Спосіб гасіння пожежі мобільним роботом
Номер патенту: 120390
Опубліковано: 25.10.2017
Автори: Рибка Євгеній Олексійович, Поспєлов Борис Борисович, Дейнеко Наталя Вікторівна, Андронов Володимир Анатолійович

Формула / Реферат
Спосіб гасіння пожежі мобільним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до неї, здійснюють подачу вогнегасної речовини до осередку горіння, змінюють кут розпилу вогнегасної речовини циклічно в горизонтальній площині, амплітуду кута розпилу вогнегасної речовини адаптують до площі вогнища загоряння, який відрізняється тим, що вимірюють та контролюють температуру від осередку горіння в середовищі, що безпосередньо оточує мобільний робот, порівнюють величину цієї температури з температурою, яка визначає критичну експлуатаційну температуру мобільного робота, при наявності неузгодженості між ними переміщують мобільний робот у напрямку осередку горіння до усунення цієї температурної неузгодженості.
Текст
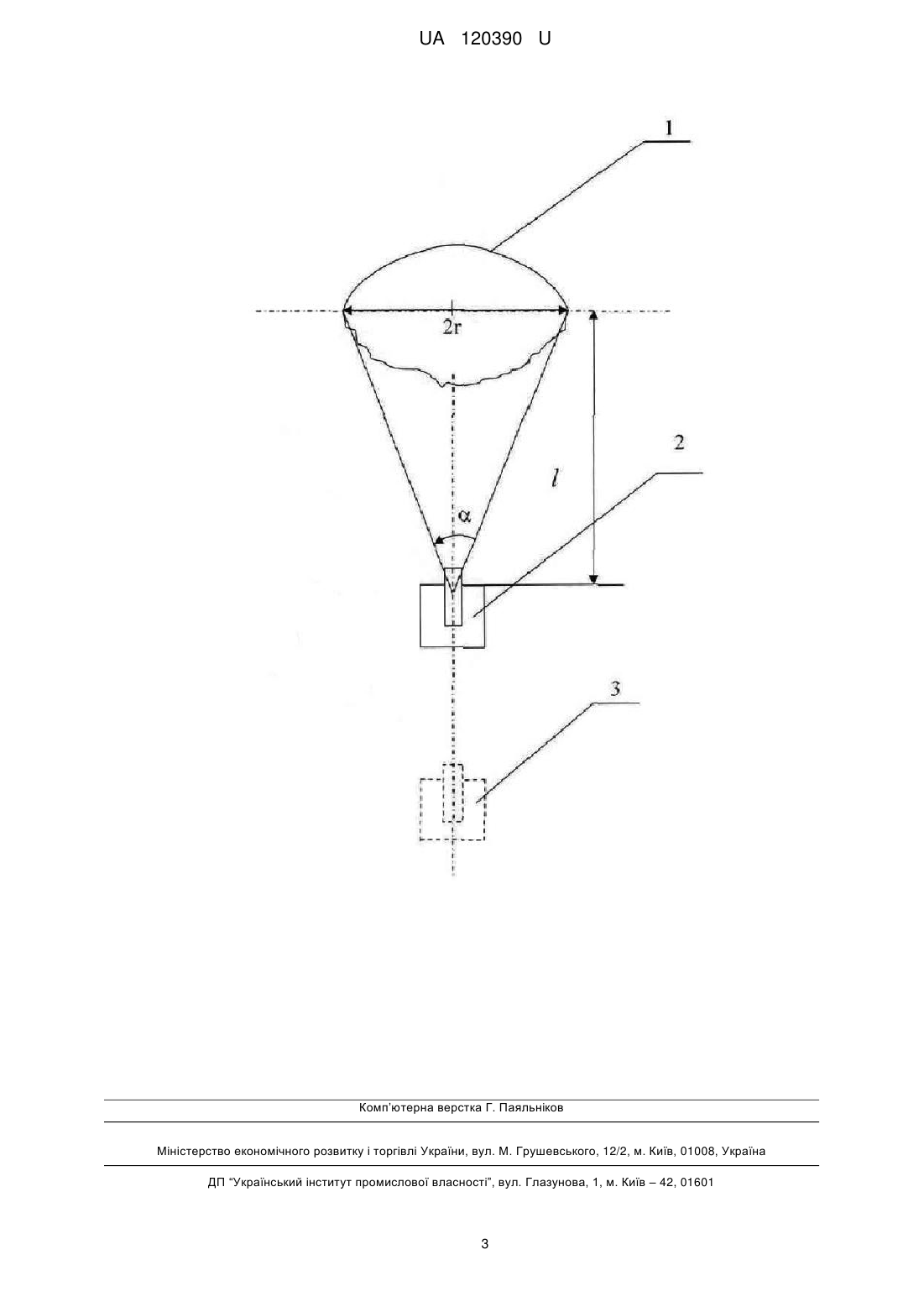
Реферат: Спосіб гасіння пожежі мобільним роботом полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до неї, здійснюють подачу вогнегасної речовини до осередку горіння, змінюють кут розпилу вогнегасної речовини циклічно в горизонтальній площині, амплітуду кута розпилу вогнегасної речовини адаптують до площі вогнища загоряння. Вимірюють та контролюють температуру від осередку горіння в середовищі, що безпосередньо оточує мобільний робот. Порівнюють величину температури осередку горіння з температурою, яка визначає критичну експлуатаційну температуру мобільного робота, при наявності неузгодженості між ними переміщують мобільний робот у напрямку осередку горіння до усунення цієї температурної неузгодженості. UA 120390 U (12) UA 120390 U UA 120390 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області гасіння пожежі із використанням мобільних пожежних роботів. Відомий спосіб гасіння пожежі із використанням мобільного пожежного роботу, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу осередку горіння та відстань від нього, переміщують пожежний робот в робочу позицію і здійснюють подачу вогнегасної речовини до осередку горіння [1]. Недоліком такого способу гасіння пожежі є те, що не повною мірою враховується тепловий потік від осередку горіння для вибору місця розташування пожежного робота, внаслідок чого не завжди здійснюється вибір мінімальної відстані між пожежним роботом та осередком горіння. Це призводить до зниження кількості вогнегасної речовини, що надходить до осередку горіння і, як наслідок, зростає час гасіння пожежі, тобто у цілому знижується ефективність гасіння. Найбільш близьким до способу, що заявляється та обраний нами за прототип є спосіб гасіння пожежі мобільним пожежним роботом [2], який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу вогнища загоряння та відстань до нього, переміщують пожежний робот в робочу позицію і здійснюють подачу вогнегасної речовини до вогнища загоряння, контролюють величину теплового потоку від вогнища загоряння, порівнюють цю величину із апріорі заданою, при наявності неузгодженості між ними перемішують пожежний робот до усунення цієї неузгодженості, змінюють кут розпилу вогнегасної речовини циклічно в горизонтальній площині, а його амплітуду адаптують до площі вогнища загоряння. Недоліком такого способу гасіння пожежі є його недостатня ефективність через те, що оптимальна відстань між мобільним роботом та осередком горіння визначається по величині теплового потоку, яка вимірюється зі значною потенційною похибкою. Величина потенційної похибки вимірювання теплового потоку залежить від потенційних похибок вимірювання температур на відповідних поверхнях допоміжної пластини та визначення різниці цих температур. При цьому похибка різниці температур визначається сумою похибок вимірювання кожної з температур на відповідних поверхнях допоміжної пластини. Крім похибки, обумовленою за рахунок різниці температур, вимірювання теплового потоку здійснюється з додатковою похибкою, що суттєво залежить від того наскільки нормаль до поверхні допоміжної пластини співпадає з напрямом дії теплового потоку, який вимірюється. Вказані чинники будуть призводити до збільшення похибки визначення оптимального положення пожежного робота відносно осередку горіння та оптимальної амплітуди і кута розпилу вогнегасної речовини. Не оптимальне положення мобільного робота відносно осередку горіння, не оптимальний кут розпилу вогнегасної речовини та його амплітуда будуть зменшувати кількість вогнегасної речовини, що надходить до осередку горіння і, як наслідок, зростатиме час гасіння пожежі, тобто у цілому знижується ефективність гасіння. Крім того в окремих випадках похибки визначення положення мобільного робота відносно осередку горіння можуть призводити до виходу роботу із ладу та його непрацездатності щодо гасіння пожежі. В основу технічного рішення поставлено завдання підвищення ефективності гасіння пожежі із використанням мобільних роботів. Зазначена мета досягається за рахунок того, що в способі гасіння пожежі мобільним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до неї, переміщують мобільний робот в робочу позицію, змінюють кут розпилу вогнегасної речовини циклічно в горизонтальній площині, а його амплітуду адаптують до площі вогнища загоряння і здійснюють подачу вогнегасної речовини до осередку горіння, який відрізняється тим, що вимірюють і контролюють температуру від осередку горіння в середовищі, що оточує безпосередньо мобільний робот, порівнюють цю величину температури з величиною, яка відповідає критичній експлуатаційний температурі мобільного робота, та при наявності неузгодженості між ними переміщують пожежний робот до усунення цієї температурної неузгодженості. Це дозволяє на відміну від прототипу переміщувати мобільний робот в робочу позицію з мінімальною потенційною похибкою визначення місця, що визначається лише похибкою вимірювання однієї температури, а не різницею двох температур. При цьому похибка вимірювання температури на залежить від напряму дії теплового потоку від осередку горіння, що забезпечує оптимальність положення пожежного робота відносно осередку горіння, оптимальність амплітуди та кута розпилу вогнегасної речовини, яки підвищуватимуть кількість вогнегасної речовини, що надходить до осередку горіння і, як наслідок, зменшуватимуть час гасіння пожежі, тобто у цілому підвищуватимуть ефективність гасіння. Результат, який може бути одержаний при реалізації технічного рішення, полягає в тому, що внаслідок вимірювання та контролю температури від осередку горіння в середовищі, що оточує 1 UA 120390 U 5 10 15 20 25 30 35 40 безпосередньо мобільний робот, можливе забезпечення оптимальної відстані між мобільним роботом та осередком горіння, амплітуди та куту розпилу вогнегасної речовини, що в цілому підвищують ефективність гасіння пожежі мобільним роботом та забезпечують його надійність та працездатність при гасінні пожежі. На кресленні зображена схема гасіння пожежі із використанням мобільного робота, де зображено: 1 - площа осередку горіння; 2 - мобільний робот у положенні гасіння пожежі; 3 початкове положення мобільного робота відносно площі осередку горіння 1 (зображено штриховою лінією); r - еквівалентний радіус осередку горіння; α - - кут розпилу вогнегасної речовини на відстані для еквівалентного радіусу r площі осередку горіння. Спосіб гасіння пожежі мобільним роботом здійснюється наступним чином. Робот знаходиться в положенні 3, яке позначене штриховою лінією. В цьому положенні виявляють небезпечні чинники пожежі, визначають координати, площу пожежі, а також відстань до неї. Одночасно з цим, вимірюють та контролюють температуру в середовищі, що оточує безпосередньо мобільний робот, від осередку горіння t, порівнюють її величину з температурою, яка є критичною для експлуатації мобільного робота tкр. Якщо виконується умова t < tкр (1) відбувається зміна положення робота та його переміщення у напрямку осередку горіння поки не буде виконуватись умова t=tкр. На відміну від прототипу умова (1) визначається для величини t, яка має суттєве меншу похибку і не залежіть від напряму дії теплового потоку. При цьому величина відстані ℓ стає оптимальною для мобільного робота із заданими експлуатаційними характеристиками tкр. В цьому положенні на відстані ℓ від осередку горіння відбувається зміна кута розпилу α(ℓ) вогнегасної речовини циклічно в горизонтальній площині, а його амплітуду адаптують до площі вогнища загоряння та здійснюється подача вогнегасної речовини до осередку горіння 1. Подача вогнегасної речовини з оптимальної відстані мобільного робота до осередку горіння дозволяє зменшити час гасіння пожежі та витрати вогнегасної речовини, що підвищуватиме ефективність гасіння пожежі у порівнянні з прототипом. Таким чином, вимірювання та контроль температури в середовищі, що оточує безпосередньо мобільний робот, від осередку горіння і порівняння її з температурою, яка є критичною для експлуатації мобільного робота (tкр), зміна положення робота до встановлення оптимальної відстані до осередку горіння, зміна кута розпилу вогнегасної речовини циклічно в горизонтальній площині залежно від ℓ забезпечують доставку вогнегасної речовини до всієї площі осередку горіння, що зменшує час гасіння пожежі та витрати вогнегасної речовини тобто підвищує ефективності гасіння пожежі. Джерела інформації: 1. Горбань Ю.И. Пожарные роботы и ствольная техника в пожарной автоматике и пожарной охране / Ю.И. Горбань. - М.: Пожнаука, 2013. -С.261-262. 2. Пат. 114600 Україна, МПК А 62 С 3/00. Спосіб гасіння пожежі мобільним пожежним роботом / Абрамов Ю.О., Кривцова В.I., СобинаВ.О.; заявник та патентовласник Національний університет цивільного захисту України. - № и201610065; заявл. 03.10.2016; опубл. 10.03.2017, Бюл. №9. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Спосіб гасіння пожежі мобільним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до неї, здійснюють подачу вогнегасної речовини до осередку горіння, змінюють кут розпилу вогнегасної речовини циклічно в горизонтальній площині, амплітуду кута розпилу вогнегасної речовини адаптують до площі вогнища загоряння, який відрізняється тим, що вимірюють та контролюють температуру від осередку горіння в середовищі, що безпосередньо оточує мобільний робот, порівнюють величину цієї температури з температурою, яка визначає критичну експлуатаційну температуру мобільного робота, при наявності неузгодженості між ними переміщують мобільний робот у напрямку осередку горіння до усунення цієї температурної неузгодженості. 2 UA 120390 U Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюPospielov Borys Borysovych, Andronov Volodymyr Anatoliiovych, Rybka Yevhenii Oleksiiovych, Deineko Natalia Viktorivna
Автори російськоюПоспелов Борис Борисович, Андронов Владимир Анатолиевич, Рыбка Евгений Алексеевич, Дейнеко Наталья Викторовна
МПК / Мітки
МПК: A62C 37/00, A62C 3/00
Мітки: гасіння, пожежі, мобільним, спосіб, роботом
Код посилання
<a href="https://ua.patents.su/5-120390-sposib-gasinnya-pozhezhi-mobilnim-robotom.html" target="_blank" rel="follow" title="База патентів України">Спосіб гасіння пожежі мобільним роботом</a>
Спосіб гасіння пожежі мобільним роботом
Номер патенту: 119615
Опубліковано: 25.09.2017
Автори: Андронов Володимир Анатолійович, Поспєлов Борис Борисович, Дейнеко Наталя Вікторівна, Рибка Євгеній Олексійович
Мітки: мобільним, спосіб, пожежі, гасіння, роботом
Формула / Реферат:
Спосіб гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до неї, контролюють величину теплового потоку від осередку горіння, порівнюють з величиною, яка відповідає граничним тепловим характеристикам мобільного робота, при наявності неузгодженості між ними змінюють положення робота до усунення цієї неузгодженості, переміщують робот в...
Спосіб гасіння пожежі мобільним пожежним роботом
Номер патенту: 114600
Опубліковано: 10.03.2017
Автори: Кривцова Валентина Іванівна, Собина Віталій Олександрович, Абрамов Юрій Олексійович
МПК: A62C 3/00
Мітки: роботом, гасіння, мобільним, пожежним, пожежі, спосіб
Формула / Реферат:
Спосіб гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу вогнища загоряння та відстань до нього, переміщують пожежний робот в робочу позицію і здійснюють подачу вогнегасної речовини до вогнища загоряння, який відрізняється тим, що контролюють величину теплового потоку від вогнища загоряння, порівнюють цю величину із апріорі заданою, при наявності...
Спосіб гасіння пожежі та склад для його здійснення
Номер патенту: 60882
Опубліковано: 15.10.2003
Автори: Кірєєв Олександр Олександрович, Бабенко Олексій Володимирович, Борисов Петро Федорович, Росоха Володимир Омелянович, Абрамов Юрій Олексійович
МПК: A62C 2/00
Мітки: спосіб, гасіння, склад, здійснення, пожежі
Формула / Реферат:
1. Спосіб гасіння пожежі, який полягає у тому, що у осередок пожежі подають вогнегасну речовину, який відрізняється тим, що вогнегасну речовину формують шляхом змішування двох розчинів на поверхні горіння, один з яких є водним розчином силікату лужного металу, а другий є коагулятором та каталізатором гелеутворення, наприклад як водний розчин солей двовалентних та багатовалентних металів.2. Склад для гасіння пожежі, який відрізняється...
Спосіб гасіння пожежі в ізольованій ділянці тунелю (в закритому об`ємі) рециркуляцією продуктів горіння
Номер патенту: 23065
Опубліковано: 10.05.2007
Автори: Дмитровський Сергій Юрійович, Ковалишин Василь Васильович
МПК: A62C 39/00
Мітки: гасіння, ділянці, спосіб, тунелю, пожежі, закритому, горіння, об'ємі, ізольований, рециркуляцією, продуктів
Формула / Реферат:
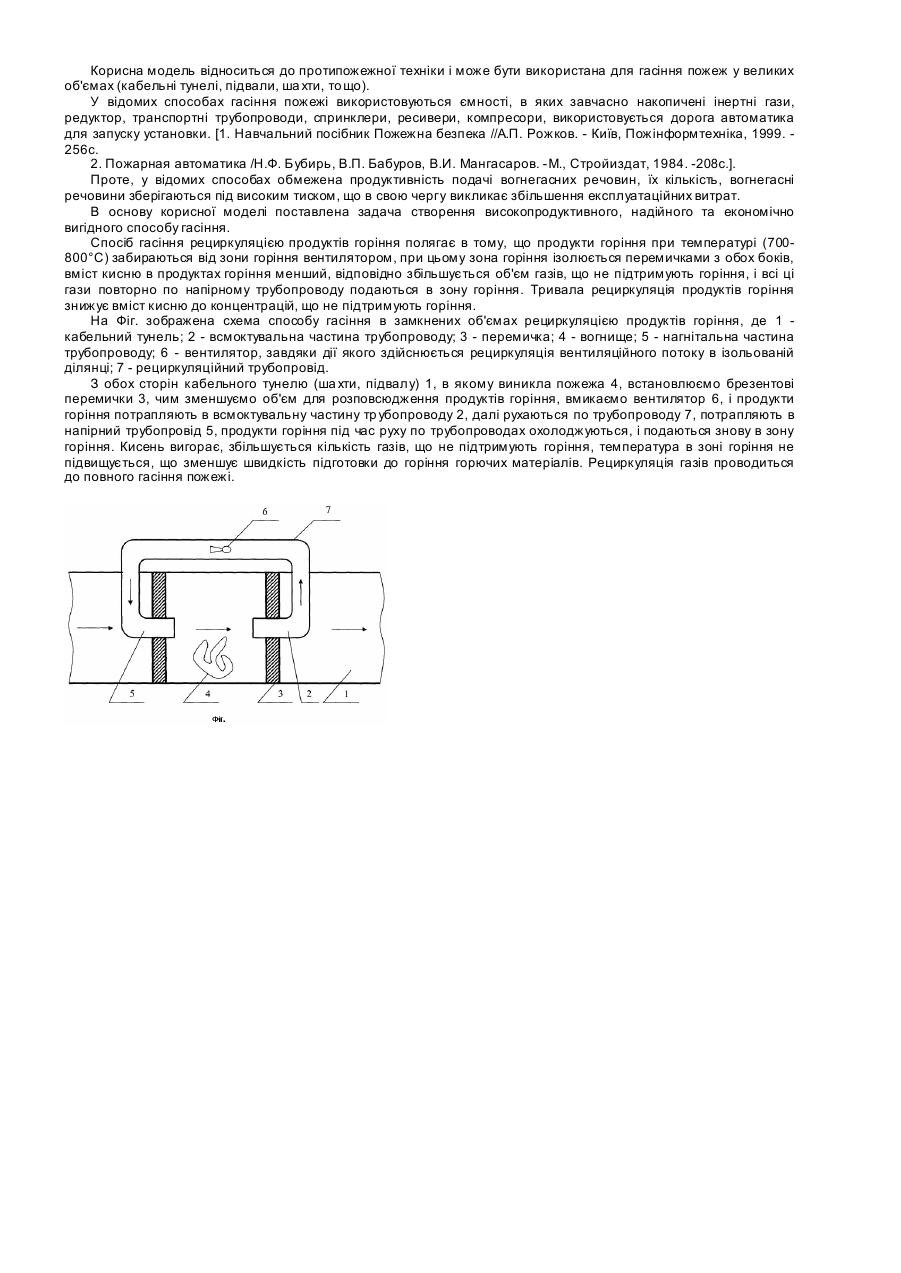
Спосіб гасіння пожежі в ізольованій ділянці тунелю (в закритому об'ємі) рециркуляцією продуктів горіння, який полягає в тому, що продукти горіння при високій температурі (700-800 °С) забираються з одного боку від ізольованої з обох боків зони горіння і подаються з іншого боку ізольованої ділянки, пройшовши по трубопроводу великої довжини в об'єм, в якому проходить горіння.
Пристрій для гасіння пожежі
Номер патенту: 1160
Опубліковано: 15.02.2002
Автори: Малахов Володимир Анатолійович, Борисюк Михайло Дем'янович, Бусяк Юрій Митрофанович, Магерамов Лютфалій Курбан-Алієвич, Бершов Олександр Вікторович, Каленков Володимир Геннадієвич, Роїк Юрій Григорович, Проценко Ігор Павлович, Большаков Анатолій Костянтинович
МПК: A62C 13/66, A62C 27/00
Мітки: пристрій, гасіння, пожежі
Формула / Реферат:
1. Пристрій для гасіння пожежі, що містить пневмокамеру і заповнений вогнегасною речовиною циліндричний корпус, які розділені між собою перегородкою, який відрізняється тим, що перегородка виконана жорсткою і встановлена в корпусі з можливістю осьового переміщення і корпус забезпечений мембраною, закріпленою на його зовнішньому торці.2. Пристрій по п. 1, який відрізняється тим, що перегородка виконана у вигляді стакана, дно якого...
Попередній патент: Барда мелясна як поживне середовище для культивування лікарських грибів
Наступний патент: Спосіб відновлення зношених поверхонь стрілочних переводів
Випадковий патент: Спосіб пневматичного дозування порошкоподібного матеріалу по фурмах агрегату