Спосіб визначення географічних координат об’єкта
Номер патенту: 112690
Опубліковано: 26.12.2016
Автори: Харченко Володимир Петрович, Малютенко Тетяна Леонідівна, Ковалевський Едуард Олександрович

Формула / Реферат
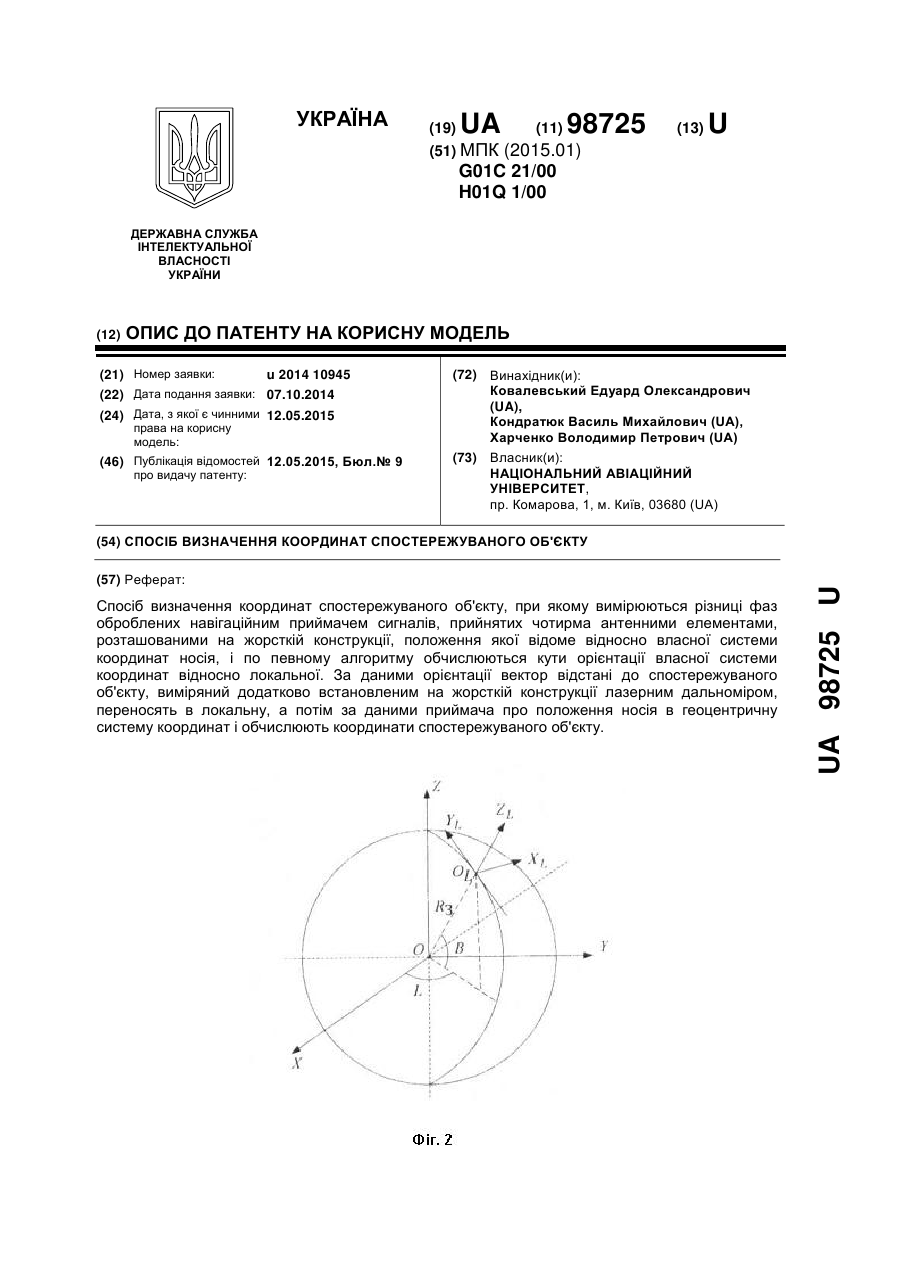
Спосіб визначення географічних координат об'єкта, при якому вимірюються різниці фаз, оброблених навігаційним приймачем сигналів, прийнятих чотирма антенними елементами, розташованими на жорсткій конструкції, положення якої відоме відносно власної системи координат носія, формалізується залежність різниць фаз на антенних елементах від орієнтації ліній між антенними елементами та відношення для визначення вектора шуканих параметрів ітераційним методом, який відрізняється тим, що змінюють вектор невідомих параметрів та по відповідно модифікованому алгоритму з використанням показників, додатково встановлених на гіроплатформі трьох гіроскопів, обчислюються географічні координати об'єкта.
Текст
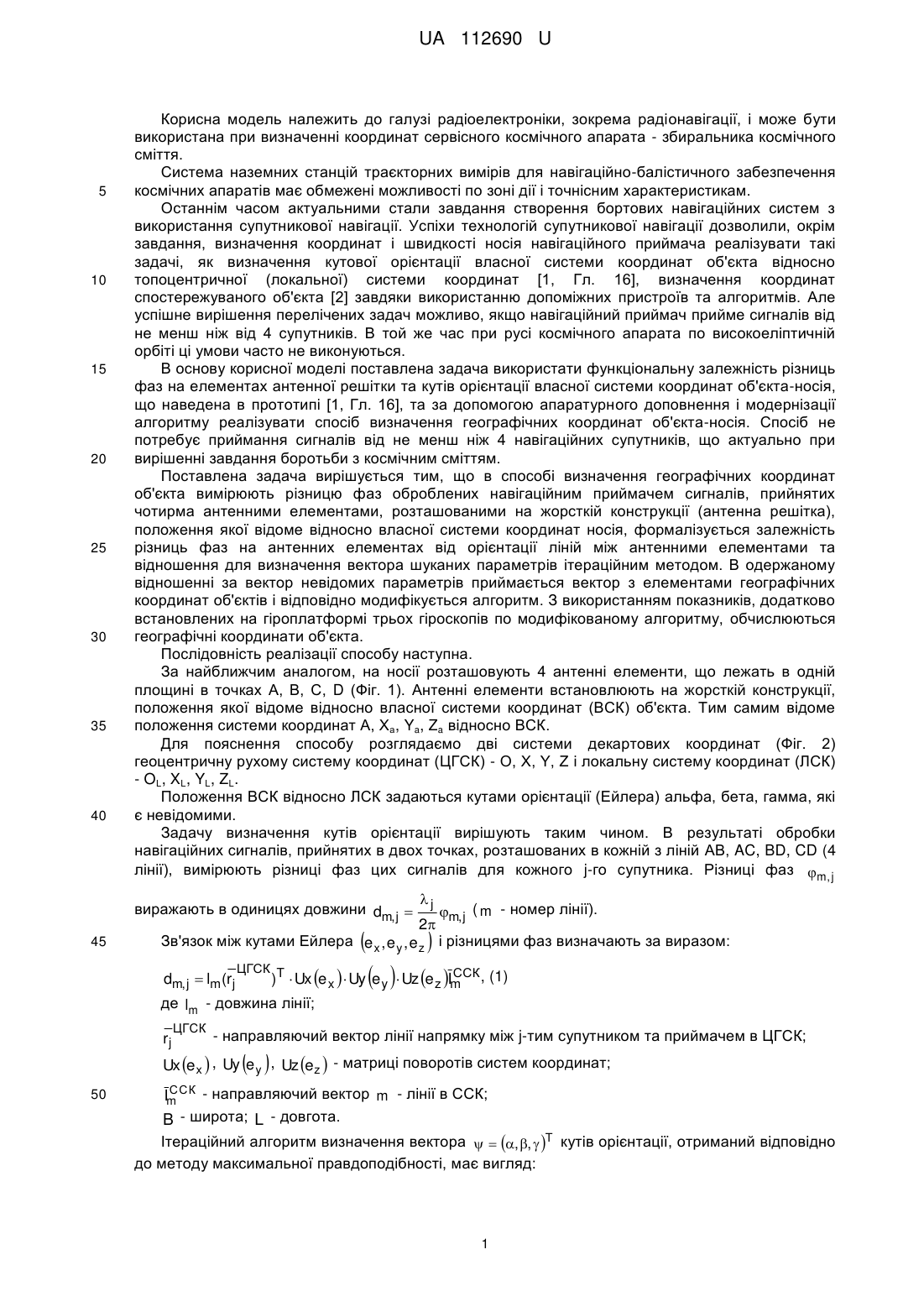
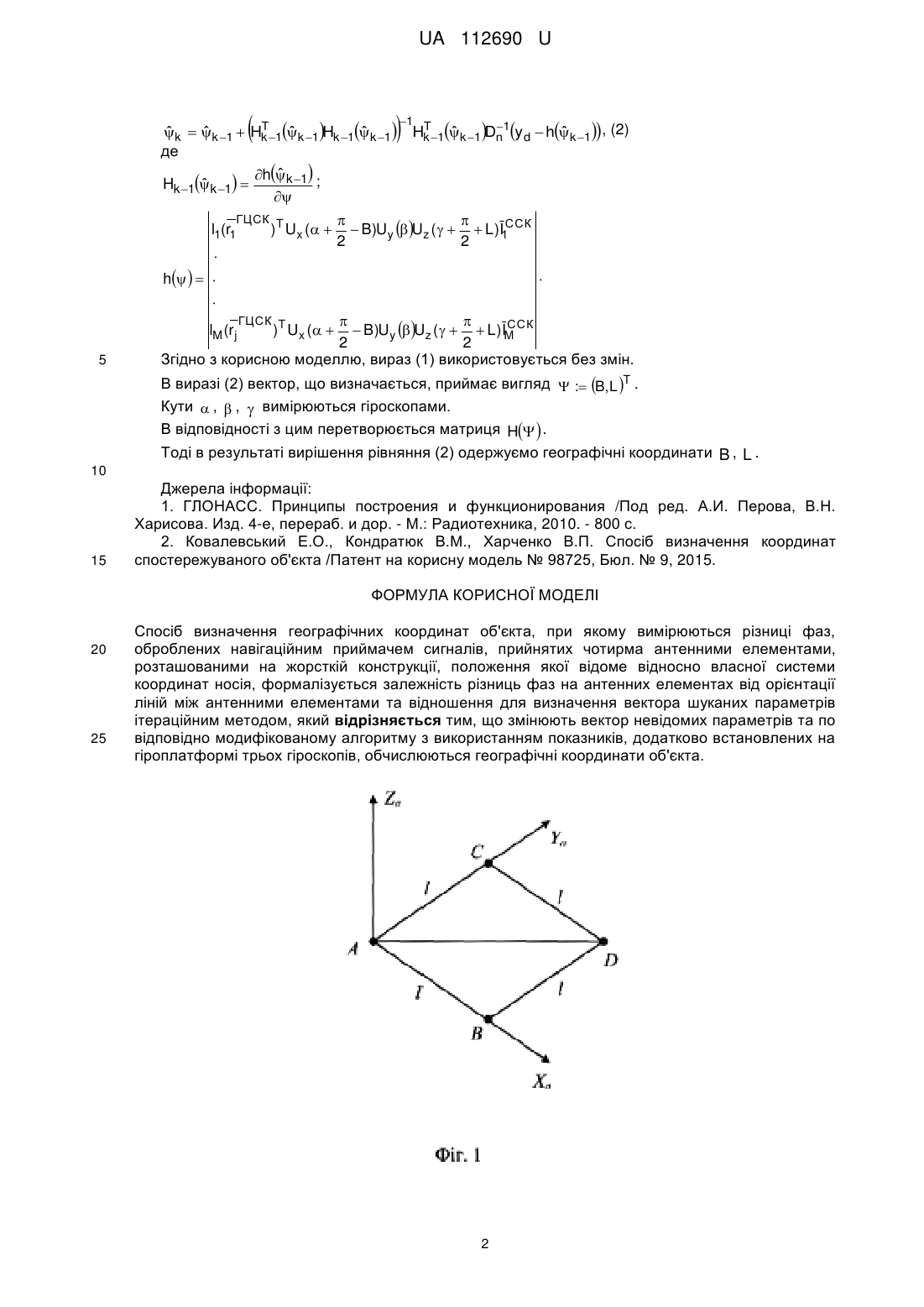
Реферат: Спосіб визначення географічних координат об'єкта включає вимірювання різниці фаз, оброблених навігаційним приймачем сигналів, прийнятих чотирма антенними елементами, розташованими на жорсткій конструкції, положення якої відоме відносно власної системи координат носія, формалізується залежність різниць фаз на антенних елементах від орієнтації ліній між антенними елементами та відношення для визначення вектора шуканих параметрів ітераційним методом. Змінюють вектор невідомих параметрів та по відповідно модифікованому алгоритму з використанням показників, додатково встановлених на гіроплатформі трьох гіроскопів, обчислюють географічні координати об'єкта. UA 112690 U (12) UA 112690 U UA 112690 U 5 10 15 20 25 30 35 40 Корисна модель належить до галузі радіоелектроніки, зокрема радіонавігації, і може бути використана при визначенні координат сервісного космічного апарата - збиральника космічного сміття. Система наземних станцій траєкторних вимірів для навігаційно-балістичного забезпечення космічних апаратів має обмежені можливості по зоні дії і точнісним характеристикам. Останнім часом актуальними стали завдання створення бортових навігаційних систем з використання супутникової навігації. Успіхи технологій супутникової навігації дозволили, окрім завдання, визначення координат і швидкості носія навігаційного приймача реалізувати такі задачі, як визначення кутової орієнтації власної системи координат об'єкта відносно топоцентричної (локальної) системи координат [1, Гл. 16], визначення координат спостережуваного об'єкта [2] завдяки використанню допоміжних пристроїв та алгоритмів. Але успішне вирішення перелічених задач можливо, якщо навігаційний приймач прийме сигналів від не менш ніж від 4 супутників. В той же час при русі космічного апарата по високоеліптичній орбіті ці умови часто не виконуються. В основу корисної моделі поставлена задача використати функціональну залежність різниць фаз на елементах антенної решітки та кутів орієнтації власної системи координат об'єкта-носія, що наведена в прототипі [1, Гл. 16], та за допомогою апаратурного доповнення і модернізації алгоритму реалізувати спосіб визначення географічних координат об'єкта-носія. Спосіб не потребує приймання сигналів від не менш ніж 4 навігаційних супутників, що актуально при вирішенні завдання боротьби з космічним сміттям. Поставлена задача вирішується тим, що в способі визначення географічних координат об'єкта вимірюють різницю фаз оброблених навігаційним приймачем сигналів, прийнятих чотирма антенними елементами, розташованими на жорсткій конструкції (антенна решітка), положення якої відоме відносно власної системи координат носія, формалізується залежність різниць фаз на антенних елементах від орієнтації ліній між антенними елементами та відношення для визначення вектора шуканих параметрів ітераційним методом. В одержаному відношенні за вектор невідомих параметрів приймається вектор з елементами географічних координат об'єктів і відповідно модифікується алгоритм. З використанням показників, додатково встановлених на гіроплатформі трьох гіроскопів по модифікованому алгоритму, обчислюються географічні координати об'єкта. Послідовність реалізації способу наступна. За найближчим аналогом, на носії розташовують 4 антенні елементи, що лежать в одній площині в точках А, В, С, D (Фіг. 1). Антенні елементи встановлюють на жорсткій конструкції, положення якої відоме відносно власної системи координат (ВСК) об'єкта. Тим самим відоме положення системи координат А, Ха, Ya, Za відносно ВСК. Для пояснення способу розглядаємо дві системи декартових координат (Фіг. 2) геоцентричну рухому систему координат (ЦГСК) - О, Χ, Υ, Ζ і локальну систему координат (ЛСК) - OL, XL, YL, ZL. Положення ВСК відносно ЛСК задаються кутами орієнтації (Ейлера) альфа, бета, гамма, які є невідомими. Задачу визначення кутів орієнтації вирішують таким чином. В результаті обробки навігаційних сигналів, прийнятих в двох точках, розташованих в кожній з ліній АВ, AC, BD, CD (4 лінії), вимірюють різниці фаз цих сигналів для кожного j-го супутника. Різниці фаз m, j виражають в одиницях довжини dm, j 45 j 2 m, j ( m - номер лінії). Зв'язок між кутами Ейлера e x , e y , e z і різницями фаз визначають за виразом: ССК dm, j lm (rj )T Ux e x Uy e y Uz e z Im , (1) де lm - довжина лінії; ЦГСК rj ЦГСК - направляючий вектор лінії напрямку між j-тим супутником та приймачем в ЦГСК; Ux e x , Uy e y , Uz ez - матриці поворотів систем координат; 50 ССК - направляючий вектор Im m- лінії в ССК; - широта; L - довгота. B Ітераційний алгоритм визначення вектора , , T кутів орієнтації, отриманий відповідно до методу максимальної правдоподібності, має вигляд: 1 UA 112690 U 5 1 T T ˆ ˆ ˆ ˆ ˆ ˆ k k 1 Hk 1k 1Hk 1k 1 Hk 1k 1Dn1yd hk 1 , (2) де ˆ hk 1 ; ˆ Hk 1k 1 ГЦСК T ССК l1(r1 ) Ux ( B)Uy Uz ( L )I1 2 2 h ГЦСК T ССК lM (rj ) Ux ( B)Uy Uz ( L )IM 2 2 Згідно з корисною моделлю, вираз (1) використовується без змін. В виразі (2) вектор, що визначається, приймає вигляд : B, L T . Кути , , вимірюються гіроскопами. В відповідності з цим перетворюється матриця H . Тоді в результаті вирішення рівняння (2) одержуємо географічні координати B , L . 10 15 Джерела інформації: 1. ГЛОНАСС. Принципы построения и функционирования /Под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е, перераб. и дор. - М.: Радиотехника, 2010. - 800 с. 2. Ковалевський Е.О., Кондратюк В.М., Харченко В.П. Спосіб визначення координат спостережуваного об'єкта /Патент на корисну модель № 98725, Бюл. № 9, 2015. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 Спосіб визначення географічних координат об'єкта, при якому вимірюються різниці фаз, оброблених навігаційним приймачем сигналів, прийнятих чотирма антенними елементами, розташованими на жорсткій конструкції, положення якої відоме відносно власної системи координат носія, формалізується залежність різниць фаз на антенних елементах від орієнтації ліній між антенними елементами та відношення для визначення вектора шуканих параметрів ітераційним методом, який відрізняється тим, що змінюють вектор невідомих параметрів та по відповідно модифікованому алгоритму з використанням показників, додатково встановлених на гіроплатформі трьох гіроскопів, обчислюються географічні координати об'єкта. 2 UA 112690 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKovalenko Eduard Oleksandrovych, Maliutenko Tetiana Leonidivna, Kharchenko Volodymyr Petrovych
Автори російськоюКовалевский Эдуард Александрович, Малютенко Татьяна Леонидовна, Харченко Владимир Петрович
МПК / Мітки
МПК: G01C 19/00, H01Q 1/00, G01C 21/00
Мітки: визначення, координат, спосіб, географічних, об'єкта
Код посилання
<a href="https://ua.patents.su/5-112690-sposib-viznachennya-geografichnikh-koordinat-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення географічних координат об’єкта</a>
Спосіб визначення координат спостережуваного об’єкту
Номер патенту: 98725
Опубліковано: 12.05.2015
Автори: Ковалевський Едуард Олександрович, Кондратюк Василь Михайлович, Харченко Володимир Петрович
МПК: G01C 21/00, H01Q 1/00
Мітки: спосіб, визначення, спостережуваного, об'єкту, координат
Формула / Реферат:
Спосіб визначення координат спостережуваного об'єкту, при якому вимірюються різниці фаз оброблених навігаційним приймачем сигналів, прийнятих чотирма антенними елементами, розташованими на жорсткій конструкції, положення якої відоме відносно власної системи координат носія, і по певному алгоритму обчислюються кути орієнтації власної системи координат відносно локальної, який відрізняється тим, що за даними орієнтації вектор відстані до...
Спосіб визначення протяжності та географічних координат рубежу прикриття об’єкта охорони
Номер патенту: 32100
Опубліковано: 12.05.2008
Автори: Купрієнко Дмитро Анатолійович, Лисий Микола Іванович, Міхєєв Борис Миколайович, Шинкарук Олег Миколайович
МПК: G08B 13/02
Мітки: визначення, координат, охорони, рубежу, об'єкта, спосіб, географічних, прикриття, протяжності
Формула / Реферат:
Спосіб визначення протяжності та географічних координат рубежуприкриття об'єкта охорони, який включає сигналізаційний прилад з однимчутливим елементом, що забезпечує визначення факту і часу порушеннярубежу охорони, який відрізняється тим, що застосовується дальномірнийсигналізаційний прилад з двома чутливими елементами, які встановлюють намісцевості паралельно у дві лінії з одночасною їх топографічною...
Спосіб визначення географічних координат транспортних засобів відносно базових станцій
Номер патенту: 39325
Опубліковано: 25.02.2009
Автори: Генькин Яків Ізраілович, Строітєлєв Віталій Петрович
МПК: G08B 25/00, G08G 1/127, B60R 25/00
Мітки: транспортних, координат, спосіб, базових, визначення, станцій, відносної, засобів, географічних
Формула / Реферат:
1. Спосіб визначення географічних координат транспортних засобів відносно базових станцій, який відрізняється тим, щоa) на транспортному засобі встановлюють щонайменше один бортовий комплекс, який приймає щонайменше один сигнал, який генерується щонайменше однією базовою станцією мобільного зв'язку,b) отримавши згаданий сигнал, бортовий комплекс визначає параметри базової станції, а саме: номер базової станції та номер пелюстка...
Спосіб автоматизованого складання карт вимірювальних величин з прив’язкою до географічних координат
Номер патенту: 45444
Опубліковано: 15.04.2002
Автор: Бьоттінгер Штефан
МПК: G01C 21/20
Мітки: прив'язкою, вимірювальних, карт, спосіб, величин, автоматизованого, складання, координат, географічних
Формула / Реферат:
1. Спосіб автоматизованого складання карт вимірювальних величин з прив'язкою до географічних координат, особливо величин врожайності сільгоспкультур, які вимірюють на певній ділянці, зокрема уздовж смуг руху в окремих вимірювальних позиціях за допомогою пристрою для вимірів, наприклад, збиральної машини, причому за зазначеними вимірювальними позиціями обчислюють найкраще можливе наближення до проходження лінії межі ділянки і потім з...
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Карпов Анатолій Стєпановіч, Ковалєвскій Міхаіл Марковіч, Іванов Робєрт Константіновіч, Рачук Владімір Сєргєєвіч, Монахов Юрій Владіміровіч, Борісов Андрєй Владіміровіч
МПК: G01S 5/04, G01S 5/00, G01S 5/02
Мітки: варіанти, навігаційної, осей, базової, визначення, об'єкта, інерціальної, системі, координат, положення, відносної, спосіб
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Попередній патент: Фасадна ручка
Наступний патент: Комбінований перетворювач обертового прискорення в переміщення
Випадковий патент: Спосіб стабілізації аторвастатину та фармацевтична композиція