Спосіб контролю коліс під час руху рухомого складу
Номер патенту: 18779
Опубліковано: 15.11.2006
Автори: Осенін Юрій Іванович, Войтенко Володимир Панасович, Войтенко Галина Олегівна
Формула / Реферат
Спосіб контролю коліс під час руху рухомого складу, відповідно якому в колесі збуджують ультразвукові коливання у вигляді поверхневих акустичних хвиль Релея, приймають відбивні від дефектів сигнали і визначають їх величину за результатами порівняння амплітуд відбивних сигналів з еталонним значенням та виявляють місце знаходження дефекту за часом запізнювання відбивних хвиль, який відрізняється тим, що поверхневим акустичним хвилям надають форму кругових хвиль з центром на осі колеса, додатково за амплітудами та часом запізнювання відбивних сигналів визначають площу контактної плями, проковзування ведучих коліс, внесену анізотропію матеріалу колеса.
Текст
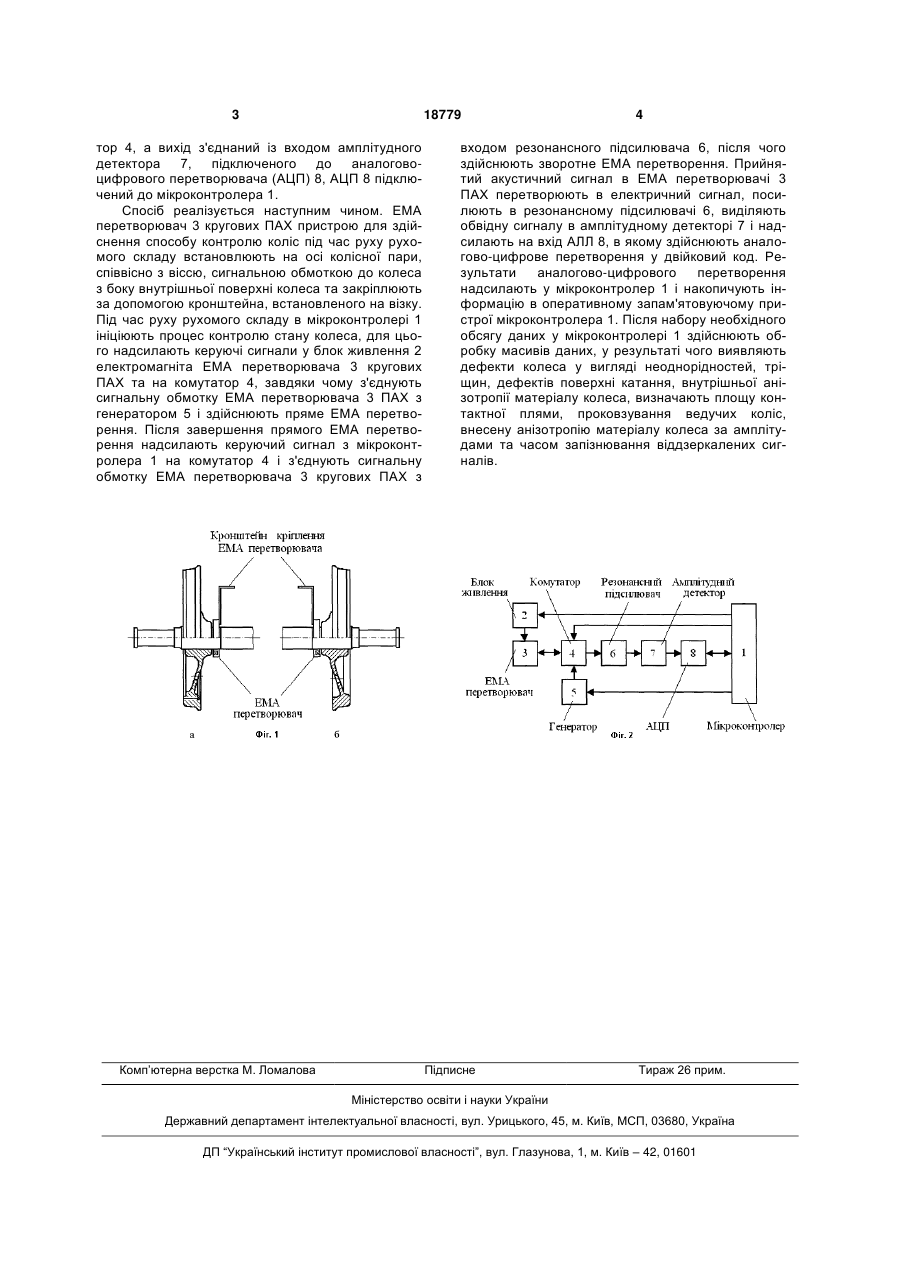
Спосіб контролю коліс під час руху рухомого складу, відповідно якому в колесі збуджують ультразвукові коливання у вигляді поверхневих акустичних хвиль Релея, приймають відбивні від де 3 18779 тор 4, а вихід з'єднаний із входом амплітудного детектора 7, підключеного до аналоговоцифрового перетворювача (АЦП) 8, АЦП 8 підключений до мікроконтролера 1. Спосіб реалізується наступним чином. ЕМА перетворювач 3 кругових ПАХ пристрою для здійснення способу контролю коліс під час руху рухомого складу встановлюють на осі колісної пари, співвісно з віссю, сигнальною обмоткою до колеса з боку внутрішньої поверхні колеса та закріплюють за допомогою кронштейна, встановленого на візку. Під час руху рухомого складу в мікроконтролері 1 ініціюють процес контролю стану колеса, для цього надсилають керуючі сигнали у блок живлення 2 електромагніта ЕМА перетворювача 3 кругових ПАХ та на комутатор 4, завдяки чому з'єднують сигнальну обмотку ЕМА перетворювача 3 ПАХ з генератором 5 і здійснюють пряме ЕМА перетворення. Після завершення прямого ЕМА перетворення надсилають керуючий сигнал з мікроконтролера 1 на комутатор 4 і з'єднують сигнальну обмотку ЕМА перетворювача 3 кругових ПАХ з Комп’ютерна верстка М. Ломалова 4 входом резонансного підсилювача 6, після чого здійснюють зворотне ЕМА перетворення. Прийнятий акустичний сигнал в ЕМА перетворювачі 3 ПАХ перетворюють в електричний сигнал, посилюють в резонансному підсилювачі 6, виділяють обвідну сигналу в амплітудному детекторі 7 і надсилають на вхід АЛЛ 8, в якому здійснюють аналогово-цифрове перетворення у двійковий код. Результати аналогово-цифрового перетворення надсилають у мікроконтролер 1 і накопичують інформацію в оперативному запам'ятовуючому пристрої мікроконтролера 1. Після набору необхідного обсягу даних у мікроконтролері 1 здійснюють обробку масивів даних, у результаті чого виявляють дефекти колеса у вигляді неоднорідностей, тріщин, дефектів поверхні катання, внутрішньої анізотропії матеріалу колеса, визначають площу контактної плями, проковзування ведучих коліс, внесену анізотропію матеріалу колеса за амплітудами та часом запізнювання віддзеркалених сигналів. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of inspection of wheels during motion of rolling stock
Автори англійськоюVoitenko Volodymyr Panasovych, Osenin Yurii Ivanovych
Назва патенту російськоюСпособ контроля колес во время движения подвижного состава
Автори російськоюВойтенко Владимир Афанасьевич, Осенин Юрий Иванович
МПК / Мітки
МПК: B61K 9/00
Мітки: рухомого, руху, складу, спосіб, коліс, контролю
Код посилання
<a href="https://ua.patents.su/2-18779-sposib-kontrolyu-kolis-pid-chas-rukhu-rukhomogo-skladu.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю коліс під час руху рухомого складу</a>
Спосіб автоматичного контролю технічного стану колісних пар рухомого складу
Номер патенту: 13087
Опубліковано: 15.03.2006
Автори: Осенін Юрій Іванович, Войтенко Галина Олегівна
МПК: B61K 9/00
Мітки: пар, автоматичного, контролю, колісних, рухомого, стану, спосіб, технічного, складу
Формула / Реферат:
Спосіб автоматичного контролю технічного стану колісних пар рухомого складу, згідно з яким в контрольованому виробі, під кутом до його поверхні, збуджують ультразвукові коливання у вигляді нормальних хвиль асиметричної нульової моди за критичним кутом падіння Релея, приймають віддзеркалені від зерен метала та дефектів сигнали і визначають їх величину за результатами порівняння амплітуд віддзеркалених сигналів з еталонним значенням, збуджують...
Пристрій для контролю проходження колісної пари залізничного рухомого складу
Номер патенту: 36827
Опубліковано: 16.04.2001
Автори: Гаврилюк Володимир Ілліч, Гончаров Костянтин Вікторович
МПК: B61L 1/00
Мітки: проходження, контролю, складу, пари, залізничного, рухомого, пристрій, колісної
Текст:
...фіксації пониження амплітуди 8 та підвищення частоти 10 виробляють сигнали логічної одиниці, а елемент збігу 12 - сигнал С одиничного рівня, що сигналізує про прохід колеса. При відході чутливого елемента 2 від рейки 1 збільшується реактивна та зменшується активна складова електричного опору чутливого елемента за рахунок ослаблення його індуктивного зв'язку з рейкою. Це призводить до зменшення частоти та збільшення амплітуди змитої...
Пристрій для поточного контролю механічної частини рухомого складу залізниць
Номер патенту: 2290
Опубліковано: 15.01.2004
Автори: Дьомін Юрій Васильович, Дьомін Ростислав Юрійович, Дмитрієв Дмитро Вікторович, Кирпа Георгій Миколайович
МПК: B61K 9/00
Мітки: механічної, залізниць, складу, частини, поточного, контролю, пристрій, рухомого
Формула / Реферат:
Пристрій для поточного контролю механічної частини рухомого складу залізниць, що включає блок виміру вертикальних та горизонтальних віброприскорень кузова одиниці рухомого складу, зв'язаний блоком сполучення з ЕОМ, блок електричного живлення та блок пам'яті, який відрізняється тим, що він обладнаний розташованим на одиниці рухомого складу бортовим реєстратором з блоком контролю поздовжніх віброприскорень, датчик котрого закріплено на рамі...
Пристрій для контролю проїзду залізничного рухомого складу
Номер патенту: 43043
Опубліковано: 15.11.2001
Автори: Рябовол Сергій Олександрович, Гаврилюк Володимир Ілліч
МПК: B61L 1/00
Мітки: залізничного, складу, контролю, рухомого, проїзду, пристрій
Формула / Реферат:
Пристрій для контролю проїзду залізничного рухомого складу, що має постійний магніт, кронштейн з феромагнітного матеріалу, що кріпиться до підошви рейки, датчик Голла, який розташовано у колі силових ліній постійного магніту, який відрізняється тим, що має додатковий датчик Голла, який знаходиться поза колом силових ліній магніту, причому струмові виводи обох датчиків Голла підключено послідовно до стабілізатора струму, а голлівські виводи...
Пристрій для контролю проходження колісної пари залізничного рухомого складу
Номер патенту: 38081
Опубліковано: 15.05.2001
Автори: Гончаров Костянтин Вікторович, Гаврилюк Володимир Ілліч, Байдуж Анатолій Миколайович
МПК: B61L 1/00
Мітки: контролю, залізничного, рухомого, пристрій, складу, колісної, пари, проходження
Текст:
...4 за рахунок ослаблення його індуктивного зв'язку з рейкою. Це призводить до зменшення частоти f3. При цьому значення різниць N1-N3 та N2-N3 одночасно виходять за межі заданого інтервалу. Мікроконтролер виробляє сигнал логічної одиниці Z, що сигналізує про порушення в роботі пристрою. Тому як генератори 5, 6 та 7 складаються з однакових елементів, то характер зміни їх частот під впливом температурних коливань буде однаковим. Тому...
Попередній патент: Терморегульований кріостатний пристрій
Наступний патент: Спосіб лікування пацієнтів з мілким присінком порожнини рота
Випадковий патент: Спосіб діагностики розвитку остеопорозу