Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінювання крутизни вирішальної функції в області максимуму при використанні сукупності інформативних полів
Номер патенту: 120923
Опубліковано: 27.11.2017
Автори: Сидоренко Руслан Григорович, Сотніков Олександр Михайлович, Акулінін Єгор Глібович, Скопінцев Олег Олександрович, Таршин Володимир Анатолійович, Мегельбей Ганна Василівна, Танцюра Олександр Борисович
Формула / Реферат
Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінювання крутизни вирішальної функції в області максимуму при використанні сукупності інформативних полів, який полягає у застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном, який відрізняється тим, що формується вирішальна функція, по сукупності полів яскравості та контрасту за допомогою зважування її складових, які відповідають спотворенням поверхні візування, та додаткова оцінка, яка характеризує вплив спотворень на поточне зображення.
Текст
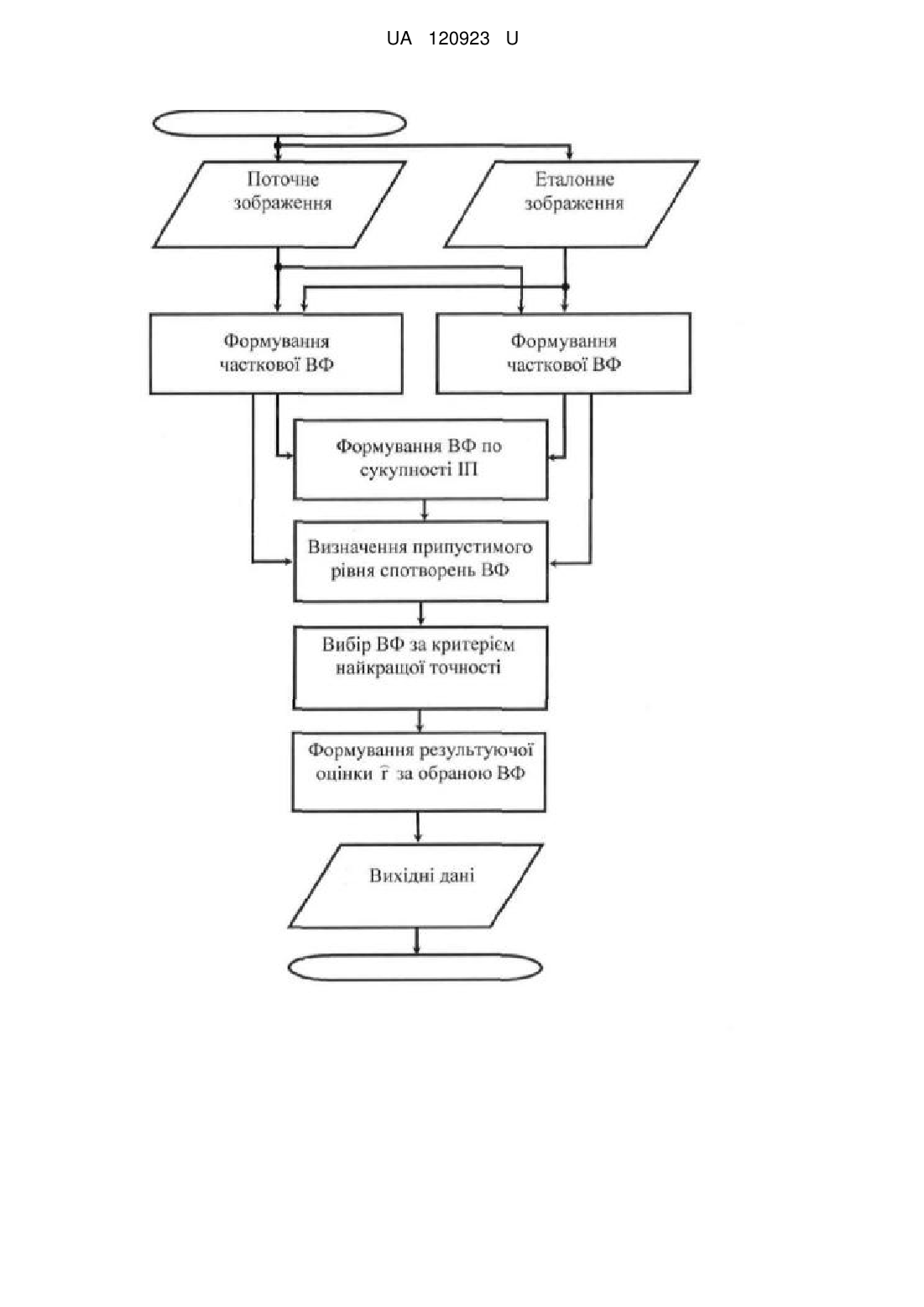
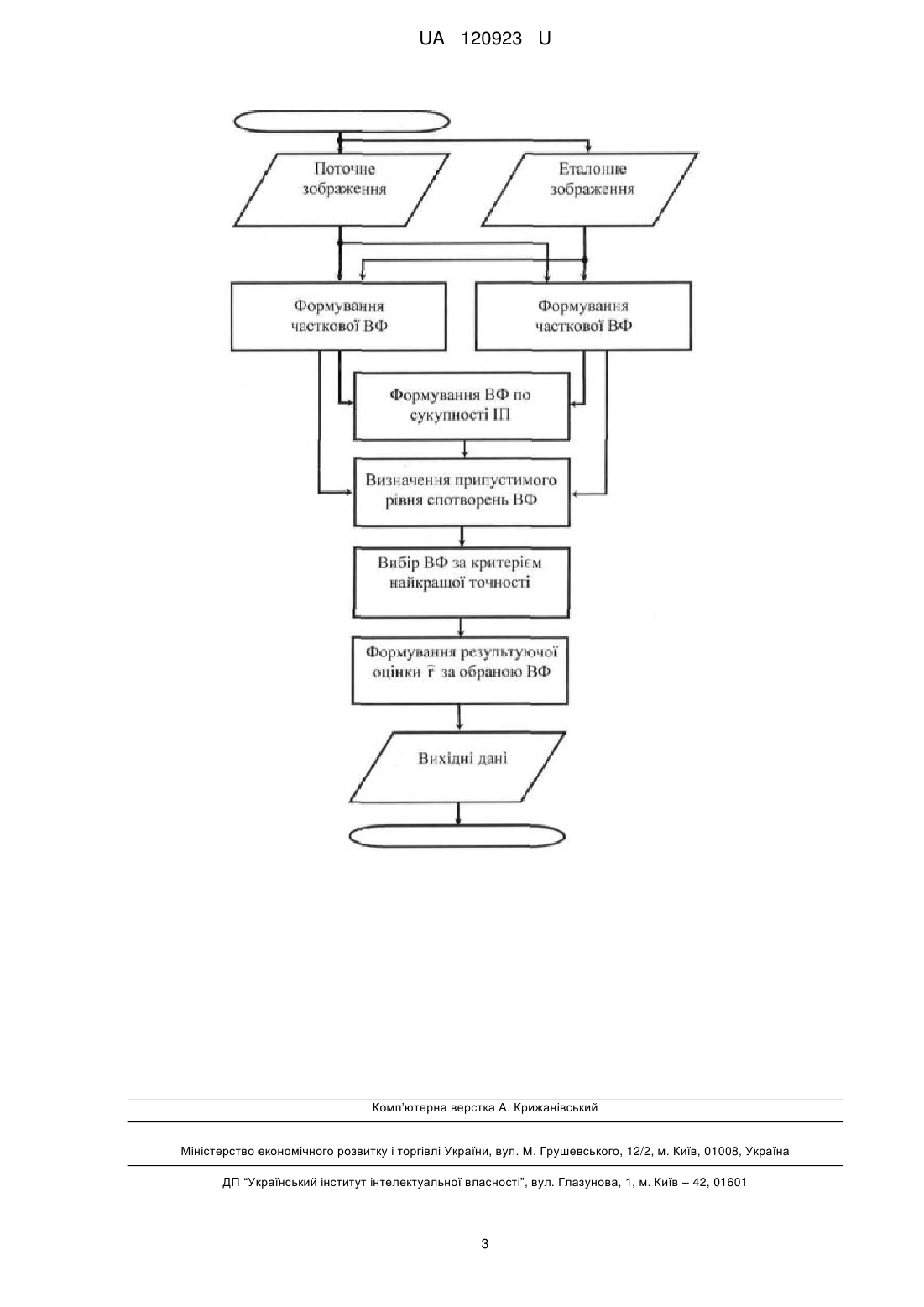
Реферат: Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінювання крутизни вирішальної функції в області максимуму при використанні сукупності інформативних полів полягає у застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном. При цьому формується вирішальна функція, по сукупності полів яскравості та контрасту за допомогою зважування її складових, які відповідають спотворенням поверхні візування, та додаткова оцінка, яка характеризує вплив спотворень на поточне зображення. UA 120923 U (12) UA 120923 U UA 120923 U 5 10 15 20 25 30 35 Запропонована корисна модель належить до галузі навігації та управління рухом і може бути використана для оптимізації процесу визначення просторового положення літальних апаратів (ЛА), а також при створенні сучасних кореляційно-екстремальних систем навігації (КЕСН). Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є "Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі використання сукупності інформативних полів" [1], що передбачає застосування класичного кореляційного алгоритму, який використовує порівняння поточного зображення з еталоном і ґрунтується на формуванні вирішальної функції по сукупності полів яскравості та контрасту за допомогою зважування її складових, які відповідають спотворенням поверхні візування. Недоліком способу-прототипу є те, що він не визначає ступінь впливу спотворень поверхні візування (ПВ) на результат формування вирішальної функції (ВФ), що не дає можливість забезпечити необхідні точність та імовірність місцевизначення ЛА в умовах спотворень. В основу корисної моделі поставлена задача створити спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінювання крутизни вирішальної функції в області максимуму при використанні сукупності інформативних полів, який дозволить отримувати команди на корекцію траєкторії КЕСН ЛА в умовах різних типів спотворень ПВ. Поставлена задача вирішується за рахунок того, що у способі-прототипі, який передбачає застосування класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном і ґрунтується на формуванні вирішальної функції по сукупності полів яскравості та контрасту за допомогою зважування її складових, які відповідають спотворенням поверхні візування, додатково формується оцінка, яка характеризує вплив спотворень на поточне зображення (ПЗ). Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у забезпеченні потрібних точності та імовірності місцевизначення ЛА в умовах застосування перешкод, засобів маскування і зниження помітності, природних змін ПВ, що призводять до появи відмінностей ПЗ і еталонного зображення (ЕЗ). На кресленні приведена реалізація запропонованого способу у вигляді структурної схеми алгоритму. Суть запропонованого способу забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінювання крутизни ВФ в області максимуму при використанні сукупності інформаційних полів полягає у застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном та ґрунтується на формуванні вирішальної функції, по сукупності полів яскравості та контрасту за допомогою зважування її складових, які відповідають спотворенням поверхні візування та у додатковій оцінці, яка характеризує вплив спотворень на поточне зображення. Додаткова оцінка ВФ [2] отримується за виразом: Rmax max RВФ r . 40 45 (1) Відмінність Rmax від значення взаємної кореляційної функції (ВКФ), означає наявність спотворень ПЗ [3]. Оцінене значення Rmax , як результат когерентної обробки зображень, є інтегральною оцінкою впливу спотворень на результат формування ВФ у області прив'язки. Допустимий вплив спотворень на ВФ визначається шляхом порівняння Rmax із заданим порогом: R пор R max 1 . (2) Оскільки такий підхід до визначення спотворень на ПВ дозволяє визначати лише їх наявність, тобто забезпечити їх виявлення, то отримуваний результат характеризується показниками якості виявлення, а значення порогу Rпор визначається умовною імовірністю 50 хибної тривоги у відповідності з визначеним критерієм виявлення. У разі додаткового оцінювання крутизни ВФ в області максимуму при використанні декількох ІП одного датчика забезпечується мінімальне значення помилки місцевизначення. Шляхом порівняння Rmax зі значеннями відповідних їм параметрів ІП, одержаних на етапі формування ЕЗ, визначається зміна ВФ у області максимуму, яка обумовлена спотвореннями 1 UA 120923 U ПВ. Така зміна максимального значення є узагальненою оцінкою спотворення ІП при повному суміщенні ПЗ та ЕЗ та визначається співвідношеннями: R ПКАЯ r K ПКАЯ r R max ПК АЯ r , RПКАК r K ПКАК r R maxПК АК r , R ПКА r K ПКА r R max ПК А r , 5 10 15 20 25 (3) (4) (5) де RПКАЯ r , RПКАК r , та KПКА r - значення параметрів ІП яскравості, контрасту та їх сукупності у точці r , одержані на етапі синтезу. Таким чином застосування розробленого способу формування ВФ з додатковою оцінкою параметрів ВФ дозволяє визначати ступінь впливу спотворень ПВ на результат формування ВФ та забезпечувані КЕСН точність і імовірність місцевизначення в умовах спотворень. Окрім цього, за результатами оцінки параметрів ВФ можуть бути визначені умови, коли потрібні значення вимог, що висуваються до КЕСН, не можуть бути забезпечені. Розроблений спосіб передбачає виконання всіх процедур машинним способом, що дозволить скоротити інтервал часу між здобуттям вихідних даних і формуванням польотного завдання. Джерела інформації: 1. Баклицкий В.К. Корреляционно-экстремальные методы навигации и наведения /В.К. Баклицкий - Тверь: ТО "Книжный клуб", 2009. - 360 с. 2. Таршин В.А. Подготовка эталонных изображений для высокоточных корреляционноэкстремальных систем навигации на основе использования прямого корреляционного анализа /В.А. Таршин, A.M. Сотников, Р.Г. Сидоренко, В.В. Мегельбей //Системи озброєння і військова техніка. - X., 2015. - № 2 (42). - С. 142-144. 3. Таршин В.А. Принципы описания фоново-объектовой обстановки для корреляционнноэкстремальных систем навигации Техническое зрение в системах управления - 2015: науч.техн. конф. Федерального государственного бюджетного учреждения науки Института космических исследований Российской академии наук, 17-19 марта 2015 г.: тезисы докл. - М., 2015. - С. 75-76. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінювання крутизни вирішальної функції в області максимуму при використанні сукупності інформативних полів, який полягає у застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном, який відрізняється тим, що формується вирішальна функція, по сукупності полів яскравості та контрасту за допомогою зважування її складових, які відповідають спотворенням поверхні візування, та додаткова оцінка, яка характеризує вплив спотворень на поточне зображення. 2 UA 120923 U Комп’ютерна верстка А. Крижанівський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 1/32
Мітки: області, імовірності, крутизни, максимуму, інформативних, літальних, оцінювання, функції, полів, забезпечення, використанні, вирішальної, спосіб, сукупності, основі, точності, місцевизначення, апаратів
Код посилання
<a href="https://ua.patents.su/5-120923-sposib-zabezpechennya-tochnosti-ta-imovirnosti-misceviznachennya-litalnikh-aparativ-na-osnovi-ocinyuvannya-krutizni-virishalno-funkci-v-oblasti-maksimumu-pri-vikoristanni-sukupnost.html" target="_blank" rel="follow" title="База патентів України">Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінювання крутизни вирішальної функції в області максимуму при використанні сукупності інформативних полів</a>
Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі використання сукупності інформативних полів
Номер патенту: 113791
Опубліковано: 10.02.2017
Автори: Сидоренко Руслан Григорович, Танцюра Олександр Борисович, Сотніков Олександр Михайлович, Рибалка Григорій Валерійович, Єрьоміна Наталія Сергіївна, Таршин Володимир Анатолійович
МПК: G01S 1/32
Мітки: основі, імовірності, літальних, сукупності, інформативних, точності, апаратів, спосіб, забезпечення, полів, місцевизначення, використання
Формула / Реферат:
Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі використання сукупності інформативних полів, який полягає у застосуванні класичного кореляційного алгоритму, що використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності), при цьому вимірюється або відстань між зображеннями, або міра їх...
Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінки варіацій інформативних полів поверхні візування
Номер патенту: 113789
Опубліковано: 10.02.2017
Автори: Рибалка Григорій Валерійович, Таршин Володимир Анатолійович, Сидоренко Руслан Григорович, Танцюра Олександр Борисович, Сотніков Олександр Михайлович, Єрьоміна Наталія Сергіївна
МПК: G01S 1/32
Мітки: спосіб, точності, візування, місцевизначення, забезпечення, поверхні, полів, літальних, варіацій, інформативних, оцінки, основі, апаратів, імовірності
Формула / Реферат:
Спосіб забезпечення точності та імовірності місцевизначення літальних апаратів на основі оцінки варіацій інформативних полів поверхні візування, який полягає у застосуванні класичного кореляційного алгоритму, який використовує порівняння поточного зображення з еталоном і ґрунтується на розгляді зображень як двовимірних функцій яскравості (дискретних двовимірних матриць інтенсивності), при цьому вимірюється або відстань між зображеннями, або...
Процес синтезу гібридних алгоритмів багатоальтернативного розпізнавання образів на основі перевірки складних статистичних гіпотез за критерієм максимуму апостеріорної імовірності
Номер патенту: 32093
Опубліковано: 12.05.2008
Автори: Пєвцов Геннадій Володимирович, Фастовський Едуард Георгійович, Олійник Максим Олексійович
МПК: G06K 9/00
Мітки: образів, апостеріорної, алгоритмів, багатоальтернативного, гіпотез, статистичних, основі, гібридних, розпізнавання, максимуму, синтезу, імовірності, перевірки, критерієм, процес, складних
Формула / Реферат:
Процес синтезу гібридних алгоритмів багатоальтернативного розпізнавання образів на основі перевірки складних статистичних гіпотез за критерієм максимуму апостеріорної імовірності, в якому дані (значення кількісних ознак) отримуються з різноманітних технічних засобів, дані обробляються, вводиться складний еталонний опис та будується вирішальне правило, який відрізняється тим, що на етапі попереднього налаштування проводиться опитування...
Спосіб керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні
Номер патенту: 58102
Опубліковано: 25.03.2011
Автори: Манелюк Олександр Григорович, Галушка Володимир Іванович, Расстригін Олександр Олексійович, Столінець Сергій Леонідович, Польський Павло Вікторович, Сендецький Микола Миколайович, Балакін Сергій Геннадійович, Терлецький Ігор Іванович, Кириленко Володимир Анатолійович, Комаров Володимир Олександрович, Ткаченко Володимир Анатолійович, Безкровний Дмитро Володимирович, Асланян Альберт Едуардович, Стеценко Олексій Юрійович, Башинський Володимир Георгійович, Петєрін Микита Костянтинович, Припута Іван Петрович, Кузнецов Владлен Олександрович, Водчис Олександр Григорович, Зірка Андрій Леонідович, Бацман Богдан Сергійович, Гордієвський Олексій Тихонович, Ляшенко Ігор Олександрович, Попов Іван Анатольович, Лазуренко Олександр Вікторович, Зарицький Олег Іванович, Добровольський Юзеф Броніславович, Головещенко Ігор Васильович, Хижняк Андрій Сергійович
МПК: G01P 5/00, G08G 7/00, G05D 1/00
Мітки: пілотованих, літальних, спосіб, польотом, керування, використанні, дистанційно, апаратів, груповому
Формула / Реферат:
1. Спосіб керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні, при якому забезпечують зліт з базових аеродромів або стартових площадок N дистанційно пілотованих літальних апаратів, забезпечують переліт зазначених N літальних апаратів у точку збору, забезпечують у точці збору перебудування в групу, з наступним підльотом до зони протиповітряної оборони супротивника, прольотом/подоланням зони...
Спосіб виділення інформативних ділянок зображень на основі теорії фрактального аналізу
Номер патенту: 100560
Опубліковано: 27.07.2015
Автори: Сидоренко Руслан Григорович, Ковальчук Віктор Анатолійович, Мегельбей Ганна Василівна, Лупандін Володимир Анатолійович, Таршин Володимир Анатолійович, Пєвцов Геннадій Володимирович, Сотніков Олександр Михайлович
МПК: G01S 1/32
Мітки: зображень, ділянок, інформативних, теорії, виділення, аналізу, основі, фрактального, спосіб
Формула / Реферат:
Спосіб виділення інформативних ділянок зображень на основі теорії фрактального аналізу, який полягає у локалізації інформативних областей зображень та виділенні ділянок зображень унікального топологічного складу з максимальною яскравістю шляхом побудови селективних зображень в заданому діапазоні фрактальної розмірності Dmin.≤D≤Dmax., який відрізняється тим, що додатково використовуються спільні результати фрактального та...
Попередній патент: Спосіб діагностики розвитку атеросклерозу
Наступний патент: Спосіб переробки зерна проса в крупу плющену
Випадковий патент: Підтримуючий ролик конвеєра