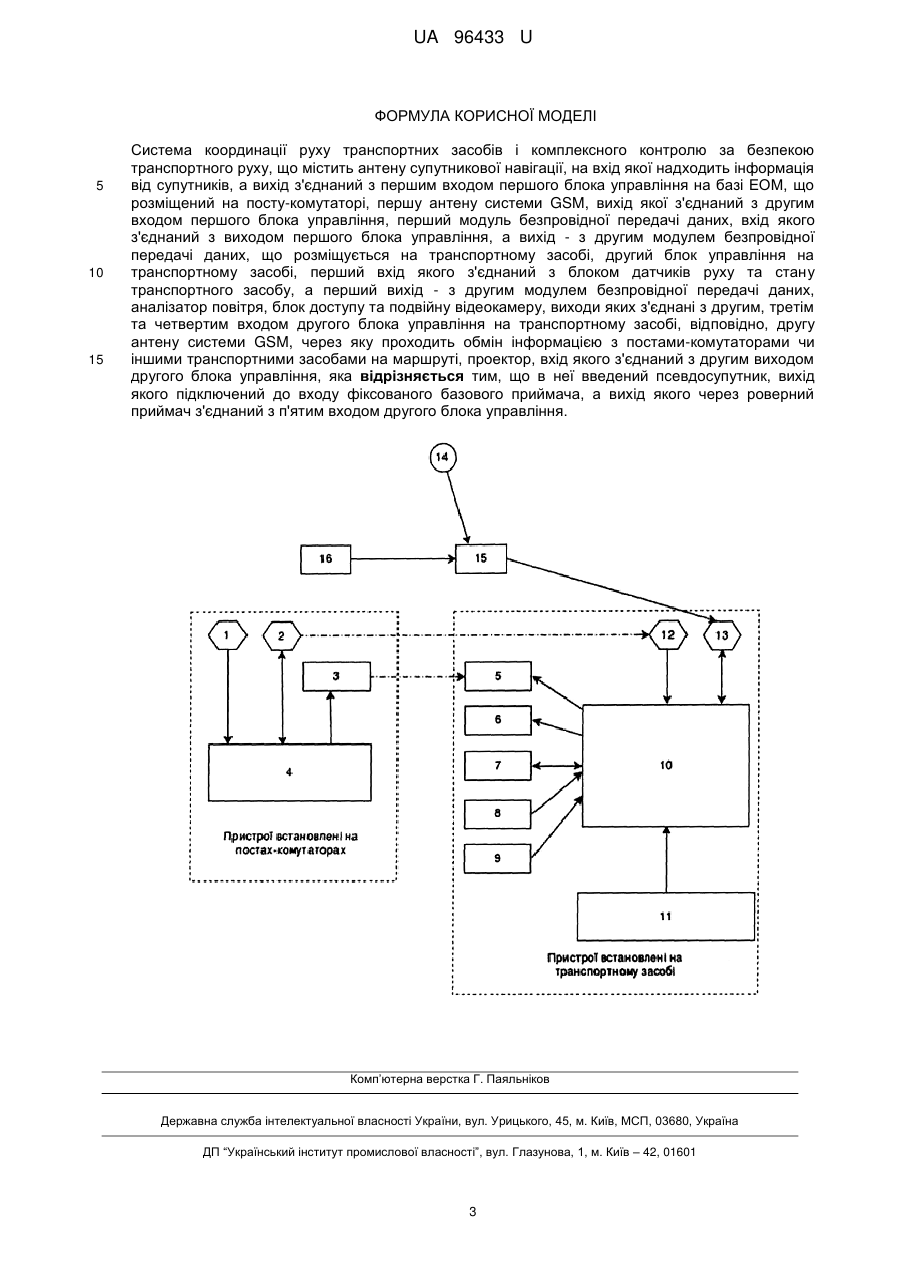
Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху, що містить антену супутникової навігації, на вхід якої надходить інформація від супутників, а вихід з'єднаний з першим входом першого блока управління на базі ЕОМ, що розміщений на посту-комутаторі, першу антену системи GSM, вихід якої з'єднаний з другим входом першого блока управління, перший модуль безпровідної передачі даних, вхід якого з'єднаний з виходом першого блока управління, а вихід - з другим модулем безпровідної передачі даних, що розміщується на транспортному засобі, другий блок управління на транспортному засобі, перший вхід якого з'єднаний з блоком датчиків руху та стану транспортного засобу, а перший вихід - з другим модулем безпровідної передачі даних, аналізатор повітря, блок доступу та подвійну відеокамеру, виходи яких з'єднані з другим, третім та четвертим входом другого блока управління на транспортному засобі, відповідно, другу антену системи GSM, через яку проходить обмін інформацією з постами-комутаторами чи іншими транспортними засобами на маршруті, проектор, вхід якого з'єднаний з другим виходом другого блока управління, яка відрізняється тим, що в неї введений псевдосупутник, вихід якого підключений до входу фіксованого базового приймача, а вихід якого через роверний приймач з'єднаний з п'ятим входом другого блока управління.
Текст
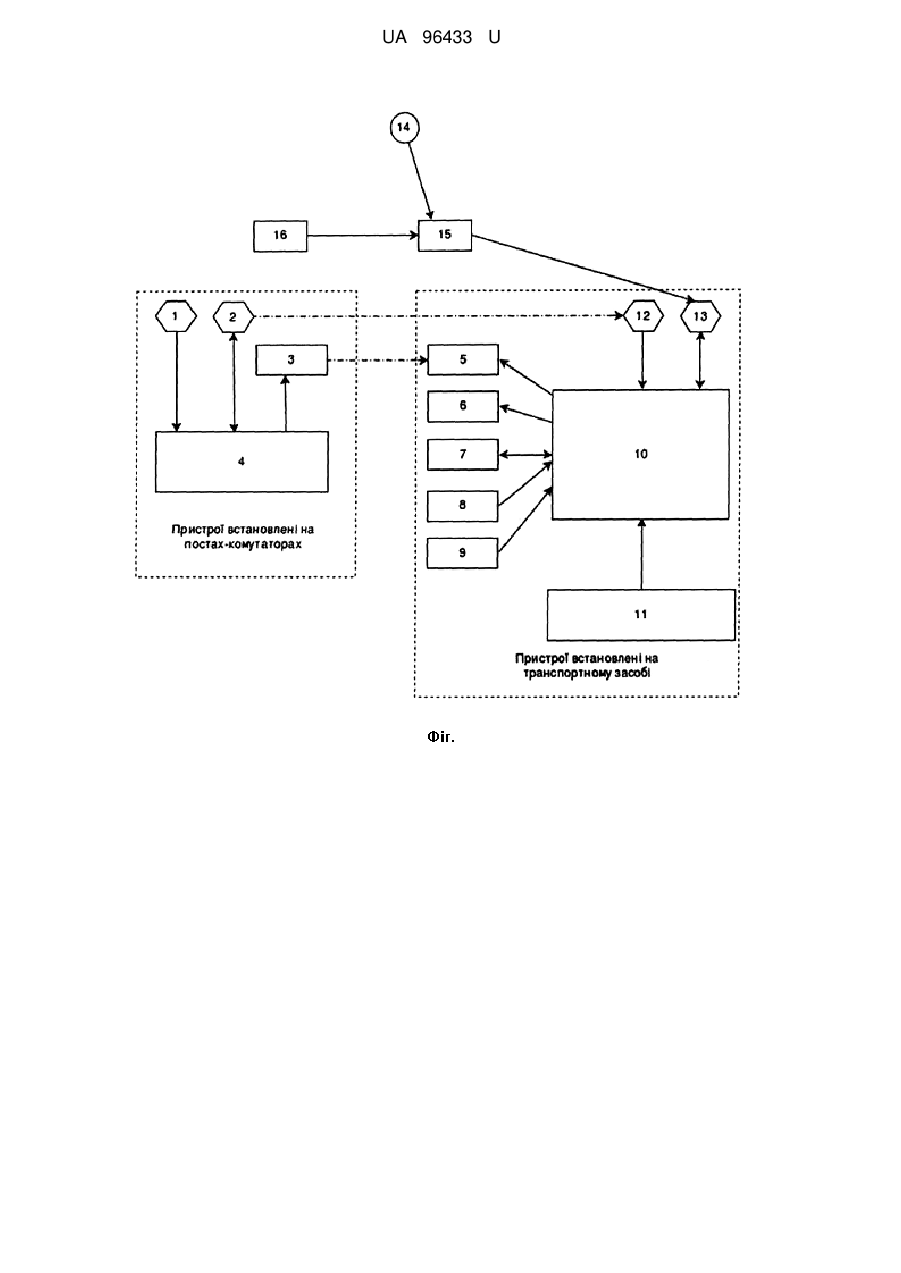
Реферат: Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху містить антену супутникової навігації, на вхід якої надходить інформація від супутників, а вихід з'єднаний з першим входом першого блока управління на базі ЕОМ, що розміщений на посту-комутаторі, першу антену системи GSM, вихід якої з'єднаний з другим входом першого блока управління, перший модуль безпровідної передачі даних, вхід якого з'єднаний з виходом першого блока управління, а вихід - з другим модулем безпровідної передачі даних, що розміщується на транспортному засобі, другий блок управління на транспортному засобі, перший вхід якого з'єднаний з блоком датчиків руху та стану транспортного засобу, а перший вихід - з другим модулем безпровідної передачі даних, аналізатор повітря, блок доступу та подвійну відеокамеру, виходи яких з'єднані з другим, третім та четвертим входом другого блока управління на транспортному засобі, відповідно, другу антену системи GSM, через яку проходить обмін інформацією з постами-комутаторами чи іншими транспортними засобами на маршруті, проектор, вхід якого з'єднаний з другим виходом другого блока управління. В неї введений псевдосупутник, вихід якого підключений до входу фіксованого базового приймача, а вихід якого через роверний приймач з'єднаний з п'ятим входом другого блока управління. UA 96433 U (54) СИСТЕМА КООРДИНАЦІЇ РУХУ ТРАНСПОРТНИХ ЗАСОБІВ І КОМПЛЕКСНОГО КОНТРОЛЮ ЗА БЕЗПЕКОЮ ТРАНСПОРТНОГО РУХУ UA 96433 U UA 96433 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до техніки забезпечення безпеки дорожнього руху та автоматизованого контролю та керування транспортними потоками і може використовуватись для здійснення комплексного контролю за переміщенням рухомих об'єктів в умовах ускладнення прийому сигналу СРНС. Найбільш близькою системою, яка взята як прототип, є система координації руху транспортних засобів і комплексного контролю за безпекою дорожнього руху [патент Російської Федерації на винахід 2457544 G08G 1/01, Бюл. № 21, 2012], що містить антену супутникової навігації, на вхід якої надходить інформація від супутників, а вихід з'єднаний з першим входом першого блока управління на базі ЕОМ, що розміщений на посту-комутаторі, першу антену системи GSM, вихід якої з'єднаний з другим входом першого блока управління, перший модуль безпровідної передачі даних, вхід якого з'єднаний з виходом першого блока управління, а вихід -з другим модулем безпровідної передачі даних, що розміщується на транспортному засобі, другий блок управління на транспортному засобі, перший вхід якого з'єднаний з блоком датчиків руху та стану транспортного засобу, а перший вихід - з другим модулем безпровідної передачі даних, аналізатор повітря, блок доступу та подвійну відеокамеру, виходи яких з'єднані з другим, третім та четвертим входом другого блока управління на транспортному засобі, відповідно, другу антену системи GSM, через яку проходить обмін інформацією з постами-комутаторами чи іншими транспортними засобами на маршруті, проектор, вхід якого з'єднаний з другим виходом другого блока управління. Недоліком цієї системи є неможливість забезпечення високоточної навігації в тих міських районах, де сигнали, що надходять від супутників, блокують високі будівлі, в так званих "міських каньйонах", в умовах Крайньої Півночі, в лісистій місцевості. В основу корисної моделі поставлено задачу підвищення точності позиціонування, забезпечення ефективності функціонування псевдо-супутникової системи як в автономному режимі так і в якості інтегрованої частини ГНСС ГЛОНАСС/GPS. Поставлена задача вирішується тим, що в систему координації руху транспортних засобів і комплексного контролю за безпекою дорожнього руху, що містить антену супутникової навігації, на вхід якої надходить інформація від супутників, а вихід з'єднаний з першим входом першого блока управління на базі ЕОМ, що розміщений на посту-комутаторі, першу антену системи GSM, вихід якої з'єднаний з другим входом першого блока управління, перший модуль безпровідної передачі даних, вхід якого з'єднаний з виходом першого блока управління, а вихід - з другим модулем безпровідної передачі даних, що розміщується на транспортному засобі, другий блок управління на транспортному засобі, перший вхід якого з'єднаний з блоком датчиків руху та стану транспортного засобу, а перший вихід - з другим модулем безпровідної передачі даних, аналізатор повітря, блок доступу та подвійну відеокамеру, виходи яких з'єднані з другим, третім тачетвертим входом другого блока управління на транспортному засобі, відповідно, другу антену системи GSM, через яку проходить обмін інформацією з постами-комутаторами чи іншими транспортними засобами на маршруті, проектор, вхід якого з'єднаний з другим виходом другого блока управління, згідно з корисною моделлю, введений псевдосупутник, вихід якого підключений до входу фіксованого базового приймача, вихід якого через роверний приймач з'єднаний з п'ятим входом другого блока управління. Підвищення точності позиціонування досягається за рахунок відсутності в наземному псевдосупутнику ефемеридних та іоносферних похибок. Наявність окремого фіксованого опорного приймача забезпечує реалізацію розрахунку диференціальних виправлень. Цей факт в свою чергу дозволяє використання псевдосупутників з менш точними, проте і менш дорогими годинниками. Спеціальний метод синхронізації годинників псевдосупутників на базі власних вимірювань робить псевдосупутникову систему повністю незалежною від ГНСС ГЛОНАСС/GPS. Щоб уникнути проблем заглушення сигналів від супутників ГНСС ГЛОНАСС/GPS більш потужними сигналами псевдосупутників пропонується передавати сигнал від псевдосупутників у вигляді коротких імпульсів. Запропоноване технічне рішення пояснюється кресленням, де показана блок-схема системи координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху. До складу системи координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху входить антена супутникової навігації 1, на вхід якої надходить інформація від супутників 14, а вихід з'єднаний з першим входом першого блока управління 4 на базі ЕОМ, що розміщений на посту-комутаторі, перша антена системи GSM 2, вихід якої з'єднаний з другим входом першого блока управління 4, перший модуль безпровідної передачі даних 3, вхід якого з'єднаний з виходом першого блока управління 4, а вихід - з другим модулем безпровідної передачі даних 5, що розміщується на транспортному засобі, другий блок 1 UA 96433 U 5 10 15 20 25 30 35 40 45 50 55 управління 10 на транспортному засобі, перший вхід якого з'єднаний з блоком датчиків 11 руху та стану транспортного засобу, а перший вихід - з другим модулем безпровідної передачі даних 5, аналізатор повітря 9, блок доступу 7 та подвійну відеокамеру 8, виходи яких з'єднані з другим, третім та четвертим входом другого блока управління на транспортному засобі 10, відповідно, другу антену системи GSM 12, через яку проходить обмін інформацією з постамикомутаторами чи іншими транспортними засобами на маршруті, проектор 6, вхід якого з'єднаний з другим виходом другого блока управління. Крім того система містить псевдосупутник 16, вихід якого підключений до входу фіксованого базового приймача 15, вихід якого через роверний приймач 13 з'єднаний з п'ятим входом другого блока управління 10. Запропонована система працює наступним чином. Перед початком руху водій ідентифікує себе - наприклад, вставляє водійське посвідчення з вбудованою SIM-картою в блок доступу 7 і вводить код доступу. Під час руху другий блок управління 10 отримує координати транспортного засобу і порівнює їх зі значеннями еталонної електронної карти, на яку нанесені швидкісні режими, координати лінії розмітки, дорожні знаки та інша інформація, що стосується безпеки дорожнього руху. Якщо координати транспортного засобу відрізняються від допустимих координат для даної ділянки, закладених в електронній карті, то блок управління 10 визначає порушення. В умовах поганої видимості для отримання точної навігаційної інформації, базовий приймач використовує декілька сигналів від псевдосупутника і ГНСС ГЛОНАСС/GPS, формує сет інформації і передає її на роверний приймач, встановлений на транспортному засобі. У разі необхідності підсистема псевдо супутник 16 - базовий приймач 15 - роверний приймач 13 здатна функціонувати незалежно від ГНСС ГЛОНАСС/GPS. Додатково блок управління 10 порівнює отримані дані з даними від електронного блока управління двигуном, відеокамери 8, датчиків 11, інших базових блоків автомобіля. Всі отримані відомості аналізуються і фіксуються блоком управління 10 в постійному запам'ятовуючому пристрої. Ця та інша допоміжна інформація постійно виводяться з допомогою проектора 6 на лобове скло і, в разі спроби порушення, з'являється попередження. У тому випадку, якщо водій його ігнорує і здійснює порушення правил дорожнього руху, відеокамера 8 фіксує це і вся інформація, включаючи координати, показники датчиків, фотографії та інше, передається через один із засобів бездротової передачі інформації залежно від тяжкості порушення, негайно - через GSM / GPRS- блок 10, або при проїзді повз найближчий стаціонарний пост - через модуль бездротової передачі інформації 5. Крім цього, блок управління 10 через модуль бездротової передачі інформації 5 обмінюється даними про свої координатах і швидкості руху з оточуючими транспортними засобами та постамикомутаторами (світлофорами, постами та екіпажами ДПС, естакадами). Отримані дані обробляються блоком управління 10 і також виводяться за допомогою проектора 6 на лобове скло, допомагаючи водієві орієнтуватися в дорожній обстановці і вибирати оптимальну швидкість і дистанцію. У разі керування транспортним засобом водієм, що знаходиться в стані алкогольного сп'яніння, блок управління 10 аналізує інформацію про функції траєкторії координат руху за допомогою порівняння середньостатистичних даних по функції траєкторії руху і реакції водія на перешкоди за минулий час. Також враховуються показання аналізатора видихуваного повітря 9 та інші дані від базових блоків транспортного засобу. У разі підтвердження стану сп'яніння блок управління 10 далі діє за вищеописаним сценарієм фіксації порушень. Якщо транспортний засіб потрапляє в аварію, то блок управління 10, отримавши сигнал від базових блоків транспортного засобу про зіткнення (датчики, блоки подушок безпеки), миттєво включає режим екстреного оповіщення. Цей режим передбачає передачу інформації в екстрені служби та на оточуючі транспортні засоби через GSM/GPRS - блок 10 та/або модуль бездротової передачі інформації 5 сигналу про аварію з її точними координатами. Всі обставини до і після аварії, такі як координати, швидкість руху обох транспортних засобів, показання датчиків, відеокамер та інших модулів зберігаються в постійному запам'ятовуючому пристрої. Таким чином, запропонована система дозволяє проводити комплексний контроль за транспортним засобом на маршруті, фіксувати порушення правил дорожнього руху, передавати інформацію про ДТП чи порушення правил дорожнього руху в відповідні служби, допомагає в керуванні транспортним засобом, формуючи цілу низку необхідної інформації як про стан самого транспортного засобу, так і про ситуацію на маршруті, дозволяє підвищити точність визначення координат рухомого об'єкта, забезпечити координацію транспортних потоків в умовах мегаполісу. 60 2 UA 96433 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху, що містить антену супутникової навігації, на вхід якої надходить інформація від супутників, а вихід з'єднаний з першим входом першого блока управління на базі ЕОМ, що розміщений на посту-комутаторі, першу антену системи GSM, вихід якої з'єднаний з другим входом першого блока управління, перший модуль безпровідної передачі даних, вхід якого з'єднаний з виходом першого блока управління, а вихід - з другим модулем безпровідної передачі даних, що розміщується на транспортному засобі, другий блок управління на транспортному засобі, перший вхід якого з'єднаний з блоком датчиків руху та стану транспортного засобу, а перший вихід - з другим модулем безпровідної передачі даних, аналізатор повітря, блок доступу та подвійну відеокамеру, виходи яких з'єднані з другим, третім та четвертим входом другого блока управління на транспортному засобі, відповідно, другу антену системи GSM, через яку проходить обмін інформацією з постами-комутаторами чи іншими транспортними засобами на маршруті, проектор, вхід якого з'єднаний з другим виходом другого блока управління, яка відрізняється тим, що в неї введений псевдосупутник, вихід якого підключений до входу фіксованого базового приймача, а вихід якого через роверний приймач з'єднаний з п'ятим входом другого блока управління. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKulyk Anatoliy Stepanovych, Bandura Ivan Mykolaiovych
Автори російськоюКулик Анатолий Степанович, Бандура Иван Николаевич
МПК / Мітки
МПК: G08G 1/01
Мітки: комплексного, контролю, руху, засобів, координації, транспортного, транспортних, безпекою, система
Код посилання
<a href="https://ua.patents.su/5-96433-sistema-koordinaci-rukhu-transportnikh-zasobiv-i-kompleksnogo-kontrolyu-za-bezpekoyu-transportnogo-rukhu.html" target="_blank" rel="follow" title="База патентів України">Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху</a>
Система контролю маршрутів рухання наземних транспортних засобів
Номер патенту: 52943
Опубліковано: 15.01.2003
Автори: Костусяк Віктор Семенович, Вишневський Юрій Олександрович, Демидов Олександр Григорович, Олексієнко Олег Володимирович
МПК: G01C 21/34, G01C 7/00, G01C 21/26
Мітки: засобів, система, наземних, контролю, транспортних, маршрутів, рухання
Формула / Реферат:
Система контролю маршрутів рухання наземних транспортних засобів, яка містить в собі приймач сигналів від супутників GPS-ГЛОНАСС, обладнаний антеною для приймання сигналів і разом з антеною встановлений в кожному підконтрольному наземному транспортному засобі, а також окремо розташований блок обробки здобутої інформації, включаючий стаціонарний комп'ютер, яка відрізняється тим, що на кожному підконтрольному наземному транспортному засобі...
Мобільна диспетчерська система для транспортних засобів
Номер патенту: 44047
Опубліковано: 15.01.2002
Автори: Барладін Олександр Володимирович, Барладін Петро Олександрович
МПК: G08G 1/0969, G09B 29/10
Мітки: система, мобільна, транспортних, засобів, диспетчерська
Формула / Реферат:
1. Мобільна диспетчерська система для транспортних засобів, що містить модуль управління, дисплей, картографічний модуль, модуль визначення координат і модуль передачі радіосигналу, яка відрізняється тим, що містить перший блок, який включає модулі визначення координат і передачі радіосигналу, з'єднані між собою і обладнані модулем стану, з'єднаним з модулем передачі сигналу, і автономним джерелом живлення, з'єднаним з модулем стану, і другий...
Автоматизована система аналізу дотримання правил дорожнього руху, виявлення причин виникнення дорожньо-транспортних пригод і контролю користування платними ділянками
Номер патенту: 106291
Опубліковано: 11.08.2014
Автори: Грінченко Олена Володимирівна, Лук'янов Олександр Михайлович, Дохов Олександр Іванович, Галевич Максим Миколайович, Лук'янова Ольга Олексіївна
МПК: G08G 1/056, G08G 1/0962, G01C 21/26, G08G 1/052, G07B 15/00
Мітки: аналізу, руху, дорожнього, правил, система, дотримання, користування, причин, платними, ділянками, дорожно-транспортних, автоматизована, пригод, виявлення, виникнення, контролю
Формула / Реферат:
Автоматизована система аналізу дотримання правил дорожнього руху, виявлення причин виникнення дорожньо-транспортних пригод і контролю користування платними ділянками, що включає в себе центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу центру збору і обробки інформації входять: приймальний пристрій, блок екстреного...
Система резервування вимірників тримірного руху транспортних засобів
Номер патенту: 18796
Опубліковано: 15.11.2006
Автори: Сагіна Марина Юріївна, Бандура Іван Миколайович, Журавльова Надія Костянтинівна
МПК: B64C 13/00
Мітки: тримірного, транспортних, резервування, засобів, вимірників, руху, система
Формула / Реферат:
1. Система резервування вимірників тримірного руху транспортних засобів, що містить три датчики, осі чутливості яких спрямовані уздовж трьох взаємно перпендикулярних осей зв'язаної системи координат керування транспортного засобу, виходи яких з'єднані з пристроєм контролю датчиків, яка відрізняється тим, що в неї введені чотири додаткових датчики, осі чутливості яких спрямовані вздовж осей косокутної системи координат, що розташовані...
Система автоматичного управління паркуванням транспортних засобів
Номер патенту: 87089
Опубліковано: 27.01.2014
Автори: Хлівнюк Ванда Олександрівна, Дергачов Костянтин Юрійович, Кулік Анатолій Степанович, Харіна Наталія Миколаївна
МПК: G01S 3/02
Мітки: автоматичного, паркуванням, транспортних, система, засобів, управління
Формула / Реферат:
Система автоматичного управління паркуванням транспортних засобів, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем...
Попередній патент: Установка для штампування рельєфів на зовнішніх поверхнях труб
Наступний патент: Пристрій для дозованої подачі порошку
Випадковий патент: Золь діоксиду кремнію, спосіб його одержання та спосіб одержання паперу