Вихрострумовий амплітудно-фазовий спосіб неруйнівного контролю
Номер патенту: 118164
Опубліковано: 25.07.2017
Автори: Баженов Віктор Григорович, Гльойнік Костянтин Анатолійович

Формула / Реферат
Вихрострумовий амплітудно-фазовий спосіб неруйнівного контролю, який включає перемноження вимірювального і опорного сигналів з подальшим визначенням амплітуди отриманої постійної складової, який відрізняється тим, що фазу одного із сигналів періодично змінюють на 90 градусів і значення амплітуди і фазового зсуву вимірювального сигналу визначають відповідно як ![]() ,
, ![]() , дe
, дe ![]() значення постійної косинусної складової;
значення постійної косинусної складової;
![]() - значення постійної синусної складової, отриманої після зміни фази сигналу на 90 градусів.
- значення постійної синусної складової, отриманої після зміни фази сигналу на 90 градусів.
Текст
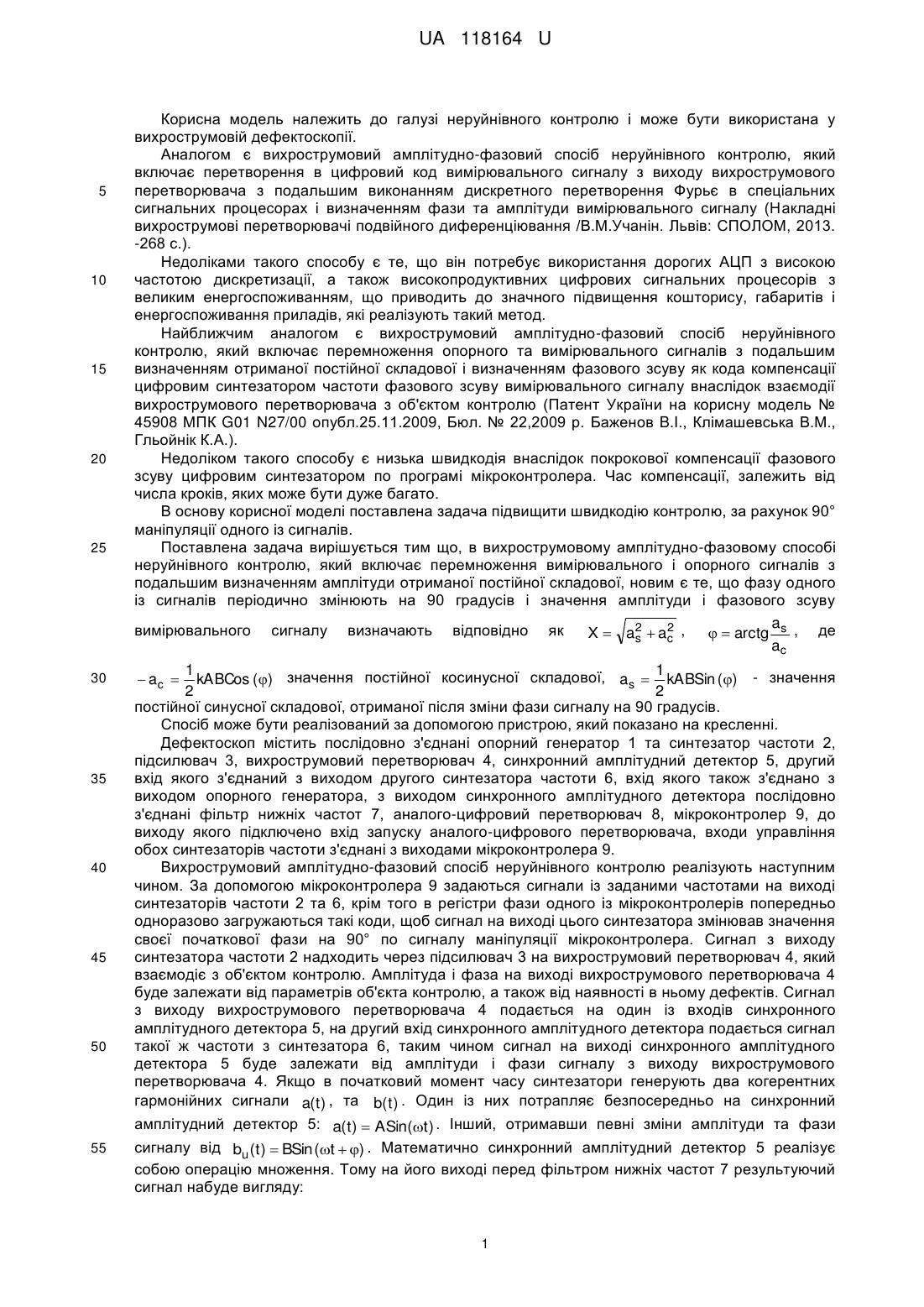
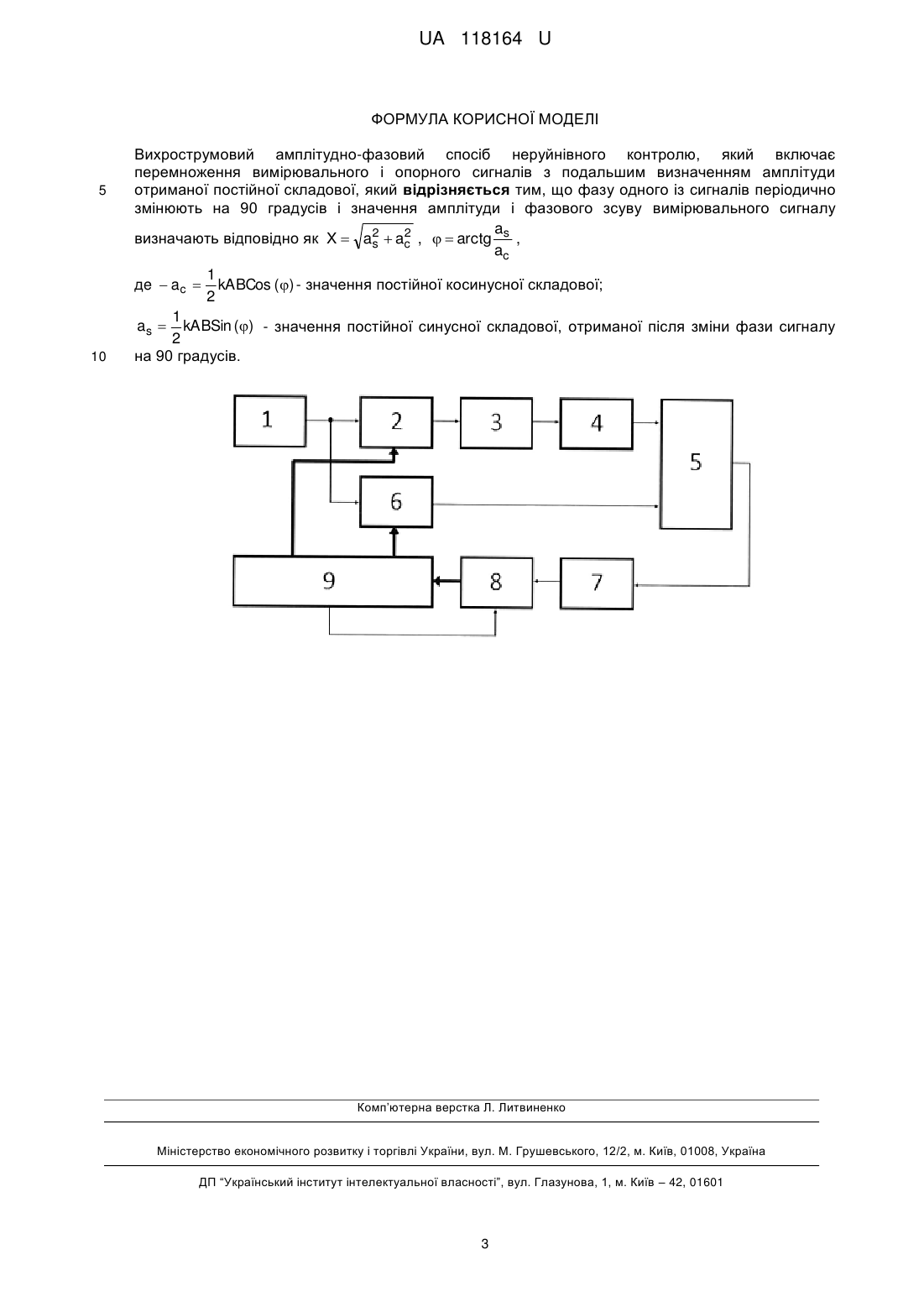
Реферат: UA 118164 U UA 118164 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі неруйнівного контролю і може бути використана у вихрострумовій дефектоскопії. Аналогом є вихрострумовий амплітудно-фазовий спосіб неруйнівного контролю, який включає перетворення в цифровий код вимірювального сигналу з виходу вихрострумового перетворювача з подальшим виконанням дискретного перетворення Фурьє в спеціальних сигнальних процесорах і визначенням фази та амплітуди вимірювального сигналу (Накладні вихрострумові перетворювачі подвійного диференціювання /В.М.Учанін. Львів: СПОЛОМ, 2013. -268 с.). Недоліками такого способу є те, що він потребує використання дорогих АЦП з високою частотою дискретизації, а також високопродуктивних цифрових сигнальних процесорів з великим енергоспоживанням, що приводить до значного підвищення кошторису, габаритів і енергоспоживання приладів, які реалізують такий метод. Найближчим аналогом є вихрострумовий амплітудно-фазовий спосіб неруйнівного контролю, який включає перемноження опорного та вимірювального сигналів з подальшим визначенням отриманої постійної складової і визначенням фазового зсуву як кода компенсації цифровим синтезатором частоти фазового зсуву вимірювального сигналу внаслідок взаємодії вихрострумового перетворювача з об'єктом контролю (Патент України на корисну модель № 45908 МПК G01 N27/00 опубл.25.11.2009, Бюл. № 22,2009 р. Баженов B.I., Клімашевська В.М., Гльойнік К.А.). Недоліком такого способу є низька швидкодія внаслідок покрокової компенсації фазового зсуву цифровим синтезатором по програмі мікроконтролера. Час компенсації, залежить від числа кроків, яких може бути дуже багато. В основу корисної моделі поставлена задача підвищити швидкодію контролю, за рахунок 90° маніпуляції одного із сигналів. Поставлена задача вирішується тим що, в вихрострумовому амплітудно-фазовому способі неруйнівного контролю, який включає перемноження вимірювального і опорного сигналів з подальшим визначенням амплітуди отриманої постійної складової, новим є те, що фазу одного із сигналів періодично змінюють на 90 градусів і значення амплітуди і фазового зсуву a 2 вимірювального сигналу визначають відповідно як X a2 ac , arctg s , де s ac 1 1 kABCos ( ) значення постійної косинусної складової, a s kABSin () - значення 2 2 постійної синусної складової, отриманої після зміни фази сигналу на 90 градусів. Спосіб може бути реалізований за допомогою пристрою, який показано на кресленні. Дефектоскоп містить послідовно з'єднані опорний генератор 1 та синтезатор частоти 2, підсилювач 3, вихрострумовий перетворювач 4, синхронний амплітудний детектор 5, другий вхід якого з'єднаний з виходом другого синтезатора частоти 6, вхід якого також з'єднано з виходом опорного генератора, з виходом синхронного амплітудного детектора послідовно з'єднані фільтр нижніх частот 7, аналого-цифровий перетворювач 8, мікроконтролер 9, до виходу якого підключено вхід запуску аналого-цифрового перетворювача, входи управління обох синтезаторів частоти з'єднані з виходами мікроконтролера 9. Вихрострумовий амплітудно-фазовий спосіб неруйнівного контролю реалізують наступним чином. За допомогою мікроконтролера 9 задаються сигнали із заданими частотами на виході синтезаторів частоти 2 та 6, крім того в регістри фази одного із мікроконтролерів попередньо одноразово загружаються такі коди, щоб сигнал на виході цього синтезатора змінював значення своєї початкової фази на 90° по сигналу маніпуляції мікроконтролера. Сигнал з виходу синтезатора частоти 2 надходить через підсилювач 3 на вихрострумовий перетворювач 4, який взаємодіє з об'єктом контролю. Амплітуда і фаза на виході вихрострумового перетворювача 4 буде залежати від параметрів об'єкта контролю, а також від наявності в ньому дефектів. Сигнал з виходу вихрострумового перетворювача 4 подається на один із входів синхронного амплітудного детектора 5, на другий вхід синхронного амплітудного детектора подається сигнал такої ж частоти з синтезатора 6, таким чином сигнал на виході синхронного амплітудного детектора 5 буде залежати від амплітуди і фази сигналу з виходу вихрострумового перетворювача 4. Якщо в початковий момент часу синтезатори генерують два когерентних гармонійних сигнали a(t ) , та b( t ) . Один із них потрапляє безпосередньо на синхронний ac амплітудний детектор 5: a(t ) ASin(t ) . Інший, отримавши певні зміни амплітуди та фази сигналу від bu (t ) BSin (t ) . Математично синхронний амплітудний детектор 5 реалізує собою операцію множення. Тому на його виході перед фільтром нижніх частот 7 результуючий сигнал набуде вигляду: 1 UA 118164 U a(t ) bu (t ) ASin(t ) BSin (t ) 1 AB[Cos (t t ) Cos (t t )] 2 1 a( t ) bu ( t ) AB[Cos () Cos (2t )] . 2 Результат має дві складових, одна з яких залежить лише від фази і фізично являє собою постійний струм, інша - змінний струм подвійної частоти. Фільтр нижніх частот 7 відфільтровує складову Cos (2t ) і результуючий сигнал має лише складову, залежну від фази: U=0.5ABCos(φ). За допомогою мікроконтролера 9 періодично здійснюють 90° маніпуляцію фази сигналу одного з синтезаторів частоти шляхом подачі сигналу з одного із виводів мікроконтролера. Це буде означати, що постійна складова буде змінюватися на U=0.5АBSin(φ) Таким чином періодично з частотою маніпуляції на виході синхронного амплітудного детектора отримують також періодично постійні складові сигналів, пропорційні відповідним проекціям 1 1 a c kABCos () і a s kABSin () , які відфільтровують і також періодично кодують за 2 2 допомогою ЛЦГІ8 і обробляють мікроконтролером 9. Результат вимірювання амплітуди та фази визначають 2 згідно з відповідними виразами X a2 ac , arctg as . s ac Як випливає з вищесказаного, фактично, при вимірювання зсуву фаз в такому випадку реалізується одноканальний ортогональній метод виміру, який є найбільш точним. При цьому зміна амплітуди визначається як різниця двох вимірів амплітуди до знаходження дефекту і після. Значення фазового зсуву може бути визначено безпосередньо по значенню arctg as , ac якщо початковий фазовий зсув сигналів на вході синхронного амплітудного детектора дорівнював нулю. Використання такого способу реалізації вихрострумових дефектоскопів на базі синтезаторів частоти дозволяє значно (10-100 разів) підвищити швидкодію дефектоскопа, тому що зміна фази на 90° потребує однієї команди для зміни значення одного біта на виході мікроконтролера (замість загрузки двох дванадцятирозрядних слів по послідовному інтерфейсу, щоб виконати один крок зміни фазового зсуву для отримання кода його компенсації при використанні найбільш близького аналогу). Крім того запропонований спосіб для своєї реалізації використовує один вимірювальний канал, що значно спрощує його реалізацію і підвищує точність вимірювання, особливо фази, яка визначається через відношення a s до ac і похибки вимірювального каналу частково компенсуються. Використання синхронного амплітудного детектора 5 дозволяє суттєво підвисити завадостійкість при вимірюванні амплітуди і фази. Як синтезатори частоти можуть бути використані наприклад: мікросхеми AD9834, що реалізовують метод DDS, які мають дуже малі розміри (5×5 мм) та вживають енергії менше 20 мВт. Особливо слід зазначити, що поява швидкодіючих вихрострумових дефектоскопів на базі DDS синтезаторів частоти, керованих сучасними мікроконтролерами значно менших габаритів, з меншим енергоспоживанням, значно дешевших і які не поступаються за швидкодією, точністю, функціональними можливостями сучасним цифровим дефектоскопам на базі потужних DSP процесорів, дозволить їх безпосередньо вбудовувати в автоматичні лінії контролю на підприємствах, а також ще більше поширить розповсюдження вихрострумового контролю для підвищення якості різної продукції. 5 10 15 20 25 30 35 40 2 UA 118164 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Вихрострумовий амплітудно-фазовий спосіб неруйнівного контролю, який включає перемноження вимірювального і опорного сигналів з подальшим визначенням амплітуди отриманої постійної складової, який відрізняється тим, що фазу одного із сигналів періодично змінюють на 90 градусів і значення амплітуди і фазового зсуву вимірювального сигналу a 2 визначають відповідно як X a2 ac , arctg s , s ac дe ac 1 kABCos ( ) - значення постійної косинусної складової; 2 1 kABSin () - значення постійної синусної складової, отриманої після зміни фази сигналу 2 на 90 градусів. as 10 Комп’ютерна верстка Л. Литвиненко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01N 27/00
Мітки: вихрострумовий, спосіб, неруйнівного, контролю, амплітудно-фазовий
Код посилання
<a href="https://ua.patents.su/5-118164-vikhrostrumovijj-amplitudno-fazovijj-sposib-nerujjnivnogo-kontrolyu.html" target="_blank" rel="follow" title="База патентів України">Вихрострумовий амплітудно-фазовий спосіб неруйнівного контролю</a>
Електростатичний одноканальний амплітудно-фазовий спосіб неруйнівного контролю
Номер патенту: 101625
Опубліковано: 25.09.2015
Автори: Овчарук Степан Анатолійович, Грузін Сергій Валерійович, Баженов Віктор Григорович, Івіцька Дар'я Костянтинівна
МПК: G01B 7/00
Мітки: електростатичний, неруйнівного, спосіб, одноканальний, амплітудно-фазовий, контролю
Формула / Реферат:
1. Електростатичний, одноканальний амплітудно-фазовий спосіб неруйнівного контролю, що включає генерацію електростатичного поля шляхом подачі вхідного сигналу заданої частоти на одну пару електродів, реєстрацію індукованого заряду за допомогою других вимірювальних електродів, в якому вимірювальний сигнал визначають як різницю вихідних сигналів однієї та другої пари вимірювальних електродів, а також перемноження опорного та вимірювального...
Електростатичний одноканальний амплітудно-фазовий спосіб неруйнівного контролю
Номер патенту: 112917
Опубліковано: 10.11.2016
Автори: Грузін Сергій Валерійович, Баженов Віктор Григорович, Івіцька Дар'я Костянтинівна, Овчарук Степан Анатолійович
МПК: G01B 7/287, G01B 7/00, G01N 27/22
Мітки: одноканальний, спосіб, неруйнівного, амплітудно-фазовий, контролю, електростатичний
Формула / Реферат:
1. Електростатичний одноканальний амплітудно-фазовий спосіб неруйнівного контролю, який включає генерацію електростатичного поля шляхом подачі вхідного сигналу заданої частоти на одну пару електродів, реєстрацію індукованого заряду за допомогою других вимірювальних електродів, в якому вимірювальний сигнал визначають як різницю вихідних сигналів однієї та другої пари вимірювальних електродів, а також перемноження опорного та вимірювального...
Електростатичний амплітудно-фазовий спосіб неруйнівного контролю
Номер патенту: 93032
Опубліковано: 10.09.2014
Автори: Муненко Василь Леонідович, Івіцька Дар'я Костянтинівна, Баженов Віктор Григорович, Овчарук Степан Анатолійович
МПК: G01B 7/00
Мітки: амплітудно-фазовий, контролю, спосіб, електростатичний, неруйнівного
Формула / Реферат:
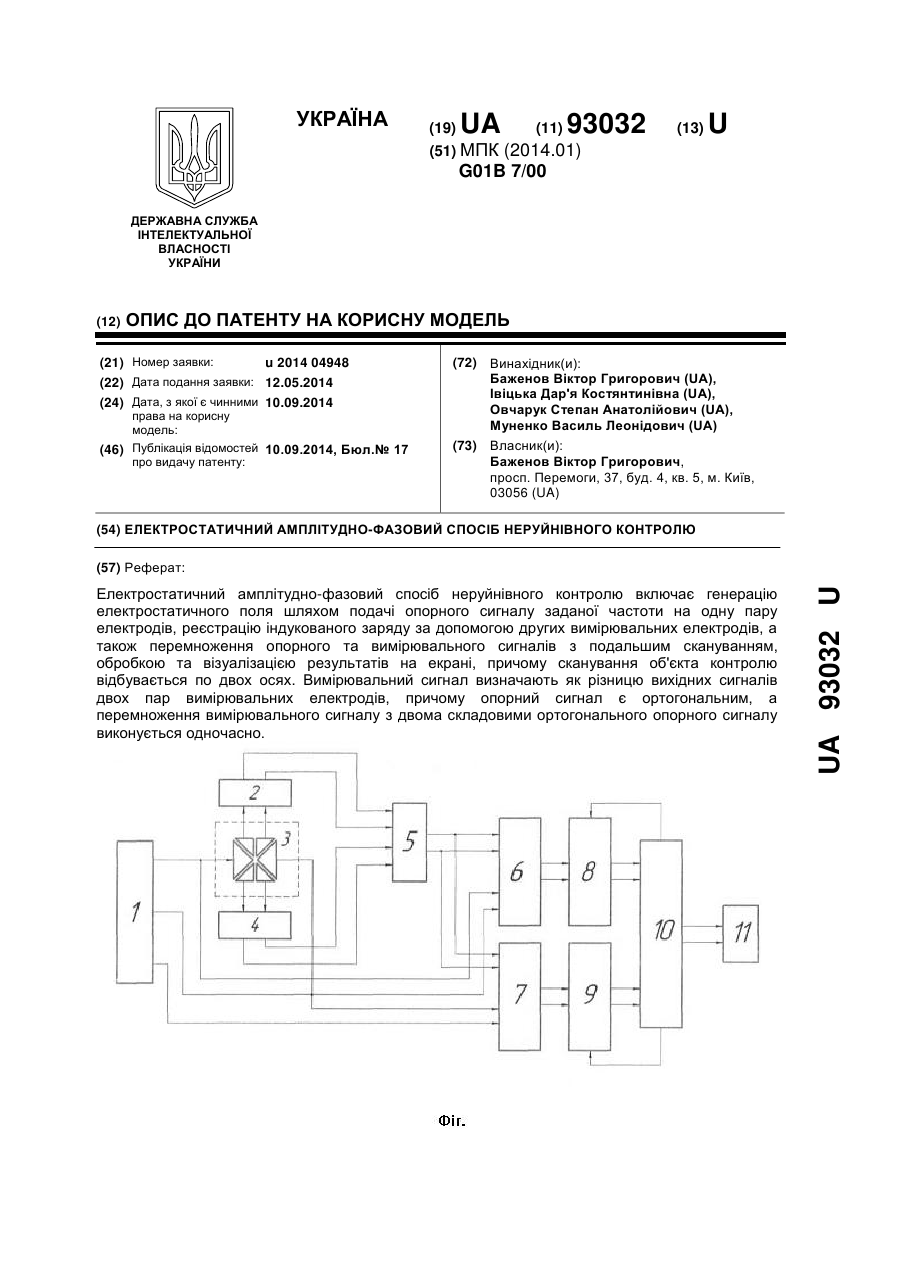
Електростатичний амплітудно-фазовий спосіб неруйнівного контролю, який включає генерацію електростатичного поля шляхом подачі опорного сигналу заданої частоти на одну пару електродів, реєстрацію індукованого заряду за допомогою других вимірювальних електродів, а також перемноження опорного та вимірювального сигналів з подальшим скануванням, обробкою та візуалізацією результатів на екрані, причому сканування об'єкта контролю відбувається по...
Електростатичний амплітудно-фазовий спосіб неруйнівного контролю
Номер патенту: 109357
Опубліковано: 10.08.2015
Автори: Баженов Віктор Григорович, Муненко Василь Леонідович, Івіцька Дар'я Костянтинівна, Овчарук Степан Анатолійович
МПК: G01B 7/00, G01N 27/22
Мітки: амплітудно-фазовий, неруйнівного, контролю, електростатичний, спосіб
Формула / Реферат:
Електростатичний амплітудно-фазовий спосіб неруйнівного контролю, який включає генерацію електростатичного поля шляхом подачі опорного сигналу заданої частоти на одну пару електродів, реєстрацію індукованого заряду за допомогою других вимірювальних електродів, а також перемноження опорного та вимірювального сигналів з подальшим скануванням, обробкою та візуалізацією результатів на екрані, причому сканування об'єкта контролю відбувається по...
Електростатичний спосіб неруйнівного контролю
Номер патенту: 107893
Опубліковано: 25.02.2015
Автори: Івіцька Дар'я Костянтинівна, Баженов Віктор Григорович, Грузін Сергій Валерійович
МПК: G01B 7/00
Мітки: спосіб, електростатичний, контролю, неруйнівного
Формула / Реферат:
Електростатичний спосіб неруйнівного контролю, який включає генерацію електростатичного поля шляхом подачі опорного сигналу заданої частоти на одну пару електродів, реєстрацію індукованого заряду за допомогою других вимірювальних електродів, а також перемноження опорного та вимірювального сигналів з подальшим скануванням, обробкою та візуалізацією результатів на екрані, причому сканування об'єкта контролю відбувається по двох осях, який...
Попередній патент: Снаряд нарізний з лопатями та накопичувальними камерами
Наступний патент: Фундамент під опори ліній електропередач
Випадковий патент: Декоративний годинник