Балочний вібраційний гіроскоп з компенсацією зміщення нуля
Номер патенту: 85766
Опубліковано: 25.11.2013
Автори: Сущенко Ольга Андріївна, Чіковані Валерій Валеріанович

Формула / Реферат
Балочний вібраційний гіроскоп, що містить балочний резонатор з електродами збудження і знімання інформації та блок збудження первинних коливань, який відрізняється тим, що в нього введений другий блок збудження первинних коливань, який подає на ортогональний електрод сигнал змінної амплітуди, піковий детектор, вхід якого з'єднаний з виходом другого блока збудження, блок завдання амплітуди коливань другого блока збудження, вхід якого з'єднаний з виходом пікового детектора, а його вихід з другим входом другого блока збудження, фазовий детектор, один вхід якого з'єднаний з виходом першого блока збудження, а інший вхід з'єднаний з електродом знімання вторинних коливань, а сигнал, пропорційний кутовій швидкості обертання, знімається з виходу фазового детектора.
Текст
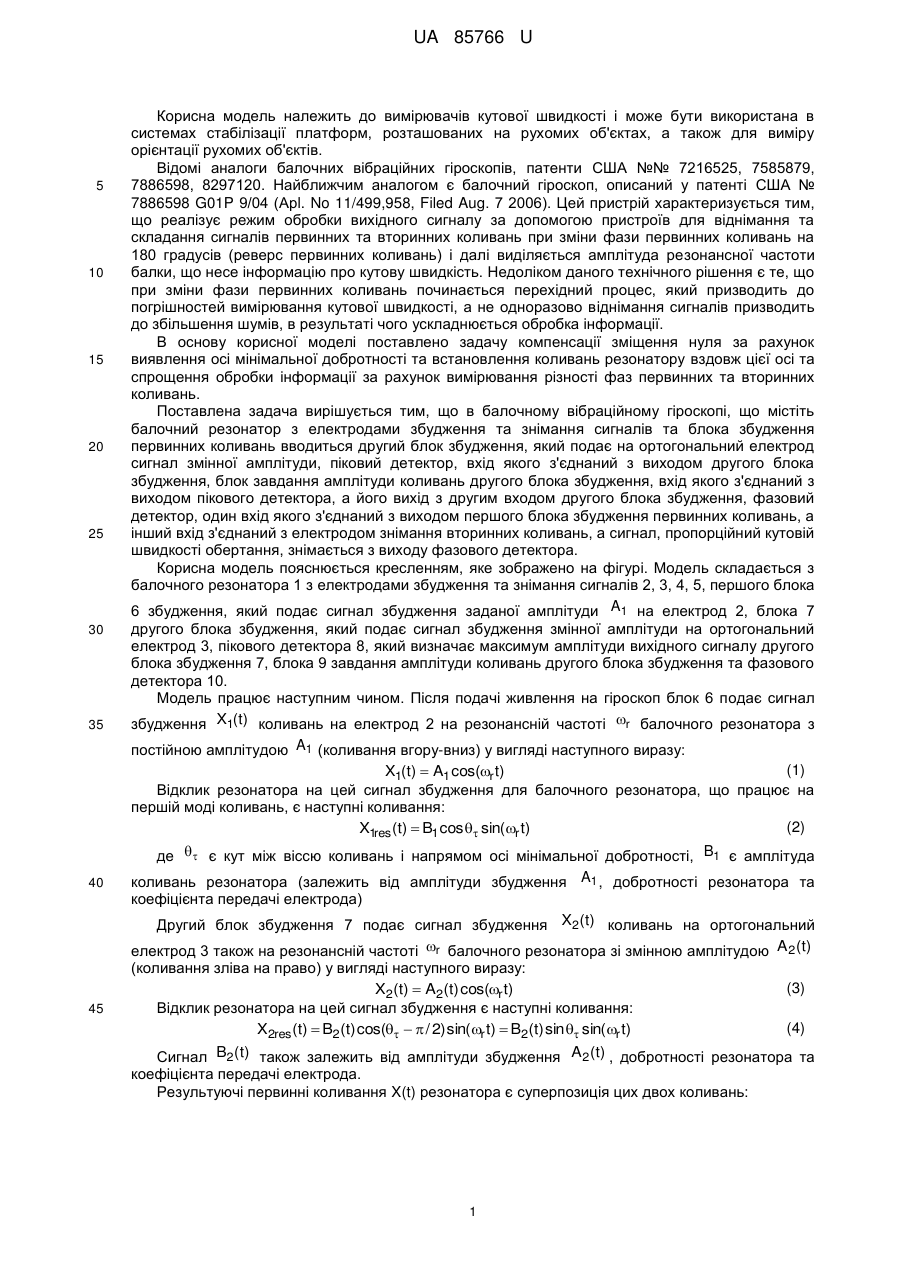
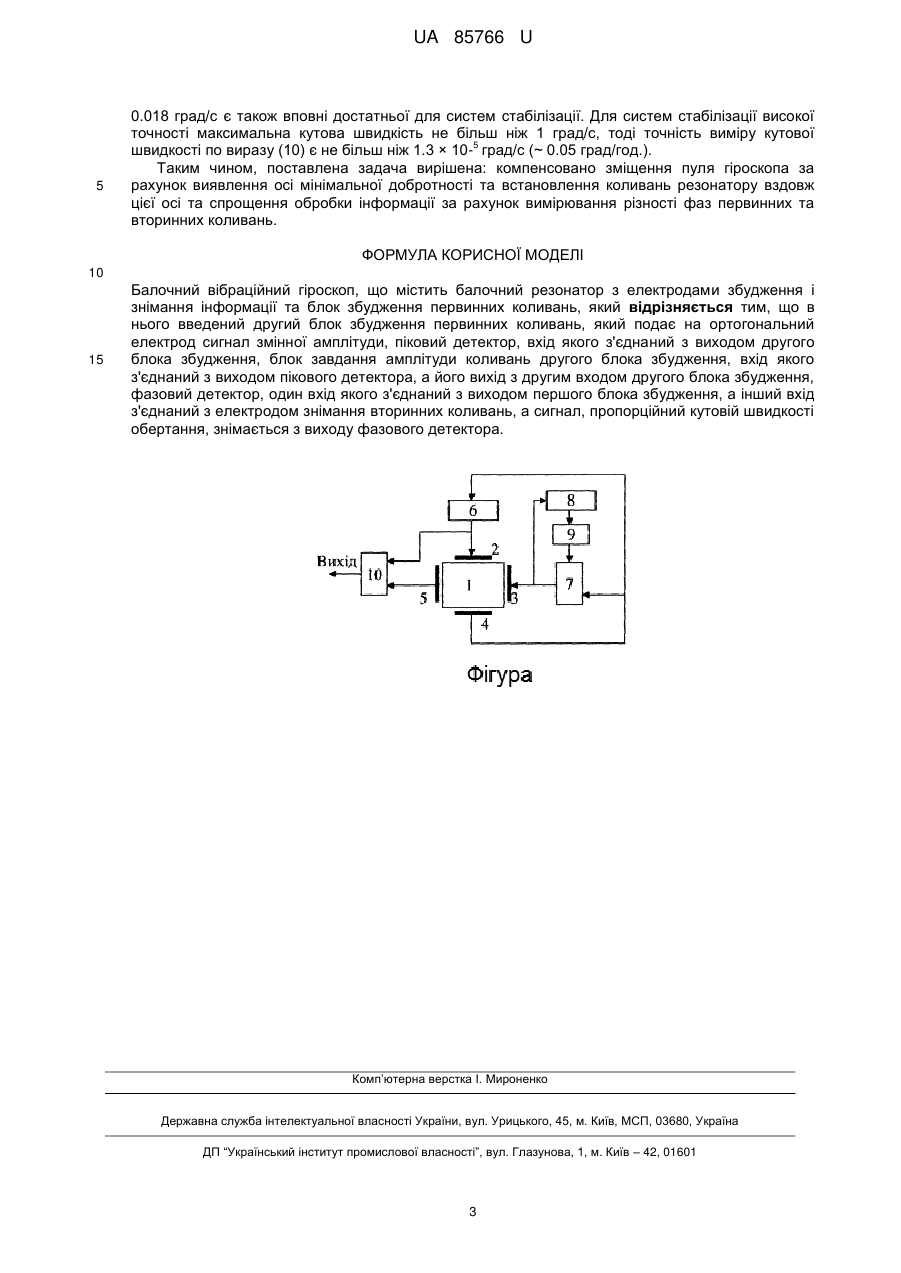
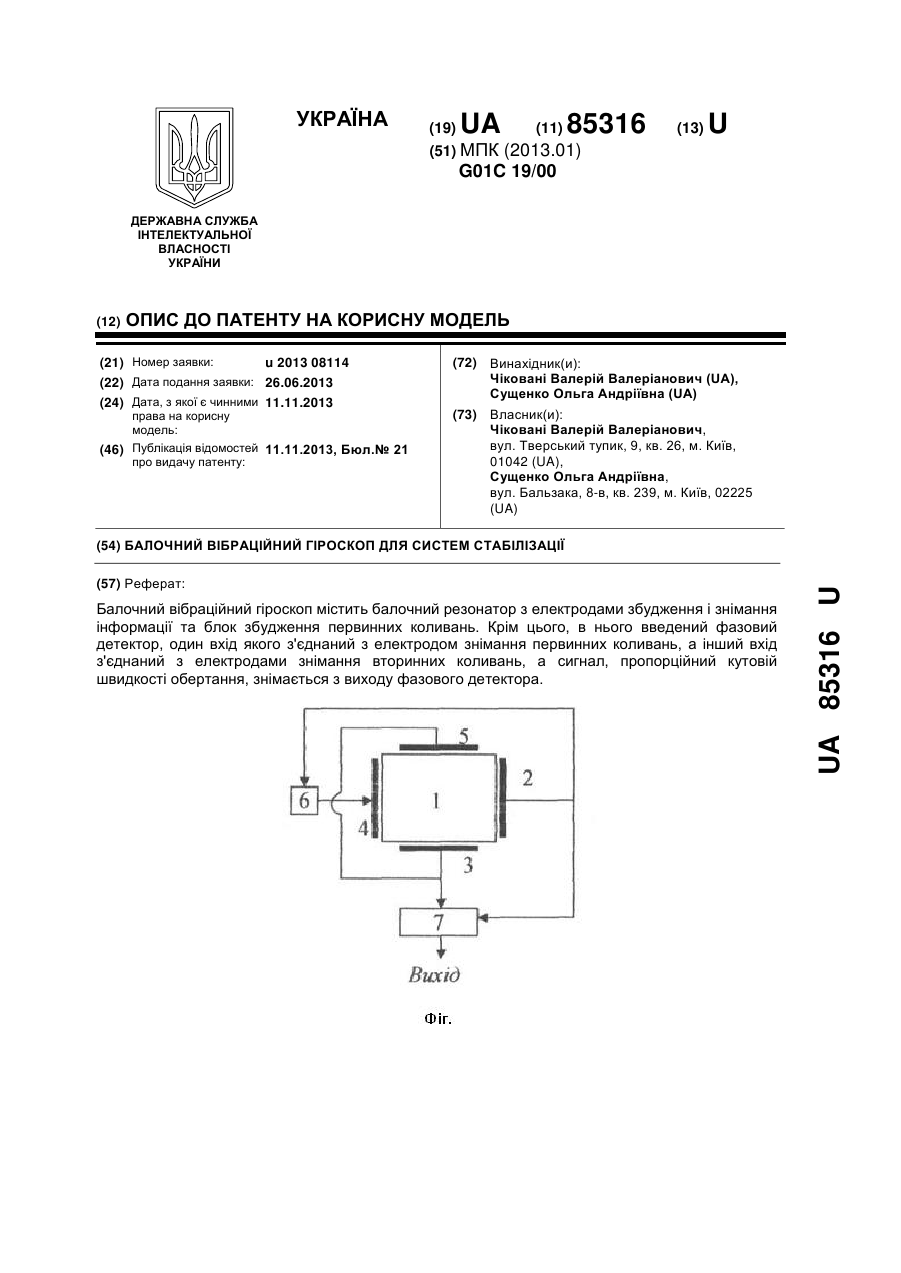
Реферат: Балочний вібраційний гіроскоп містить балочний резонатор з електродами збудження і знімання інформації та блок збудження первинних коливань. Крім цього, в нього введений другий блок збудження первинних коливань, який подає на ортогональний електрод сигнал змінної амплітуди, піковий детектор, вхід якого з'єднаний з виходом другого блока збудження, блок завдання амплітуди коливань другого блока збудження, вхід якого з'єднаний з виходом пікового детектора, а його вихід з другим входом другого блока збудження, фазовий детектор, один вхід якого з'єднаний з виходом першого блока збудження, а інший вхід з'єднаний з електродом знімання вторинних коливань, а сигнал, пропорційний кутовій швидкості обертання, знімається з виходу фазового детектора. UA 85766 U (54) БАЛОЧНИЙ ВІБРАЦІЙНИЙ ГІРОСКОП З КОМПЕНСАЦІЄЮ ЗМІЩЕННЯ НУЛЯ UA 85766 U UA 85766 U 5 10 15 20 25 30 35 Корисна модель належить до вимірювачів кутової швидкості і може бути використана в системах стабілізації платформ, розташованих на рухомих об'єктах, а також для виміру орієнтації рухомих об'єктів. Відомі аналоги балочних вібраційних гіроскопів, патенти США №№ 7216525, 7585879, 7886598, 8297120. Найближчим аналогом є балочний гіроскоп, описаний у патенті США № 7886598 G01P 9/04 (Арl. No 11/499,958, Filed Aug. 7 2006). Цей пристрій характеризується тим, що реалізує режим обробки вихідного сигналу за допомогою пристроїв для віднімання та складання сигналів первинних та вторинних коливань при зміни фази первинних коливань на 180 градусів (реверс первинних коливань) і далі виділяється амплітуда резонансної частоти балки, що несе інформацію про кутову швидкість. Недоліком даного технічного рішення є те, що при зміни фази первинних коливань починається перехідний процес, який призводить до погрішностей вимірювання кутової швидкості, а не одноразово віднімання сигналів призводить до збільшення шумів, в результаті чого ускладнюється обробка інформації. В основу корисної моделі поставлено задачу компенсації зміщення нуля за рахунок виявлення осі мінімальної добротності та встановлення коливань резонатору вздовж цієї осі та спрощення обробки інформації за рахунок вимірювання різності фаз первинних та вторинних коливань. Поставлена задача вирішується тим, що в балочному вібраційному гіроскопі, що містіть балочний резонатор з електродами збудження та знімання сигналів та блока збудження первинних коливань вводиться другий блок збудження, який подає на ортогональний електрод сигнал змінної амплітуди, піковий детектор, вхід якого з'єднаний з виходом другого блока збудження, блок завдання амплітуди коливань другого блока збудження, вхід якого з'єднаний з виходом пікового детектора, а його вихід з другим входом другого блока збудження, фазовий детектор, один вхід якого з'єднаний з виходом першого блока збудження первинних коливань, а інший вхід з'єднаний з електродом знімання вторинних коливань, а сигнал, пропорційний кутовій швидкості обертання, знімається з виходу фазового детектора. Корисна модель пояснюється кресленням, яке зображено на фігурі. Модель складається з балочного резонатора 1 з електродами збудження та знімання сигналів 2, 3, 4, 5, першого блока 6 збудження, який подає сигнал збудження заданої амплітуди A1 на електрод 2, блока 7 другого блока збудження, який подає сигнал збудження змінної амплітуди на ортогональний електрод 3, пікового детектора 8, який визначає максимум амплітуди вихідного сигналу другого блока збудження 7, блока 9 завдання амплітуди коливань другого блока збудження та фазового детектора 10. Модель працює наступним чином. Після подачі живлення на гіроскоп блок 6 подає сигнал збудження X1(t) коливань на електрод 2 на резонансній частоті r балочного резонатора з постійною амплітудою A1 (коливання вгору-вниз) у вигляді наступного виразу: (1) X1(t) A1 cos(r t) Відклик резонатора на цей сигнал збудження для балочного резонатора, що працює на першій моді коливань, є наступні коливання: (2) X1res (t) B1 cos sin( r t) де є кут між віссю коливань і напрямом осі мінімальної добротності, B1 є амплітуда 40 45 коливань резонатора (залежить від амплітуди збудження A1 , добротності резонатора та коефіцієнта передачі електрода) Другий блок збудження 7 подає сигнал збудження X2(t) коливань на ортогональний електрод 3 також на резонансній частоті r балочного резонатора зі змінною амплітудою A2 (t) (коливання зліва на право) у вигляді наступного виразу: (3) X2(t) A2(t) cos(r t) Відклик резонатора на цей сигнал збудження є наступні коливання: (4) X2res (t) B2(t) cos( / 2) sin( r t) B2(t) sin sin(r t) Сигнал B2 (t) також залежить від амплітуди збудження A2 (t) , добротності резонатора та коефіцієнта передачі електрода. Результуючі первинні коливання X(t) резонатора є суперпозиція цих двох коливань: 1 UA 85766 U X(t) X1res (t) X 2res (t) B1 cos sin( r t) B2 (t) sin sin( r t) (5) B2 ; B1 де є кут повороту вібраційної хвилі відносно напрямку збудження електрода 2, що визначає напрямок коливань резонатора. Таким чином, зміна амплітуди A2(t) тягне за собою зміну амплітуди B2(t) і як бачимо з виразу (5) вібраційна хвиля повертається. Коли вона співпаде з віссю мінімальної добротності сигнал збудження досягне максимуму В2тах, щоб зберегти результуючу амплітуду коливань резонатора стабільною. Значення амплітуди, при якій вісь коливань співпадає з віссю мінімальної добротності фіксує піковий детектор 8 і передає це значення блока 9 завдання амплітуди сигналу другого блока збудження 7. Після фіксації блоком 8 максимальної амплітуді збудження В2mах, блок 7 подає на електрод 3 сигнал фіксованої амплітуди. Так як зміщення нуля у вібраційних гіроскопах визначається наступним співвідношенням: 2 B1 B2 cos( ) sin( r t); arctg 2 5 10 Зміщення нуля r 1 1 Q Q sin[n( )] 4k 1 2 (6) де Q1 , Q2 добротності по осях максимальної і мінімальної добротності, n є номер моди коливань, k є константа, залежна від геометрії резонатора. Для балочного резонатора k=1, n=1, будемо мати: r 4 Тобто при збігу напрямку коливань ), зміщення нуля дорівнює нулю. Зміщення нуля 15 1 1 (7) Q Q sin( ) 2 1 з напрямком осі мінімальної добротності (коли При появі кутової швидкості обертання навколо осі паралельної повздовжньої осі балки виникає сила Коріоліса, яка викликає вторинні коливання Y(t) вдовж осі, яка перпендикулярна 20 осі первинних коливань. В даному випадку під кутом / 2 до напрямку збудження електрода 2. Сигнал вторинних коливань, що знімається з електрода 5 несе інформацію про кутову швидкість обертання балки і може бути представлена наступним виразом: Y( t) K0 cos( ) sin r t A q cos( ) cos r t (8) 2 2 (K)2 A q sin( / 2) cos(r t ) (K)2 A q cos( ) cos(r t ); A де q є амплітуда квадратурного сигналу, K є масштабний коефіцієнт гіроскопа. Далі сигнал (8) подається на один з входів блока 10 фазового детектора, а на другий його вхід подається сигнал (1) з виходу першого блока збудження. Так як і cos( ) 1, то на виході блока 10 фазового детектора маємо сигнал різниці фаз : K K , (9) Aq Aq для 1 який є пропорційний кутовій швидкості , для малих . A Слід відзначити, що значення q завжди відмінно від нуля, бо характеризує погрішності виготовлення резонатора (наприклад, різна товщина балки), яка не може бути ідеальною. Масштабний коефіцієнт таких гіроскопів зазвичай є на рівні 0,01-0,02 В/(град/с), значення Aq K / Aq 0.5 приблизно на рівні 0,04-0,05 В, тобто у виразу (9) , отже рівність (9) виконується . Наприклад, для 2 рад/с (~ 11 град/с) погрішність вимірювання кутової для малих швидкості буде рівна не лінійності функції arctg(x) для малих x , тобто: arctg 25 30 3 1 K 1 (0.1)3 0.0003рад / с 0,018град / с Aq 3 3 35 (10) Так як в системі стабілізації діапазон кутових швидкостей є малий тому, що як тільки з'являється кутова швидкість система стабілізації компенсує її повертаючи платформу в початкове положення, то умова максимальної кутової швидкості не більш 11 град/с виконується для більшості систем стабілізації, а максимальна погрішність виміру кутової швидкості не більш 2 UA 85766 U 5 0.018 град/с є також вповні достатньої для систем стабілізації. Для систем стабілізації високої точності максимальна кутова швидкість не більш ніж 1 град/с, тоді точність виміру кутової 5 швидкості по виразу (10) є не більш ніж 1.3 × 10- град/с (~ 0.05 град/год.). Таким чином, поставлена задача вирішена: компенсовано зміщення пуля гіроскопа за рахунок виявлення осі мінімальної добротності та встановлення коливань резонатору вздовж цієї осі та спрощення обробки інформації за рахунок вимірювання різності фаз первинних та вторинних коливань. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Балочний вібраційний гіроскоп, що містить балочний резонатор з електродами збудження і знімання інформації та блок збудження первинних коливань, який відрізняється тим, що в нього введений другий блок збудження первинних коливань, який подає на ортогональний електрод сигнал змінної амплітуди, піковий детектор, вхід якого з'єднаний з виходом другого блока збудження, блок завдання амплітуди коливань другого блока збудження, вхід якого з'єднаний з виходом пікового детектора, а його вихід з другим входом другого блока збудження, фазовий детектор, один вхід якого з'єднаний з виходом першого блока збудження, а інший вхід з'єднаний з електродом знімання вторинних коливань, а сигнал, пропорційний кутовій швидкості обертання, знімається з виходу фазового детектора. Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюChikovani Valerii Valerianovych
Автори російськоюЧиковани Валерий Валерианович
МПК / Мітки
МПК: G01C 19/56
Мітки: вібраційний, балочний, зміщення, компенсацією, нуля, гіроскоп
Код посилання
<a href="https://ua.patents.su/5-85766-balochnijj-vibracijjnijj-giroskop-z-kompensaciehyu-zmishhennya-nulya.html" target="_blank" rel="follow" title="База патентів України">Балочний вібраційний гіроскоп з компенсацією зміщення нуля</a>
Балочний вібраційний гіроскоп для систем стабілізації
Номер патенту: 85316
Опубліковано: 11.11.2013
Автори: Чіковані Валерій Валеріанович, Сущенко Ольга Андріївна
МПК: G01C 19/00
Мітки: гіроскоп, вібраційний, стабілізації, балочний, систем
Формула / Реферат:
Балочний вібраційний гіроскоп, що містить балочний резонатор з електродами збудження і знімання інформації та блок збудження первинних коливань, який відрізняється тим, що в нього введений фазовий детектор, один вхід якого з'єднаний з електродом знімання первинних коливань, а інший вхід з'єднаний з електродами знімання вторинних коливань, а сигнал, пропорційний кутовій швидкості обертання, знімається з виходу фазового детектора.
Цифровий коріолісівський вібраційний гіроскоп
Номер патенту: 101747
Опубліковано: 25.04.2013
Автори: Маляров Сергій Прокопович, Цирук Віктор Григорович, Ніколаєнко Алла Вікторівна
МПК: G01C 19/56
Мітки: цифровий, коріолісівський, вібраційний, гіроскоп
Формула / Реферат:
Цифровий коріолісівський вібраційний гіроскоп, що містить резонатор з електродами знімання та збудження, блок автопідстроювання частоти, блок стабілізації амплітуди коливань, блоки демодуляції і модуляції, а також блоки компенсації квадратурної та коріолісівської мод коливань і виміру кутової швидкості, який відрізняється тим, що в нього додатково вводяться смугові фільтри, електрично зв'язані з частотоміром, автогенератором та...
Вібраційний гіроскоп, чутливий до коріолісового прискорення
Номер патенту: 22153
Опубліковано: 10.04.2007
Автори: Коваленко Володимир Анатолійович, Яценко Юрій Олексійович, Чіковані Валерій Валеріанович
МПК: G01C 19/56
Мітки: чутливий, прискорення, вібраційний, коріолісового, гіроскоп
Формула / Реферат:
1. Вібраційний гіроскоп, чутливий до Коріолісового прискорення, який містить основу, резонатор, виконаний у вигляді циліндра з днищем, п'єзоелектричні елементи збудження і знімання інформації та вимірювальний контур, який відрізняється тим, що резонатор має нижню і верхню частини, при цьому нижня частина циліндра, з'єднана з днищем, виконана гнучкою з меншою товщиною стінок, ніж верхня жорстка частина, в днищі виконана множина отворів,...
Мікромеханічний гіроскоп
Номер патенту: 85528
Опубліковано: 25.11.2013
Автори: Бондар Павло Михайлович, Лошкарьова Катерина Валеріївна
МПК: G01B 7/02
Мітки: гіроскоп, мікромеханічний
Формула / Реферат:
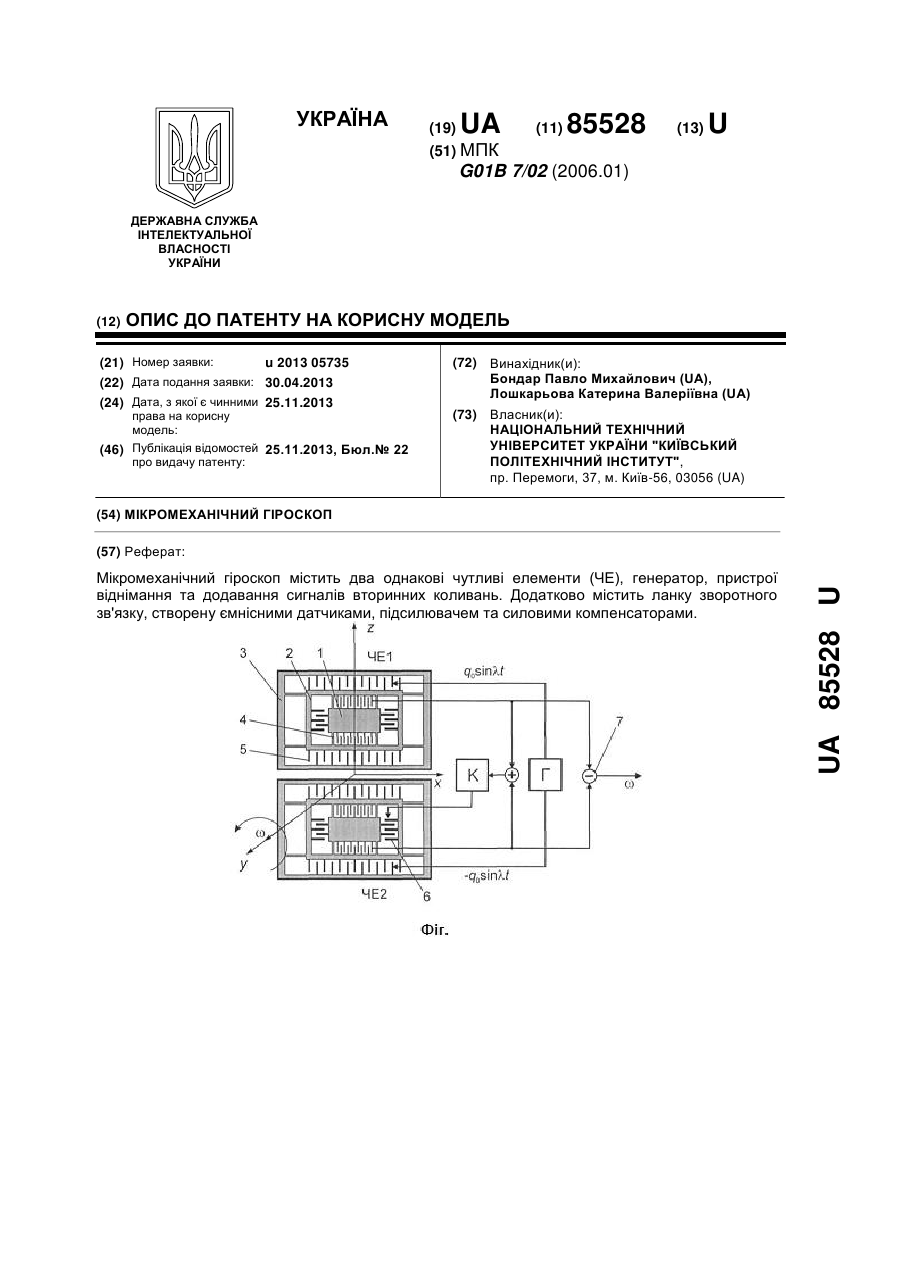
Мікромеханічний гіроскоп, що містить два однакові чутливі елементи (ЧЕ), генератор, пристрої віднімання та додавання сигналів вторинних коливань, який відрізняється тим, що додатково містить ланку зворотного зв'язку, створену ємнісними датчиками, підсилювачем та силовими компенсаторами.
Оптико-абсорбційна система газового аналізу з компенсацією дестабілізуючих факторів

Номер патенту: 73078
Опубліковано: 10.09.2012
Автори: Дудатьєв Ігор Андрійович, Кучерук Володимир Юрійович
МПК: G01N 21/61
Мітки: факторів, газового, аналізу, оптико-абсорбційна, дестабілізуючих, компенсацією, система
Формула / Реферат:
Оптико-абсорбційна система газового аналізу з компенсацією дестабілізуючих факторів, що містить джерело інфрачервоного випромінювання, робочий та порівняльний кювет, обтюратор, вихід якого з'єднано з входом інтерференційного світлофільтра, вихід якого з'єднано з входом концентратора, вихід якого з'єднано з входом фотоприймача, вихід якого з'єднано з входом основного підсилювача, вихід якого з'єднано з першим входом синхронного детектора,...
Попередній патент: Ґрунтообробний робочий орган
Наступний патент: Календар
Випадковий патент: Склад протипухлинного препарату у вигляді розчину на основі цис-дихлородіамінплатини