Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі використання сукупності інформативних полів
Номер патенту: 113791
Опубліковано: 10.02.2017
Автори: Сидоренко Руслан Григорович, Єрьоміна Наталія Сергіївна, Рибалка Григорій Валерійович, Таршин Володимир Анатолійович, Сотніков Олександр Михайлович, Танцюра Олександр Борисович
Формула / Реферат
Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі використання сукупності інформативних полів, який полягає у застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності), при цьому вимірюється або відстань між зображеннями, або міра їх близькості, який відрізняється тим, що додатково використовуються зважування складових вирішальних функцій по полях яскравості, контрасту та їх сукупності.
Текст
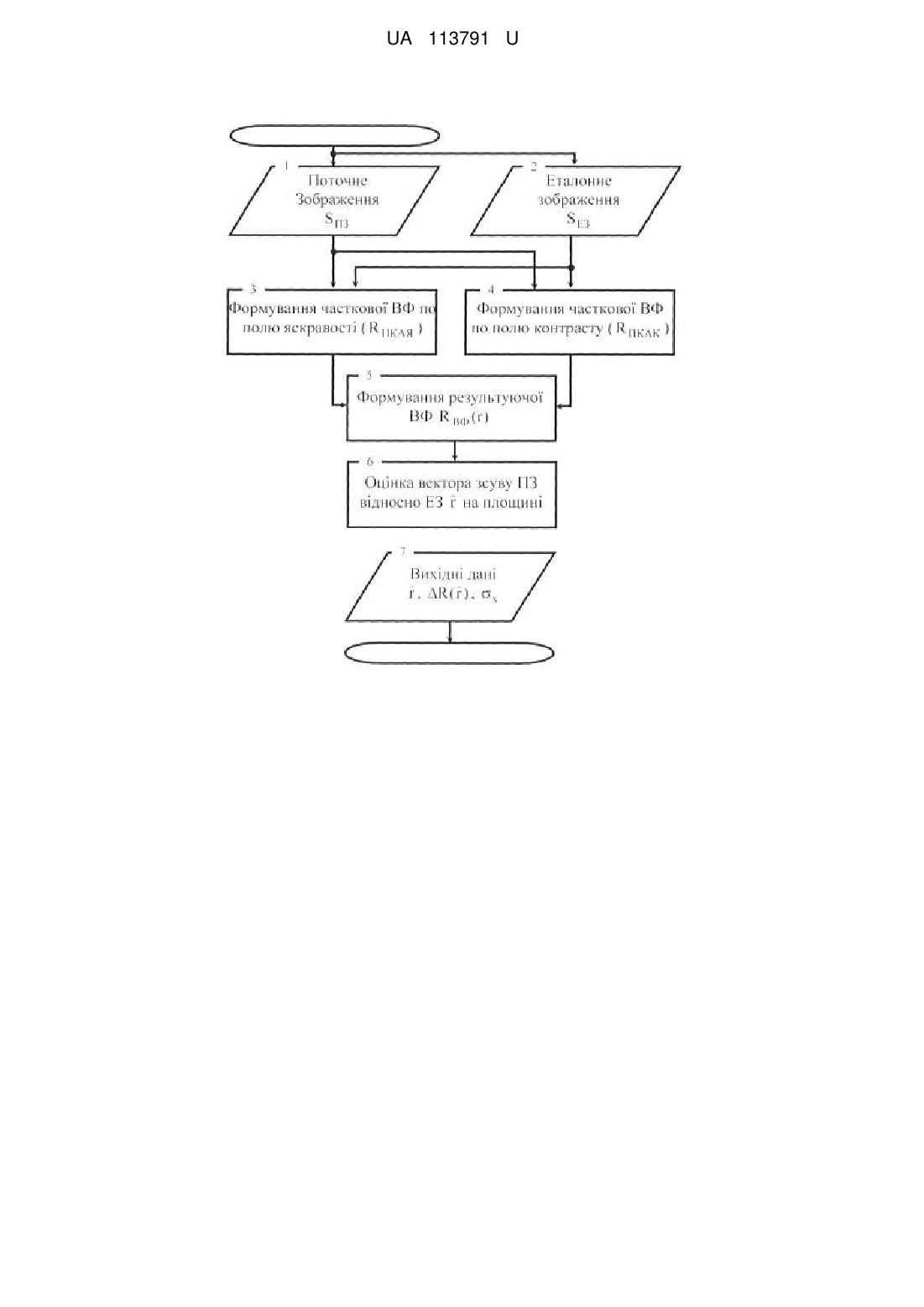
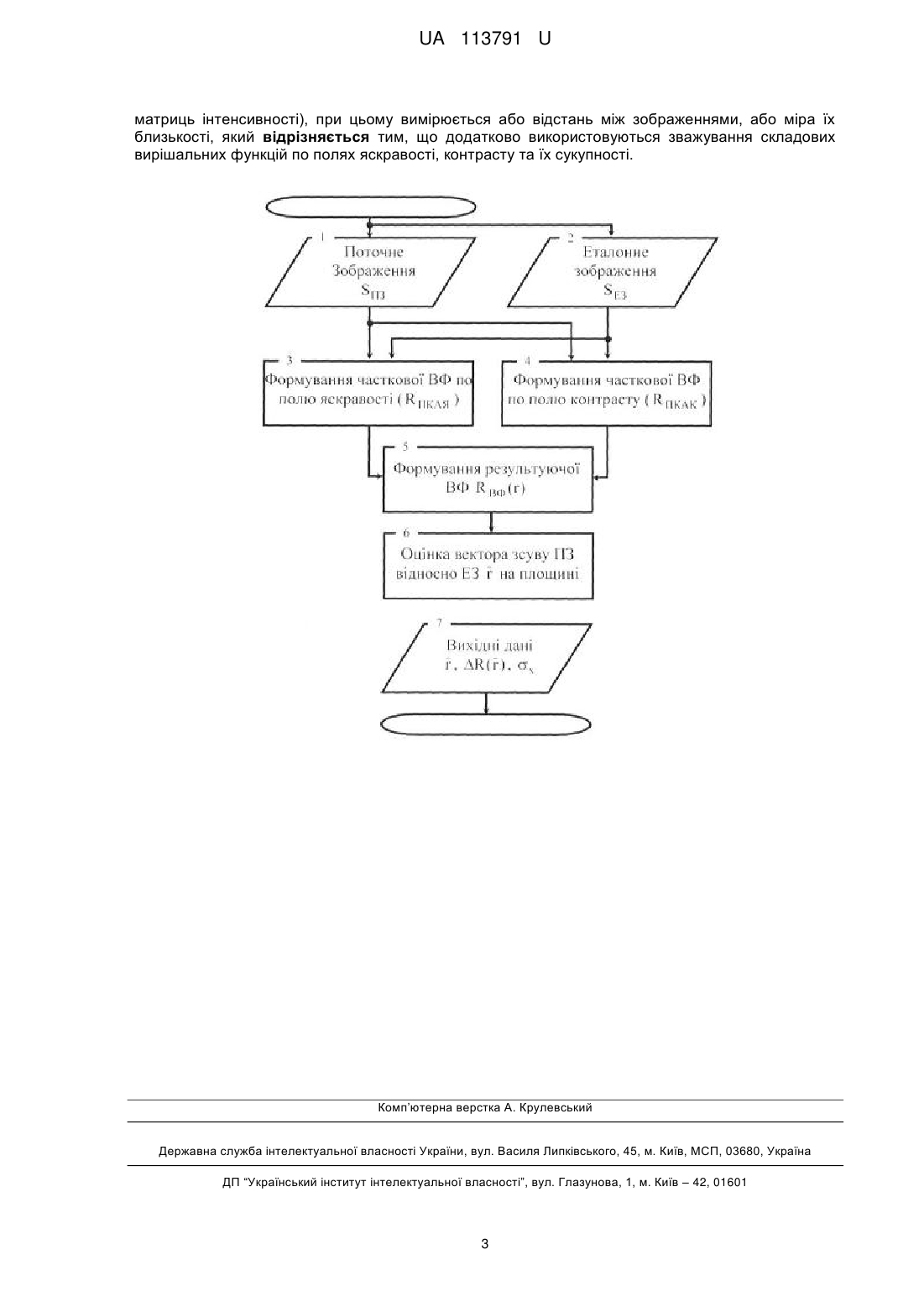
Реферат: Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі використання сукупності інформативних полів полягає у застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності), при цьому вимірюється або відстань між зображеннями, або міра їх близькості. Крім цього, додатково використовуються зважування складових вирішальних функцій по полях яскравості, контрасту та їх сукупності. UA 113791 U (12) UA 113791 U UA 113791 U 5 10 15 20 25 30 35 40 Запропонована корисна модель належить до галузі навігації та управління рухом і може бути використана для оптимізації процесу визначення просторового положення літальних апаратів (ЛА), а також при створенні сучасних кореляційно-екстремальних систем навігації (КЕСН). Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є "Спосіб забезпечення максимальних значень точності та імовірності місцевизначення ЛА з КЕСН" [1], що передбачає застосування класичного кореляційного алгоритму, який використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності), при цьому вимірюється або відстань між зображеннями, або міра їх близькості. Недоліком способу-прототипу є те, що він не забезпечує формування вирішальної функції (ВФ) КЕСН в умовах різного роду спотворень поверхні візування (ПВ), обумовлених впливом перешкод, застосуванням засобів зниження помітності об'єктів, а також сезонних, кліматичних і добових змін в районі прив'язки. В основу корисної моделі поставлена задача створити спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі використання сукупності інформативних полів, який дозволить формувати ВФ з використанням полів яскравості й контрасту та їх сукупності та отримувати на їх основі команди на корекцію траєкторії КЕСН ЛА в умовах різних типів спотворень ПВ. Поставлена задача вирішується за рахунок того, що у способі-прототипі, який передбачає застосування класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності), при цьому вимірюється або відстань між зображеннями, або міра їх близькості, додатково використовуються зважування складових ВФ по полях яскравості, контрасту та їх сукупності. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у формуванні необхідних ВФ, що дає можливість отримувати команди на корекцію траєкторії КЕСН ЛА в умовах різного роду спотворень ПВ, які обумовлені впливом перешкод, застосуванням засобів зниження помітності об'єктів, а також сезонних, кліматичних і добових змін в районі прив'язки. На кресленні приведена реалізація запропонованого способу у вигляді структурної схеми алгоритму. Суть запропонованого способу полягає у формуванні вирішальної функції по сукупності полів яскравості та контрасту за допомогою зважування її складових, які відповідають спотворенням поверхні візування. Поверхня візування представлена як результат поелементного множення Адамара двох ₒ матриць [2] B SПЗ однакової розмірності, в якому елементи B(i, j)=1 характеризують відсутність спотворень у даному елементі розподілу. Вирішальна функція представлена виразом R(k,l) R1(k,l) R(k,l) , (1) N1 N2 де R(k, l) [SЕЗ (i, j) SЕЗ ][ SПЗ (i k l, j l l) SПЗkl ] i1 j1 ; N1N2 1 N1 N2 SПЗ (i k l, j l l). N1N2 i1 j1 Другий доданок виразу (1) описує результат взаємної кореляції еталонного зображення (ЕЗ) з матрицею спотворень поточного зображення (ПЗ) і певним чином відображає ступінь невідповідності ПЗ і вихідного зображення (ВЗ). Спотворення частини ПЗ, яке відповідає використовуваному для навігації ЛА ЕЗ, визначається єдиним значенням ВФ, що формується при відсутності розузгодження між ПЗ і ЕЗ. Оцінка спотворень проведена по самій ВФ, проте, кількісно оцінити характеристики спотворень ПЗ по другому доданку ВФ (1) не можливо, оскільки (1) є результатом кореляції лише певної (малої) частини ЕЗ з перешкодовою складовою ПЗ. Сформоване на етапі первинної обробки ПЗ ( SПЗ ) є матрицею стаціонарного гаусівського шуму некритичної інтенсивності, яка за розміром відповідає матриці ПЗ, де ВФ визначається виразом SПЗkl 45 50 1 UA 113791 U N1 N2 R(k, l) 5 10 15 20 [SЕЗ (i, j) SЕЗ ][ SПЗ (i k l, j l l) SПЗkl ] i1 j1 . (2) N1N2 Другий доданок виразу (2) описує вплив перешкодової складової на результат формування ВФ відповідно до поточної фоново-цільової обстановки. Еталонне зображення вибирається на основі оцінки інформативності та стабільності яскравості, контрасту і структури ВЗ. ВФ одержана по неспотворених ПЗ представлена у вигляді RВФ RПКАЯ RПКАК RПКАЯ (i, j) RПКАK (i, j) , (3) де RПКАЯ (i, j) та RПКАK (i, j) елементи розрахованих ВФ по полях яскравості і контрасту, які одержані при однакових розмірах ЕЗ і однаковому зсуві неспотвореного ПЗ відносно ЕЗ. Такий спосіб обчислення ВФ справедливий за відсутності спотворень ПЗ, при якій універсальний показник якості і його елементи дорівнюють одиниці. За наявності спотворень результат формування полів по кожному з інформативних параметрів (ІП), відповідно до (1), (2), представлений у вигляді R(i, j) R(i, j) R(i, j) . (4) Для формування вирішальних функцій R i R використовується одне і те ПКАЯ (i, j) ПКАK (i, j) саме ЕЗ, при формуванні якого забезпечується максимум коефіцієнта взаємної кореляції по сукупності ІП. Вирішальна функція з використанням сукупності ІП яскравості та контрасту представлена виразом . (5) R R ВФ ПКАЯ R ПКАК R ПКАЯ (i, j) R ПКАK (i, j) У такому випадку R (r ) RВФ (r ) RПКАЯ RПКАК RПКАЯ RПКАК RВФ , (6) ВФ де RВФ (r ) - ВФ при відсутності спотворень, що визначається для ВЗ та ЕЗ; RПКАЯ RПКАК RПКАЯ(i, j)RПКАK (i, j) ; RПКАЯ RПКАК RПКАЯ(i, j)RПКАK (i, j) ; 25 30 35 40 45 - визначають вплив спотворень на RВФ RПКАЯ RПКАК RПКАЯ(i, j)RПКАK (i, j) результат формування ВФ. Відповідно до одержаного результату (6) у процесі формування ВФ по сукупності полів яскравості та контрасту відбувається зважування складових ВФ, які відповідають спотворенням ПВ. Оскільки для формування часткових ВФ R та R як ЕЗ використовується одне і те ПКАЯ ПКАK саме зображення, то це означає, що у випадку формування КЕСН унімодальної ВФ, максимуми та R мають приблизно однакове розташування у площині ПВ, а бокові пелюстки R ПКАЯ ПКАK часткових ВФ мають різний розподіл на площині ПВ та при формуванні ВФ відповідно до (5) мають менший рівень порівняно з випадками окремого полів яскравості та контрасту. Таким чином зважування складових ВФ по полях яскравості, контрасту та їх сукупності дозволяє формувати команди на корекцію траєкторії КЕСН ЛА в умовах різних типів спотворень поверхні візування, що обумовлені впливом перешкод, застосуванням засобів зниження помітності об'єктів, а також сезонних, кліматичних і добових змін в районі прив'язки. Розроблений спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі використання сукупності інформативних полів передбачає виконання всіх процедур машинним способом, що дозволить скоротити інтервал часу між здобуттям вихідних даних і формуванням польотного завдання. Джерела інформації: 1. Баклицкий В.К. Корреляционно-экстремальные методы навигации и наведения / В.К. Баклицкий - Тверь: ТО "Книжный клуб", 2009. - 360 с. 2. Horn R. Topics in Matrix Analysis / R. Horn, C. Johnson. - Cambridge: CambridgeUniversity Press, 1994. - 604 p. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі використання сукупності інформативних полів, який полягає у застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних 2 UA 113791 U матриць інтенсивності), при цьому вимірюється або відстань між зображеннями, або міра їх близькості, який відрізняється тим, що додатково використовуються зважування складових вирішальних функцій по полях яскравості, контрасту та їх сукупності. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 1/32
Мітки: сукупності, основі, точності, літальних, спосіб, забезпечення, інформативних, апаратів, місцевизначення, полів, імовірності, використання
Код посилання
<a href="https://ua.patents.su/5-113791-sposib-zabezpechennya-tochnosti-ta-imovirnosti-misceviznachennya-litalnikh-aparativ-na-osnovi-vikoristannya-sukupnosti-informativnikh-poliv.html" target="_blank" rel="follow" title="База патентів України">Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі використання сукупності інформативних полів</a>
Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінки варіацій інформативних полів поверхні візування
Номер патенту: 113789
Опубліковано: 10.02.2017
Автори: Танцюра Олександр Борисович, Рибалка Григорій Валерійович, Сотніков Олександр Михайлович, Єрьоміна Наталія Сергіївна, Таршин Володимир Анатолійович, Сидоренко Руслан Григорович
МПК: G01S 1/32
Мітки: апаратів, інформативних, точності, місцевизначення, візування, забезпечення, основі, оцінки, спосіб, варіацій, поверхні, імовірності, полів, літальних
Формула / Реферат:
Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінки варіацій інформативних полів поверхні візування, який полягає у застосуванні класичного кореляційного алгоритму, який використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності), при цьому вимірюється або відстань між зображеннями, або...
Спосіб виділення інформативних ділянок зображень на основі теорії фрактального аналізу
Номер патенту: 100560
Опубліковано: 27.07.2015
Автори: Сотніков Олександр Михайлович, Мегельбей Ганна Василівна, Лупандін Володимир Анатолійович, Ковальчук Віктор Анатолійович, Таршин Володимир Анатолійович, Пєвцов Геннадій Володимирович, Сидоренко Руслан Григорович
МПК: G01S 1/32
Мітки: інформативних, фрактального, зображень, спосіб, основі, теорії, ділянок, аналізу, виділення
Формула / Реферат:
Спосіб виділення інформативних ділянок зображень на основі теорії фрактального аналізу, який полягає у локалізації інформативних областей зображень та виділенні ділянок зображень унікального топологічного складу з максимальною яскравістю шляхом побудови селективних зображень в заданому діапазоні фрактальної розмірності Dmin.≤D≤Dmax., який відрізняється тим, що додатково використовуються спільні результати фрактального та...
Спосіб забезпечення безпеки польотів літальних апаратів та пристрій для його здійснення
Номер патенту: 26552
Опубліковано: 11.10.1999
Автори: Шазель Ксав'є, Уно Анне-Марі, Лепер Жерар
МПК: G05D 1/00, G01S 13/94, B64D 45/00, G01C 21/00, G01S 5/14, G08G 5/00
Мітки: здійснення, польотів, літальних, забезпечення, пристрій, спосіб, апаратів, безпеки
Формула / Реферат:
1. Способ обеспечения безопасности полетов летательных аппаратов (ЛА), содержащий актуализацию наземной базы данных о местности, описывающей по меньшей мере значительную часть поверхности земного шара, включающую этапы занесения информации, извлекаемой из наземного файла и содержащего данные о по меньшей мере значительной части поверхности земного шара, в массовую память в виде структуры базы данных, построения в массовой памяти по крайней...
Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів
Номер патенту: 56943
Опубліковано: 15.05.2003
Автори: Пашков Дмитро Павлович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович
МПК: H03G 5/00
Мітки: літальних, нижніх, кутового, частот, автосупроводження, апаратів, стійкості, фільтр, підвищення, точності
Формула / Реферат:
Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів, що включає блоки віднімання, додавання, множення і інтегрування, який відрізняється тим, що на вході фільтра встановлений блок віднімання з вхідним зв'язком С введення значення прогнозованої динамічної похибки на підставі інформації з каналу кутової швидкості, а між виходом блока додавання та входом блока інтегрування послідовно включений...
Фільтр нижніх частот для підвищення стійкості і точності автосупроводження літальних апаратів за дальністю
Номер патенту: 26104
Опубліковано: 10.09.2007
Автори: Костенко Ігор Леонідович, Третяк В'ячеслав Федорович, Альошин Геннадій Васильович, Кітов Вадим Станіславович, Хударковський Костянтин Ігорович, Баранник Володимир Вікторович, Кудряшов Віктор Євгенійович, Бєлімов Володимир Васильович, Коломійцев Олексій Володимирович
МПК: H03G 5/00
Мітки: літальних, апаратів, автосупроводження, фільтр, частот, точності, дальністю, стійкості, нижніх, підвищення
Формула / Реферат:
Фільтр нижніх частот для підвищення стійкості і точності автосупрово-дження літальних апаратів за дальністю, що містить блоки віднімання, додавання, множення, інтегрування, який відрізняється тим, що додатково введені блок формування підсумкової зваженої оцінки радіальної швидкості А з вхідним зв’язком В - введенням інформації від каналу вимірювання радіальної швидкості, та блок віднімання із вхідним зв'язком С - введенням значення...
Попередній патент: Спосіб біологічного очищення фенольних стічних вод
Наступний патент: Спосіб інтрамедулярного остеосинтезу переломів проксимального відділу стегнової кістки
Випадковий патент: Спосіб виготовлення напою з ядер волоського горіха