Вібраційний гіроскоп з компенсацією зміщення нуля
Номер патенту: 121394
Опубліковано: 11.12.2017
Автор: ПУБЛІЧНЕ АКЦІОНЕРНЕ ТОВАРИСТВО "НАУКОВО-ВИРОБНИЧЕ ОБ'ЄДНАННЯ "КИЇВСЬКИЙ ЗАВОД АВТОМАТИКИ"

Формула / Реферат
Вібраційний гіроскоп, що містить резонатор з електродами збудження та знімання сигналів, блок збудження первинних коливань, блок формування сигналу, пропорційного кутової швидкості, який відрізняється тим, що для компенсації зміщення нуля за рахунок вирівнювання різниці коефіцієнтів демпфування коливань і резонансних частот у нього додатково вводяться блок формування швидкості відхилення резонатора від рівноважного положення, вихід якого з'єднаний з входом блока налаштування амплітуди сигналу швидкості відхилення, вихід якого з'єднаний зі входом блока підсумування сигналів, блок налаштування амплітуди сигналу відхилення, вихід якого з'єднаний зі входом блока підсумування сигналів та блок підсумування сигналів, три входи якого з'єднані з виходами блоків налаштування амплітуд сигналів відхилення, швидкості відхилення і блока збудження первинних коливань, а вихід з електродом збудження, а коефіцієнти підсилювання блоків налаштування вибираються так, щоб мінімізувати середнє значення вихідного сигналу гіроскопа.
Текст
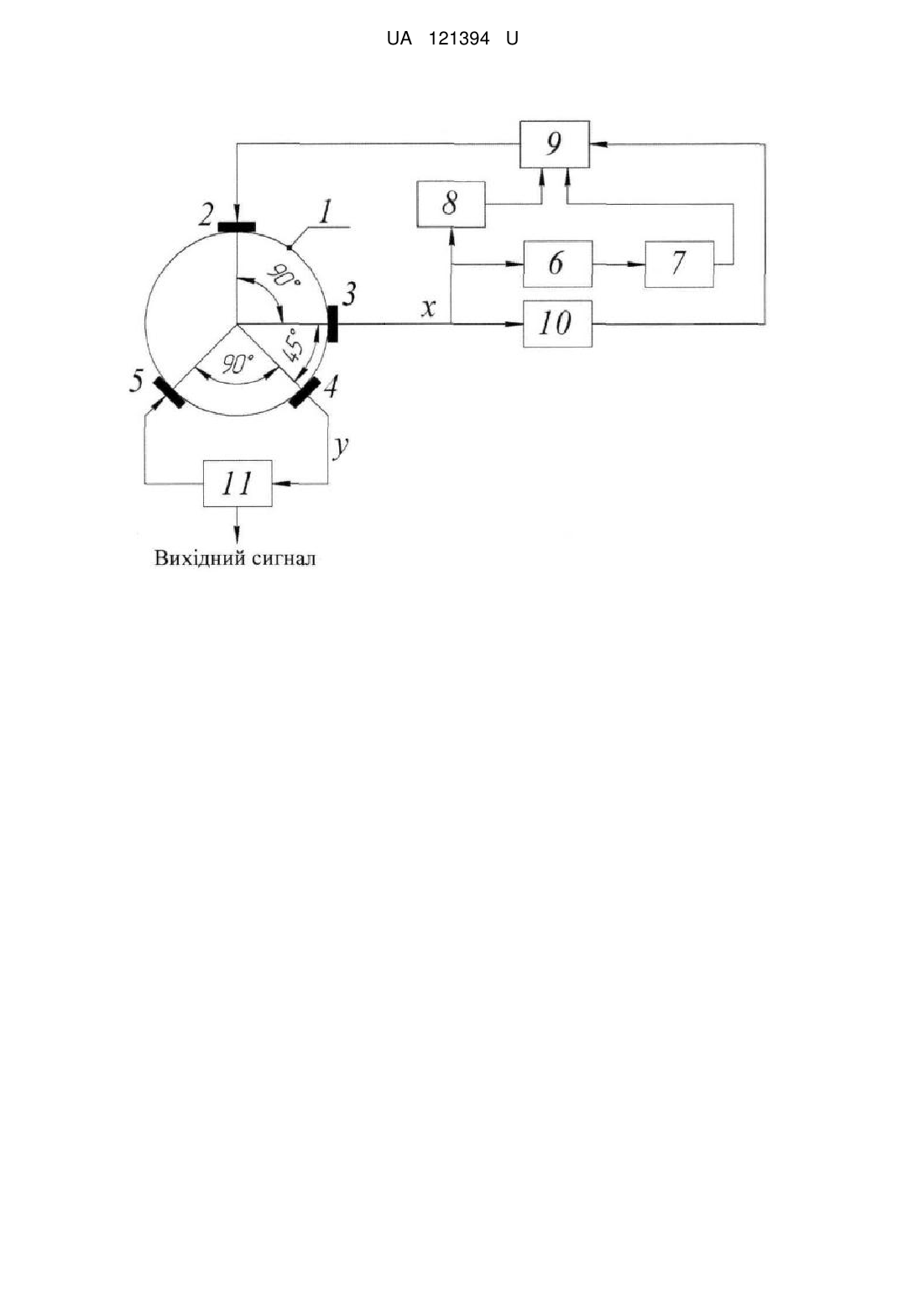
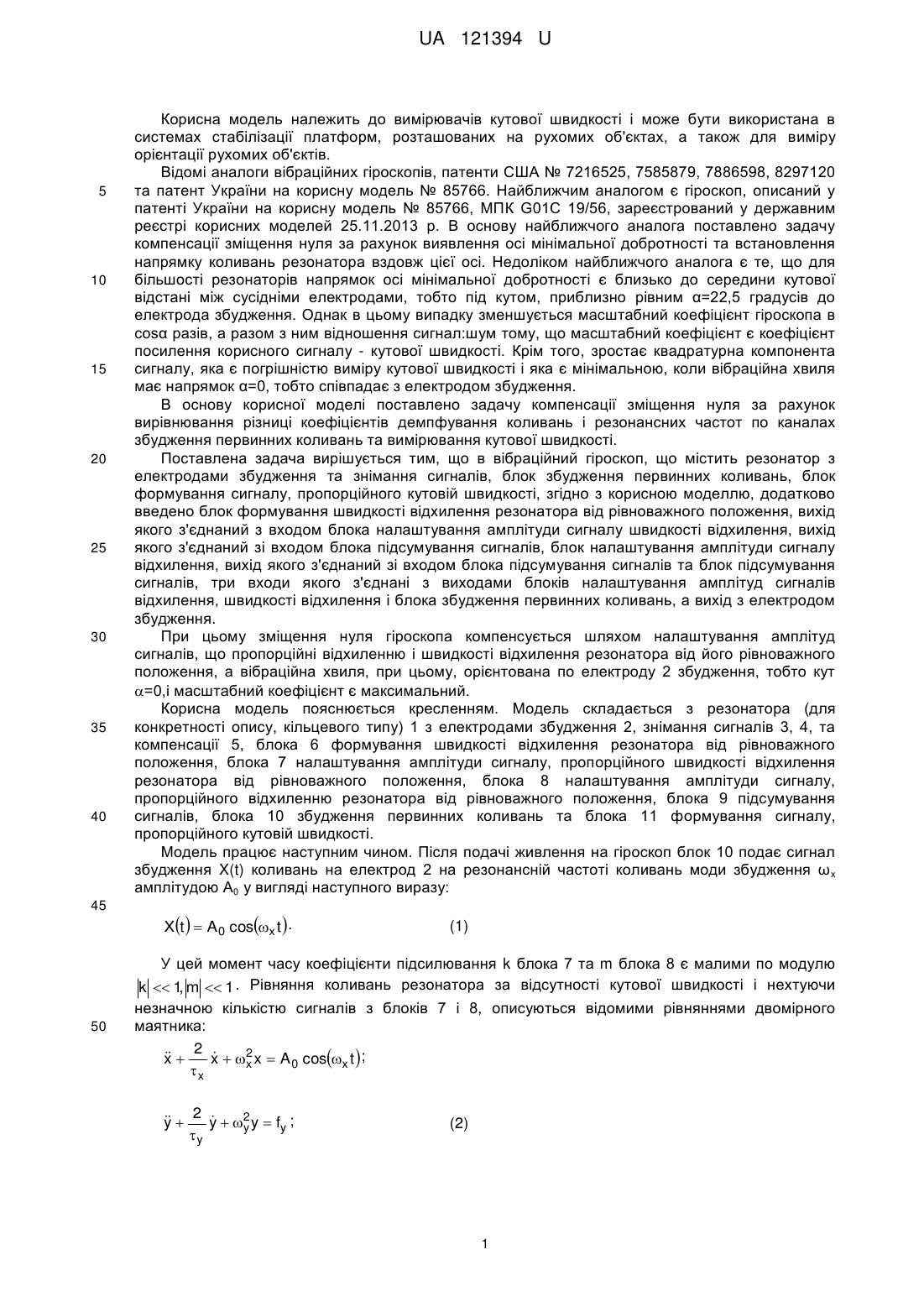
Реферат: UA 121394 U UA 121394 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до вимірювачів кутової швидкості і може бути використана в системах стабілізації платформ, розташованих на рухомих об'єктах, а також для виміру орієнтації рухомих об'єктів. Відомі аналоги вібраційних гіроскопів, патенти США № 7216525, 7585879, 7886598, 8297120 та патент України на корисну модель № 85766. Найближчим аналогом є гіроскоп, описаний у патенті України на корисну модель № 85766, МПК G01С 19/56, зареєстрований у державним реєстрі корисних моделей 25.11.2013 р. В основу найближчого аналога поставлено задачу компенсації зміщення нуля за рахунок виявлення осі мінімальної добротності та встановлення напрямку коливань резонатора вздовж цієї осі. Недоліком найближчого аналога є те, що для більшості резонаторів напрямок осі мінімальної добротності є близько до середини кутової відстані між сусідніми електродами, тобто під кутом, приблизно рівним α=22,5 градусів до електрода збудження. Однак в цьому випадку зменшується масштабний коефіцієнт гіроскопа в cosα разів, а разом з ним відношення сигнал:шум тому, що масштабний коефіцієнт є коефіцієнт посилення корисного сигналу - кутової швидкості. Крім того, зростає квадратурна компонента сигналу, яка є погрішністю виміру кутової швидкості і яка є мінімальною, коли вібраційна хвиля має напрямок α=0, тобто співпадає з електродом збудження. В основу корисної моделі поставлено задачу компенсації зміщення нуля за рахунок вирівнювання різниці коефіцієнтів демпфування коливань і резонансних частот по каналах збудження первинних коливань та вимірювання кутової швидкості. Поставлена задача вирішується тим, що в вібраційний гіроскоп, що містить резонатор з електродами збудження та знімання сигналів, блок збудження первинних коливань, блок формування сигналу, пропорційного кутовій швидкості, згідно з корисною моделлю, додатково введено блок формування швидкості відхилення резонатора від рівноважного положення, вихід якого з'єднаний з входом блока налаштування амплітуди сигналу швидкості відхилення, вихід якого з'єднаний зі входом блока підсумування сигналів, блок налаштування амплітуди сигналу відхилення, вихід якого з'єднаний зі входом блока підсумування сигналів та блок підсумування сигналів, три входи якого з'єднані з виходами блоків налаштування амплітуд сигналів відхилення, швидкості відхилення і блока збудження первинних коливань, а вихід з електродом збудження. При цьому зміщення нуля гіроскопа компенсується шляхом налаштування амплітуд сигналів, що пропорційні відхиленню і швидкості відхилення резонатора від його рівноважного положення, а вібраційна хвиля, при цьому, орієнтована по електроду 2 збудження, тобто кут =0,і масштабний коефіцієнт є максимальний. Корисна модель пояснюється кресленням. Модель складається з резонатора (для конкретності опису, кільцевого типу) 1 з електродами збудження 2, знімання сигналів 3, 4, та компенсації 5, блока 6 формування швидкості відхилення резонатора від рівноважного положення, блока 7 налаштування амплітуди сигналу, пропорційного швидкості відхилення резонатора від рівноважного положення, блока 8 налаштування амплітуди сигналу, пропорційного відхиленню резонатора від рівноважного положення, блока 9 підсумування сигналів, блока 10 збудження первинних коливань та блока 11 формування сигналу, пропорційного кутовій швидкості. Модель працює наступним чином. Після подачі живлення на гіроскоп блок 10 подає сигнал збудження X(t) коливань на електрод 2 на резонансній частоті коливань моди збудження ω х амплітудою А0 у вигляді наступного виразу: Xt A0 cosx t . (1) У цей момент часу коефіцієнти підсилювання k блока 7 та m блока 8 є малими по модулю k 1 m 1 . Рівняння коливань резонатора за відсутності кутової швидкості і нехтуючи , незначною кількістю сигналів з блоків 7 і 8, описуються відомими рівняннями двомірного маятника: 2 x 2 x A 0 cosx t ; x x x 2 y 2 y fy ; y y y (2) 1 UA 121394 U де x - відхилення резонатора від рівноважного положення у процесі вібрацій, що є відкликом резонатора на сигнал збудження X t , тобто вихідний сигнал електрода знімання 3; y - відхилення резонатора від рівноважного положення у процесі вібрацій, що є відкликом 5 10 15 20 25 резонатора на збудження X t по каналу вимірювання кутової швидкості, тобто вихідний сигнал електрода знімання 4; x , y - резонансні частоти по каналах збудження і вимірювання, відповідно; x , y - постійні часу демпфування коливань по каналах збудження і вимірювання, відповідно. Для ідеального резонатора, коли x y і x y , сила fy 0 і як наслідок y 0 , тобто коливань по вимірювальному каналу відсутні, тобто зміщення нуля відсутнє. Однак похибки виготовлення та неоднорідність матеріалу резонатора приводить до того, що резонансні частоти та постійні часу демпфування по каналах збудження x і вимірювання y різні. Як результат виникає сила fy 0 , що збуджує коливання по вимірювальному каналу, тобто є сигнал з електроду 4 у відсутності кутової швидкості, що приводить до зміщення нуля гіроскопа. Для компенсації зміщення нуля гіроскопа слід вирівняти коефіцієнти демпфування і резонансні частоти по цих двох каналах. Для цього слід подати додаткові сигнали управління, пропорційні відхиленню x резонатора від рівноважного положення, з коефіцієнтом підсилювання k, і швидкості відхилення x , з коефіцієнтом підсилювання m, та налаштувати коефіцієнти підсилювання k і m додаткових сигналів для вирівнювання цих двох параметрів резонатора. Ці налаштування виконуються за допомогою блоків 7 і 8, можливо вручну або автоматично. Критерієм налаштування є мінімум середнього значення вихідного сигналу гіроскопа. Слід відмітити, що через присутність шуму у реальних гіроскопах точно налаштувати коефіцієнти k і m, щоб отримати fy 0 неможливо, тому треба мінімізувати fy , тобто зміщення нуля. Для цього на виході блока 6 формується сигнал х, а на виході блока 7 формується додатковий сигнал mx . На виході блока 8 формується другий додатковій сигнал kx. В блоці підсумовування 9 додаткові сигналі складаються з сигналом збудження A0 cosx t і сума трьох сигналів подається на електрод 2 збудження. У разі присутності додаткових сигналів з блоків 7 і 8, рівняння (2) мають наступній вигляд: 2 x 2 x A0 cosx t kx mx ; x x x 30 (3) 2 y 2 y fy y y y або ( 2 m)x (2 k)x A 0 cosx t ; (4) x x x 35 2 y 2 y fy . y y y Коефіцієнти підсилювання k і m налаштовуються так, щоб виконувалися співвідношення: m 2 2 ; k 2 2 . x y x y (5) При цьому коефіцієнти демпфування і резонансні частоти для каналів збудження і виміру рівні між собою, а сила fy прагне до нуля, тобто мінімізується, а отже і зміщення нуля гіроскопа 40 прагне до нуля. Таким чином, поставлена задача вирішена: скомпенсована різниця резонансних частот та різниця коефіцієнтів демпфування коливань резонатору, тобто скомпенсовані причини виникнення зміщення нуля гіроскопа, а значить і зміщення нуля. 45 2 UA 121394 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Вібраційний гіроскоп, що містить резонатор з електродами збудження та знімання сигналів, блок збудження первинних коливань, блок формування сигналу, пропорційного кутової швидкості, який відрізняється тим, що для компенсації зміщення нуля за рахунок вирівнювання різниці коефіцієнтів демпфування коливань і резонансних частот у нього додатково вводяться блок формування швидкості відхилення резонатора від рівноважного положення, вихід якого з'єднаний з входом блока налаштування амплітуди сигналу швидкості відхилення, вихід якого з'єднаний зі входом блока підсумування сигналів, блок налаштування амплітуди сигналу відхилення, вихід якого з'єднаний зі входом блока підсумування сигналів та блок підсумування сигналів, три входи якого з'єднані з виходами блоків налаштування амплітуд сигналів відхилення, швидкості відхилення і блока збудження первинних коливань, а вихід з електродом збудження, а коефіцієнти підсилювання блоків налаштування вибираються так, щоб мінімізувати середнє значення вихідного сигналу гіроскопа. Комп’ютерна верстка А. Крижанівський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 19/56
Мітки: гіроскоп, зміщення, компенсацією, вібраційний, нуля
Код посилання
<a href="https://ua.patents.su/5-121394-vibracijjnijj-giroskop-z-kompensaciehyu-zmishhennya-nulya.html" target="_blank" rel="follow" title="База патентів України">Вібраційний гіроскоп з компенсацією зміщення нуля</a>
Балочний вібраційний гіроскоп з компенсацією зміщення нуля
Номер патенту: 85766
Опубліковано: 25.11.2013
Автори: Чіковані Валерій Валеріанович, Сущенко Ольга Андріївна
МПК: G01C 19/56
Мітки: гіроскоп, нуля, компенсацією, вібраційний, зміщення, балочний
Формула / Реферат:
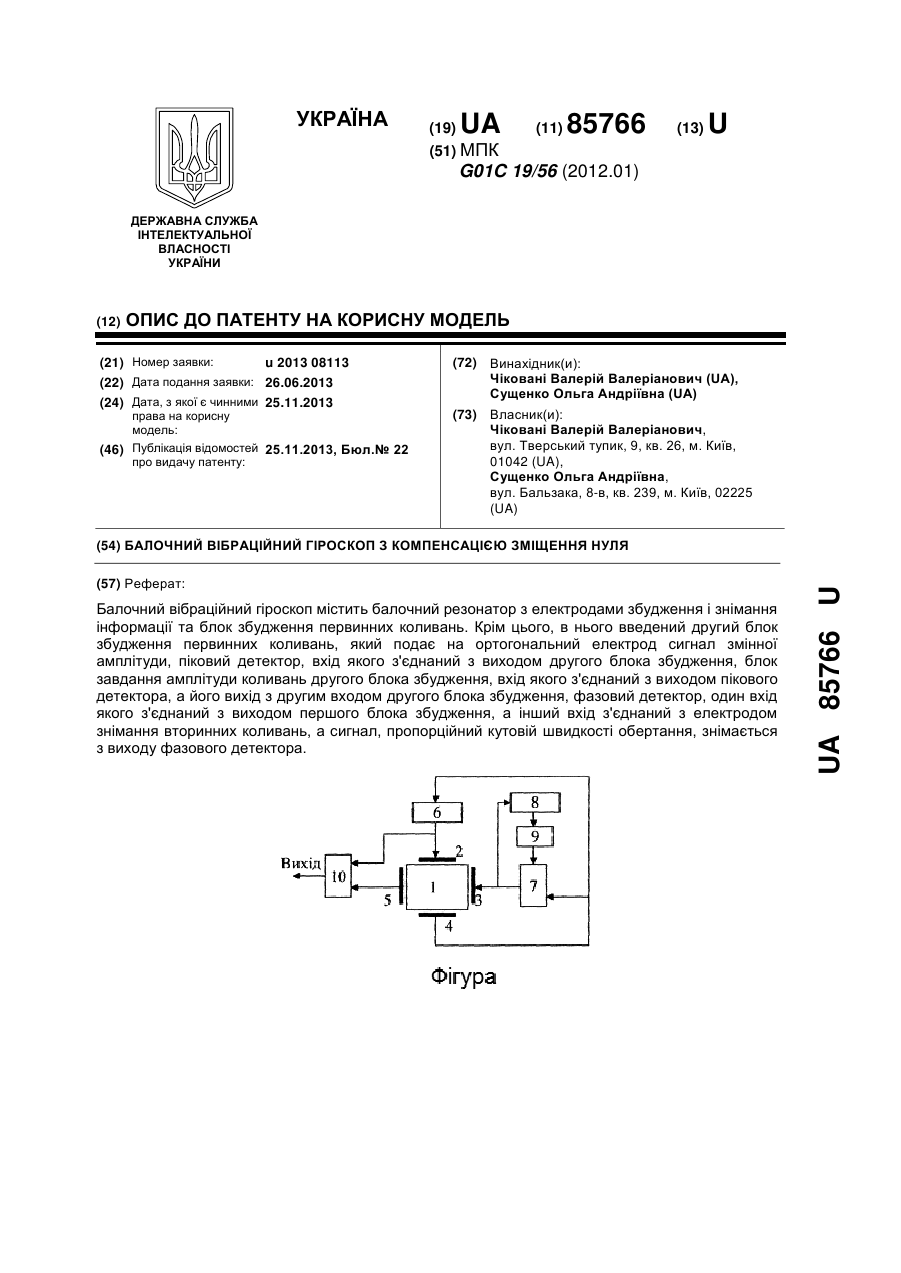
Балочний вібраційний гіроскоп, що містить балочний резонатор з електродами збудження і знімання інформації та блок збудження первинних коливань, який відрізняється тим, що в нього введений другий блок збудження первинних коливань, який подає на ортогональний електрод сигнал змінної амплітуди, піковий детектор, вхід якого з'єднаний з виходом другого блока збудження, блок завдання амплітуди коливань другого блока збудження, вхід якого...
Балочний вібраційний гіроскоп для систем стабілізації
Номер патенту: 85316
Опубліковано: 11.11.2013
Автори: Чіковані Валерій Валеріанович, Сущенко Ольга Андріївна
МПК: G01C 19/00
Мітки: стабілізації, систем, балочний, вібраційний, гіроскоп
Формула / Реферат:
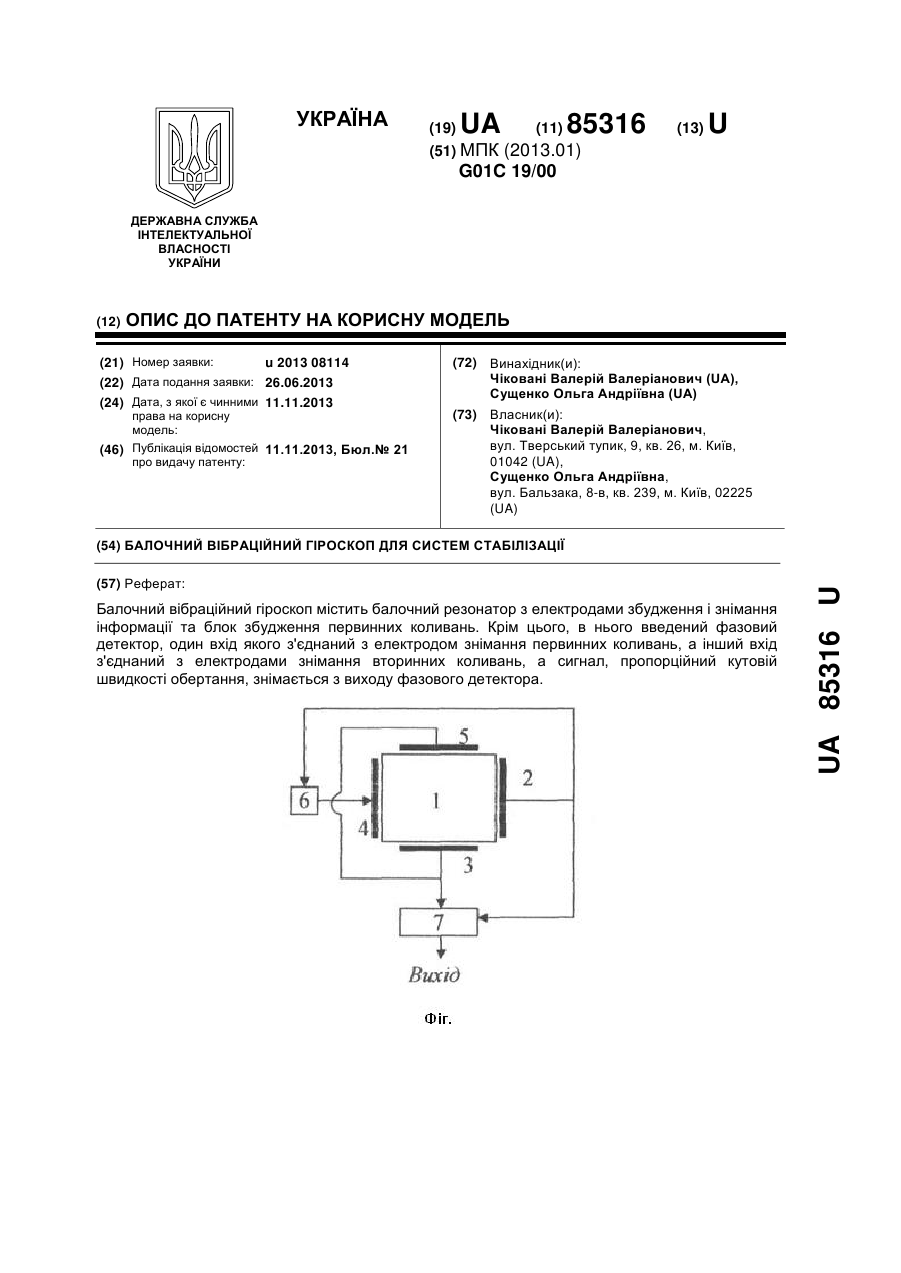
Балочний вібраційний гіроскоп, що містить балочний резонатор з електродами збудження і знімання інформації та блок збудження первинних коливань, який відрізняється тим, що в нього введений фазовий детектор, один вхід якого з'єднаний з електродом знімання первинних коливань, а інший вхід з'єднаний з електродами знімання вторинних коливань, а сигнал, пропорційний кутовій швидкості обертання, знімається з виходу фазового детектора.
Цифровий коріолісівський вібраційний гіроскоп
Номер патенту: 101747
Опубліковано: 25.04.2013
Автори: Ніколаєнко Алла Вікторівна, Маляров Сергій Прокопович, Цирук Віктор Григорович
МПК: G01C 19/56
Мітки: коріолісівський, цифровий, гіроскоп, вібраційний
Формула / Реферат:
Цифровий коріолісівський вібраційний гіроскоп, що містить резонатор з електродами знімання та збудження, блок автопідстроювання частоти, блок стабілізації амплітуди коливань, блоки демодуляції і модуляції, а також блоки компенсації квадратурної та коріолісівської мод коливань і виміру кутової швидкості, який відрізняється тим, що в нього додатково вводяться смугові фільтри, електрично зв'язані з частотоміром, автогенератором та...
Вібраційний гіроскоп, чутливий до коріолісового прискорення
Номер патенту: 22153
Опубліковано: 10.04.2007
Автори: Чіковані Валерій Валеріанович, Коваленко Володимир Анатолійович, Яценко Юрій Олексійович
МПК: G01C 19/56
Мітки: коріолісового, чутливий, вібраційний, гіроскоп, прискорення
Формула / Реферат:
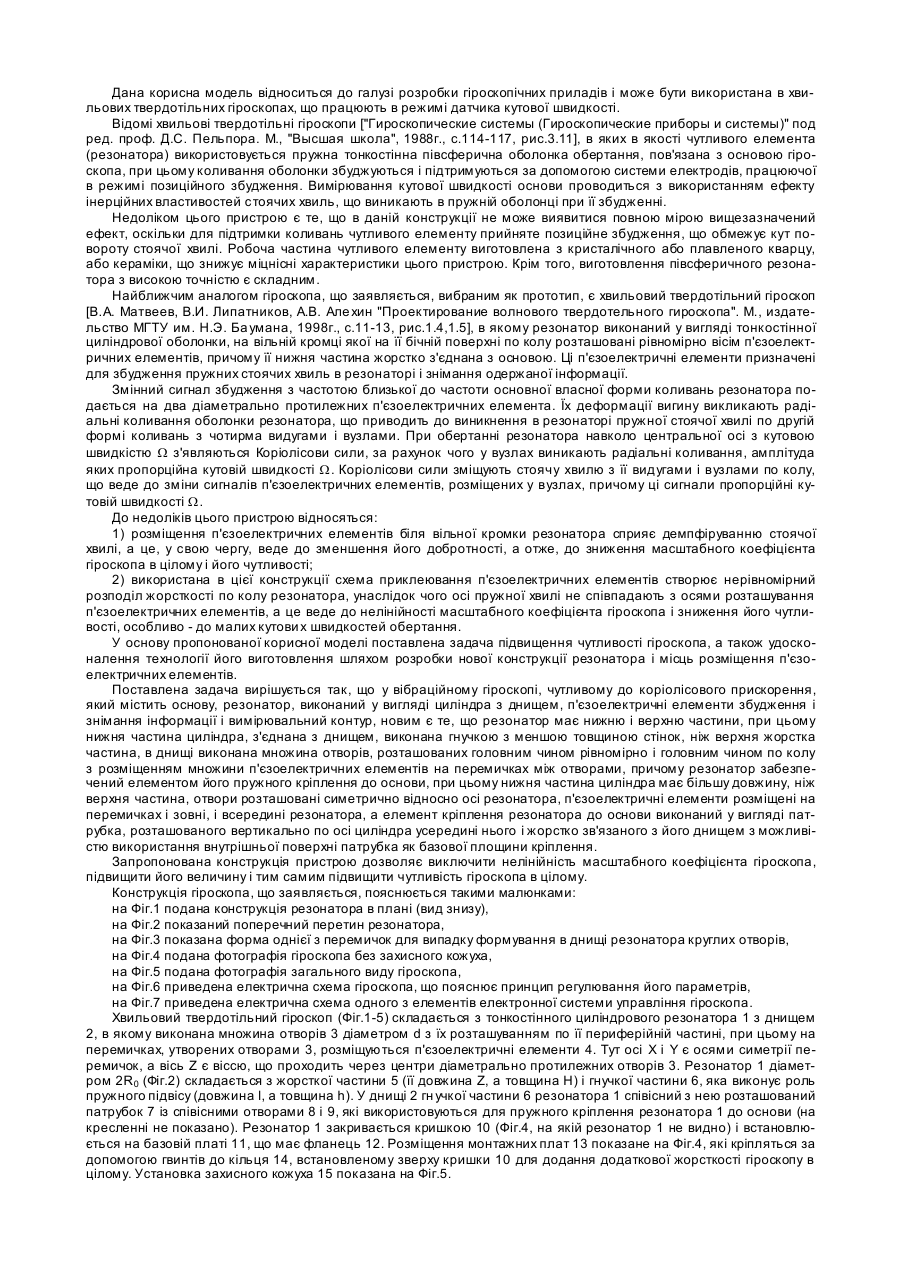
1. Вібраційний гіроскоп, чутливий до Коріолісового прискорення, який містить основу, резонатор, виконаний у вигляді циліндра з днищем, п'єзоелектричні елементи збудження і знімання інформації та вимірювальний контур, який відрізняється тим, що резонатор має нижню і верхню частини, при цьому нижня частина циліндра, з'єднана з днищем, виконана гнучкою з меншою товщиною стінок, ніж верхня жорстка частина, в днищі виконана множина отворів,...
Півсферичний резонаторний гіроскоп з складовим резонатором

Номер патенту: 24460
Опубліковано: 25.06.2007
Автори: Яценко Юрій Олексійович, Щербань Володимир Іванович, Коваленко Володимир Анатолійович, Чіковані Валерій Валеріанович
МПК: G01C 19/00
Мітки: резонатором, складовим, резонаторний, півсферичний, гіроскоп
Формула / Реферат:
1. Півсферичний резонаторний гіроскоп з складовим резонатором, що містить півсферичний резонатор, кільцевий електрод збудження і множину ємкісних електродів для зняття інформації, розташованих у вузлах і пучностях коливань півсферичного резонатора, який відрізняється тим, що в ньому півсферичний резонатор виконаний без ніжки і оснащений отвором в його полюсі, кільцевий електрод збудження виконаний у вигляді п'єзоелектричного диска з отвором...
Попередній патент: Склад для приготування сухої швидкорозчинної форми лікарського та/або біологічно активного засобу
Наступний патент: Спосіб розробки крутоспадних потужних рудних покладів
Випадковий патент: Модуль для електричного нагрівання рідинних середовищ