Система повороту і стабілізації головного світла наземного транспортного засобу у горизонтальній площині з нейроконтролером
Номер патенту: 113075
Опубліковано: 10.01.2017

Формула / Реферат
Система повороту і стабілізації головного світла наземного транспортного засобу у горизонтальній площині з нейроконтролером, що складається з датчиків кута повороту рульового колеса та швидкості, які передають напругу кута до AFS-контролера через електронний блок керування, на виході якого виникає напруга керування, яка подається до електродвигуна, що діє на механізм повороту оптичного елементу з установленим в ньому оптичним елементом, яка відрізняється тим, що в неї додатково встановлений транспортний портал, який разом з датчиками кута повороту рульового колеса та швидкості утворює кут повороту, нейроконтролер, який приймає сигнали з датчиків кута повороту рульового колеса та швидкості та транспортного порталу, який виконує функції електронного блока керування та AFS-контролера, а також зворотні зв'язки по датчику кутової швидкості, датчику кута повороту механізму повороту оптичного елемента у горизонтальній площині, які відновлюють інформацію про поворот кута шляхом корегування кутів, отриманих від датчиків кута повороту рульового колеса та швидкості та транспортного порталу.
Текст
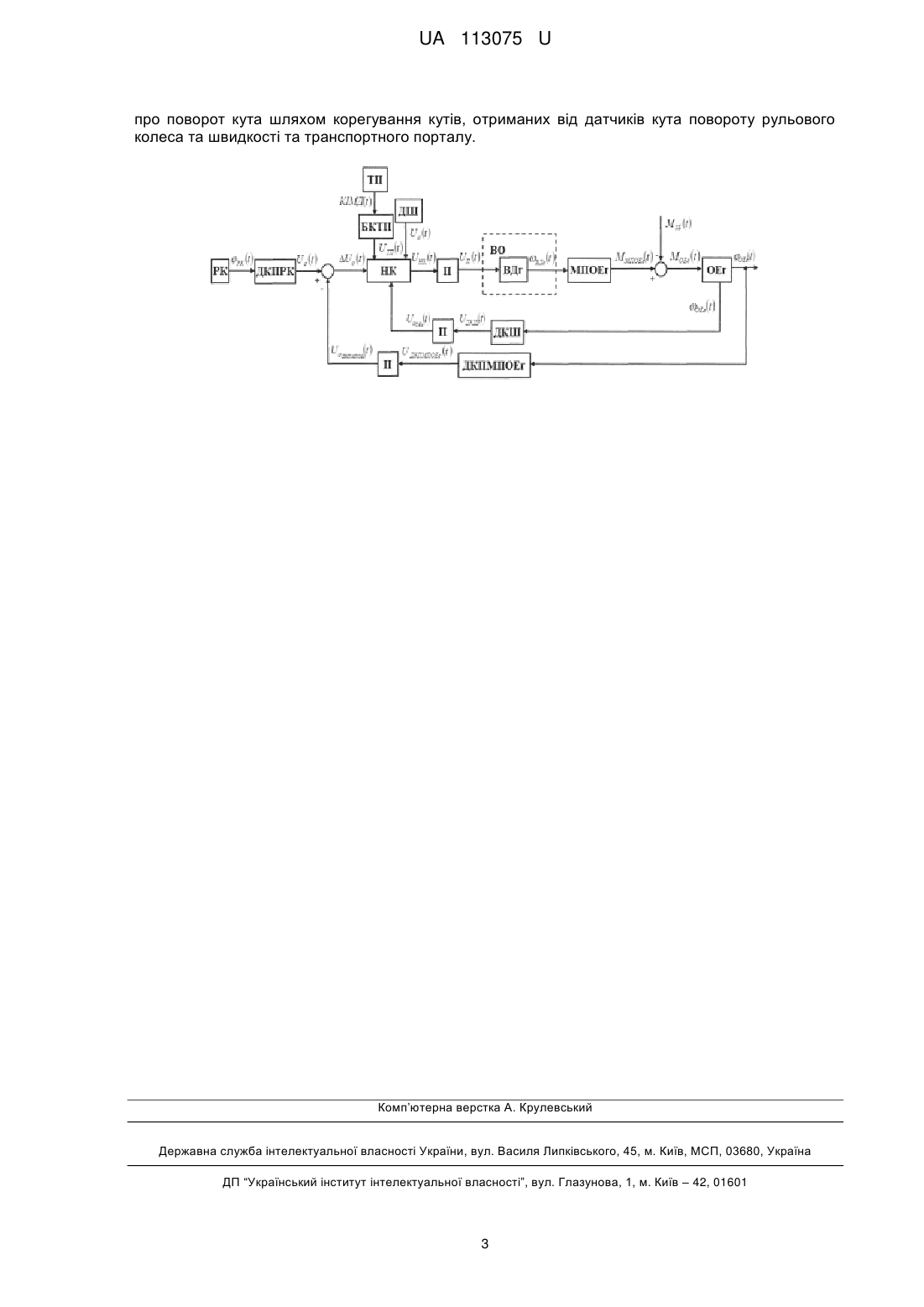
Реферат: Система повороту і стабілізації головного світла наземного транспортного засобу у горизонтальній площині з нейроконтролером складається з датчиків кута повороту рульового колеса та швидкості, які передають напругу кута до AFS-контролера через електронний блок керування, на виході якого виникає напруга керування, яка подається до електродвигуна, що діє на механізм повороту оптичного елемента з установленим в ньому оптичним елементом. Додатково встановлений транспортний портал, який, разом з датчиками кута повороту рульового колеса та швидкості, утворює кут повороту, нейроконтролер, який приймає сигнали з датчиків кута повороту рульового колеса та швидкості та транспортного порталу. UA 113075 U (12) UA 113075 U UA 113075 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі машинобудування, зокрема до систем керування адаптивною системою головного світла наземного транспортного засобу (НТЗ), і може бути використана при обґрунтуванні будь-яких заходів з підвищення ефективності освітлення НТЗ дороги. Найбільш близька до запропонованої корисної моделі за конструкцією є вибрана як ® прототип VARILIS Architecture for Xenon technology with Xenon 5 electronic ballast / AFS control unit: [Technical Information/ Electronics-Lighting Electronics, Hella, p. 10, http://www.billavista.com/atv/PDFIndex/files/Electrical/Hella%20Electronics %20-%20Technical% 20Information%20-%20Relays.pdf], в основі цієї системи знаходиться структурна схема, завдяки якій світлотіньова межа базується на системі датчиків, крокових двигунів, CAN-шини, LIN-шини, блока управління. У кожному окремому блоці розглянутої схеми вирішуються окремі задачі ® управління фарою, керуюча електроніка для всіх функцій VARILIS і електроніка для роботи Xenon HID лампи поєднуються. Блок управління Xenon 5 працює в залежності від збільшення потужності ксенонових ламп HID для збільшення світлового потоку. Завдяки використанню крокових двигунів, які підключаються до блока управління через LIN-шину реалізується модульна система. Ця концепція робить використання одного і того ж блока управління фарами різного виду можливим. Інтерфейс електричної системи НТЗ залишається таким же самим для всіх варіантів фар. Завдяки вищенаведеному конструкція є компактною, використовуються мінімальні витрати проводки у фарі і відбувається контроль статичного вигину проміння світла. До недоліків розглянутої системи належить відсутність стабілізації головного світла НТЗ, тобто неможливість повністю оцінити стан дороги та забезпечити оптимальне стабільне освітлення дороги. В основу запропонованої корисної моделі поставлено задачу вдосконалення системи повороту і стабілізації головного світла НТЗ у горизонтальній площині з нейроконтролером, для чого використовуються транспортний портал (ТП), нейроконтролер (НК) та зворотні зв'язки по датчику кутової швидкості, датчику кута повороту механізму повороту оптичного елемента у горизонтальній площині (ДКПМПОЕг), що поліпшують поворот і стабілізацію головного світла НТЗ у горизонтальній площині за рахунок постійно відновлюваної інформації, яка корегується при русі НТЗ. Поставлена задача вирішується тим, що у систему повороту і стабілізації головного світла (нтз) у горизонтальній площині з нейроконтролером, що складається з датчиків кута повороту рульового колеса та швидкості, які передають напругу кута до AFS-контролера через електронний блок керування, на виході якого виникає напруга керування, яка подається до електродвигуна, що діє на механізм повороту оптичного елемента з установленим в ньому оптичним елементом, відповідно до корисної моделі, додатково встановлюються транспортний портал, який разом з датчиками кута повороту рульового колеса та швидкості утворює кут повороту, нейроконтролер, який приймає сигнали з датчиків кута повороту рульового колеса та швидкості та транспортного порталу і виконує функції електронного блока керування та AFSконтролера, а також зворотні зв'язки по датчику кутової швидкості, ДКПМПОЕг, які відновлюють інформацію про поворот кута шляхом корегування кутів, отриманих від датчиків кута повороту рульового колеса та швидкості та ТП. На кресленні наведено функціональну схему повороту і стабілізації головного світла НТЗ у горизонтальній площині з нейроконтролером, яка працює наступним чином. Регульованою величиною системи є кут повороту оптичного елемента у горизонтальній площині ОЕг. Необхідне значення кута з задається рульовим колесом (РК), ДКПРК, ДШ та картографічною інформацією мереж доріг від ТП через електронний блок керування транспортного порталу (БКТП), які мають систему корекції. Заданий кут у вигляді напруги U подається до НК. Якщо кут повороту оптичного елемента у горизонтальній площині ОЕг дорівнює заданому куту з, то кут повороту оптичного елемента у горизонтальній площині (ОЕг) відносно осі симетрії дорівнює нулю, отже дорівнює нулю і напруга на виході ДКПРК, ДШ та ТП. ДКШ встановлений на механізмі повороту оптичного елемента у горизонтальній площині (МПОЕг). Його вісь Y-Y паралельна осі ОЕг, а вимірювальна вісь X-X паралельна осі обертання ОЕг. Сигнали ДКПРК, ДШ і ТП підсумовуються. Сумарна напруга U =UДКПМОЕг + UOEг подається через НК, на виході якого формується сигнал UHK. З НК сигнал UНК через П підсилюється UП і подається до виконавчого органа, в даній схемі це ВДг. ВДг подає на механізм повороту оптичного елемента у горизонтальній площині ВДг. ВДг створює момент стабілізації ОЕг М/МПОЕг, що протидіє зовнішньому збурюючому моменту МЗБ. При цьому забезпечується стабілізація заданого поворотом напрямку ОЕг. 1 UA 113075 U 5 10 15 20 25 30 35 40 45 Режим стабілізації досягається тоді, коли кут ОЕг дорівнює заданому і ОЕг відносно осі своїх цапф ВЦ стабілізована (ОЕг =з = const), сигнали на виході ДКПРК, ДШ та ТП дорівнюють нулю. Дорівнює нулю і обертаючий момент, що розвиває ВДг. Якщо під дією збурюючого моменту МЗБ ОЕг відхилиться від заданого кута, то статор ДКПРК повернеться відносно свого ротора на кут г= з - ОЕг. В результаті на виході ДКПРК, ДТП та ТП створюється напруга U, пропорційна куту непогодження г. Одночасно на виході ДКШ створюється напруга UOE, пропорційна кутовій швидкості OE, ОЕг. Сигнали UДКПМПОЕг і UOE підсумовуються в контурі підсумовування КП і підсилюються у блоці П. Під дією сигналів Uк ВДг починає працювати. ОЕг створює момент стабілізації МОЕг, що протидіє збурюючому моменту МЗБ, і тим самим перешкоджає подальшому збільшенню кута непогодження. При зменшенні величини збурюючого моменту МЗБ момент стабілізації МОЕг повертає ОЕг у вихідне положення і непогодженість г зменшується до нуля. Режим повороту здійснюється при повороті ОЕг, змінюючи положення НТЗ у горизонтальній площині, регулює струм в обмотках електромагніту повороту ДКПРК. Електромагніт повороту створює момент і тим самим викликає прецесійний рух (поворот) ОЕг. При русі на виході ДКПРК буде виникати напруга U, пропорційна непогодженості г. Під дією цього сигналу ВДг ОЕг починає обертати його відносно осі цапф з деякою кутовою швидкістю. При цьому на виході ДКПРК виникає напруга UOEг, пропорційна кутовій швидкості ОЕг. Результуючий сигнал U=UДКПМОЕг + UOEг датчиків кута і швидкості визначає стале значення кутової швидкості ОЕг. ОЕг буде повертатися у бік зменшення кута непогодження. Чим більше буде момент повороту, тим вище будуть швидкість прецесії і швидкість повороту ОЕг. Якщо водій змінить напрямок повороту рульового колеса, то зміниться знак моменту електромагніту повороту, а отже, і напрямок прецесії ДКПРК. ДКПРК буде повертатися у протилежний бік, що призведе до зміни на 180° фази напруги UK. Відповідно зміниться і знак моменту електромагніту керування П. Напрямок обертання ОЕг зміниться на протилежне. При поверненні водієм рульового колеса у вихідне (нейтральне) положення момент повороту, що діє на ДКПРК стає рівним нулю і поворот ОЕг припиняється. Таким чином, у режимі повороту ОЕг слідкує за ДКПРК, ДШ та ТП, тобто система стабілізації ОЕг при повороті працює як силова слідкуюча система. Напрямок руху ОЕг при повороті змінюється залежно від напрямку повороту МПОЕг, а швидкість повороту залежно від величини кута повороту рульового колеса, швидкості НТЗ та картографічної інформації мереж доріг від ТП. Запропонована корисна модель дозволяє поліпшити умови спостереження за дорогою з НТЗ: в кілька разів зростає дальність виявлення і розпізнавання дороги, пішоходів тощо, підвищується точність кута повороту у горизонтальній площині освітлення дороги, пішоходів, перехресть, поворотів тощо, зменшується розсіювання світла. При рівних умовах ймовірність стабілізації освітлення поворотів, дороги, пішоходів тощо з ходу збільшується. Таким чином, розроблена система повороту і стабілізації головного світла НТЗ у горизонтальній площині з нейроконтролером за допомогою ТП, НК, датчиків зворотного зв'язку, механізму адаптації й самонавчання в автоматичному режимі враховує постійні зміни середовища руху НТЗ, оцінює початкові характеристики і узагальнює отриману інформацію, а головне, забезпечує оптимальне стабілізоване освітлення дороги. Розроблена корисна модель може бути використана для автомобілів, НТЗ спеціального призначення, дорожніх та будівельних машин тощо. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Система повороту і стабілізації головного світла наземного транспортного засобу у горизонтальній площині з нейроконтролером, що складається з датчиків кута повороту рульового колеса та швидкості, які передають напругу кута до AFS-контролера через електронний блок керування, на виході якого виникає напруга керування, яка подається до електродвигуна, що діє на механізм повороту оптичного елемента з установленим в ньому оптичним елементом, яка відрізняється тим, що в неї додатково встановлений транспортний портал, який разом з датчиками кута повороту рульового колеса та швидкості утворює кут повороту, нейроконтролер, який приймає сигнали з датчиків кута повороту рульового колеса та швидкості та транспортного порталу, який виконує функції електронного блока керування та AFS-контролера, а також зворотні зв'язки по датчику кутової швидкості, датчику кута повороту механізму повороту оптичного елемента у горизонтальній площині, які відновлюють інформацію 2 UA 113075 U про поворот кута шляхом корегування кутів, отриманих від датчиків кута повороту рульового колеса та швидкості та транспортного порталу. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F21S 2/00, B60Q 1/06, B60Q 1/04, B60Q 1/00
Мітки: транспортного, система, нейроконтролером, площині, повороту, світла, засобу, стабілізації, наземного, головного, горизонтальний
Код посилання
<a href="https://ua.patents.su/5-113075-sistema-povorotu-i-stabilizaci-golovnogo-svitla-nazemnogo-transportnogo-zasobu-u-gorizontalnijj-ploshhini-z-nejjrokontrolerom.html" target="_blank" rel="follow" title="База патентів України">Система повороту і стабілізації головного світла наземного транспортного засобу у горизонтальній площині з нейроконтролером</a>
Система повороту і стабілізації головного світла транспортного засобу у вертикальній площині з нейроконтролером
Номер патенту: 113074
Опубліковано: 10.01.2017
Автор: Баранова Валентина Олегівна
МПК: F21S 2/00, B60Q 1/00, B60Q 1/04, B60Q 1/06
Мітки: стабілізації, система, головного, засобу, світла, вертикальний, нейроконтролером, повороту, площині, транспортного
Формула / Реферат:
Система повороту і стабілізації головного світла наземного транспортного засобу у вертикальній площині з нейроконтролером, що складається з датчика нахилу кузова, який передає напругу кута до AFS-контролера через електронний блок керування, на виході якого виникає напруга керування, яка подається до електродвигуна, що діє на механізм повороту оптичного елемента з установленим в ньому оптичним елементом, яка відрізняється тим, що в неї...
Інтелектуальна система головного світла транспортного засобу
Номер патенту: 99911
Опубліковано: 25.06.2015
Автори: Баранова Валентина Олегівна, Щукін Олександр Вікторович, Ніконов Олег Якович
МПК: F21S 2/00, F21W 101/00, B60Q 1/00
Мітки: головного, транспортного, інтелектуальна, система, засобу, світла
Формула / Реферат:
Інтелектуальна система головного світла транспортного засобу, що складається з датчиків, електронного блока керування та блока приводу, яка відрізняється тим, що в неї додатково встановлюються транспортний портал та GPS-система, за допомогою яких заздалегідь отримана інформація з урахуванням GPS-даних про положення транспортного засобу на дорозі та його швидкість руху передається з транспортного порталу через електронний блок керування...
Спосіб керування інтелектуальною системою головного світла транспортного засобу
Номер патенту: 99913
Опубліковано: 25.06.2015
Автори: Баранова Валентина Олегівна, Ніконов Олег Якович, Щукін Олександр Вікторович
МПК: B60Q 1/00, F21W 101/00, F21S 2/00
Мітки: системою, засобу, керування, світла, головного, інтелектуальною, транспортного, спосіб
Формула / Реферат:
Спосіб керування інтелектуальною системою головного світла транспортного засобу, який полягає у тому, що за допомогою датчиків збирають інформацію про стан руху транспортного засобу та транспортного середовища, після чого оброблена за допомогою АСПО-контролера інформація надходить в електронні блоки освітлення, який відрізняється тим, що в процесі керування враховують заздалегідь отриману інформацію від додатково встановленого транспортного...
Система автоматичного керування рухом підводного апарата в горизонтальній площині
Номер патенту: 101202
Опубліковано: 11.03.2013
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/00, B63H 25/00
Мітки: підводного, керування, рухом, площині, автоматичного, апарата, горизонтальний, система
Формула / Реферат:
Система автоматичного керування рухом підводного апарата в горизонтальній площині, яка містить задавач вхідного сигналу, датчик лінійної швидкості руху підводного апарата, датчик частоти обертання першого гребного гвинта, перший канал виконавчого механізму, що об'єднує послідовно з'єднані перший силовий перетворювач, перший електродвигун, перший гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що перший...
Система автоматизованого вибору швидкісного режиму руху наземного електричного транспортного засобу
Номер патенту: 110877
Опубліковано: 25.10.2016
Автори: Сорока Костянтин Олексійович, Личов Дмитро Олександрович
МПК: B60W 50/00, B60W 50/08
Мітки: засобу, руху, транспортного, швидкісного, автоматизованого, система, вибору, електричного, наземного, режиму
Формула / Реферат:
1. Система автоматизованого вибору швидкісного режиму руху наземного електричного транспортного засобу, що містить блок центрального процесора з підключеними до нього блоком індикації, блоком пам'яті, датчиком шляху і швидкості, датчиками напруги та струму, блок порівняння часу програмного і фактичного руху та приймально-передавальним пристроєм, який відрізняється тим, що для вибору потрібного швидкісного режиму руху від поточної точки...
Попередній патент: Система повороту і стабілізації головного світла транспортного засобу у вертикальній площині з нейроконтролером
Наступний патент: Спосіб реактивації діапаузуючих популяцій імаго синьої м’ясної мухи
Випадковий патент: Декорована огорода