Спосіб формування зосередженого складного еталонного зображення для високоточних кореляційно-екстремальних систем навігації
Номер патенту: 100561
Опубліковано: 27.07.2015
Автори: Пєвцов Геннадій Володимирович, Мегельбей Ганна Василівна, Таршин Володимир Анатолійович, Сидоренко Руслан Григорович, Сотніков Олександр Михайлович, Рибалка Григорій Валерійович, Лупандін Володимир Анатолійович

Формула / Реферат
Спосіб формування зосередженого складного еталонного зображення для високоточних кореляційно-екстремальних систем навігації, який полягає у формуванні еталонного зображення за допомогою локалізації інформативних ділянок зображень поверхні візування, що має заданий набір характерних ознак та розташоване поблизу траєкторії руху літального апарата, який відрізняється тим, що додатково поетапно послідовно змінюються (як правило, збільшуються) розміри еталонного зображення.
Текст
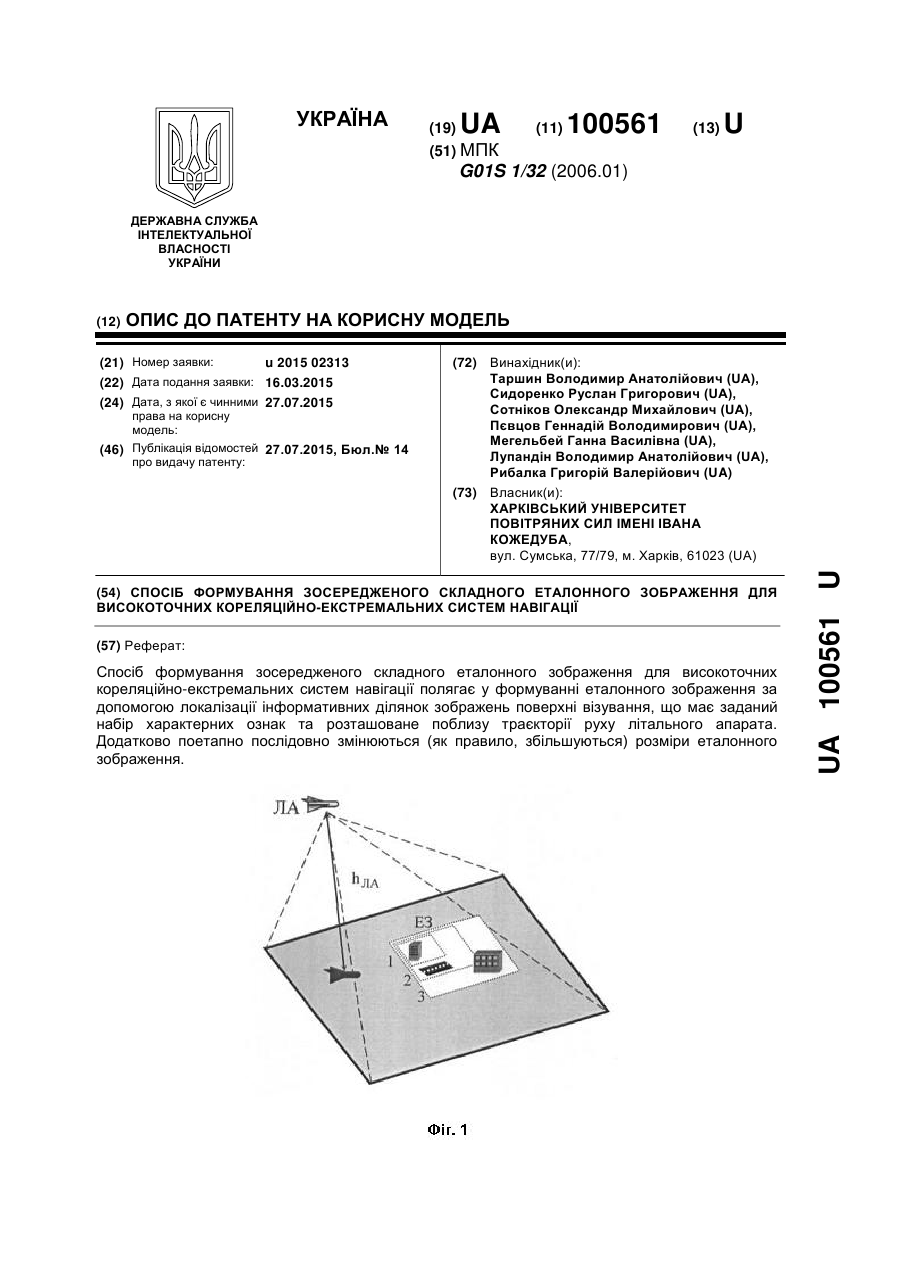
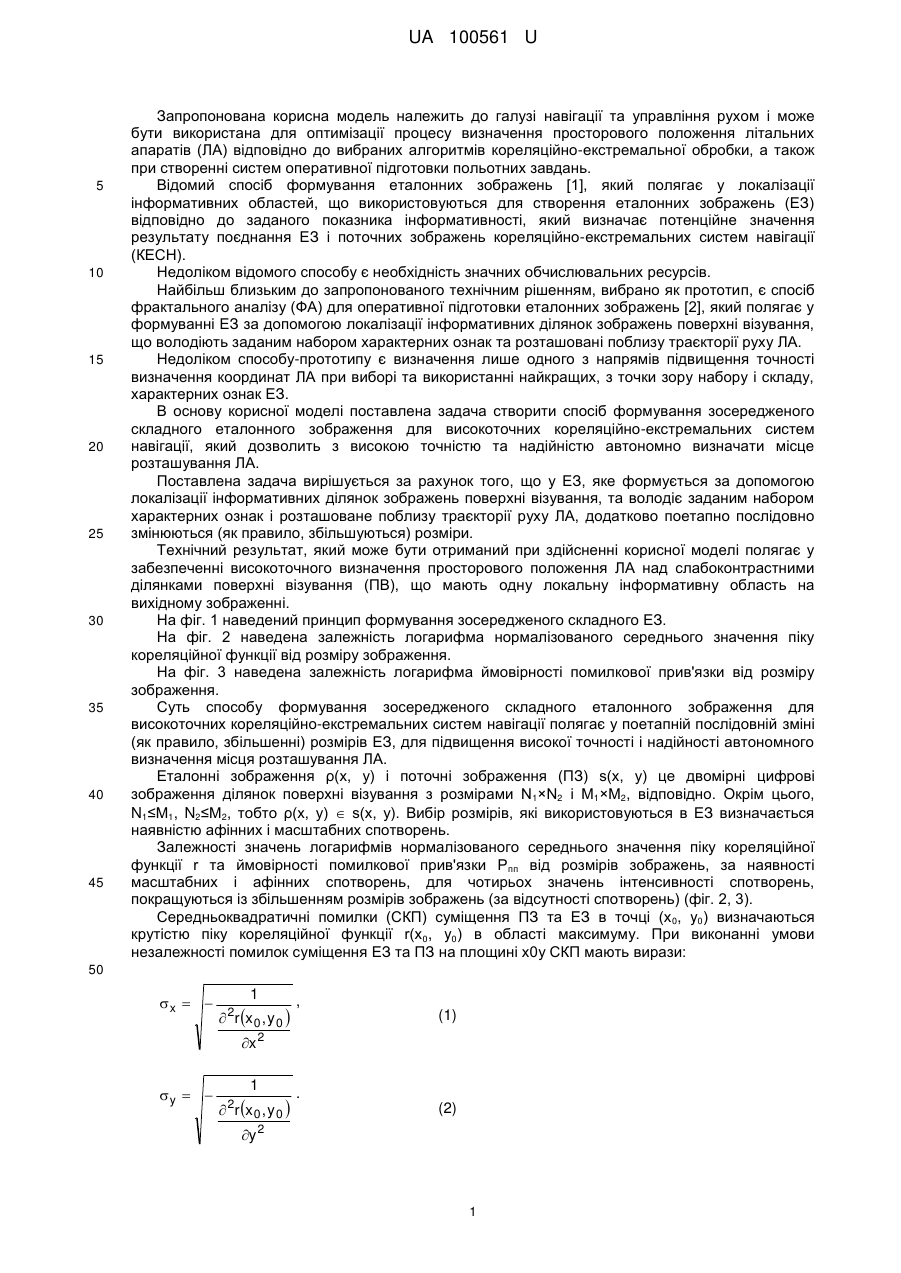
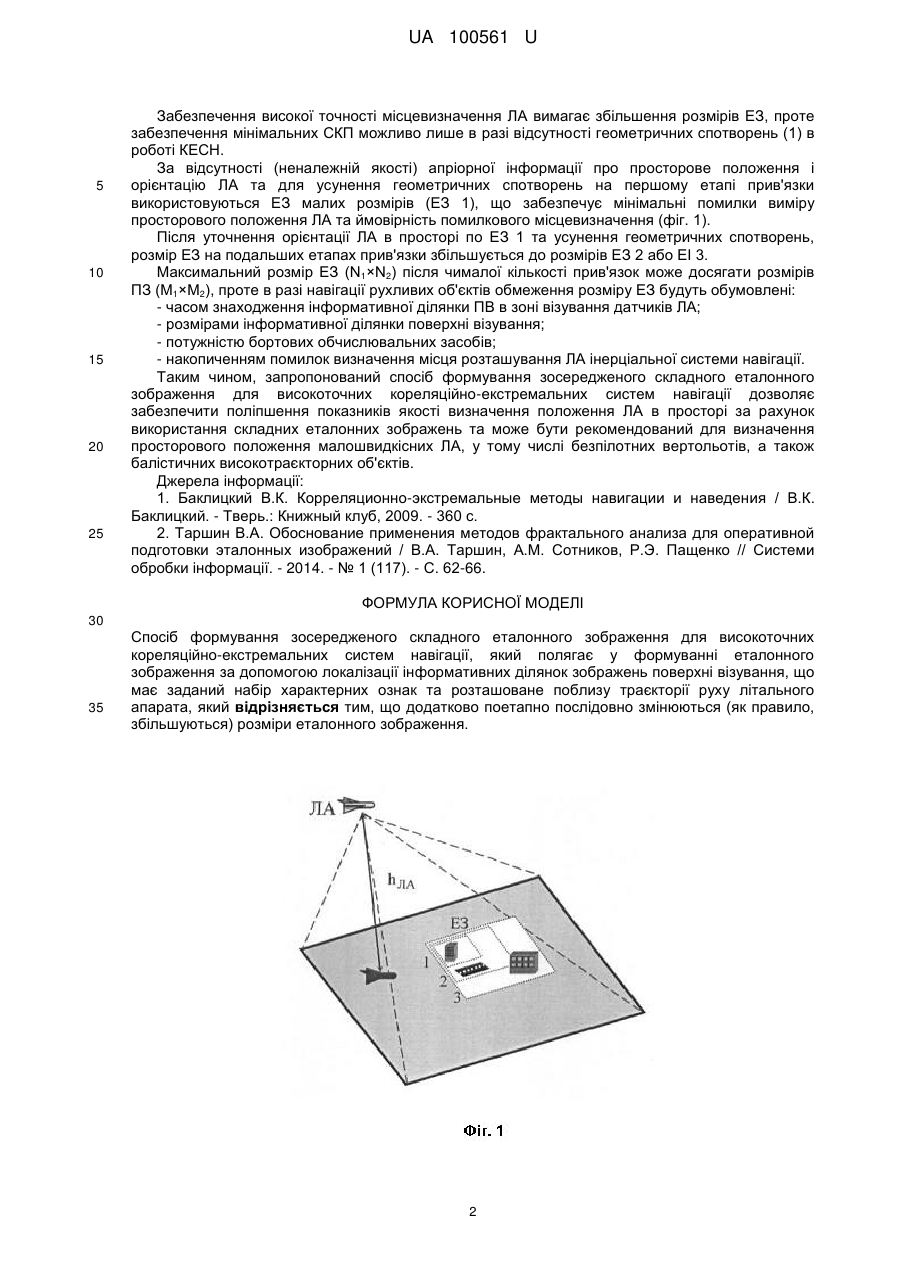
Реферат: Спосіб формування зосередженого складного еталонного зображення для високоточних кореляційно-екстремальних систем навігації полягає у формуванні еталонного зображення за допомогою локалізації інформативних ділянок зображень поверхні візування, що має заданий набір характерних ознак та розташоване поблизу траєкторії руху літального апарата. Додатково поетапно послідовно змінюються (як правило, збільшуються) розміри еталонного зображення. UA 100561 U (12) UA 100561 U UA 100561 U 5 10 15 20 25 30 35 40 45 Запропонована корисна модель належить до галузі навігації та управління рухом і може бути використана для оптимізації процесу визначення просторового положення літальних апаратів (ЛА) відповідно до вибраних алгоритмів кореляційно-екстремальної обробки, а також при створенні систем оперативної підготовки польотних завдань. Відомий спосіб формування еталонних зображень [1], який полягає у локалізації інформативних областей, що використовуються для створення еталонних зображень (ЕЗ) відповідно до заданого показника інформативності, який визначає потенційне значення результату поєднання ЕЗ і поточних зображень кореляційно-екстремальних систем навігації (КЕСН). Недоліком відомого способу є необхідність значних обчислювальних ресурсів. Найбільш близьким до запропонованого технічним рішенням, вибрано як прототип, є спосіб фрактального аналізу (ФА) для оперативної підготовки еталонних зображень [2], який полягає у формуванні ЕЗ за допомогою локалізації інформативних ділянок зображень поверхні візування, що володіють заданим набором характерних ознак та розташовані поблизу траєкторії руху ЛА. Недоліком способу-прототипу є визначення лише одного з напрямів підвищення точності визначення координат ЛА при виборі та використанні найкращих, з точки зору набору і складу, характерних ознак ЕЗ. В основу корисної моделі поставлена задача створити спосіб формування зосередженого складного еталонного зображення для високоточних кореляційно-екстремальних систем навігації, який дозволить з високою точністю та надійністю автономно визначати місце розташування ЛА. Поставлена задача вирішується за рахунок того, що у ЕЗ, яке формується за допомогою локалізації інформативних ділянок зображень поверхні візування, та володіє заданим набором характерних ознак і розташоване поблизу траєкторії руху ЛА, додатково поетапно послідовно змінюються (як правило, збільшуються) розміри. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у забезпеченні високоточного визначення просторового положення ЛА над слабоконтрастними ділянками поверхні візування (ПВ), що мають одну локальну інформативну область на вихідному зображенні. На фіг. 1 наведений принцип формування зосередженого складного ЕЗ. На фіг. 2 наведена залежність логарифма нормалізованого середнього значення піку кореляційної функції від розміру зображення. На фіг. 3 наведена залежність логарифма ймовірності помилкової прив'язки від розміру зображення. Суть способу формування зосередженого складного еталонного зображення для високоточних кореляційно-екстремальних систем навігації полягає у поетапній послідовній зміні (як правило, збільшенні) розмірів ЕЗ, для підвищення високої точності і надійності автономного визначення місця розташування ЛА. Еталонні зображення ρ(х, у) і поточні зображення (ПЗ) s(x, y) це двомірні цифрові зображення ділянок поверхні візування з розмірами N1×N2 і М1×М2, відповідно. Окрім цього, N1≤М1, N2≤M2, тобто ρ(х, у) s(x, у). Вибір розмірів, які використовуються в ЕЗ визначається наявністю афінних і масштабних спотворень. Залежності значень логарифмів нормалізованого середнього значення піку кореляційної функції r та ймовірності помилкової прив'язки Р пп від розмірів зображень, за наявності масштабних і афінних спотворень, для чотирьох значень інтенсивності спотворень, покращуються із збільшенням розмірів зображень (за відсутності спотворень) (фіг. 2, 3). Середньоквадратичні помилки (СКП) суміщення ПЗ та ЕЗ в точці (х 0, y0) визначаються крутістю піку кореляційної функції r(х0, y0) в області максимуму. При виконанні умови незалежності помилок суміщення ЕЗ та ПЗ на площині х0у СКП мають вирази: 50 x 1 r x 0 , y 0 2 , (1) x 2 y 1 r x 0 , y 0 2 y . (2) 2 1 UA 100561 U 5 10 15 20 25 Забезпечення високої точності місцевизначення ЛА вимагає збільшення розмірів ЕЗ, проте забезпечення мінімальних СКП можливо лише в разі відсутності геометричних спотворень (1) в роботі КЕСН. За відсутності (неналежній якості) апріорної інформації про просторове положення і орієнтацію ЛА та для усунення геометричних спотворень на першому етапі прив'язки використовуються ЕЗ малих розмірів (ЕЗ 1), що забезпечує мінімальні помилки виміру просторового положення ЛА та ймовірність помилкового місцевизначення (фіг. 1). Після уточнення орієнтації ЛА в просторі по ЕЗ 1 та усунення геометричних спотворень, розмір ЕЗ на подальших етапах прив'язки збільшується до розмірів ЕЗ 2 або ЕІ 3. Максимальний розмір ЕЗ (N1×N2) після чималої кількості прив'язок може досягати розмірів ПЗ (M1×M2), проте в разі навігації рухливих об'єктів обмеження розміру ЕЗ будуть обумовлені: - часом знаходження інформативної ділянки ПВ в зоні візування датчиків ЛА; - розмірами інформативної ділянки поверхні візування; - потужністю бортових обчислювальних засобів; - накопиченням помилок визначення місця розташування ЛА інерціальної системи навігації. Таким чином, запропонований спосіб формування зосередженого складного еталонного зображення для високоточних кореляційно-екстремальних систем навігації дозволяє забезпечити поліпшення показників якості визначення положення ЛА в просторі за рахунок використання складних еталонних зображень та може бути рекомендований для визначення просторового положення малошвидкісних ЛА, у тому числі безпілотних вертольотів, а також балістичних високотраєкторних об'єктів. Джерела інформації: 1. Баклицкий В.К. Корреляционно-экстремальные методы навигации и наведения / В.К. Баклицкий. - Тверь.: Книжный клуб, 2009. - 360 с. 2. Таршин В.А. Обоснование применения методов фрактального анализа для оперативной подготовки эталонных изображений / В.А. Таршин, A.M. Сотников, Р.Э. Пащенко // Системи обробки інформації. - 2014. - № 1 (117). - С. 62-66. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Спосіб формування зосередженого складного еталонного зображення для високоточних кореляційно-екстремальних систем навігації, який полягає у формуванні еталонного зображення за допомогою локалізації інформативних ділянок зображень поверхні візування, що має заданий набір характерних ознак та розташоване поблизу траєкторії руху літального апарата, який відрізняється тим, що додатково поетапно послідовно змінюються (як правило, збільшуються) розміри еталонного зображення. 2 UA 100561 U Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 1/32
Мітки: зосередженого, складного, навігації, зображення, кореляційно-екстремальних, еталонного, високоточних, спосіб, формування, систем
Код посилання
<a href="https://ua.patents.su/5-100561-sposib-formuvannya-zoseredzhenogo-skladnogo-etalonnogo-zobrazhennya-dlya-visokotochnikh-korelyacijjno-ekstremalnikh-sistem-navigaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування зосередженого складного еталонного зображення для високоточних кореляційно-екстремальних систем навігації</a>
Спосіб формування багатоелементного розподіленого еталонного зображення для високоточних кореляційно-екстремальних систем навігації
Номер патенту: 100559
Опубліковано: 27.07.2015
Автори: Сотніков Олександр Михайлович, Лупандін Володимир Анатолійович, Булай Андрій Миколайович, Таршин Володимир Анатолійович, Пєвцов Геннадій Володимирович, Сидоренко Руслан Григорович, Мегельбей Ганна Василівна
МПК: G01S 1/32
Мітки: еталонного, розподіленого, навігації, кореляційно-екстремальних, формування, багатоелементного, спосіб, зображення, систем, високоточних
Формула / Реферат:
Спосіб формування багатоелементного розподіленого еталонного зображення для високоточних кореляційно-екстремальних систем навігації, який полягає у формуванні еталонного зображення за допомогою локалізації інформативних ділянок зображень поверхні візування, що мають заданий набір характерних ознак та розташовані поблизу траєкторії руху літального апарата, який відрізняється тим, що додатково вводяться декілька елементів інформативних...
Спосіб фрактального аналізу зображень з високою об’єктовою насиченістю для синтезу еталонних зображень кореляційно-екстремальних систем навігації літальних апаратів
Номер патенту: 93034
Опубліковано: 10.09.2014
Автори: Сидоренко Руслан Григорович, Пащенко Руслан Едуардович, Лупандін Володимир Анатолійович, Таршин Володимир Анатолійович, Сотніков Олександр Михайлович
МПК: G01S 1/00
Мітки: аналізу, спосіб, синтезу, навігації, апаратів, фрактального, зображень, об'єктовою, еталонних, насиченістю, систем, літальних, кореляційно-екстремальних, високою
Формула / Реферат:
Спосіб фрактального аналізу зображень з високою об'єктовою насиченістю для синтезу еталонних зображень кореляційно-екстремальних систем навігації літальних апаратів, який полягає у локалізації інформативних областей зображень та виділенні ділянок зображень унікального топологічного складу з максимальною яскравістю шляхом побудови селективних зображень в заданому діапазоні фрактальної розмірності, який відрізняється тим, що додатково...
Спосіб формування зосередженого заряду з окремих зарядів
Номер патенту: 43141
Опубліковано: 10.08.2009
Автор: Лаврук Анатолій Зіновійович
Мітки: заряду, зосередженого, зарядів, спосіб, формування, окремих
Формула / Реферат:
1. Спосіб формування зосередженого заряду з окремих зарядів, при якому підготовляють один, два чи більше окремих зарядів, закріплюють на об'єкті підриву зазначені один, два чи більше окремих зарядів, при цьому при закріпленні на об'єкті підриву двох чи більше окремих зарядів їх розташовують на об'єкті підриву як із максимально щільним приляганням до поверхні об'єкта підриву, так і з щільним контактом між собою для здійснення безвідмовної...
Спосіб формування відеосигналів тепловізійного зображення та пристрій для формування тепловізійного зображення -тепловізор
Номер патенту: 77817
Опубліковано: 15.01.2007
Автори: Лихоліт Микола Іванович, Ріділа Олександр Степанович, Ємельянов Анатолій Миколайович, Саєнко Іван Якович
МПК: H04N 5/33
Мітки: формування, тепловізійного, спосіб, зображення, пристрій, відеосигналів, тепловізор
Формула / Реферат:
1. Спосіб формування відеосигналів телевізійного зображення, у якому інфрачервоне теплове зображення формують формувачем зображення шляхом паралельного сканування сцени, що спостерігається, причому у фокальну площину формувача зображення вводять калібрувальні рівні у вигляді двох еталонних джерел випромінювання, при цьому порядово розділяють відеосигнали з виходу кожного елемента фотоприймача, підсумовують уздовж кожного рядка, виробляють...
Пристрій для навігації сліпих людей
Номер патенту: 61592
Опубліковано: 25.07.2011
Автори: Лехцієр Леонід Романович, Крамар Микола Максимович, Стрігін Роман Генадійович, Аптекарь Михайло Давидович
Мітки: сліпих, пристрій, навігації, людей
Формула / Реферат:
Пристрій для навігації сліпих людей, що містить відеокамеру з вбудованим сканером дальності, блок формування відеозображення, сегментації фрагментів та аналізу їх координат, блок формування звукових образів зображень та синтезу мовних рекомендацій і блок гучномовців, який відрізняється тим, що пристрій оснащено блоком бази знань навколишньої місцевості і блоком ідентифікації місцевості та оптимізації маршруту, причому перший та другий вихід...
Попередній патент: Спосіб виділення інформативних ділянок зображень на основі теорії фрактального аналізу
Наступний патент: Коробка
Випадковий патент: Прояснювач для очищення води