Спосіб визначення координат спостережуваного об’єкту
Номер патенту: 98725
Опубліковано: 12.05.2015
Автори: Харченко Володимир Петрович, Кондратюк Василь Михайлович, Ковалевський Едуард Олександрович

Формула / Реферат
Спосіб визначення координат спостережуваного об'єкту, при якому вимірюються різниці фаз оброблених навігаційним приймачем сигналів, прийнятих чотирма антенними елементами, розташованими на жорсткій конструкції, положення якої відоме відносно власної системи координат носія, і по певному алгоритму обчислюються кути орієнтації власної системи координат відносно локальної, який відрізняється тим, що за даними орієнтації вектор відстані до спостережуваного об'єкту, виміряний додатково встановленим на жорсткій конструкції лазерним дальноміром, переносять в локальну, а потім за даними приймача про положення носія в геоцентричну систему координат і обчислюють координати спостережуваного об'єкту.
Текст
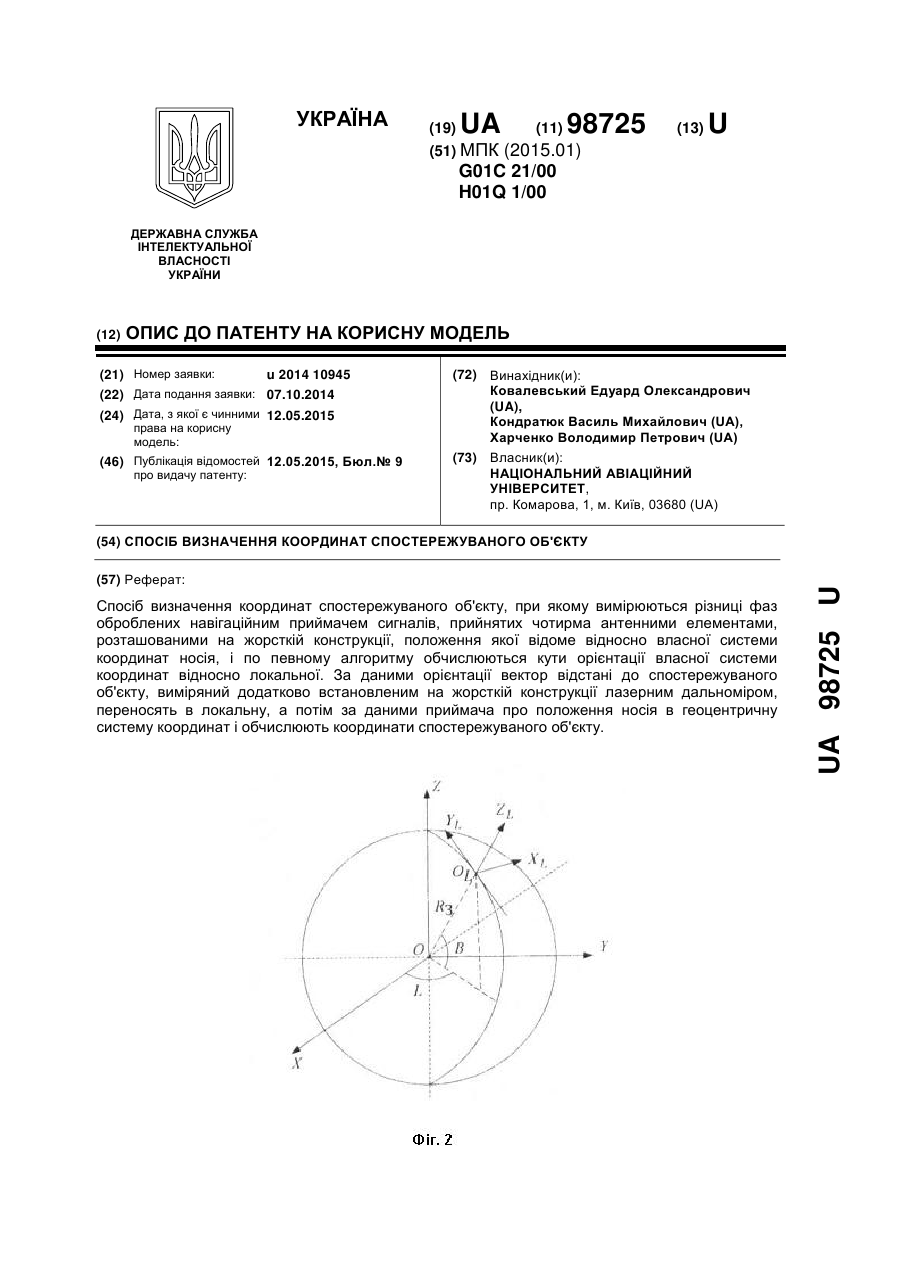
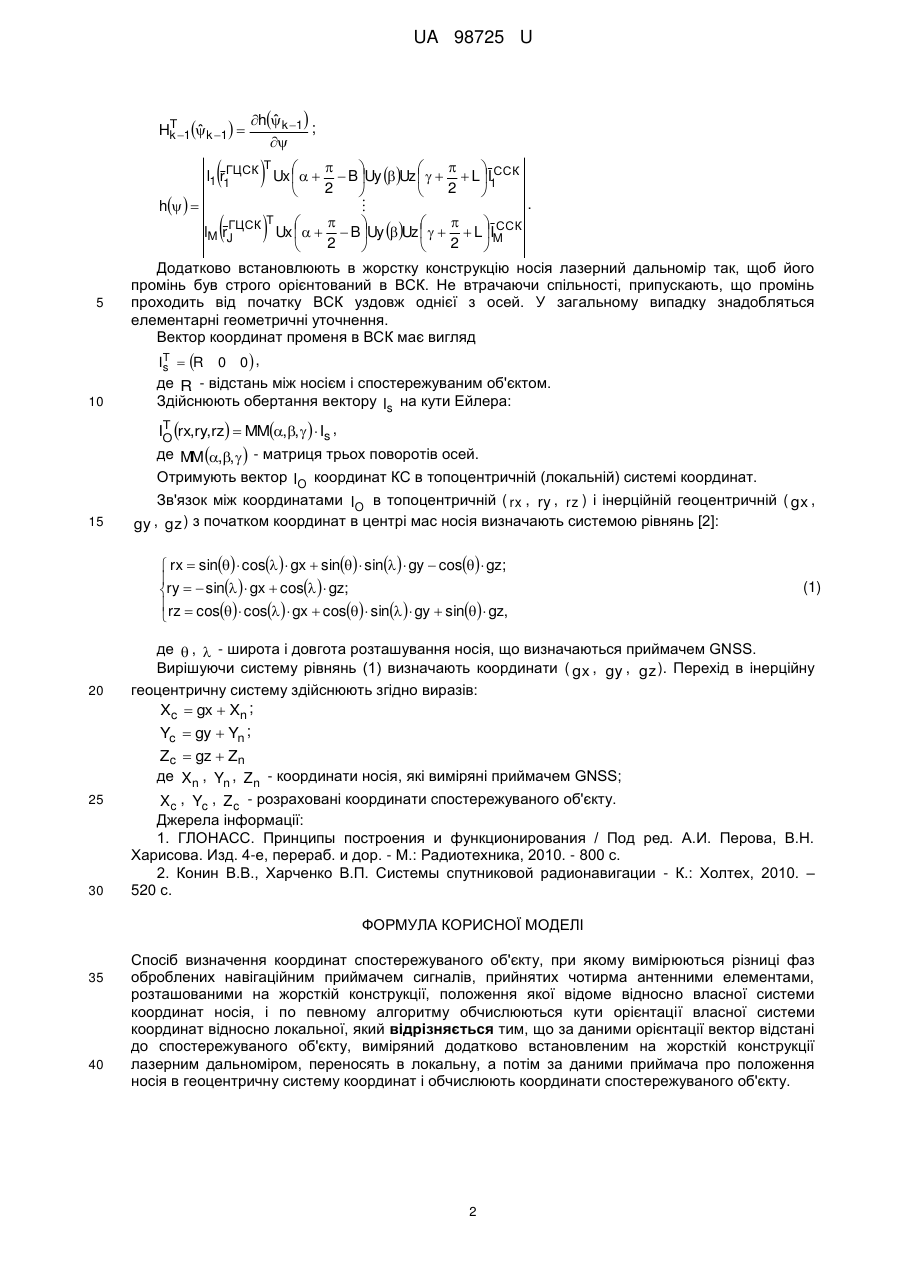
Реферат: Спосіб визначення координат спостережуваного об'єкту, при якому вимірюються різниці фаз оброблених навігаційним приймачем сигналів, прийнятих чотирма антенними елементами, розташованими на жорсткій конструкції, положення якої відоме відносно власної системи координат носія, і по певному алгоритму обчислюються кути орієнтації власної системи координат відносно локальної. За даними орієнтації вектор відстані до спостережуваного об'єкту, виміряний додатково встановленим на жорсткій конструкції лазерним дальноміром, переносять в локальну, а потім за даними приймача про положення носія в геоцентричну систему координат і обчислюють координати спостережуваного об'єкту. UA 98725 U (54) СПОСІБ ВИЗНАЧЕННЯ КООРДИНАТ СПОСТЕРЕЖУВАНОГО ОБ'ЄКТУ UA 98725 U UA 98725 U 5 10 15 20 25 30 35 40 Корисна модель належить до галузі радіоелектроніки, зокрема радіонавігації, і може бути використано при визначенні координат космічного сміття (КС) сервісним космічним апаратом (КА). При великому позитивному досвіді забезпечення навігації КА системою наземних станцій траєкторних вимірів, є складнощі її застосуванні. Система має обмежені можливості по зоні дії і точносним характеристикам. З причини наземного базування потрібно канал зв'язку для передачі координат космічного сміття на сервісний космічний апарат. Останнім часом актуальними стали завдання створення бортових навігаційних систем з використання супутникової навігації. Успіхи технологій супутникової навігації дозволили окрім завдання визначення координат і швидкості носія навігаційного приймача реалізувати задачу визначення кутової орієнтації власної системи координат об'єкту відносно гомоцентричної (локальної) системи координат [1, Гл. 16]. В основу корисної моделі поставлена задача використати результати розрахунку кутів орієнтації власної системи координат об'єкту-носія та за допомогою апаратурно-алгоритмічного доповнення реалізувати спосіб визначення координат спостережуваного об'єкту, що актуально при вирішенні завдання боротьби з космічним сміттям. Поставлена задача вирішується тим, що у способі визначення координат спостережуваного об'єкту, при якому вимірюються різниці фаз оброблених навігаційним приймачем сигналів, прийнятих чотирма антенними елементами, розташованими на жорсткій конструкції, положення якої відоме відносно власної системи координат носія, і по певному алгоритму обчислюються кути орієнтації власної системи координат відносно локальної, згідно з винаходом за даними орієнтації вектор відстані до спостережуваного об'єкту, виміряний додатково встановленим на жорсткій конструкції лазерним дальноміром, переносять в локальну, а потім за даними приймача про положення носія в геоцентричну систему координат і обчислюють координати спостережуваного об'єкту. Винахід ілюструється Фіг. 1 - Схема розташування антенних елементів пристрою визначення кутової орієнтації; Фіг. 2 - Локальна система координат. Послідовність реалізації способу наступна. На носії розташовують 4 антенні елементи, що лежать в одній площині в точках А, В, С, D (Фіг. 1). Антенні елементи встановлюють на жорсткій конструкції, положення якої відоме відносно власної системи координат (ВСК) об'єкту. Тим самим відоме положення системи координат А, Ха, Ya, Za відносно ВСК. Для ілюстрації способу розглядають дві системи декартових координат (Фіг. 2) геоцентричну рухому систему координат (ЦГСК) - О, X, Y, Z і локальну систему координат (ЛСК) - OL, XL, YL, ZL. Положення ВСК відносно ЛСК задають кутами орієнтації (Ейлера) альфа, бета, гамма, які є шуканими. Задачу визначення кутів орієнтації вирішують таким чином. В результаті обробки навігаційних сигналів, прийнятих в двох точках, розташованих в кожній з ліній АВ, AC, BD, CD (4 лінії), вимірюють різниці фаз цих сигналів для кожного j-гo супутника. Різниці фаз m, j виражають в одиницях довжини dm, j j m, j ( m - номер лінії). 2 Зв'язок між кутами Ейлера ( e x , e y , e z ) і різницями фаз визначають за виразом: Т CCК dm, j lm rjЦГСК Ux e x Uy e y Uz e z Im , 45 де lm - довжина лінії; r ЦГСК - направляючий вектор лінії напрямку між j-тим супутником та приймачем в ЦГСК; j Ux Uy Uz - матриці поворотів систем координат; CCК - направляючий вектор m-лінії в ССК; Im e x / 2 B , e y , ez / 2 L ; 50 B , L - широта і довгота КА відповідно. T Ітераційний алгоритм визначення вектору ψ=(α,β,γ) кутів орієнтації, отриманий відповідно до методу максимальної правдоподібності, має вигляд: T ˆ ˆ ˆ ˆ k k 1 Hk 1k 1Hk 1k 1 де 1 T Hk 1 ˆ ˆ k 1Dn1y d hk 1 , 1 UA 98725 U T ˆ Hk 1k 1 ˆ hk 1 ; ССК ГЦСК Т l1 r1 Ux B Uy Uz L I1 2 2 . h Т ССК ГЦСК lМ rJ Ux B Uy Uz L IM 2 2 5 10 15 Додатково встановлюють в жорстку конструкцію носія лазерний дальномір так, щоб його промінь був строго орієнтований в ВСК. Не втрачаючи спільності, припускають, що промінь проходить від початку ВСК уздовж однієї з осей. У загальному випадку знадобляться елементарні геометричні уточнення. Вектор координат променя в ВСК має вигляд IT R 0 0 , s де R - відстань між носієм і спостережуваним об'єктом. Здійснюють обертання вектору Is на кути Ейлера: T IO rx,ry,rz MM,, Is , де MM ,, - матриця трьох поворотів осей. Отримують вектор IO координат КС в топоцентричній (локальній) системі координат. Зв'язок між координатами IO в топоцентричній ( rx , ry , rz ) і інерційній геоцентричній ( gx , gy , gz ) з початком координат в центрі мас носія визначають системою рівнянь [2]: rx sin cos gx sin sin gy cos gz; ry sin gx cos gz; rz cos cos gx cos sin gy sin gz, 20 25 30 (1) де , - широта і довгота розташування носія, що визначаються приймачем GNSS. Вирішуючи систему рівнянь (1) визначають координати ( gx , gy , gz ). Перехід в інерційну геоцентричну систему здійснюють згідно виразів: Xc gx Xn ; Yc gy Yn ; Zc gz Zn де Xn , Yn , Zn - координати носія, які виміряні приймачем GNSS; Xc , Yc , Z c - розраховані координати спостережуваного об'єкту. Джерела інформації: 1. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е, перераб. и дор. - М.: Радиотехника, 2010. - 800 с. 2. Конин В.В., Харченко В.П. Системы спутниковой радионавигации - К.: Холтех, 2010. – 520 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 Спосіб визначення координат спостережуваного об'єкту, при якому вимірюються різниці фаз оброблених навігаційним приймачем сигналів, прийнятих чотирма антенними елементами, розташованими на жорсткій конструкції, положення якої відоме відносно власної системи координат носія, і по певному алгоритму обчислюються кути орієнтації власної системи координат відносно локальної, який відрізняється тим, що за даними орієнтації вектор відстані до спостережуваного об'єкту, виміряний додатково встановленим на жорсткій конструкції лазерним дальноміром, переносять в локальну, а потім за даними приймача про положення носія в геоцентричну систему координат і обчислюють координати спостережуваного об'єкту. 2 UA 98725 U Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKovalenko Eduard Oleksandrovych, Kondratiuk Vasyl Mykhailovych, Kharchenko Volodymyr Petrovych
Автори російськоюКовалевский Эдуард Александрович, Кондратюк Василий Михайлович, Харченко Владимир Петрович
МПК / Мітки
МПК: H01Q 1/00, G01C 21/00
Мітки: координат, визначення, спосіб, об'єкту, спостережуваного
Код посилання
<a href="https://ua.patents.su/5-98725-sposib-viznachennya-koordinat-sposterezhuvanogo-obehktu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення координат спостережуваного об’єкту</a>
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Іванов Робєрт Константіновіч, Ковалєвскій Міхаіл Марковіч, Карпов Анатолій Стєпановіч, Монахов Юрій Владіміровіч, Рачук Владімір Сєргєєвіч, Борісов Андрєй Владіміровіч
МПК: G01S 5/04, G01S 5/00, G01S 5/02
Мітки: осей, варіанти, визначення, інерціальної, базової, відносної, спосіб, навігаційної, координат, об'єкта, системі, положення
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Спосіб визначення координат точок на земній поверхні
Номер патенту: 81303
Опубліковано: 25.12.2007
Автори: Шевченко Тарас Георгійович, Третяк Корнилій Романович, Глотов Володимир Миколайович
Мітки: поверхні, спосіб, визначення, точок, земній, координат
Формула / Реферат:
Спосіб визначення координат точок на земній поверхні, який полягає у тому, що встановлюють пристрій для закріплення антени GPS-приймача, встановлюють антену GPS-приймача і центрують її над закріпленою на земній поверхні точкою, з'єднують між собою елементи GPS-станції (систему живлення, приймач і антену), орієнтують антену, здійснюють ініціалізацію і виконують вимірювання, який відрізняється тим, що, за наявності перешкоди, антену...
Спосіб визначення координат та орієнтації осі свердловини

Номер патенту: 31185
Опубліковано: 15.12.2000
Автори: Рудик Юрій Микитович, Карпачов Юрій Андрійович, Анупрієнко Генадій Єфремович
МПК: E21B 47/02, G01C 9/00
Мітки: спосіб, визначення, свердловини, осі, орієнтації, координат
Текст:
...: i i i (2 ) (2 ) j ic = - cosb ( 2 ) sina ( 2) i i i i (2 ) cos b ( 2 ) cos a ( 2 ) j i i i + (2 ) sinb ( 2 ) k i . i (4) + + Із виразу (4) отримуєм вираз для вектора (поворот нанавколо осі O iO i+ 1 : ( 2) ( 2) æ O iOi + 1 = R jic = ç - cos b ( 2 ) sin a ( 2 ) ii + i i è вісью O iz( 2 ) жорстко зв'язаною з возиком 2. i При цьому створюється система координат O ix( 2) y( 2 ) z( 2) (див. фіг. 2), де вісь Oi y( 2 ) направлеik ic ic ic ...
Спосіб gps-визначення координат рухомого об’єкта
Номер патенту: 82794
Опубліковано: 12.05.2008
Автори: Надточій Олександр Володимирович, Бурачек Всеволод Германович, Мамонтова Людмила Степанівна, Боровий Валентин Олександрович
МПК: G01B 7/004
Мітки: координат, рухомого, об'єкта, спосіб, gps-визначення
Формула / Реферат:
Спосіб GPS-визначення координат рухомого об'єкта, що заснований на одночасному визначенні координат групою антен GPS-приймачів при їх розосередженні, який відрізняється тим, що з антен GPS-приймачів формують горизонтальну шкалу-лінійку з визначеними інтервалами, при цьому при маневруванні об'єкта поздовжню вісь шкали-лінійки повертають навколовертикальної осі та утримують лінію, що з'єднує центри антен, під кутом
Спосіб визначення просторових координат центра проекції знімальної камери
Номер патенту: 78826
Опубліковано: 25.04.2007
Автор: Глотов Володимир Миколайович
МПК: G01C 11/00
Мітки: визначення, центра, камери, проекції, знімальної, координат, просторових, спосіб
Формула / Реферат:
Спосіб визначення просторових координат центра проекції знімальної камери, який полягає в тому, що на земній поверхні в районі знімання встановлюють GPS-приймач, а на борту рухомого об'єкта встановлюють знімальну камеру і бортовий GPS-приймач, з'єднують їх між собою, приймають сигнали з бортового GPS-приймача і керують знімальною камерою, який відрізняється тим, що попередньо на бортовому GPS-приймачі встановлюють епохи, які відповідають...
Попередній патент: Спосіб позиціонування за інформацією системи попередження зіткнень літаків
Наступний патент: Авіаційний космічний комплекс
Випадковий патент: Спосіб одержання 22(r,s)-11 beta, 21-дігідроксі16-alрha, 17-бутіліденбісоксіпрена-1, 4-дієн-3, 20-діона