Фільтр нижніх частот для підвищення стійкості і точності автосупроводження літальних апаратів за дальністю
Номер патенту: 26104
Опубліковано: 10.09.2007
Автори: Баранник Володимир Вікторович, Костенко Ігор Леонідович, Бєлімов Володимир Васильович, Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Кітов Вадим Станіславович, Третяк В'ячеслав Федорович, Кудряшов Віктор Євгенійович, Хударковський Костянтин Ігорович
Формула / Реферат
Фільтр нижніх частот для підвищення стійкості і точності автосупрово-дження літальних апаратів за дальністю, що містить блоки віднімання, додавання, множення, інтегрування, який відрізняється тим, що додатково введені блок формування підсумкової зваженої оцінки радіальної швидкості А з вхідним зв’язком В - введенням інформації від каналу вимірювання радіальної швидкості, та блок віднімання із вхідним зв'язком С - введенням значення динамічної похибки, що прогнозується, на підставі інформації з каналу вимірювання радіальної швидкості.
Текст
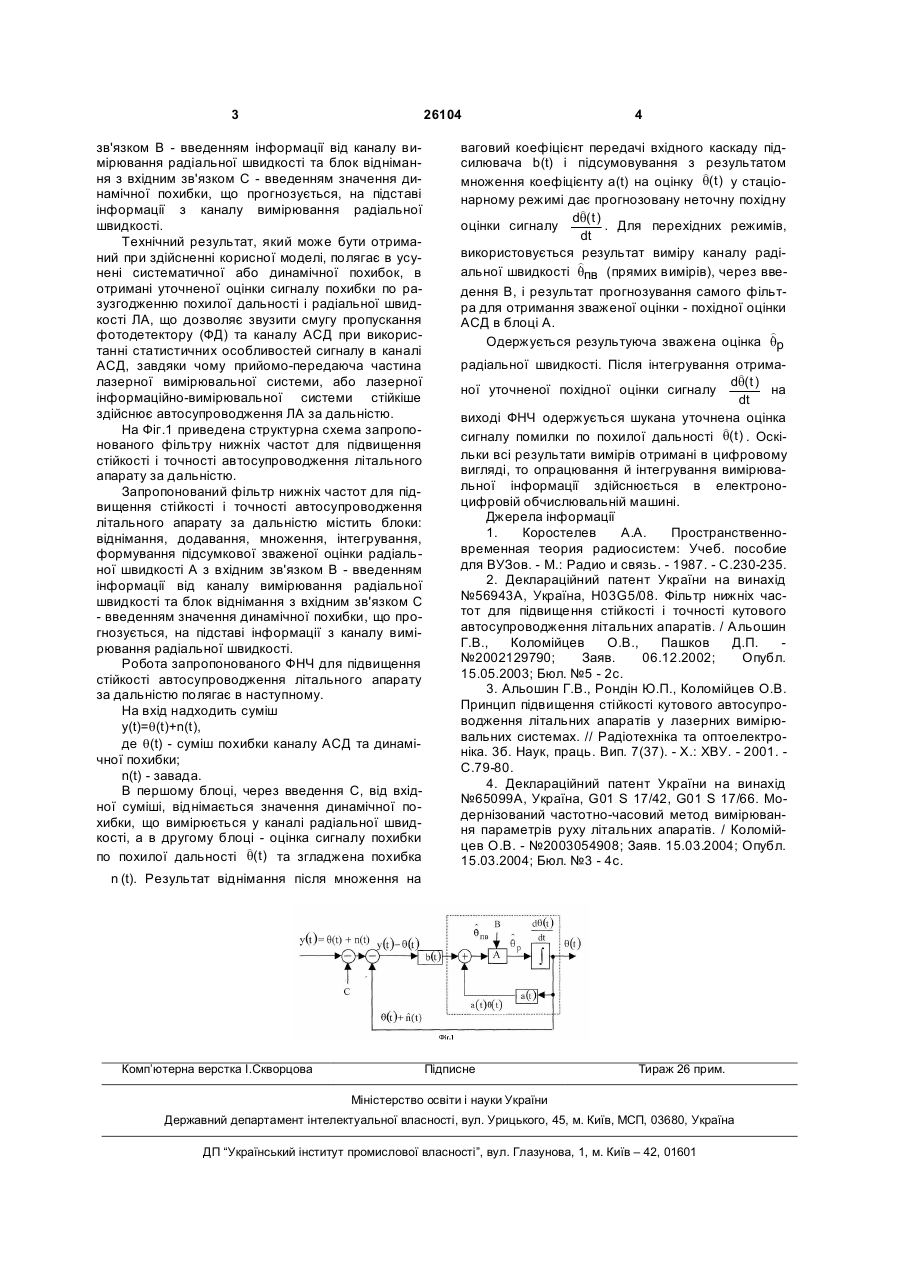
Фільтр нижніх частот для підвищення стійкості і точності автосупрово-дження літальних апаратів за дальністю, що містить блоки віднімання, додавання, множення, інтегрування, який відрізняється тим, що додатково введені блок формування підсумкової зваженої оцінки радіальної швидкості А з вхідним зв’язком В - введенням інформації від каналу вимірювання радіальної швидкості, та блок віднімання із вхідним зв'язком С - введенням значення динамічної похибки, що прогнозується, на підставі інформації з каналу вимірювання радіальної швидкості. (19) (21) u200700047 (22) 02.01.2007 (24) 10.09.2007 (46) 10.09.2007, Бюл. № 14, 2007 р. (72) Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Баранник Володимир Вікторович, Бєлімов Володимир Васильович, Кудряшов Віктор Євгенійович, Костенко Ігор Леонідович, Третяк В'ячеслав Федорович, Хударковський Костянтин Ігорович, Кітов Вадим Станіславович (73) ХАРКІВСЬКИЙ УНІВЕРСИТЕТ ПОВІТРЯНИХ СИЛ ІМЕНІ ІВАНА КОЖЕДУБА 3 26104 зв'язком В - введенням інформації від каналу вимірювання радіальної швидкості та блок віднімання з вхідним зв'язком С - введенням значення динамічної похибки, що прогнозується, на підставі інформації з каналу вимірювання радіальної швидкості. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає в усунені систематичної або динамічної похибок, в отримані уточненої оцінки сигналу похибки по разузгодженню похилої дальності і радіальної швидкості ЛА, що дозволяє звузити смугу пропускання фотодетектору (ФД) та каналу АСД при використанні статистичних особливостей сигналу в каналі АСД, завдяки чому прийомо-передаюча частина лазерної вимірювальної системи, або лазерної інформаційно-вимірювальної системи стійкіше здійснює автосупроводження ЛА за дальністю. На Фіг.1 приведена структурна схема запропонованого фільтру нижніх частот для підвищення стійкості і точності автосупроводження літального апарату за дальністю. Запропонований фільтр нижніх частот для підвищення стійкості і точності автосупроводження літального апарату за дальністю містить блоки: віднімання, додавання, множення, інтегрування, формування підсумкової зваженої оцінки радіальної швидкості А з вхідним зв'язком В - введенням інформації від каналу вимірювання радіальної швидкості та блок віднімання з вхідним зв'язком С - введенням значення динамічної похибки, що прогнозується, на підставі інформації з каналу вимірювання радіальної швидкості. Робота запропонованого ФНЧ для підвищення стійкості автосупроводження літального апарату за дальністю полягає в наступному. На вхід надходить суміш y(t)=q(t)+n(t), де q(t) - суміш похибки каналу АСД та динамічної похибки; n(t) - завада. В першому блоці, через введення С, від вхідної суміші, віднімається значення динамічної похибки, що вимірюється у каналі радіальної швидкості, а в другому блоці - оцінка сигналу похибки ) по похилої дальності q( t ) та згладжена похибка 4 ваговий коефіцієнт передачі вхідного каскаду підсилювача b(t) і підсумовування з результатом ) множення коефіцієнту a(t) на оцінку q( t ) у стаціонарному режимі дає прогнозовану неточну похідну ) dq( t ) оцінки сигналу . Для перехідних режимів, dt використовується результат виміру каналу раді) & альної швидкості qпв (прямих вимірів), через введення В, і результат прогнозування самого фільтра для отримання зваженої оцінки - похідної оцінки АСД в блоці А. ) & Одержується результуюча зважена оцінка qp радіальної швидкості. Після інтегрування отрима) dq( t ) ної уточненої похідної оцінки сигналу на dt виході ФНЧ одержується шукана уточнена оцінка ) сигналу помилки по похилої дальності q( t ) . Оскільки всі результати вимірів отримані в цифровому вигляді, то опрацювання й інтегрування вимірювальної інформації здійснюється в електроноцифровій обчислювальній машині. Джерела інформації 1. Коростелев А.А. Пространственновременная теория радиосистем: Учеб. пособие для ВУЗов. - М.: Радио и связь. - 1987. - С.230-235. 2. Деклараційний патент України на винахід №56943А, Україна, H03G5/08. Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів. / Альошин Г.В., Коломійцев О.В., Пашков Д.П. №2002129790; Заяв. 06.12.2002; Опубл. 15.05.2003; Бюл. №5 - 2с. 3. Альошин Г.В., Рондін Ю.П., Коломійцев О.В. Принцип підвищення стійкості кутового автосупроводження літальних апаратів у лазерних вимірювальних системах. // Радіотехніка та оптоелектроніка. 3б. Наук, праць. Вип. 7(37). - X.: ХВУ. - 2001. С.79-80. 4. Деклараційний патент України на винахід №65099А, Україна, G01 S 17/42, G01 S 17/66. Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів. / Коломійцев О.В. - №2003054908; Заяв. 15.03.2004; Опубл. 15.03.2004; Бюл. №3 - 4с. n (t). Результат віднімання після множення на Комп’ютерна верстка І.Скворцова Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюLow-frequency filter used to raise stability and precision of aircrafts depending on the distance
Автори англійськоюKolomiitsev Oleksii Volodymyrovych, Alioshyn Hennadii Vasyliovych, Barannyk Volodymyr Viktorovych, Bielimov Volodymyr Vasyliovych, Kudriashov Viktor Yevheniiovych, Kostenko Ihor Leonidovych, Tretiak Viacheslav Fedorovych, Khudarkovskyi Kostiantyn Ihorovych, Kitov Vadym Stanislavovych
Назва патенту російськоюФильтр нижних частот для повышения стойкости и точности автосопровождения летательных аппаратов в зависимости от дальности
Автори російськоюКоломийцев Алексей Владимирович, Алешин Геннадий Васильевич, Баранник Владимир Викторович, Белимов Владимир Васильевич, Кудряшов Виктор Евгеньевич, Костенко Игорь Леонидович, Третьяк Вячеслав Федорович, Хударковский Константин Игоревич, Китов Вадим Станиславович
МПК / Мітки
МПК: H03G 5/00
Мітки: нижніх, підвищення, стійкості, частот, апаратів, дальністю, літальних, автосупроводження, точності, фільтр
Код посилання
<a href="https://ua.patents.su/2-26104-filtr-nizhnikh-chastot-dlya-pidvishhennya-stijjkosti-i-tochnosti-avtosuprovodzhennya-litalnikh-aparativ-za-dalnistyu.html" target="_blank" rel="follow" title="База патентів України">Фільтр нижніх частот для підвищення стійкості і точності автосупроводження літальних апаратів за дальністю</a>
Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів
Номер патенту: 56943
Опубліковано: 15.05.2003
Автори: Пашков Дмитро Павлович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович
МПК: H03G 5/00
Мітки: літальних, стійкості, підвищення, кутового, апаратів, точності, нижніх, фільтр, автосупроводження, частот
Формула / Реферат:
Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів, що включає блоки віднімання, додавання, множення і інтегрування, який відрізняється тим, що на вході фільтра встановлений блок віднімання з вхідним зв'язком С введення значення прогнозованої динамічної похибки на підставі інформації з каналу кутової швидкості, а між виходом блока додавання та входом блока інтегрування послідовно включений...
Фільтр нижніх частот

Номер патенту: 12960
Опубліковано: 15.03.2006
Автори: Трембовецька Руслана Володимирівна, Раєвський Микола Володимирович, Шарапов Валерій Михайлович
МПК: H03H 7/01
Формула / Реферат:
Фільтр нижніх частот, що містить операційний підсилювач, дві Т-подібні ланки та ємнісний елемент, причому Т-подібні ланки складені з послідовно з'єднаних резистивних елементів у повздовжніх плечах та ємнісних елементів у поперечних плечах, ланцюг зворотного зв'язку утворений Т-подібною ланкою та ємнісним елементом, які підключено паралельно, інша Т-подібна ланка підключена до інвертуючого входу операційного підсилювача, який відрізняється...
Фільтр нижніх частот

Номер патенту: 12959
Опубліковано: 15.03.2006
Автори: Трембовецька Руслана Володимирівна, Шарапов Валерій Михайлович, Раєвський Микола Володимирович
МПК: H03H 7/01
Формула / Реферат:
Фільтр нижніх частот, що містить операційний підсилювач, Т-подібну ланку, резистор зворотнього зв’язку та ємнісний елемент, причому Т-подібна ланка підключена до інвертуючого входу підсилювача та утворена з послідовно з’єднаних резистивних елементів в повздовжньому плечі та ємнісного елемента в поперечному плечі, а ланцюг зворотнього зв’язку утворений резистивним елементом, який підключено між виходом операційного підсилювача та точкою...
Фільтр нижніх частот

Номер патенту: 8513
Опубліковано: 15.08.2005
Автори: Шарапов Валерій Михайлович, Раєвський Микола Володимирович, Трембовецька Руслана Володимирівна
МПК: H03H 7/01
Формула / Реферат:
Фільтр нижніх частот, що містить Г-подібну ланку, що утворена послідовно з'єднаним резистором і ємнісним елементом в повздовжньому плечі та ємнісним елементом в поперечному плечі, який відрізняється тим, що як ємнісні елементи використовуються асиметричні біморфні п'єзоелектричні елементи.
Фільтр нижніх частот
Номер патенту: 12963
Опубліковано: 15.03.2006
Автори: Раєвський Микола Володимирович, Трембовецька Руслана Володимирівна, Шарапов Валерій Михайлович
МПК: H03H 7/01
Формула / Реферат:
Фільтр нижніх частот містить операційний підсилювач, який відрізняється тим, що містить дві Г-подібні ланки, а як ємнісні елементи у Г-подібних ланках використано п'єзоелектричні елементи, причому кожна Г-подібна ланка складається з послідовно з'єднаних резистивного та п'єзоелектричного елементів у повздовжньому плечі та п'єзоелектричного елемента в поперечному плечі, одна Г-подібна ланка утворює ланцюг зворотного зв'язку, інша підключена до...
Попередній патент: Спосіб прогнозування вмісту білкових сполук в зернових культурах
Наступний патент: Спосіб оптимізації буріння свердловин по обводнених і поглинаючих пісках
Випадковий патент: Косарка ротаційна