Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів
Номер патенту: 56943
Опубліковано: 15.05.2003
Автори: Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Пашков Дмитро Павлович
Формула / Реферат
Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів, що включає блоки віднімання, додавання, множення і інтегрування, який відрізняється тим, що на вході фільтра встановлений блок віднімання з вхідним зв'язком С введення значення прогнозованої динамічної похибки на підставі інформації з каналу кутової швидкості, а між виходом блока додавання та входом блока інтегрування послідовно включений блок формування підсумкової зваженої оцінки кутової швидкості А з вхідним зв'язком В введення вимірювальної інформації від каналу кутової швидкості.
Текст
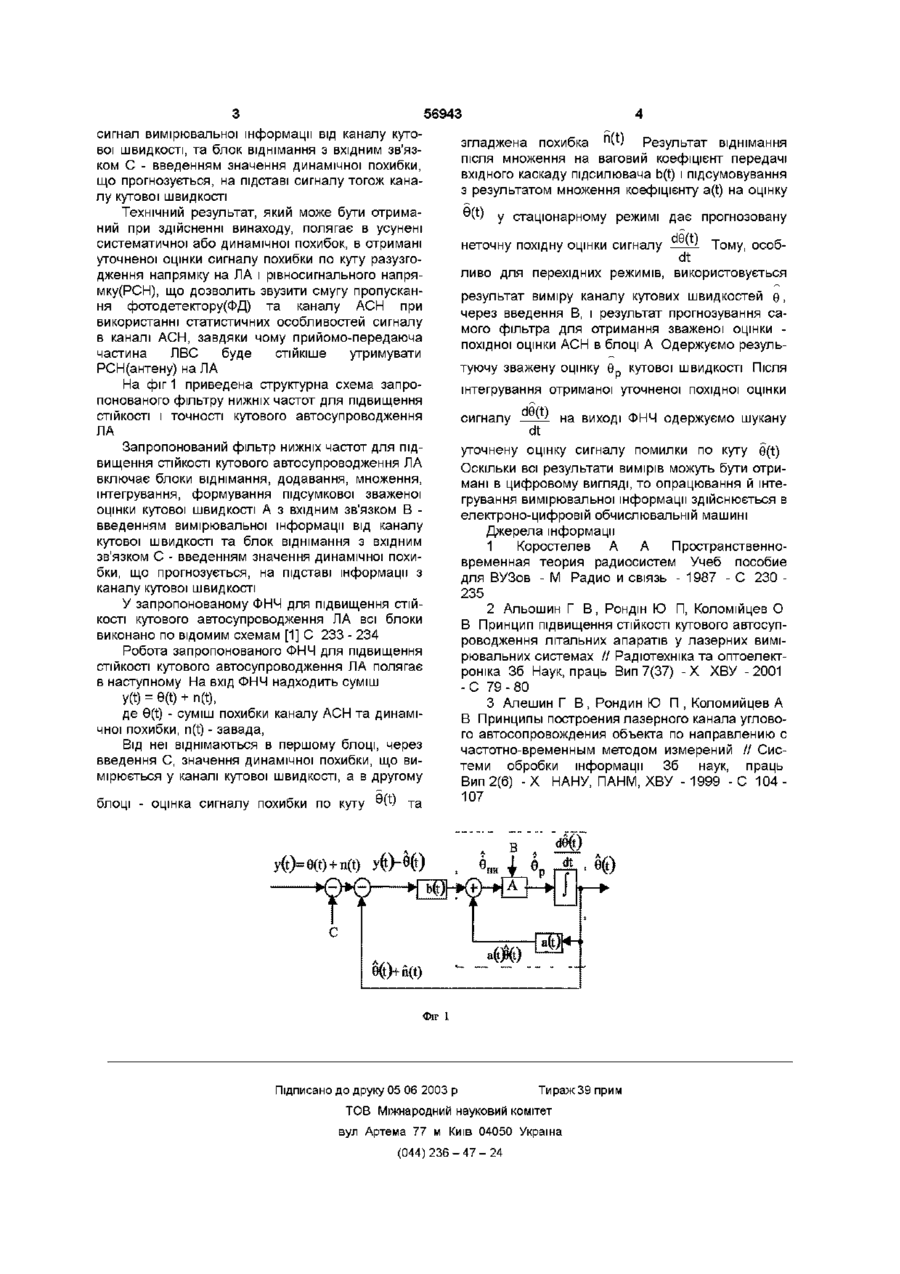
Фільтр нижніх частот для підвищення СТІЙКОСТІ І точності кутового автосупроводження літальних апаратів, що включає блоки віднімання, додаван ня, множення і інтегрування, який відрізняється тим, що на вході фільтра встановлений блок віднімання з вхідним зв'язком С введення значення прогнозованої динамічної похибки на підставі інформації з каналу кутової швидкості, а між виходом блока додавання та входом блока інтегрування послідовно включений блок формування підсумкової зваженої оцінки кутової швидкості А з вхідним зв'язком В введення вимірювальної інформації від каналу кутової швидкості Запропонований винахід відноситься до області лазерних систем і може бути використаний у каналі автоматичного супроводження літального апарата(ЛА) за напрямком(АСН) лазерної вимірювальної системи(ЛВС) з модернізованим частотночасовим методом(ЧЧМ) вимірювання для підвищення СТІЙКОСТІ кутового автосупроводження та точності вимірювання параметрів руху(ВПР) ЛА Найбільш близьким до запропонованого технічним рішенням, обраним як прототип є одномірний фільтр Калмана-Бьюсі для центрованого процесу [1], який включає блоки віднімання, додавання, множення і інтегрування У фільтрі забезпечується фільтрація вхідного сигналу, яка моделюється на основі рішення диференціальних рівнянь із заданими початковими умовами, та використовує критерій оптимізацм - мінімум дисперсії помилки фільтрації Робота одномірного фільтра Калмана-Бьюсі полягає в наступному Використовуя одномірний фільтр Калмана-Бьюсі у каналі АСН, з вхіду суміші сигналу і шуму y(t) = 6(t) + n(t), де 9(t) - кутова швидкість ЛА, n(t) - шум, віднімається оцінка сигналу §(t) Результат віднімання після множення на змінюючийся ваговий коефіцієнт b(t) і додавання з оцінкою сигналу, помноженою на змінюючийся коефіцієнт a(t), дає похідну оцінки, після інтегрування якої на виході отримується необхідна оцінка сигналу §(t) Недоліками відомого фільтру-прототипу є те, що він, по-перше, завдяки інтегратору накопичує систематичну похибку, по-друге реалізація фільтру, знов-таки завдяки інтегратору, природно затримує оцінку сигналу в ланцюгу зворотного зв'язку, по-третє, по суті фільтр на вході інтегратору прогнозує кутову швидкість, але ЧЧМ вимірювання дає можливість її виміряти Похибка прогнозу неприпустимо велика порівняно з похибкою вимірювання, особливо на початку будь-якого збурення, що може привести до зриву авто-супроводження ЛА Отже, завдяки зворотнім зв'язкам, значною може виявитися динамічна помилка, через яку застосування відомого фільтру-прототипу взагалі неправомірне В основу винаходу поставлена задача створити фільтр нижніх частот(ФНЧ) для підвищення СТІЙКОСТІ і точності кутового автосупроводження ЛА завдяки компенсації динамічної і флуктуаційної помилок та підвищення відношення сигнал/шум шляхом формування зваженої оцінки сигналу кутової швидкості ЛА і використання значення динамічної похибки, що прогнозується [2] Застосування модернізованого ЧЧМ вимірів дозволяє, використовувати результати вимірів кутової швидкості ЛА у пропонуємому ФНЧ в каналі АСН [3] Поставлена задача вирішується за рахунок того, що в відомий одномірний фільтр КалманаБьюсі [1], додатково внесено блок формування А підсумкової зваженої прогнозованої та вимірювальної своїм каналом оцінок кутової швидкості, де В CO (О Ю 56943 сигнал вимірювальної інформації від каналу кутової швидкості, та блок віднімання з вхідним зв'язком С - введенням значення динамічної похибки, що прогнозується, на підставі сигналу тогож каналу кутової швидкості Технічний результат, який може бути отриманий при здійсненні винаходу, полягає в усунені систематичної або динамічної похибок, в отримані уточненої оцінки сигналу похибки по куту разузгодження напрямку на ЛА і рівносигнального напрямку(РСН), що дозволить звузити смугу пропускання фотодетектору(ФД) та каналу АСН при використанні статистичних особливостей сигналу в каналі АСН, завдяки чому прийомо-передаюча частина ЛВС буде стійкіше утримувати РСН(антену) наЛА На фіг 1 приведена структурна схема запропонованого фільтру нижніх частот для підвищення СТІЙКОСТІ і точності кутового автосупроводження ЛА Запропонований фільтр нижніх частот для підвищення СТІЙКОСТІ кутового автосупроводження ЛА включає блоки віднімання, додавання, множення, інтегрування, формування підсумкової зваженої оцінки кутової швидкості А з вхідним зв'язком В введенням вимірювальної інформації від каналу кутової швидкості та блок віднімання з вхідним зв'язком С- введенням значення динамічної похибки, що прогнозується, на підставі інформації з каналу кутової швидкості У запропонованому ФНЧ для підвищення СТІЙКОСТІ кутового автосупроводження ЛА всі блоки виконано по відомим схемам [1] С 233 - 234 Робота запропонованого ФНЧ для підвищення СТІЙКОСТІ кутового автосупроводження ЛА полягає в наступному На вхід ФНЧ надходить суміш y(t) = 6(t) + n(t), де 9(t) - суміш похибки каналу АСН та динамічної похибки, n(t) - завада, Від неї віднімаються в першому блоці, через введення С, значення динамічної похибки, що вимірюється у каналі кутової швидкості, а в другому блоці - оцінка сигналу похибки по куту y(t)=e(t)*n(t) n згладжена похибка W Результат віднімання після множення на ваговий коефіцієнт передачі вхідного каскаду підсилювача b(t) і підсумовування з результатом множення коефіцієнту a(t) на оцінку °W у стаціонарному режимі дає прогнозовану неточну похідну оцінки сигналу Тому, особ ливо для перехідних режимів, використовується результат виміру каналу кутових швидкостей є, через введення В, і результат прогнозування самого фільтра для отримання зваженої оцінки похідної оцінки АСН в блоці А Одержуємо результуючу зважену оцінку е р кутової швидкості Після інтегрування отриманої уточненої похідної оцінки сигналу на виході ФНЧ одержуємо шукану dt уточнену оцінку сигналу помилки по куту e(t) Оскільки ВСІ результати вимірів можуть бути отримані в цифровому вигляді, то опрацювання й інтегрування вимірювальної інформації здійснюється в електроно-цифровій обчислювальній машині Джерела інформації 1 Коростелев А А Пространственновременная теория радиосистем Учеб пособие для ВУЗов - М Радио и свіязь - 1987 - С 230 235 2 Альошин Г В, Рондш Ю П, Коломшцев О В Принцип підвищення СТІЙКОСТІ кутового автосупроводження літальних апаратів у лазерних вимірювальних системах // Радіотехніка та оптоелектроніка 36 Наук, праць Вип 7(37) -X ХВУ -2001 -С 79-80 3 Алешин Г В, Рондин Ю П , Коломийцев А В Принципы построения лазерного канала углового автосопровождения объекта по направлению с частотно-временным методом измерений // Системи обробки інформації 36 наук, праць Вип 2(6) -X НАНУ, ПАНМ, ХВУ -1999 -С 104107 та y(t)-9(t) ФІГ dt 1 Підписано до друку 05 06 2003 р Тираж 39 прим ТОВ Міжнародний науковий комітет вул Артема 77 м Київ 04050 Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюLow-frequency filter for increasing stability and accuracy of an aircraft angle tracking system
Автори англійськоюAlioshyn Hennadii Vasyliovych, Kolomiitsev Oleksii Volodymyrovych, Pashkov Dmytro Pavlovych
Назва патенту російськоюФильтр нижних частот для повышения устройчивости и точности системы углового сопровождения летательных аппаратов
Автори російськоюАлешин Геннадий Васильевич, Коломийцев Алексей Владимирович, Пашков Дмитрий Павлович
МПК / Мітки
МПК: H03G 5/00
Мітки: підвищення, фільтр, частот, точності, нижніх, літальних, стійкості, автосупроводження, кутового, апаратів
Код посилання
<a href="https://ua.patents.su/2-56943-filtr-nizhnikh-chastot-dlya-pidvishhennya-stijjkosti-i-tochnosti-kutovogo-avtosuprovodzhennya-litalnikh-aparativ.html" target="_blank" rel="follow" title="База патентів України">Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів</a>
Активний смуговий і нижніх частот lrc-фільтр
Номер патенту: 51197
Опубліковано: 15.11.2002
Автори: Головащенко Наталя Вікторівна, Корніловська Наталія Володимирівна, Мороз Олена Анатоліївна, Рогальський Франц Борисович
МПК: H03H 7/01
Мітки: смуговий, активний, lrc-фільтр, частот, нижніх
Формула / Реферат:
Активний смуговий і нижніх частот LRC-фільтр, який є підсилюючим пристроєм для операційного підсилювача з інверсним входом і частотно залежним ланцюгом зворотного зв'язку, який являє собою паралельне підключення один до одного паралельного та ланцюгового резонансних контурів, настроєних на одну і ту ж резонансну частоту, а індуктивність паралельного контуру дорівнює індуктивності ланцюгового контуру і ємність паралельного контуру дорівнює...
Спосіб підвищення точності прицілювання стрілецької зброї
Номер патенту: 37105
Опубліковано: 16.04.2001
Автори: Сенаторов Микола Володимирович, Сенаторов Володимир Миколайович
МПК: F41G 5/00
Мітки: точності, підвищення, спосіб, стрілецької, зброї, прицілювання
Текст:
...сформованої фігури 3. А при виході ока за межі зони Æ2m д має місце чітке бачення частини зображення контуру фігури 3; зокрема, при віддаленні ока від оптичної осі на відстань m (край вихідної зіниці) стрілець бачить близько її чверті. Пучки променів, які відповідають межі поля зору стрільця крізь вихідну зіницю, показані пунктиром з двома стрілками. Тобто, знаходячись в межах зони Æ2m д, око стрільця бачить тільки прицільну сітку 1 (фіг....
Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів з перешкодами
Номер патенту: 50101
Опубліковано: 15.10.2002
Автор: Лялько Віктор Григорович
МПК: G01C 21/00, B64C 19/00
Мітки: літальних, апаратів, перешкодами, спосіб, комбінований, автоматичного, зіткненню, запобігання
Формула / Реферат:
1 .Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів (ЛА) з перешкодами на висотах польоту Нс = Нвд + 400 м і нижче, де: Нс - висота стабілізації ЛА на термін зміни режиму управління; Hвд - висота, обчислена бортовою цифровою обчислювальною машиною (БЦОМ), висота відносна мінімально допустима в момент початку вертикального маневру по запобіганню зіткненню з наземною перешкодою; 400 м - запас висоти на термін...
Спосіб підвищення стійкості гірничих виробок
Номер патенту: 38094
Опубліковано: 15.05.2001
Автори: Клюєв Андрій Петрович, Азаматов Рашид Ільдарович, Касьян Микола Миколайович
МПК: E21D 11/00, E21C 41/16, E21D 13/00
Мітки: стійкості, гірничих, спосіб, виробок, підвищення
Текст:
...При цьому за рахунок збільшення зчеплення зруйновані породи консолідуються в клиноподібну область і відбувається їх самозаклинювання при зміщенні в порожнину виробки між локально зміцненими зонами. Приклад. Після проведення виробки і форму вання зони зруйнованих порід (1) на величину 23м поділяють навколишній масив по периметру виробки на секторні ділянки (наприклад, на 3 секторні ділянки). По межах секторних ділянок формували локально...
Спосіб підвищення професійної стійкості
Номер патенту: 22652
Опубліковано: 07.04.1998
Автори: Коробчанський Володимир Олексійович, Герасименко Ольга Ігоревна
Мітки: професійної, спосіб, підвищення, стійкості
Формула / Реферат:
Спосіб підвищення професійної стійкості, який включає в себе визначення кількісних показників функціонального стану організму, який відрізняється тим, що спрямовано діють фізіолого-гігієнічними заходами на систему організму в процесі формування трудових навиків, при цьому величину впливу визначають по формуліде еіп - стадія фахової адаптації Інформаційної підсистеми;ееп - енергетичної підсистеми.
Попередній патент: Шашка-детонатор
Наступний патент: Пінобетон
Випадковий патент: Спосіб патогенетичного лікування хворих на бронхіальну астму