Спосіб формування вирішальної функції кореляційно-екстремальних систем навігації за критерієм максимуму узагальненого коефіцієнта взаємної кореляції
Номер патенту: 122637
Опубліковано: 25.01.2018
Автори: Сидоренко Руслан Григорович, Грідін Володимир Іванович, Танцюра Олександр Борисович, Єрьоміна Наталія Сергіївна, Сотніков Олександр Михайлович, Таршин Володимир Анатолійович, Мегельбей Ганна Василівна, Резніченко Анатолій Іванович

Формула / Реферат
Спосіб забезпечення корекції траєкторії літального апарата шляхом формування вирішальної функції кореляційно-екстремальних систем навігації за критерієм максимуму узагальненого коефіцієнта взаємної кореляції, який полягає у застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності), при цьому вимірюють або відстань між зображеннями, або міру їх близькості, який відрізняється тим, що додатково формують матрицю часткових вирішальних функцій, побудованих для кожного з елементів розрізнення.
Текст
Реферат: Спосіб забезпечення корекції траєкторії літального апарата шляхом формування вирішальної функції кореляційно-екстремальних систем навігації за критерієм максимуму узагальненого коефіцієнта взаємної кореляції полягає у застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності). Вимірюють або відстань між зображеннями, або міру їх близькості та додатково формують матрицю часткових вирішальних функцій, побудованих для кожного з елементів розрізнення. UA 122637 U (12) UA 122637 U UA 122637 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до навігації та управління рухом і може бути використана для оптимізації процесу визначення просторового положення літальних апаратів (ЛА), а також при створенні сучасних кореляційно-екстремальних систем навігації (КЕСН). Найбільш близьким до запропонованого технічним рішенням, обраним як прототип, є "Спосіб забезпечення максимальних значень точності та імовірності місце визначення ЛА з КЕСН" [1], що передбачає застосування класичного кореляційного алгоритму, який використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності), при цьому вимірюється або відстань між зображеннями, або міра їх близькості. Недоліком способу-прототипу є те, що він не забезпечує формування вирішальної функції (ВФ) КЕСН в умовах впливу перспективних спотворень (геометричних спотворень, що виникають в залежності від геометрії візування КЕСН). В основу корисної моделі поставлена задача створити спосіб формування вирішальної функції кореляційно-екстремальних систем навігації за критерієм максимуму узагальненого коефіцієнта взаємної кореляції, який дозволить зменшити вплив перспективних спотворень на ефективність функціонування КЕСН. Поставлена задача вирішується тим, що у способі-прототипі, який передбачає застосування класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності), при цьому вимірюється або відстань між зображеннями, або міра їх близькості, додатково формується матриця часткових вирішальних функцій, побудованих для кожного з елементів розрізнення. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у забезпеченні корекції траєкторії ЛА КЕСН в умовах різного роду перспективних спотворень поточного зображення (ПЗ), які обумовлені геометрією візування і призводять до появи відмінностей ПЗ і еталонного зображення (ЕЗ). На кресленні приведена реалізація запропонованого способу у вигляді структурної схеми алгоритму. Суть запропонованого способу формування вирішальної функції кореляційноекстремальних систем навігації за критерієм максимуму узагальненого коефіцієнта взаємної кореляції полягає у формуванні додаткової матриці часткових вирішальних функцій, побудованих для кожного з елементів розрізнення при застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності), при цьому вимірюється або відстань між зображеннями, або міра їх близькості. Відповідно до узагальненої структурної схеми КЕСН, [2] вирішальна функція R(t,r,), що формується системою навігації має вигляд: R(t,r,) = F[SCI(t,),SRI], (1) де t - параметр часу; r - вектор зсуву ПЗ SCI (t,) відносно ЕЗ SRI (); - кут візування, що визначає перспективні спотворення поточного зображення S CI(t,). Модель поточного зображення SCI(t,), з урахуванням впливу середовища розповсюдження та шумів приймальної системи, має вигляд: Sci (t, ) = FRS {FPM [FOS ((t), (t))] n(t), } , (2) де FRS - оператор первинної обробки інформації в приймальній системі КЕСН; FPM - оператор середовища розповсюдження сигналів; FOS - оператор, що описує яскравість (відбивну здатність) елементів поверхні візування (ПВ) в залежності від діелектричної (t) та магнітної (t) проникностей об'єктів і фонів; n(t) - адитивний шум приймальної системи. Така модель ПЗ справедлива в разі, якщо поворот ПЗ щодо ЕЗ відсутній. В іншому випадку модель ПЗ повинна враховувати геометричні спотворення, обумовлені геометрією візування. Для урахування впливу перспективних спотворень використовується модель ПВ, яка враховує кореляційні властивості зображень ПВ та являє собою узагальнений телеграфний процес [2]. Вибір фрагмента місцевості для побудови ЕЗ здійснюється кореляційним методом на основі побудови взаємної кореляційної функції (ВКФ) та пошуку її максимального значення. Враховуючи нерівномірність спотворень зображення, пошук максимального значення ВКФ здійснюється шляхом побудови окремих ВКФ для кожного елемента розрізнення та побудови узагальненої ВКФ. 1 UA 122637 U 5 10 15 20 25 30 35 Для формування часткових вирішальних функцій для різних кутів візування використовується сукупність G еталонних зображень, G-1 з яких побудовані з урахуванням виникнення перспективних спотворень зображення ПВ відповідно до виразу: SRI =||SRI1(1) SRI2(2) … SRG(G)||, (3) де SRI2 (2), SRIG(G) - ЕЗ, сформовані при наявності перспективних спотворень. В подальшому відповідно до виразу (1) формуються часткові ВФ Rg(t,r,,g) = F[SCI(t,),SRI(g)]. (4) Результати аналізу оцінки коефіцієнта кореляції та середньоквадратичної похибки суміщення ПЗ та ЕЗ з різною об'єктовою насиченістю свідчать про суттєвий вплив перспективних спотворень на ВФ, що обумовлює необхідність їх врахування при місцевизначенні КЕСН. Визначення максимального значення коефіцієнта взаємної кореляції ПЗ та ЕЗ здійснюється шляхом одночасного формування сукупності часткових ВФ відповідно до виразу (4). При цьому максимальне значення Rg(t,r,,g) забезпечується за умови -g min , виконання якої забезпечує мінімальне значення похибки місцевизначення КЕСН, тому: Rr Rgmax t,r,,g Rgmax t,r min. (5) Одержані шляхом моделювання чисельні оцінки коефіцієнта взаємної кореляції та середньоквадратичної помилки суміщення ПЗ та ЕЗ з різною об'єктовою насиченістю дозволяють зменшити помилки місцевизначення КЕСН при використанні для прив'язки ділянок ПВ з нормальною та низькою об'єктовою насиченістю, оскільки на ділянках ПВ з високою об'єктовою насиченістю точність прив'язки буде гіршою. Таким чином уточнення місцевизначення КЕСН в умовах перспективних спотворень ПВ доцільно здійснювати шляхом формування матриці часткових ВФ, побудованих для кожного з елементів розрізнення, та визначення максимального значення узагальненої взаємної функції кореляції, яка в свою чергу визначає як імовірність правильної локалізації об'єкта прив'язки на ПВ, так і точність місцевизначення КЕСН. Джерела інформації 1. Баклицкий В.К. Корреляционно-экстремальные методы навигации и наведения / В.К. Баклицкий - Тверь: ТО «Книжный клуб», 2009. - 360 с. 2. Сотников A.M., Таршин В.А. Обоснование принципов построения и разработка модели корреляционно-экстремальной системы наведения комбинированного типа / A.M. Сотников, В.А. Таршин // Системи управління навігації та зв'язку. - К., 2012. - № 4(24). - С. 7-11. 3. Еремина Н.С. Обобщенная модель изображений поверхности визирования для представления в базах данных / Н.С. Еремина, Ю.В. Самсонов, A.M. Сотников // Збірник наукових праць. Системи управління, навігації та зв'язку. - Полтава, 2015. - №3 (35). - С. 77-79. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Спосіб забезпечення корекції траєкторії літального апарата шляхом формування вирішальної функції кореляційно-екстремальних систем навігації за критерієм максимуму узагальненого коефіцієнта взаємної кореляції, який полягає у застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності), при цьому вимірюють або відстань між зображеннями, або міру їх близькості, який відрізняється тим, що додатково формують матрицю часткових вирішальних функцій, побудованих для кожного з елементів розрізнення. 2 UA 122637 U Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 1/32
Мітки: навігації, узагальненого, систем, функції, формування, максимуму, критерієм, спосіб, кореляційно-екстремальних, коефіцієнта, вирішальної, взаємної, кореляції
Код посилання
<a href="https://ua.patents.su/5-122637-sposib-formuvannya-virishalno-funkci-korelyacijjno-ekstremalnikh-sistem-navigaci-za-kriteriehm-maksimumu-uzagalnenogo-koeficiehnta-vzaehmno-korelyaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування вирішальної функції кореляційно-екстремальних систем навігації за критерієм максимуму узагальненого коефіцієнта взаємної кореляції</a>
Спосіб формування зосередженого складного еталонного зображення для високоточних кореляційно-екстремальних систем навігації
Номер патенту: 100561
Опубліковано: 27.07.2015
Автори: Пєвцов Геннадій Володимирович, Сидоренко Руслан Григорович, Мегельбей Ганна Василівна, Сотніков Олександр Михайлович, Таршин Володимир Анатолійович, Рибалка Григорій Валерійович, Лупандін Володимир Анатолійович
МПК: G01S 1/32
Мітки: еталонного, спосіб, навігації, зосередженого, формування, систем, кореляційно-екстремальних, високоточних, зображення, складного
Формула / Реферат:
Спосіб формування зосередженого складного еталонного зображення для високоточних кореляційно-екстремальних систем навігації, який полягає у формуванні еталонного зображення за допомогою локалізації інформативних ділянок зображень поверхні візування, що має заданий набір характерних ознак та розташоване поблизу траєкторії руху літального апарата, який відрізняється тим, що додатково поетапно послідовно змінюються (як правило, збільшуються)...
Спосіб формування багатоелементного розподіленого еталонного зображення для високоточних кореляційно-екстремальних систем навігації
Номер патенту: 100559
Опубліковано: 27.07.2015
Автори: Сотніков Олександр Михайлович, Лупандін Володимир Анатолійович, Пєвцов Геннадій Володимирович, Сидоренко Руслан Григорович, Таршин Володимир Анатолійович, Булай Андрій Миколайович, Мегельбей Ганна Василівна
МПК: G01S 1/32
Мітки: високоточних, еталонного, кореляційно-екстремальних, розподіленого, навігації, спосіб, формування, зображення, систем, багатоелементного
Формула / Реферат:
Спосіб формування багатоелементного розподіленого еталонного зображення для високоточних кореляційно-екстремальних систем навігації, який полягає у формуванні еталонного зображення за допомогою локалізації інформативних ділянок зображень поверхні візування, що мають заданий набір характерних ознак та розташовані поблизу траєкторії руху літального апарата, який відрізняється тим, що додатково вводяться декілька елементів інформативних...
Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінювання крутизни вирішальної функції в області максимуму при використанні сукупності інформативних полів
Номер патенту: 120923
Опубліковано: 27.11.2017
Автори: Танцюра Олександр Борисович, Скопінцев Олег Олександрович, Мегельбей Ганна Василівна, Сидоренко Руслан Григорович, Акулінін Єгор Глібович, Таршин Володимир Анатолійович, Сотніков Олександр Михайлович
МПК: G01S 1/32
Мітки: інформативних, основі, спосіб, літальних, оцінювання, використанні, крутизни, точності, максимуму, вирішальної, функції, сукупності, області, місцевизначення, імовірності, забезпечення, полів, апаратів
Формула / Реферат:
Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінювання крутизни вирішальної функції в області максимуму при використанні сукупності інформативних полів, який полягає у застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном, який відрізняється тим, що формується вирішальна функція, по сукупності полів яскравості та контрасту за допомогою...
Спосіб фрактального аналізу зображень з високою об’єктовою насиченістю для синтезу еталонних зображень кореляційно-екстремальних систем навігації літальних апаратів
Номер патенту: 93034
Опубліковано: 10.09.2014
Автори: Лупандін Володимир Анатолійович, Таршин Володимир Анатолійович, Пащенко Руслан Едуардович, Сотніков Олександр Михайлович, Сидоренко Руслан Григорович
МПК: G01S 1/00
Мітки: еталонних, навігації, апаратів, спосіб, об'єктовою, синтезу, систем, насиченістю, кореляційно-екстремальних, літальних, високою, фрактального, зображень, аналізу
Формула / Реферат:
Спосіб фрактального аналізу зображень з високою об'єктовою насиченістю для синтезу еталонних зображень кореляційно-екстремальних систем навігації літальних апаратів, який полягає у локалізації інформативних областей зображень та виділенні ділянок зображень унікального топологічного складу з максимальною яскравістю шляхом побудови селективних зображень в заданому діапазоні фрактальної розмірності, який відрізняється тим, що додатково...
Пристрій для визначення вибіркового коефіцієнта взаємної кореляції між струмом і напругою електричної дуги
Номер патенту: 122466
Опубліковано: 10.01.2018
Автори: Смірнова Наталія Володимирівна, Смірнов Володимир Вікторович
МПК: G06F 17/15, B23K 9/10
Мітки: взаємної, напругою, визначення, вибіркового, пристрій, дуги, струмом, коефіцієнта, кореляції, електричної
Формула / Реферат:
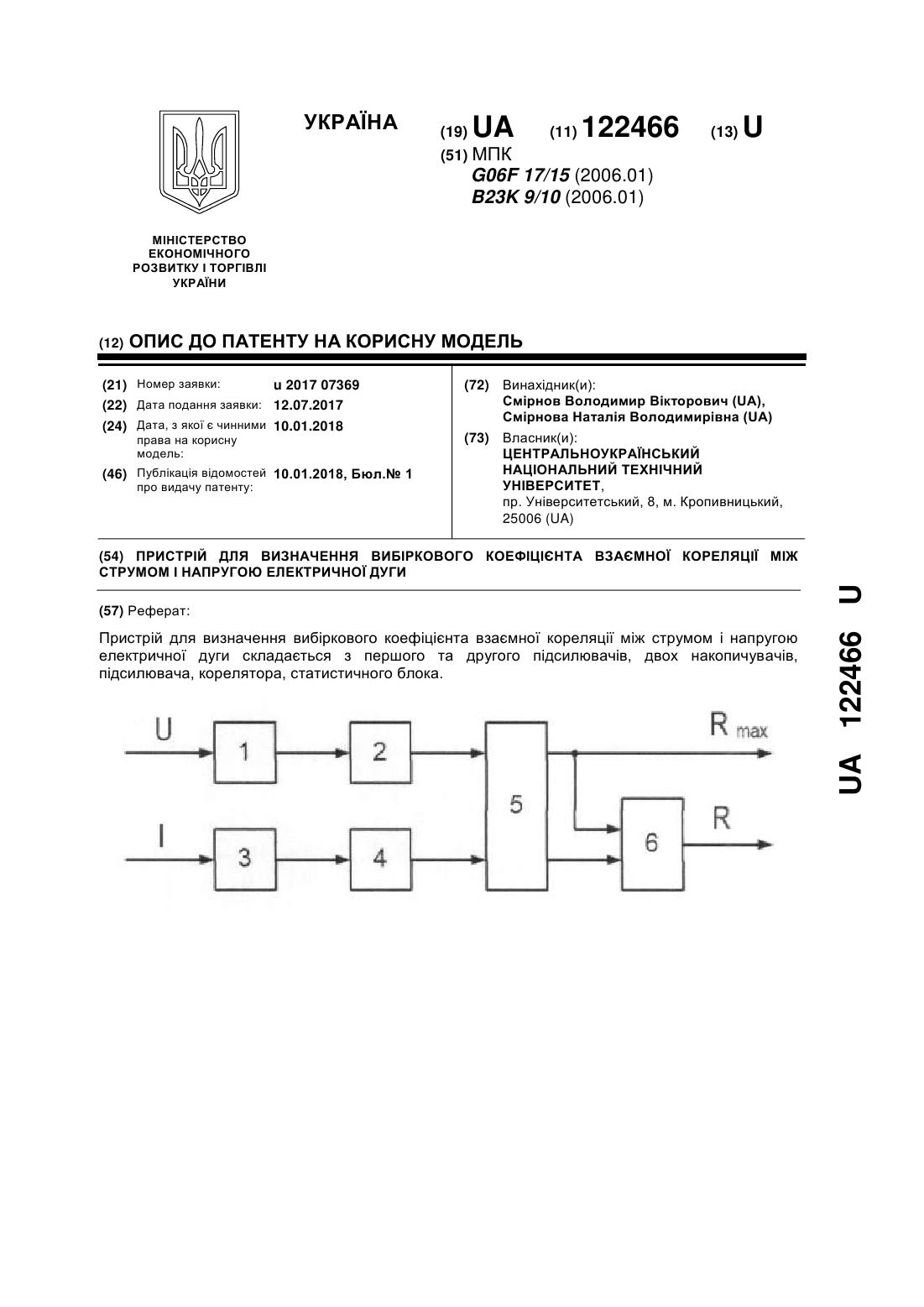
Пристрій для визначення вибіркового коефіцієнта взаємної кореляції між струмом і напругою електричної дуги, який відрізняється тим, що складається з першого підсилювача, вхід якого є першим входом пристрою, накопичувача, вхід якого з'єднаний з виходом першого підсилювача, а вихід якого з'єднаний з першим входом корелятора, другого підсилювача, вхід якого є другим входом пристрою, накопичувача, вхід якого з'єднаний з виходом другого...
Попередній патент: Водовідвідна система акумуляційно-поглинального типу
Наступний патент: Склад житньо-пшеничного хліба підвищеної харчової та біологічної цінності
Випадковий патент: Імпрегнатор для шліфувальних кругів на керамічних зв`язках