Блінцов Сергій Володимирович
Система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням
Номер патенту: 111027
Опубліковано: 10.03.2016
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/08, B63H 21/21, B63H 25/42 ...
Мітки: швидкістю, регулятора, підводного, автоматичного, апарата, передбаченням, руху, система, керування, базі
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок затримки вихідного сигналу,...
Система автоматичного керування просторовим рухом підводного апарата підвищеної точності
Номер патенту: 110681
Опубліковано: 25.01.2016
Автор: Блінцов Сергій Володимирович
МПК: B63H 25/42, B63G 8/08, B63H 21/21 ...
Мітки: точності, автоматичного, підводного, керування, апарата, просторовим, система, рухом, підвищеної
Формула / Реферат:
Система автоматичного керування просторовим рухом підводного апарата, яка містить задавач вхідного сигналу, датчик горизонтальної лінійної швидкості руху та датчик кутової швидкості руху, зв'язані з корпусом підводного апарата, датчики частоти обертання лівого і правого гребних гвинтів, зв'язані з відповідними гвинтами, перший канал виконавчого механізму, що об'єднує послідовно з'єднані перший силовий перетворювач, перший електродвигун та...
Система автоматичного керування просторовим рухом підводного апарата

Номер патенту: 110447
Опубліковано: 25.12.2015
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/08, B63H 25/42, B63H 21/21 ...
Мітки: апарата, підводного, просторовим, система, керування, рухом, автоматичного
Формула / Реферат:
Система автоматичного керування просторовим рухом підводного апарата, яка містить задавач вхідного сигналу, датчик горизонтальної та датчик кутової швидкості руху, зв'язані з корпусом підводного апарата, датчики частоти обертання лівого і правого гребних гвинтів, зв'язані з відповідними гвинтами, перший канал виконавчого механізму, що об'єднує послідовно з'єднані перший силовий перетворювач, перший електродвигун та лівий гребний гвинт,...
Система автоматичного керування швидкістю руху підводного апарата на базі штучних нейронних мереж з еталонною моделлю
Номер патенту: 110179
Опубліковано: 25.11.2015
Автор: Блінцов Сергій Володимирович
МПК: G05D 1/02, B63H 21/21, G05B 13/00 ...
Мітки: нейронних, моделлю, автоматичного, базі, швидкістю, руху, штучних, еталонною, керування, підводного, апарата, мереж, система
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата на базі штучних нейронних мереж з еталонною моделлю, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун з гребним гвинтом, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок затримки...
Система автоматичного керування швидкістю руху підводного апарата на базі narma-l2 ругулятора
Номер патенту: 110178
Опубліковано: 25.11.2015
Автор: Блінцов Сергій Володимирович
МПК: B63H 25/42, B63G 8/08, B63H 21/21 ...
Мітки: система, базі, підводного, руху, керування, ругулятора, narma-l2, автоматичного, апарата, швидкістю
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата на базі NARMA-L2 регулятора, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок затримки вихідного сигналу, зв'язаний з першим...
Комбінована система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням та narma-l2-совітником
Номер патенту: 110082
Опубліковано: 10.11.2015
Автор: Блінцов Сергій Володимирович
МПК: B63H 25/42, B63H 21/21, B63G 8/08 ...
Мітки: narma-l2-совітником, регулятора, автоматичного, базі, апарата, швидкістю, руху, підводного, передбаченням, комбінована, керування, система
Формула / Реферат:
Комбінована система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням та NARMA-L2-совітником, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок...
Система автоматичного керування швидкістю руху підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів
Номер патенту: 107976
Опубліковано: 10.03.2015
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/00, B63H 25/00
Мітки: апарата, система, швидкістю, автоматичного, параметрів, керування, онлайн-ідентифікацією, руху, базі, моделі, інверсної, підводного
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів, що містить задавач вхідного сигналу, датчик швидкості руху підводного апарата і датчик частоти обертів гребного гвинта, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт та підводний апарат (ПА) як об'єкт керування, яка відрізняється тим, що в неї додатково введені обчислювач прискорення ПА,...
Регулятор частоти обертів гребного гвинта підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів
Номер патенту: 106812
Опубліковано: 10.10.2014
Автор: Блінцов Сергій Володимирович
МПК: B63H 25/00, B63G 8/00
Мітки: моделі, регулятор, інверсної, гвинта, базі, частоти, апарата, обертів, підводного, гребного, параметрів, онлайн-ідентифікацією
Формула / Реферат:
Регулятор частоти обертів гребного гвинта підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів, що містить задавач вхідного сигналу, датчик частоти обертів гребного гвинта та послідовно з'єднані силовий перетворювач, електродвигун і гребний гвинт, який відрізняється тим, що в нього додатково введені обчислювач прискорення частоти обертів, обчислювач інерційного коефіцієнта та обчислювач керуючого сигналу, при цьому...
Система автоматичного керування рухом підводного апарата в горизонтальній площині
Номер патенту: 101202
Опубліковано: 11.03.2013
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/00, B63H 25/00
Мітки: рухом, горизонтальний, площині, керування, автоматичного, система, апарата, підводного
Формула / Реферат:
Система автоматичного керування рухом підводного апарата в горизонтальній площині, яка містить задавач вхідного сигналу, датчик лінійної швидкості руху підводного апарата, датчик частоти обертання першого гребного гвинта, перший канал виконавчого механізму, що об'єднує послідовно з'єднані перший силовий перетворювач, перший електродвигун, перший гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що перший...
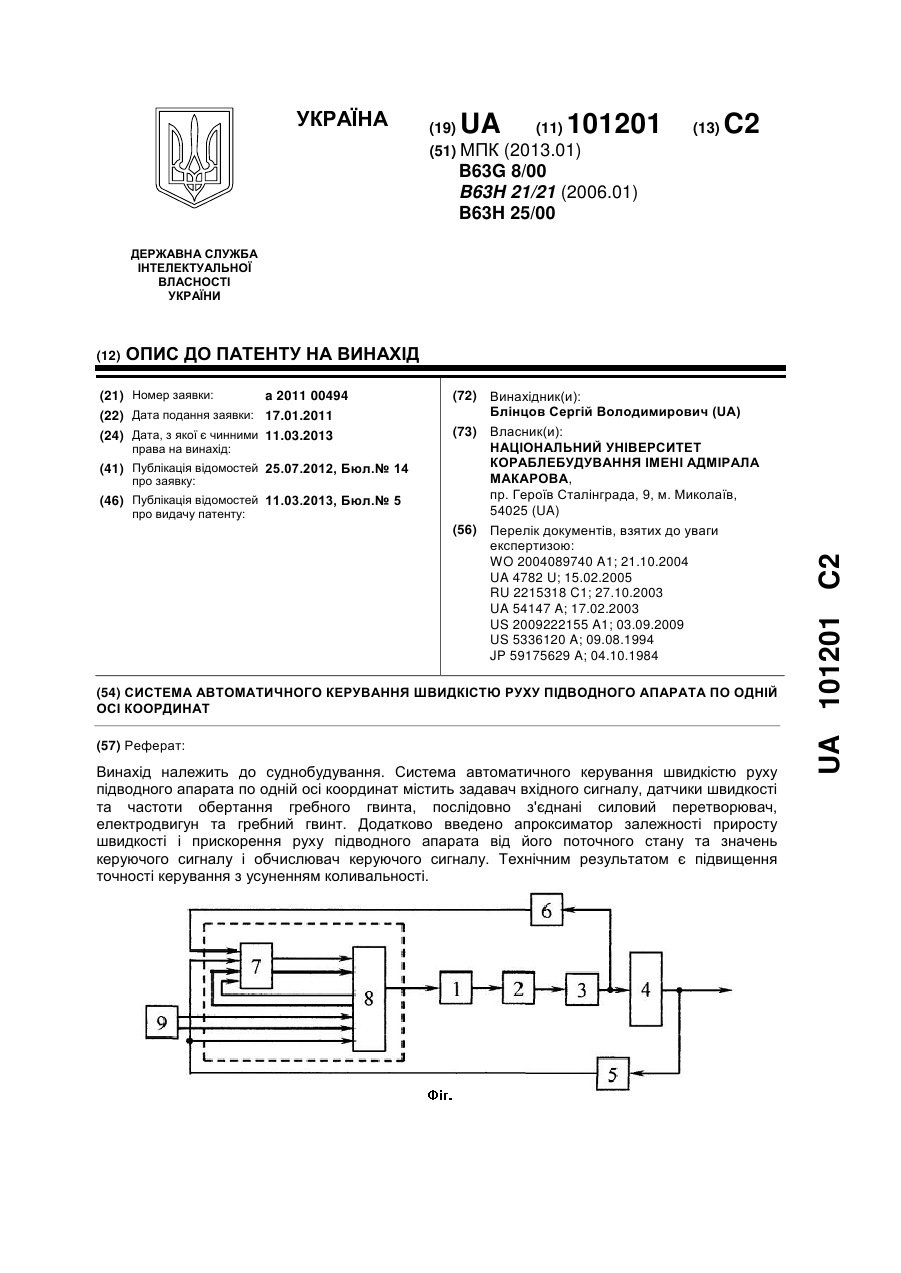
Система автоматичного керування швидкістю руху підводного апарата по одній осі координат
Номер патенту: 101201
Опубліковано: 11.03.2013
Автор: Блінцов Сергій Володимирович
МПК: B63H 25/00, B63H 21/21, B63G 8/00 ...
Мітки: осі, руху, апарата, підводного, автоматичного, координат, система, одний, керування, швидкістю
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата по одній осі координат, яка містить задавач вхідного сигналу, датчики швидкості та частоти обертання гребного гвинта, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено апроксиматор залежності приросту швидкості і прискорення руху підводного апарата від його...
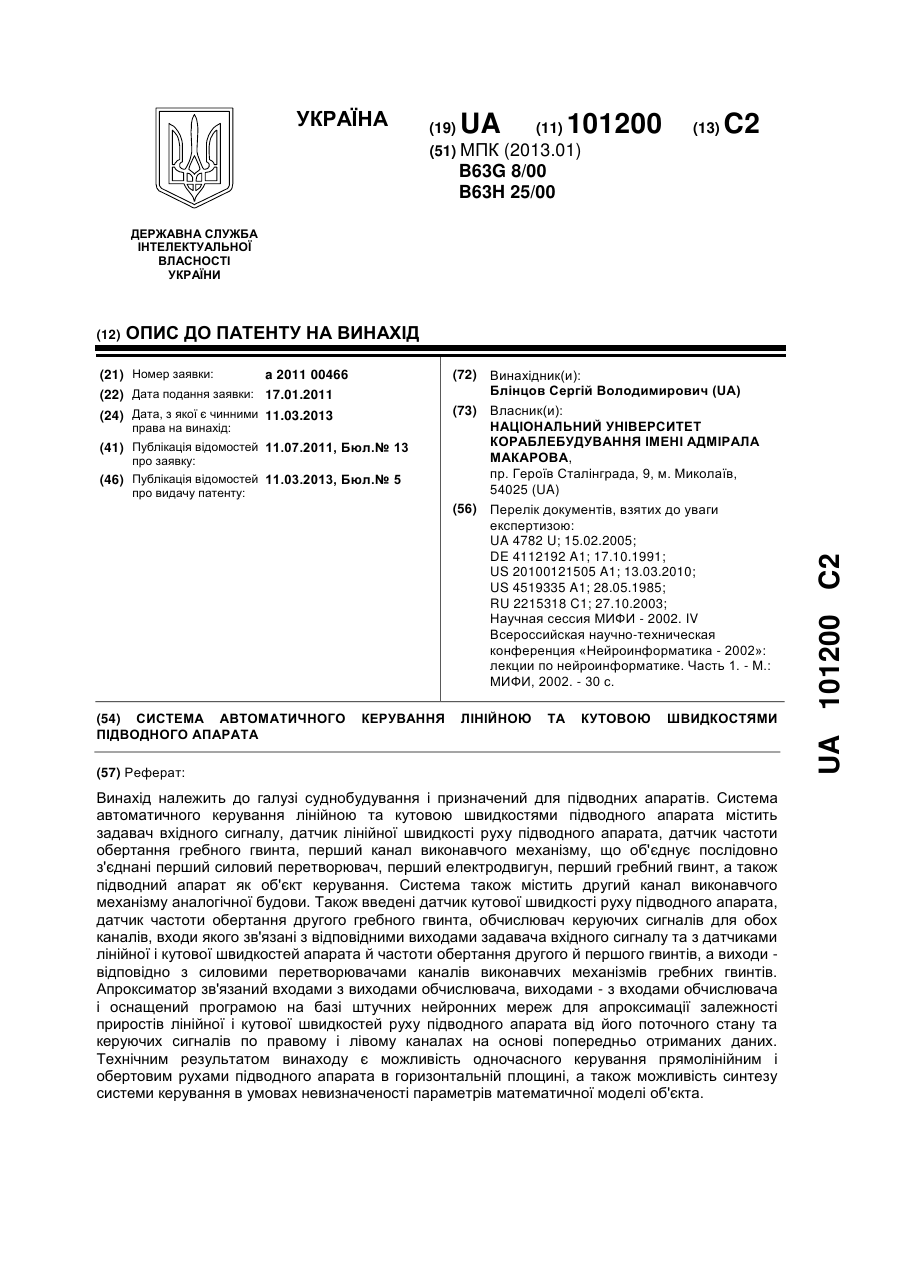
Система автоматичного керування лінійною та кутовою швидкостями підводного апарата
Номер патенту: 101200
Опубліковано: 11.03.2013
Автор: Блінцов Сергій Володимирович
МПК: B63H 25/00, B63G 8/00
Мітки: апарата, керування, лінійною, підводного, автоматичного, система, швидкостями, кутовою
Формула / Реферат:
Система автоматичного керування лінійною та кутовою швидкостями підводного апарата, яка містить задавач вхідного сигналу, датчик лінійної швидкості руху підводного апарата, датчик частоти обертання першого гребного гвинта, перший канал виконавчого механізму, що об'єднує послідовно з'єднані перший силовий перетворювач, перший електродвигун, перший гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що перший...
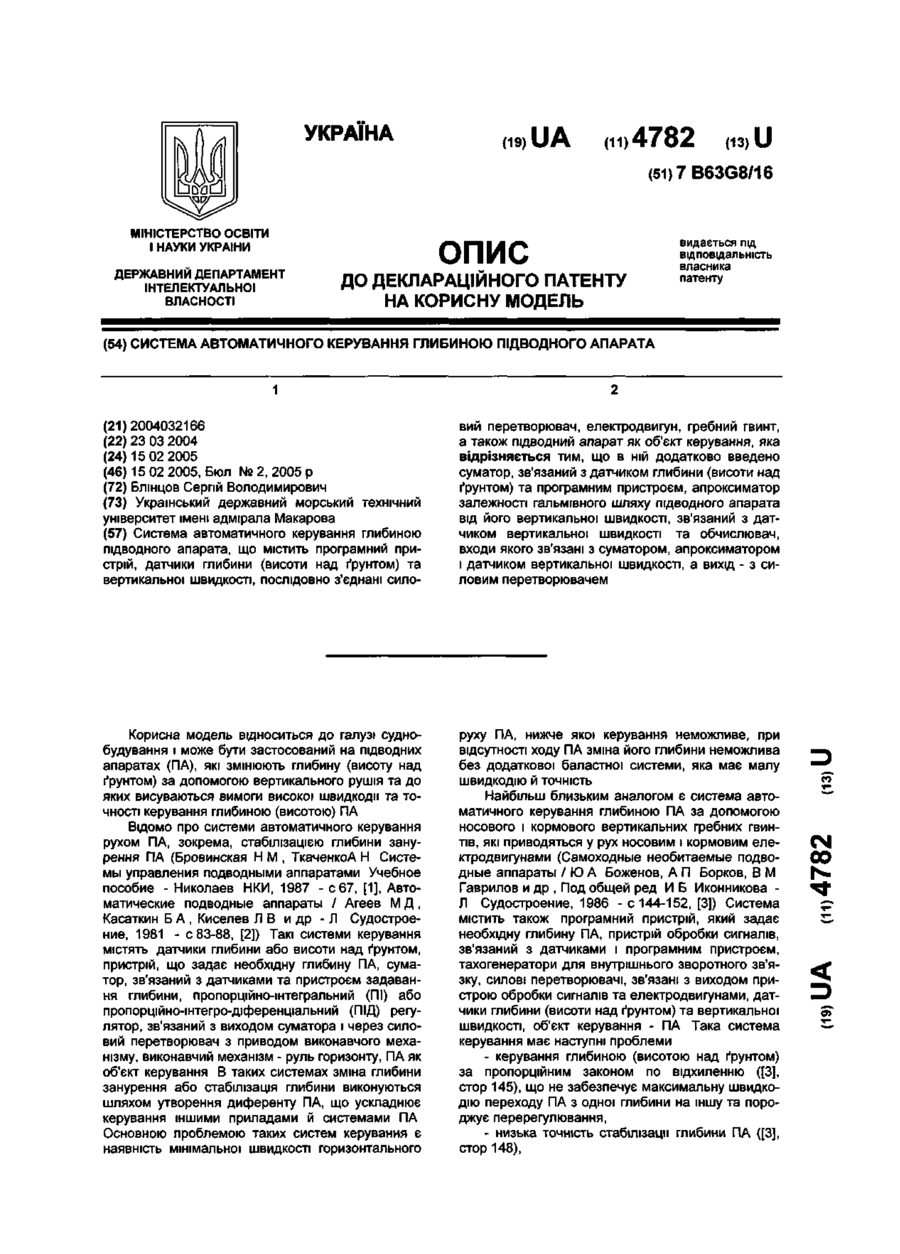
Система автоматичного керування глибиною підводного апарата
Номер патенту: 4782
Опубліковано: 15.02.2005
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/00
Мітки: автоматичного, керування, підводного, система, апарата, глибиною
Формула / Реферат:
Система автоматичного керування глибиною підводного апарата, що містить програмний пристрій, датчики глибини (висоти над ґрунтом) та вертикальної швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що в ній додатково введено суматор, зв'язаний з датчиком глибини (висоти над ґрунтом) та програмним пристроєм, апроксиматор залежності гальмівного...