Система автоматизованого вибору швидкісного режиму руху наземного електричного транспортного засобу
Номер патенту: 110877
Опубліковано: 25.10.2016
Автори: Личов Дмитро Олександрович, Сорока Костянтин Олексійович

Формула / Реферат
1. Система автоматизованого вибору швидкісного режиму руху наземного електричного транспортного засобу, що містить блок центрального процесора з підключеними до нього блоком індикації, блоком пам'яті, датчиком шляху і швидкості, датчиками напруги та струму, блок порівняння часу програмного і фактичного руху та приймально-передавальним пристроєм, який відрізняється тим, що для вибору потрібного швидкісного режиму руху від поточної точки місцезнаходження транспортного засобу до наступної зупинки, відповідно з графіком руху, при мінімально можливих витратах електричної електроенергії містить трекер супутникової навігації, датчики закриття дверей і відправлення транспортного засобу, прилади вимірювання кількості пасажирів і маси транспортного засобу, а в блок пам'яті записана оцифрована карта міста, графік руху, плановий режим руху на ділянках маршруту та програма розрахунку режиму руху і витрат електроенергії.
2. Система за п. 1, яка відрізняється тим, що бортовий комп'ютер попередньо розраховує два можливі режими руху: найбільш швидкий, з врахуванням обмежень правил руху, та повільний, найбільш економний з точки зору витрат електроенергії, визначає діапазон часу можливого прибуття на зупиночний пункт, порівнює його з графіком руху, визначає фактичний час прибуття та розраховує бажаний режим руху до наступної зупинки чи декількох зупинок до кінця маршруту.
Текст
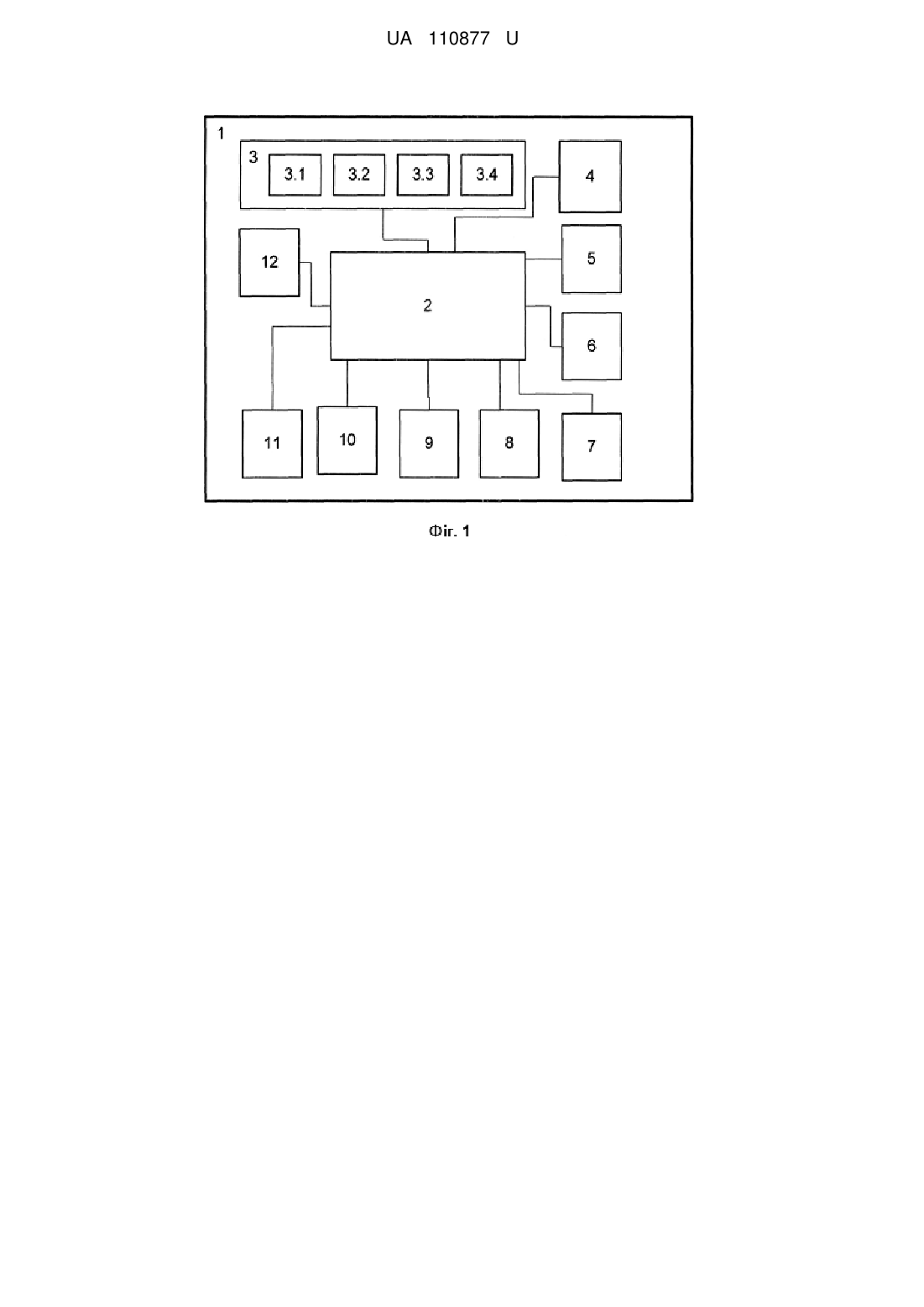
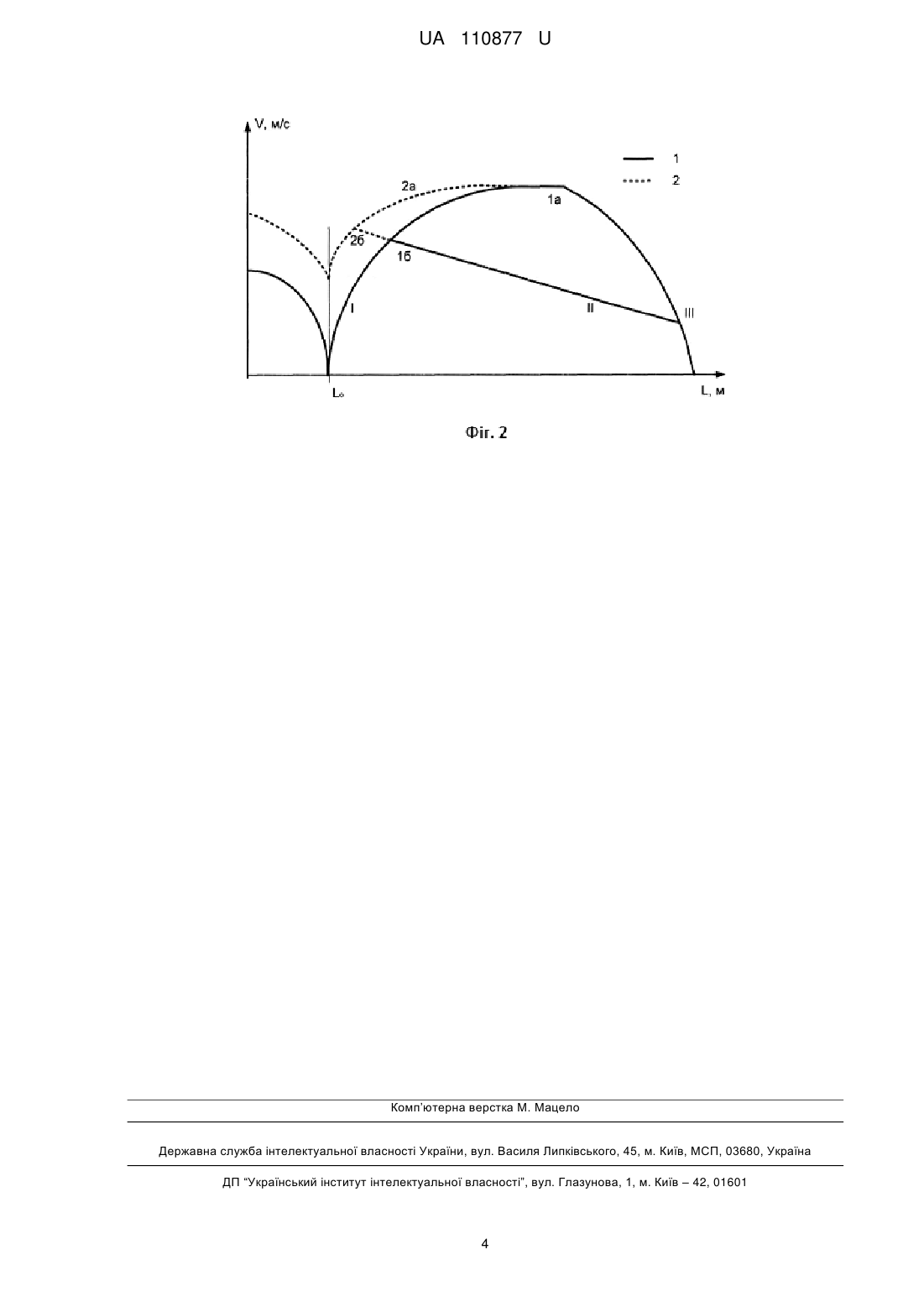
Реферат: Система автоматизованого вибору швидкісного режиму руху наземного електричного транспортного засобу містить блок центрального процесора з підключеними до нього блоком індикації, блоком пам'яті, датчиком шляху і швидкості, датчиками напруги та струму, блок порівняння часу програмного і фактичного руху та приймально-передавальним пристроєм. Містить трекер супутникової навігації, датчики закриття дверей і відправлення транспортного засобу, прилади вимірювання кількості пасажирів і маси транспортного засобу, а в блок пам'яті записана оцифрована карта міста, графік руху, плановий режим руху на ділянках маршруту та програма розрахунку режиму руху і витрат електроенергії. UA 110877 U (54) СИСТЕМА АВТОМАТИЗОВАНОГО ВИБОРУ ШВИДКІСНОГО РЕЖИМУ РУХУ НАЗЕМНОГО ЕЛЕКТРИЧНОГО ТРАНСПОРТНОГО ЗАСОБУ UA 110877 U UA 110877 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до наземного міського електричного транспорту і може бути використана для автоматизованого вибору швидкісного режиму руху тролейбусів, трамваїв, швидкісних трамваїв, електропоїздів з дотриманням графіка руху, при мінімально можливих витратах електроенергії. Відомий пристрій автоматизованого ведення поїздів метрополітену, що містить програмний пристрій відправлення поїздів, прилади контролю фактичного руху, блок порівняння часу програмного і фактичного руху, який програмує час руху поїздів метрополітену від однієї станції до іншої і забезпечує включення та відключення двигунів поїзда. Цей пристрій забезпечує ліквідацію можливих затримок на станціях чи в результаті погіршення ходових якостей поїзда, причому ліквідація часу запізнення здійснюється з урахуванням вимог економних витрат електроенергії [1]. До недоліків цього пристрою належить те, що він призначений тільки для руху по колії, вздовж якої розміщені додаткові датчики руху, пристрій побудовано на старій технічній базі без урахування сучасних інформаційних технологій. Як найближчий аналог прийнята відома система автоматизованого ведення вантажних поїздів підвищеної маси і довжини з розміщеними по їх довжині локомотивами, що містить встановлений на кожному локомотиві блок центрального процесора з підключеними до нього блоком індикації, блоком пам'яті, датчиками шляху і швидкості, датчиками напруги та струму, приймально-передавальним пристроєм і підключеним до центрального процесора блоком автоведення. Ця система реалізує на кожному локомотиві власну програму ведення поїзда і забезпечує оптимальні витрати електроенергії [2]. Недоліками цієї системи є те, що вона призначена для автоматизованого водіння поїздів по залізничній колії, де проблема визначення місцезнаходження зводиться тільки до вимірювання пройденого шляху, транспортна ситуації досить проста, маса транспортного засобу є незмінна і розрахунки виконуються для певного, наперед заданого, складу поїзда. В основу корисної моделі поставлена задача зменшення витрат електроенергії на рух транспортного засобу і полегшення роботи водія шляхом автоматизації процесу вибору швидкісного режиму руху в умовах складної транспортної ситуації міста, у якому введення додаткових елементів забезпечило одержання, з достатньою точністю, даних про фактичний рух, місце знаходження і масу транспортного засобу, а програмне забезпечення дозволило виконати розрахунки режиму продовження руху з врахуванням вимог графіка при мінімально можливих затратах електроенергії. Основним технічним результатом є зменшення затрат електроенергії на рух, полегшення роботи водія, одержання на диспетчерському пункті вичерпної інформації про стан руху транспортного засобу та споживання електроенергії. Поставлена задача вирішується тим, що система автоматизованого вибору швидкісного режиму руху наземного електричного транспортного засобу, яка містить блок центрального процесора з підключеними до нього блоком індикації, блоком пам'яті, датчиком шляху і швидкості, датчиками напруги та струму, блок порівняння часу планового і фактичного режимів руху та приймально-передаючий пристрій, згідно з корисною моделлю, для вибору потрібного швидкісного режиму руху від поточної точки місцезнаходження транспортного засобу до наступної зупинки відповідно до графіка руху, при мінімально можливих витратах електричної електроенергії, містить трекер супутникової навігації, датчики закриття дверей і відправлення транспортного засобу, прилади вимірювання кількості пасажирів і маси транспортного засобу, а в блок пам'яті записана оцифрована карта міста, графік руху, плановий режим руху, та програма розрахунку продовження режиму руху і витрат електроенергії. Згідно з корисною моделлю, бортовий комп'ютер попередньо розраховує два можливі режими продовження руху: найбільш швидкий, з урахуванням обмежень правил руху, та повільний, найбільш економний з точки зору витрат електроенергії, визначає діапазон часу можливого прибуття на зупинку, порівнює його з графіком руху, вибирає фактичний час прибуття та розраховує бажаний режим руху з урахуванням вибраного часу прибуття на ближню зупинку, чи до декількох наступних зупинок, в разі неможливості прибуття на ближню зупинку без запізнення. Система автоматизованого вибору швидкісного режиму руху наземного електричного транспортного засобу містить (див. фіг. 1) встановлений на кожному транспортному засобі 1 центральний процесор 2, до якого підключено блок 3 пам'яті із записаними у ній графіком руху 3.1, плановим режимом руху на кожній ділянці маршруту 3.2, оцифрованою картою міста 3.3 та програмою розрахунку режиму руху і затрат електроенергії 3.4; блок 4 вимірювання швидкості та шляху пройденого від зупинки; блок 5 вимірювальних приладів струму і напруги; блок 6 реєстрації кількості пасажирів; блок 7 датчик закриття дверей; блок 8 трекер супутникової 1 UA 110877 U 5 10 15 20 25 30 35 40 45 50 55 60 навігації (GPS, ГЛОНАСС); блок 9 формування сигналів, що передаються на диспетчерський пункт; блок 10 приймач-передавач GSM/GPRS; блок 11 гарнітура водія; блок 12 дисплей. Функціонально запропонована система, встановлена на борту транспортного засобу, забезпечує дотримання планового режиму руху, і, в разі його порушення, автоматизований вибір швидкісного режиму продовження руху у відповідності до графіка, при мінімально можливих затратах електричної енергії. Система також забезпечує передачу на диспетчерський пункт даних про виконаний рух та витрати електричної енергії, а в разі неможливості дотримання графіку - запит на його зміну. Контроль дотримання планового режиму руху здійснюється центральним процесором шляхом порівняння фактичного режиму руху на ділянці маршруту з плановим. Згідно з показаннями блока 8 трекера супутникової навігації визначається ділянка маршруту на якій знаходиться транспортний засіб і точка його розміщення та швидкість, уточнюються дані трекера за показами блока вимірювання 4, уточнені дані порівнюються з плановим режимом руху 3.2, внесеним в блок пам'яті 3. В разі відхилення водієві подається звуковий чи візуальний сигнал і пропонується розрахований рекомендований режим продовження руху. Алгоритм розрахунку полягає в тому, що процесор (див. Фіг. 1, п. 2) за розміщеною в блоці пам'яті 3 програмою, розраховує два можливі режими продовження руху, найбільш швидкий, з врахуванням обмежень правил руху (див. Фіг. 2, п. 1а) та повільний, найбільш економний, з точки зору витрат електроенергії (див. Фіг. 2, п. 1б), визначає діапазон часу можливого прибуття на зупиночний пункт, порівнює цей діапазон з графіком руху і, якщо час прибуття, згідно з графіком, входить у визначений діапазон, вибирає розрахунковий час прибуття та виконує обчислення рекомендованого режиму руху, який доводиться до відома водію на екрані дисплею, чи відповідними звуковими сигналами на включення чи виключення двигуна або на перехід від однієї швидкісної позиції регулятора до іншої. В разі, коли у визначений діапазон часу, час прибуття не входить через значне запізнення, розрахунок проводиться до наступної за поточною зупинки, з врахуванням можливості наздогнати запізнення і ввійти в графік руху. В разі, якщо до кінця маршруту ввійти в графік руху неможливо, передається повідомлення диспетчеру і диспетчер приймає рішення про зміну графіка руху. На Фіг. 2 показано варіанти продовження руху при повній зупинці (див. Фіг 2, 1а, 1б) і при відставанні, але русі з певною швидкістю (див. Фіг. 2, 2а, 2б). Ділянки руху на фігурі 2 відповідають: І - руху при тязі (двигун ввімкнутий), II - вибігу (двигун відключено), III - гальмуванню. Під час виконання розрахунків режиму продовження руху з поточної точки маршруту враховуються характеристики ділянки до зупиночного пункту, які одержані на основі оцифрованої карти міста 3.3, або введеної взамін оцифрованої карти схеми маршруту. Конкретна ділянка маршруту визначається автоматично за показами трекера супутникової навігації 8. Оскільки трекери супутникової навігації визначають координати і швидкість з недостатньою для розрахунків точністю, то додатково використовуються показання вимірювальних приладів 4, причому вимірювання шляху від зупинки починається автоматично за сигналами датчика закриття дверей. Розрахунок режиму продовження руху здійснюється, згідно із запропонованими авторами формулами, в яких враховується залежність режиму руху від маси транспортного засобу (суми маси тари транспортного засобу та маси пасажирів), а маса пасажирів розраховується, згідно з показаннями блока 6 реєстрації кількості пасажирів після сигналу блока 7 про закриття дверей. Рекомендована система автоматизованого вибору швидкісного режиму руху включає, при додатковому встановленні відповідних виконавчих органів, можливість автоматичного керування роботою тягового двигуна, але в умовах руху по міських магістралях реалізовувати цей режим не рекомендується і керування здійснюється водієм в режимі підказки, яку дає автоматизована система вибору швидкісного режиму руху. За результатами вимірювань, отриманих вимірювальними приладами 5 струму та напруги, бортовий процесор 2 обчислює фактичні витрати електроенергії на рух транспортного засобу, блок 9 формування сигналів формує пакет даних для передачі на диспетчерський пункт, в який включає результати розрахунків витрат електроенергії, дані блока 8 супутникової навігації про координати і швидкість транспортного засобу в поточний момент часу та інші дані і за допомогою блока 10 приймача-передавача автоматично передає цей пакет даних по каналу GPRS на диспетчерський пункт. Технічним результатом використання запропонованої корисної моделі є зменшення витрат електроенергії та полегшення роботи водія транспортного засобу, який, в умовах складної дорожньої ситуації, повинен вирішувати питання ведення транспортного засобу з дотриманням правил дорожнього руху, графіку руху та економії електроенергії. Запропонована корисна модель дозволяє також забезпечити пасажирів, які знаходяться на зупинках, більш 2 UA 110877 U 5 10 15 достовірними даними про момент прибуття транспортного засобу. Крім цього вона також дозволяє вирішити питання обліку і розрахунку за спожиту електроенергію різними підприємствами, які одночасно здійснюють перевезення пасажирів в межах міста, оскільки за існуючою системою обліку електроенергії, який ведеться за показаннями лічильників, розміщених на тягових підстанціях, розділити ці затрати неможливо. Джерела інформації: 1. Кривицкий К.Ф. Устройство автоматического ведения поездов метрополитена. / К.Ф. Кривицкий, Б.Τ Анашкин, Д.И. Большаков, В.В. Екимов, С.С. Казанцев, Н.К. Малеев, И.С. Новиков, В.С. Сорокин Ю.Ф. Соловьев, Л.В. Фролов, И.И. Герасенков // А.С. СССР № 497184, М. Кл. В61L 3/20, G05В 19/34 заявл. 01.10.62, опубл. 30.12.75. Бюллетень № 48. 2. Рабинович М.Д. Система, автоматизированного вождения грузовых поездов повышенной массы и длины с распределенными по их длине локомотивами. / М.Д. Рабинович Л.А. Мугинштейн, A.M. Кривной, М.С. Пясик Ф.В. Аршавский, B.C. Ткачёв, С.В. Ефремов. / Патент РФ № 2238860, класс МПК: В61С 17/12, заявл. 11.12.2003, опубл. 27.10.2004. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 1. Система автоматизованого вибору швидкісного режиму руху наземного електричного транспортного засобу, що містить блок центрального процесора з підключеними до нього блоком індикації, блоком пам'яті, датчиком шляху і швидкості, датчиками напруги та струму, блок порівняння часу програмного і фактичного руху та приймально-передавальним пристроєм, яка відрізняється тим, що для вибору потрібного швидкісного режиму руху від поточної точки місцезнаходження транспортного засобу до наступної зупинки, відповідно з графіком руху, при мінімально можливих витратах електричної електроенергії містить трекер супутникової навігації, датчики закриття дверей і відправлення транспортного засобу, прилади вимірювання кількості пасажирів і маси транспортного засобу, а в блок пам'яті записана оцифрована карта міста, графік руху, плановий режим руху на ділянках маршруту та програма розрахунку режиму руху і витрат електроенергії. 2. Система за п. 1, яка відрізняється тим, що бортовий комп'ютер попередньо розраховує два можливі режими руху: найбільш швидкий, з врахуванням обмежень правил руху, та повільний, найбільш економний з точки зору витрат електроенергії, визначає діапазон часу можливого прибуття на зупиночний пункт, порівнює його з графіком руху, визначає фактичний час прибуття та розраховує бажаний режим руху до наступної зупинки чи декількох зупинок до кінця маршруту. 3 UA 110877 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B60W 50/00, B60W 50/08
Мітки: електричного, швидкісного, руху, наземного, вибору, режиму, автоматизованого, система, засобу, транспортного
Код посилання
<a href="https://ua.patents.su/6-110877-sistema-avtomatizovanogo-viboru-shvidkisnogo-rezhimu-rukhu-nazemnogo-elektrichnogo-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Система автоматизованого вибору швидкісного режиму руху наземного електричного транспортного засобу</a>
Спосіб визначення маршруту руху наземного транспортного засобу у вибраний проміжок часу
Номер патенту: 57202
Опубліковано: 16.06.2003
Автор: Олексієнко Олег Володимирович
МПК: G01C 21/34, G01C 7/00
Мітки: маршруту, проміжок, вибраний, засобу, визначення, наземного, транспортного, руху, часу, спосіб
Формула / Реферат:
Спосіб визначення маршруту рухання наземного транспортного засобу у вибраний проміжок часу що включає читання дискретної інформації від супутників GPS та ГЛОНАСС про місцезнаходження наземного транспортного засобу, запис та зберігання отриманої інформації, обробку записаної інформації з допомогою спеціального програмного забезпечення комп'ютерів і вивід здобутих результатів в системах відображення інформації, який відрізняється тим, що для...
Спосіб визначення режиму руху колісного транспортного засобу
Номер патенту: 29824
Опубліковано: 15.11.2000
Автори: Бобровський Генадій Олександрович, Бобровська Наталія Генадіївна
МПК: B61C 15/00, G01P 3/02
Мітки: засобу, руху, колісного, транспортного, визначення, режиму, спосіб
Формула / Реферат:
Спосіб визначення режиму руху колісного транспортного засобу, що включає операції реєстрації швидкості обертання ведучих та ведених коліс, її порівняння із заздалегідь установленим критичним значенням і реєстрацією режимів, при яких швидкість коліс не перевищує (перевищує) величину її критичного значення, який відрізняється тим, що режим руху визначають по взаємному розташуванню рухливих магнітних елементів, котрі можуть фіксуватися, або...
Система попередження про перевищення допустимої швидкості руху транспортного засобу
Номер патенту: 85731
Опубліковано: 25.11.2013
Автор: Скороход Іван Мефодійович
МПК: G08G 1/052
Мітки: система, транспортного, попередження, засобу, швидкості, допустимої, руху, перевищення
Формула / Реферат:
1. Система попередження про перевищення допустимої швидкості руху транспортного засобу, яка включає показник фактичної швидкості транспортного засобу, пристрій для вибрання допустимої швидкості, пристрій для порівняння фактичної і допустимої швидкості і оповіщувач перевищення допустимої швидкості, з'єднані між собою і з системою електроживлення транспортного засобу так, що оповіщувач спрацьовує при досягненні транспортним засобом швидкості,...
Система попередження про перевищення допустимої швидкості руху транспортного засобу
Номер патенту: 109393
Опубліковано: 10.08.2015
Автор: Скороход Іван Мефодійович
МПК: B60K 31/18, G08G 1/16, B60Q 5/00
Мітки: перевищення, попередження, транспортного, руху, допустимої, система, засобу, швидкості
Формула / Реферат:
1. Система попередження про перевищення допустимої швидкості руху транспортного засобу, яка включає показник фактичної швидкості транспортного засобу, пристрій для обрання допустимої швидкості, пристрій для порівняння фактичної і допустимої швидкості і оповіщувач перевищення допустимої швидкості, з'єднані між собою і з системою електроживлення транспортного засобу так, що оповіщувач спрацьовує при досягненні транспортним засобом швидкості,...
Застосування способу визначення коефіцієнта сумарного опору руху транспортного засобу для об’єктивного нормування середньої швидкості руху при навчанні водіння бойових машин
Номер патенту: 55431
Опубліковано: 10.12.2010
Автори: Чорний Микола Васильович, Чаган Юрій Анатолійович
МПК: G09B 9/02
Мітки: транспортного, нормування, опору, машин, бойових, водіння, середньої, руху, сумарного, коефіцієнта, способу, визначення, швидкості, застосування, засобу, об'єктивного, навчанні
Формула / Реферат:
Застосування способу визначення коефіцієнта сумарного опору руху транспортного засобу для об'єктивного нормування середньої швидкості руху при навчанні водіння бойових машин за енергетичними затратами.
Попередній патент: Спосіб лікування туберкульозу передміхурової залози і сім’яних пухирців
Наступний патент: Спосіб спалювання паливної сировини в твердопаливних котлах
Випадковий патент: Спосіб відновлення сипучості змерзлого матеріалу в залізничних піввагонах