Спосіб контролю прямолінійності руху мобільної машини при автоматичному водінні по заданих прямолінійних траєкторіях
Номер патенту: 91785
Опубліковано: 25.08.2010
Автори: Бойко Владислав Борисович, Улексін Василь Олексійович, Надикто Володимир Трохимович

Формула / Реферат
1. Спосіб контролю прямолінійності руху мобільної машини при автоматичному водінні по заданих прямолінійних траєкторіях за допомогою розташованого на мобільній машині оптичного локатора з обертовою навколо осі вимірювальною площиною приймально-передавальної діаграми, який полягає в тому, що в площині сканування, перпендикулярній осі обертання вимірювальної площини приймально-передавальної діаграми, вимірюють азимутальні кути між лініями візування двох реперних відбивачів та фіксованою відносно мобільної машини лінією нульового положення вимірювальної площини, який відрізняється тим, що реперні відбивачі встановлюють на протилежних кінцях траєкторії руху мобільної машини з обох кінців гону, а лінію нульового положення вимірювальної площини орієнтують відносно мобільної машини таким чином, щоб, при відсутності відхилень машини від заданої траєкторії, вона співпадала з лінією заданої траєкторії.
2. Спосіб контролю прямолінійності руху мобільної машини при автоматичному водінні по заданих прямолінійних траєкторіях за п. 1, який відрізняється тим, що чотири реперні відбивачі встановлюють попарно на двох візках на відстані, рівній ширині захвату мобільної машини, а візки розташовують на протилежних кінцях гонів і почергово переставляють у наступні положення при розворотах мобільної машини з кроком, рівним подвійній ширині захвату мобільної машини, причому можливі положення візків відносно поля зафіксовані постійними мітками, наприклад кілками у ґрунті, а кут огляду відбивачів у горизонтальній площині обмежують екранами.
Текст
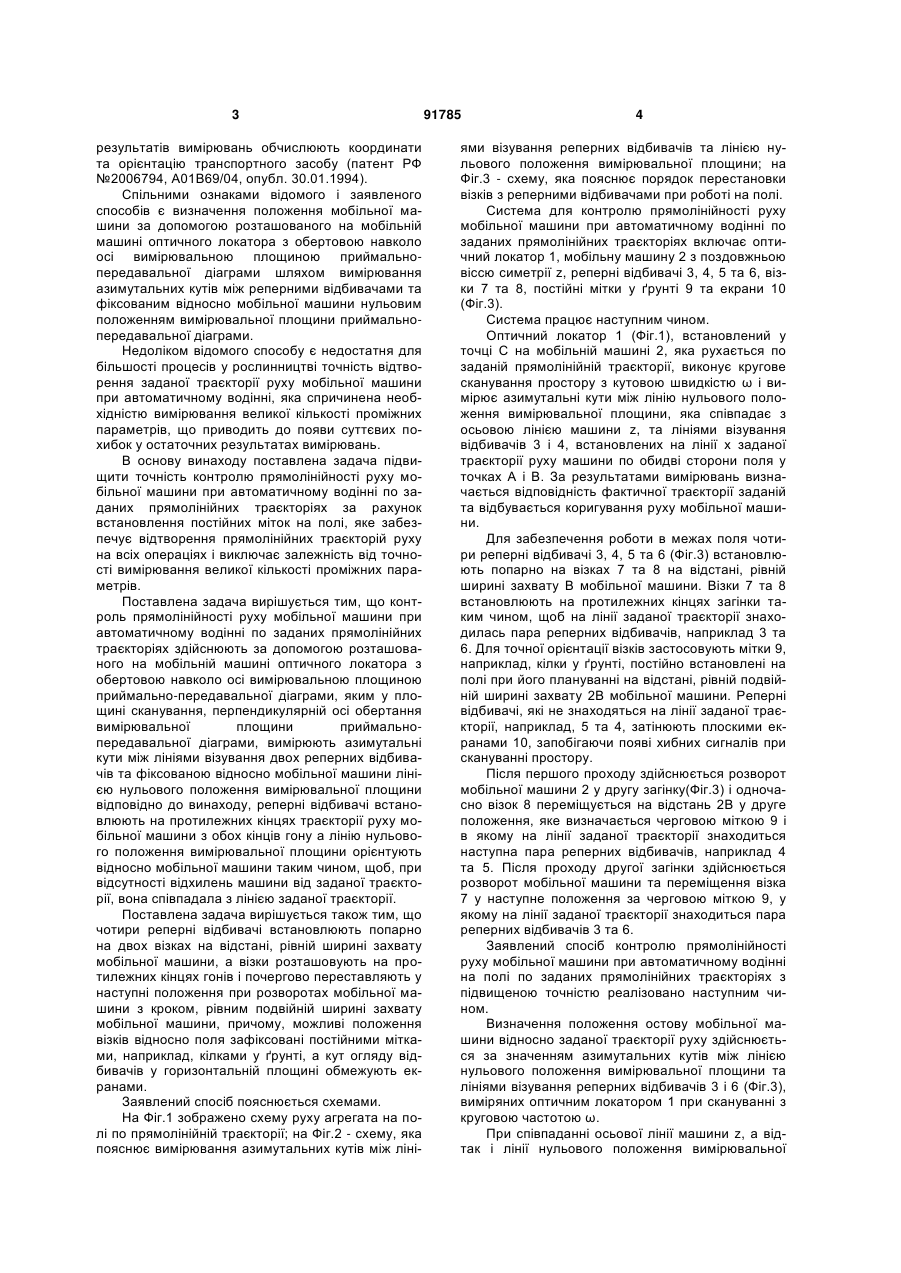
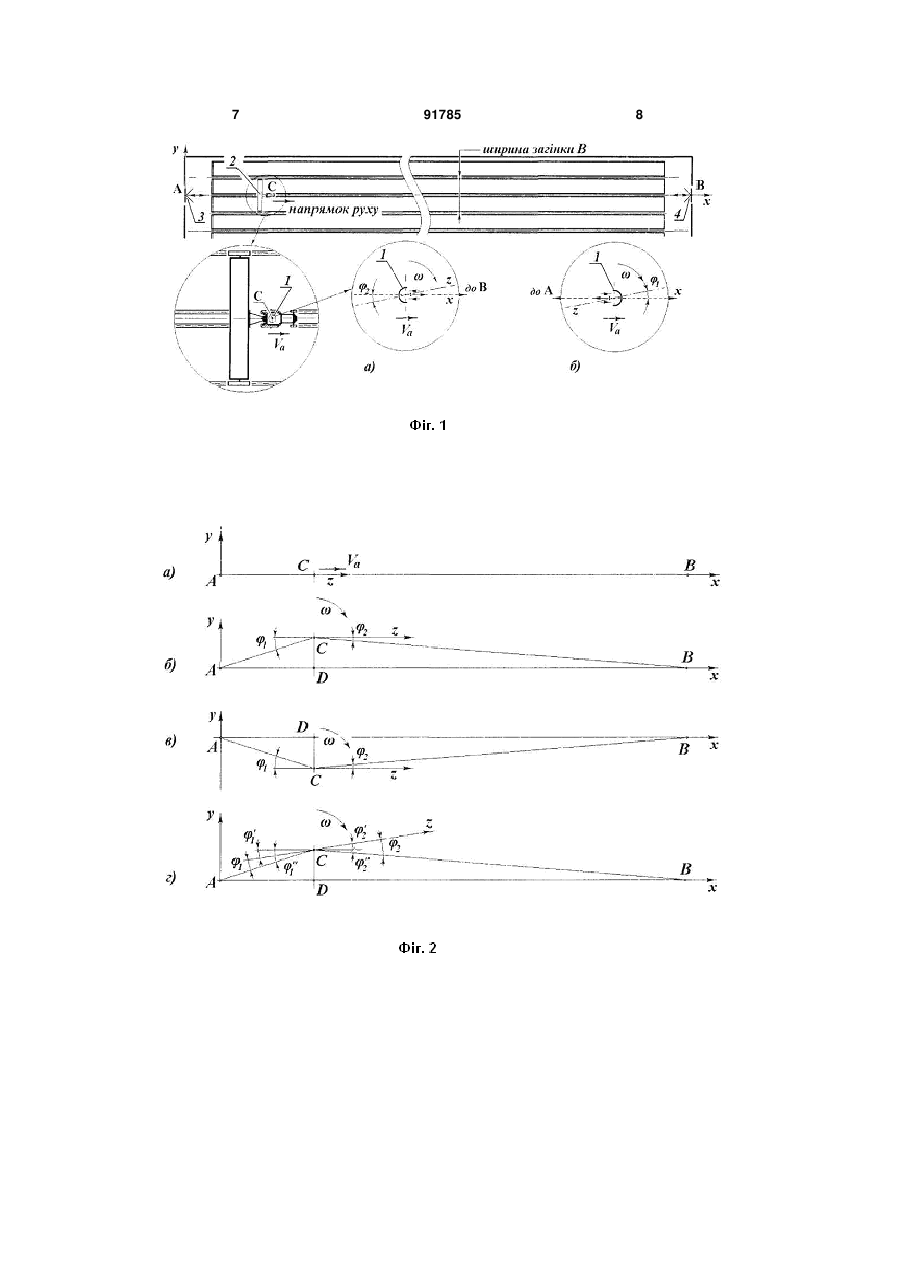
1. Спосіб контролю прямолінійності руху мобільної машини при автоматичному водінні по заданих прямолінійних траєкторіях за допомогою розташованого на мобільній машині оптичного локатора з обертовою навколо осі вимірювальною площиною приймально-передавальної діаграми, який полягає в тому, що в площині сканування, перпендикулярній осі обертання вимірювальної C2 2 (19) 1 3 результатів вимірювань обчислюють координати та орієнтацію транспортного засобу (патент РФ №2006794, А01В69/04, опубл. 30.01.1994). Спільними ознаками відомого і заявленого способів є визначення положення мобільної машини за допомогою розташованого на мобільній машині оптичного локатора з обертовою навколо осі вимірювальною площиною приймальнопередавальної діаграми шляхом вимірювання азимутальних кутів між реперними відбивачами та фіксованим відносно мобільної машини нульовим положенням вимірювальної площини приймальнопередавальної діаграми. Недоліком відомого способу є недостатня для більшості процесів у рослинництві точність відтворення заданої траєкторії руху мобільної машини при автоматичному водінні, яка спричинена необхідністю вимірювання великої кількості проміжних параметрів, що приводить до появи суттєвих похибок у остаточних результатах вимірювань. В основу винаходу поставлена задача підвищити точність контролю прямолінійності руху мобільної машини при автоматичному водінні по заданих прямолінійних траєкторіях за рахунок встановлення постійних міток на полі, яке забезпечує відтворення прямолінійних траєкторій руху на всіх операціях і виключає залежність від точності вимірювання великої кількості проміжних параметрів. Поставлена задача вирішується тим, що контроль прямолінійності руху мобільної машини при автоматичному водінні по заданих прямолінійних траєкторіях здійснюють за допомогою розташованого на мобільній машині оптичного локатора з обертовою навколо осі вимірювальною площиною приймально-передавальної діаграми, яким у площині сканування, перпендикулярній осі обертання вимірювальної площини приймальнопередавальної діаграми, вимірюють азимутальні кути між лініями візування двох реперних відбивачів та фіксованою відносно мобільної машини лінією нульового положення вимірювальної площини відповідно до винаходу, реперні відбивачі встановлюють на протилежних кінцях траєкторії руху мобільної машини з обох кінців гону а лінію нульового положення вимірювальної площини орієнтують відносно мобільної машини таким чином, щоб, при відсутності відхилень машини від заданої траєкторії, вона співпадала з лінією заданої траєкторії. Поставлена задача вирішується також тим, що чотири реперні відбивачі встановлюють попарно на двох візках на відстані, рівній ширині захвату мобільної машини, а візки розташовують на протилежних кінцях гонів і почергово переставляють у наступні положення при розворотах мобільної машини з кроком, рівним подвійній ширині захвату мобільної машини, причому, можливі положення візків відносно поля зафіксовані постійними мітками, наприклад, кілками у ґрунті, а кут огляду відбивачів у горизонтальній площині обмежують екранами. Заявлений спосіб пояснюється схемами. На Фіг.1 зображено схему руху агрегата на полі по прямолінійній траєкторії; на Фіг.2 - схему, яка пояснює вимірювання азимутальних кутів між ліні 91785 4 ями візування реперних відбивачів та лінією нульового положення вимірювальної площини; на Фіг.3 - схему, яка пояснює порядок перестановки візків з реперними відбивачами при роботі на полі. Система для контролю прямолінійності руху мобільної машини при автоматичному водінні по заданих прямолінійних траєкторіях включає оптичний локатор 1, мобільну машину 2 з поздовжньою віссю симетрії z, реперні відбивачі 3, 4, 5 та 6, візки 7 та 8, постійні мітки у ґрунті 9 та екрани 10 (Фіг.3). Система працює наступним чином. Оптичний локатор 1 (Фіг.1), встановлений у точці С на мобільній машині 2, яка рухається по заданій прямолінійній траєкторії, виконує кругове сканування простору з кутовою швидкістю ω і вимірює азимутальні кути між лінію нульового положення вимірювальної площини, яка співпадає з осьовою лінією машини z, та лініями візування відбивачів 3 і 4, встановлених на лінії x заданої траєкторії руху машини по обидві сторони поля у точках А і В. За результатами вимірювань визначається відповідність фактичної траєкторії заданій та відбувається коригування руху мобільної машини. Для забезпечення роботи в межах поля чотири реперні відбивачі 3, 4, 5 та 6 (Фіг.3) встановлюють попарно на візках 7 та 8 на відстані, рівній ширині захвату В мобільної машини. Візки 7 та 8 встановлюють на протилежних кінцях загінки таким чином, щоб на лінії заданої траєкторії знаходилась пара реперних відбивачів, наприклад 3 та 6. Для точної орієнтації візків застосовують мітки 9, наприклад, кілки у ґрунті, постійно встановлені на полі при його плануванні на відстані, рівній подвійній ширині захвату 2В мобільної машини. Реперні відбивачі, які не знаходяться на лінії заданої траєкторії, наприклад, 5 та 4, затінюють плоскими екранами 10, запобігаючи появі хибних сигналів при скануванні простору. Після першого проходу здійснюється розворот мобільної машини 2 у другу загінку(Фіг.3) і одночасно візок 8 переміщується на відстань 2В у друге положення, яке визначається черговою міткою 9 і в якому на лінії заданої траєкторії знаходиться наступна пара реперних відбивачів, наприклад 4 та 5. Після проходу другої загінки здійснюється розворот мобільної машини та переміщення візка 7 у наступне положення за черговою міткою 9, у якому на лінії заданої траєкторії знаходиться пара реперних відбивачів 3 та 6. Заявлений спосіб контролю прямолінійності руху мобільної машини при автоматичному водінні на полі по заданих прямолінійних траєкторіях з підвищеною точністю реалізовано наступним чином. Визначення положення остову мобільної машини відносно заданої траєкторії руху здійснюється за значенням азимутальних кутів між лінією нульового положення вимірювальної площини та лініями візування реперних відбивачів 3 і 6 (Фіг.3), виміряних оптичним локатором 1 при скануванні з круговою частотою ω. При співпаданні осьової лінії машини z, а відтак і лінії нульового положення вимірювальної 5 площини, з лінією л: заданої траєкторії (Фіг.2а), значення виміряних локатором кутів візування реперних відбивачів будуть дорівнювати нулю (φ1=φ2=0, Фіг.1а та 1б), і команди механізмам корекції напрямку руху машини відсутні. При появі повороту осі z машини, яка знаходиться на лінії заданої траєкторії, відносно лінії х заданої траєкторії на кут φ, оптичний локатор 1 (Фіг.1) виявляє наявність кутів візування (φ1≠0 та φ2≠0), причому їх величина і знак однакові. Тобто φ1=φ2=φ, а знак визначає, в яку сторону відбувся поворот машини відносно заданої траєкторії руху: - φ0 (запізнення) - має місце поворот остова машини в напрямку сканування. При зміщенні осі мобільної машини z відносно лінії заданої траєкторії х на відстань DC та при відсутності повороту φ=0 (Фіг.2б та 2в) оптичний локатор 1 виявляє появу кутів візування φ1≠0 та φ2≠0. Причому, їх знак протилежний і, якщо мобільна машина не знаходиться на однаковій відстані від А та В, то |φ1|≠|φ2|. За знаком кутів φ1 та φ2 можна зробити наступні висновки: - φ10 (запізнення), тобто, кут візування реперних відбивачів АСВ=πφ1+φ2>π - має місце зміщення машини від заданої траєкторії вліво по ходу; - φ1>0 (запізнення), φ2
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of linearity of mobile machine movement at automatic driving in predetermined linear path
Автори англійськоюUleskin Vasyl Oleksiiovych, Nadykto Volodymyr Trokhymovych, Boiko Vladyslav Borysovych
Назва патенту російськоюСпособ контроля прямолинейности движения мобильной машины при автоматическом вождении по заданным прямолинейным траекториям
Автори російськоюУлексин Василий Алексеевич, Надикто Владимир Трофимович, Бойко Владислав Борисович
МПК / Мітки
МПК: A01B 69/04
Мітки: заданих, машини, мобільної, руху, спосіб, прямолінійності, водінні, прямолінійних, траєкторіях, автоматичному, контролю
Код посилання
<a href="https://ua.patents.su/5-91785-sposib-kontrolyu-pryamolinijjnosti-rukhu-mobilno-mashini-pri-avtomatichnomu-vodinni-po-zadanikh-pryamolinijjnikh-traehktoriyakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю прямолінійності руху мобільної машини при автоматичному водінні по заданих прямолінійних траєкторіях</a>
Турбокомпресор для двигуна внутрішнього згоряння мобільної машини
Номер патенту: 28231
Опубліковано: 26.11.2007
Автори: Топчій Святослав Сергійович, Топчій Сергій Іванович
МПК: F02B 41/00
Мітки: турбокомпресор, згоряння, внутрішнього, мобільної, двигуна, машини
Формула / Реферат:
Турбокомпресор для двигуна внутрішнього згоряння мобільної машини, що має середній корпус з встановленим в ньому підшипником вала турбокомпресора, вал, турбінне і компресорні колеса, встановлені на валу, корпуси турбіни і компресора, приєднані до середнього корпусу, який відрізняється тим, що в корпусі компресора в напрямку, протилежному напрямку обертання колеса компресора, і під кутом до лопаток колеса виконано соплові канали, до яких...
Турбокомпресор для двигуна внутрішнього згоряння мобільної машини
Номер патенту: 47149
Опубліковано: 25.01.2010
Автор: Топчій Сергій Іванович
МПК: F02B 41/00
Мітки: внутрішнього, турбокомпресор, згоряння, машини, двигуна, мобільної
Формула / Реферат:
Турбокомпресор для двигуна внутрішнього згоряння мобільної машини, що має середній корпус з встановленим в ньому підшипником вала турбокомпресора, вал, турбінне і компресорні колеса, встановлені на валу, ущільнення підшипникового вузла, корпуси турбіни і компресора, приєднані до середнього корпуса, який відрізняється тим, що в корпусі компресора виконано два канали, з'єднані з пневмосистемою мобільної машини, по яких стиснене повітря...
Пристрій для зупинки двигуна внутрішнього згоряння мобільної машини

Номер патенту: 43315
Опубліковано: 10.08.2009
Автори: Топчій Сергій Іванович, Морміль Анатолій Іванович
МПК: F02B 29/00
Мітки: пристрій, машини, зупинки, згоряння, внутрішнього, мобільної, двигуна
Формула / Реферат:
Пристрій для зупинки двигуна внутрішнього згоряння мобільної машини, який містить повітряну заслінку, встановлену у впускному трубопроводі двигуна на осі з важелем, пневмоциліндр з штоком, приєднаним до важеля, повітря до якого надходить від пневмосистеми мобільної машини через датчик-розподільник, з'єднаний з пневмосистемою, пневмоциліндром і вакуумним трубопроводом впускного трубопроводу, а сам датчик-розподільник має підпружинену діафрагму...
Система мащення двигуна внутрішнього згоряння мобільної машини
Номер патенту: 79489
Опубліковано: 25.06.2007
Автори: Топчій Сергій Іванович, Глуховська Ольга Владиславівна, Бешун Олексій Анатолійович, Філіппов Анатолій Захарович
МПК: F01M 1/00
Мітки: згоряння, машини, двигуна, мащення, внутрішнього, мобільної, система
Формула / Реферат:
Система мащення двигуна внутрішнього згоряння мобільної машини, що включає в себе ємкість для моторної оливи, насос подачі оливи, фільтруючі елементи, головну магістраль подачі оливи від насоса, канали і трубопровід для підведення оливи до тертьових поверхонь і турбокомпресора, яка відрізняється тим, що в неї включено зворотний клапан, встановлений між трубопроводом подачі оливи до турбокомпресора і головною магістраллю подачі оливи від...
Пристрій для вимірювання шляху мобільної сільськогосподарської машини
Номер патенту: 17381
Опубліковано: 15.04.1997
Автори: Татаров Анатолій Васильович, Носов Григорій Романович, Кінкер Михайло Григорович
МПК: G01C 22/00
Мітки: вимірювання, машини, шляху, сільськогосподарсько, мобільної, пристрій
Формула / Реферат:
1. Пристрій для вимірювання шляху мобільної сільськогосподарської машини, вміщуючий лічильний вузол та встановлене на вісі шляховимірювальне колесо з грунтозачіплювачами у вигляді замкненої пружини розтягнення, контактуючої з конечними поверхнями дисків, розі ще ними з можливістю переміщення одного із них відносно другого вздовж вісі обертання з фіксацією їх положення, який відрізняється тим, що лічильний вузол виконаний в вигляді...
Попередній патент: Спосіб виготовлення особливо щільного виробу з пористого матеріалу
Наступний патент: Електромагнітний привод клапанів газорозподільного механізму (грм) двигуна внутрішнього згоряння (двз)
Випадковий патент: Спосіб визначення локального стану кісткової тканини і пристрій для його виконання