Система керування гідравлічним багатоциліндровим пресом
Номер патенту: 12613
Опубліковано: 15.02.2006
Автори: Токарев Олексій Захарович, Смородинський Генріх Юхимович, Шевченко Микола Іванович, Волошин Олексій Іванович, Трембач Юрій Миколайович, Граматний Віктор Михайлович
Формула / Реферат
1. Система керування гідравлічним багатоциліндровим пресом, яка містить розподільники для регулювання і керування робочими, піднімальними і врівноважувальними циліндрами, зв'язаними між собою силовими і наповнювально-зливними гідролініями, оливосистему, яка відрізняється тим, що силові гідролінії робочих циліндрів виконані за двоконтурною схемою, в якій перший контур з’єднує ряд циліндрів? розташованих на подовжній осі преса, а другий - два ряди циліндрів, розташованих паралельно і симетрично подовжній осі, причому кожен контур має індивідуальне керування, включаючи гідролінії піднімальних і врівноважувальних циліндрів.
2. Система керування гідравлічним багатоциліндровим пресом за п. 1, яка відрізняється тим, що розподільники оснащені адаптивними регуляторами з програмним регулюючим пристроєм, що забезпечує можливість регулювання швидкості, зусилля, точності позиціювання, а також переключення режиму роботи преса.
3. Система керування гідравлічним багатоциліндровим пресом за пп. 1 і 2, яка відрізняється тим, що адаптивні регулятори виконані у вигляді попарно взаємодіючих дволінійних дроселів, клапани яких виконані з верхнім і нижнім направляючими хвостовиками і з розвантажувальним діагональним каналом, що з'єднує надклапанну і підклапанну порожнини, обладнані датчиками лінійних переміщень, установленими поза контактом з робочою рідиною, і оснащені індивідуально керованими сервоциліндрами, обладнаними незалежними взаємоблокуючими системами дискретного керування і сервокерування з живленням від оливосистеми.
4. Система керування гідравлічним багатоциліндровим пресом за пп. 1 і 2, яка відрізняється тим, що гідролінії кутових циліндрів другого контуру додатково оснащені розподільниками з адаптивними регуляторами.
Текст
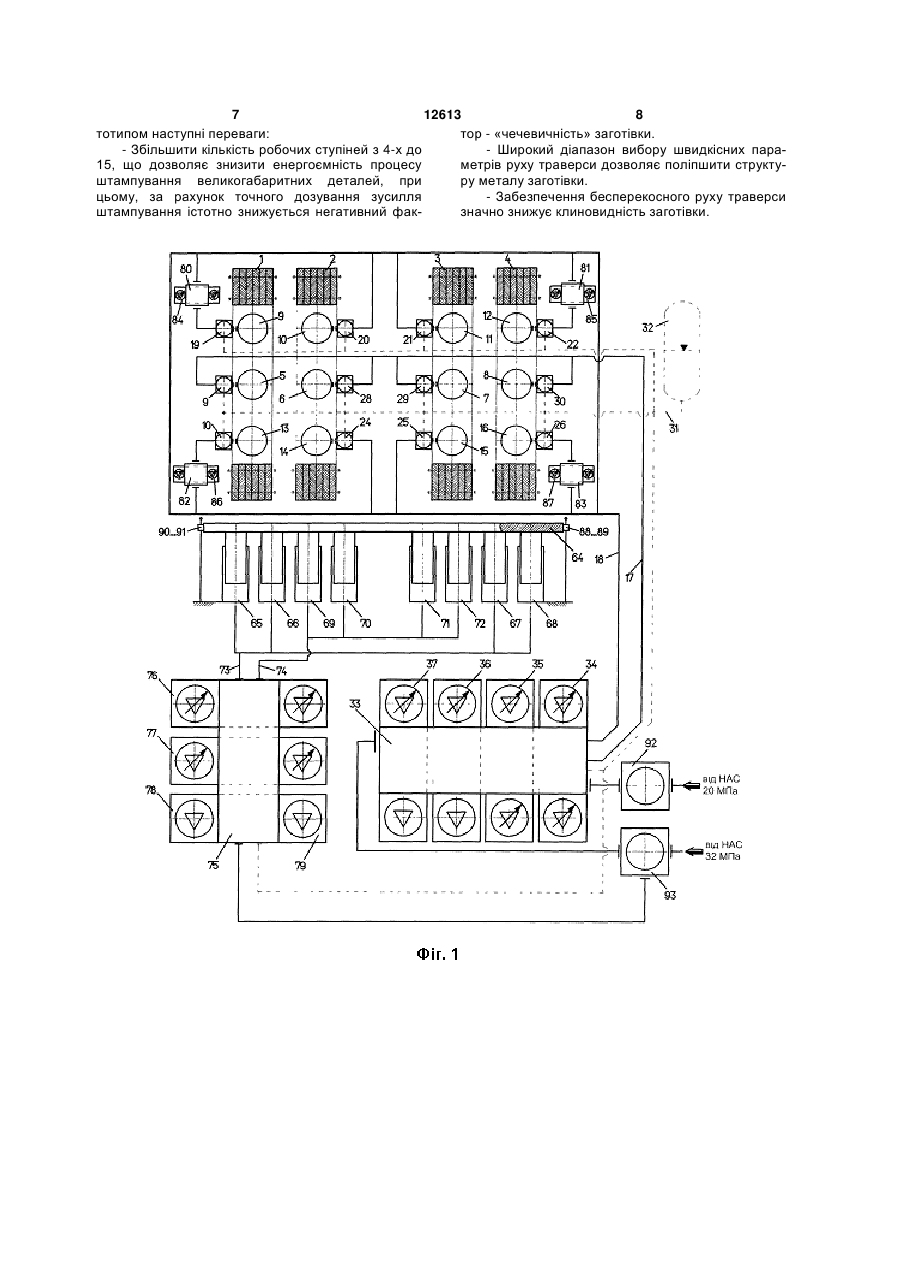
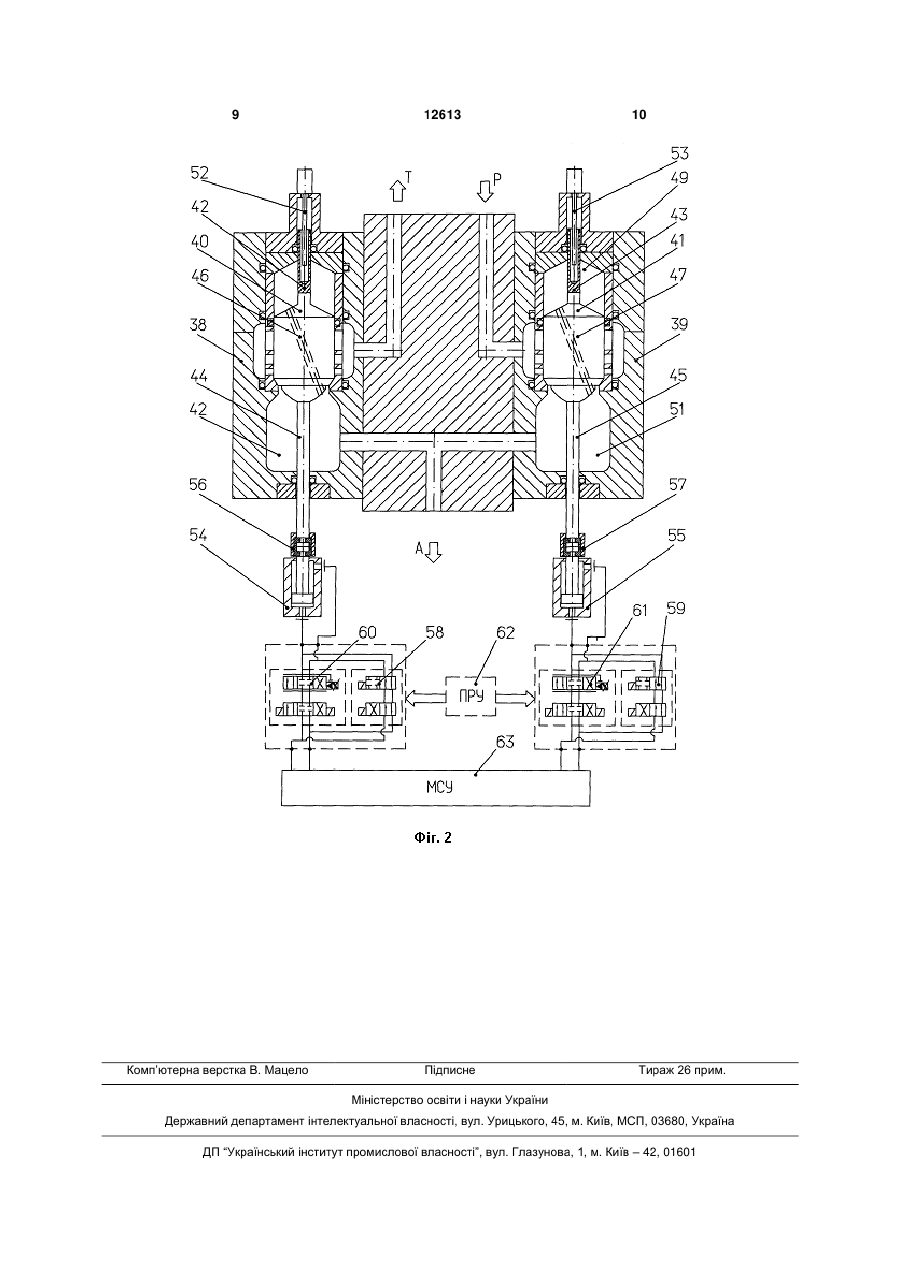
1. Система керування гідравлічним багатоциліндровим пресом, яка містить розподільники для регулювання і керування робочими, піднімальними і врівноважувальними циліндрами, зв'язаними між собою силовими і наповнювально-зливними гідролініями, оливосистему, яка відрізняється тим, що силові гідролінії робочих циліндрів виконані за двоконтурною схемою, в якій перший контур з’єднує ряд циліндрів? розташованих на подовжній осі преса, а другий - два ряди циліндрів, розташованих паралельно і симетрично подовжній осі, причому кожен контур має індивідуальне керування, включаючи гідролінії піднімальних і врівноважувальних циліндрів. U 2 (19) 1 3 12613 4 точного дозування навантаження при максимальврівноважуючих циліндрів, а розподільники оснаному КПД системи; щені адаптивними регуляторами з програмним - ефективні засоби захисту від поломки детарегулюючим пристроєм, причому, адаптивні регулей преса. лятори виконані у виді попарно взаємодіючих двоВідома також система керування гідравлічним лінійних дроселів, клапани яких виконані з верхнім багатоциліндровим пресом зусиллям 750МН, що і нижнім напрямними хвостовиками і з розвантапрацює переважно на водній емульсії, яка включає жувальним діагональним каналом, що з'єднують розподільники для регулювання і керування робонадклапанну і підклапанну порожнини, обладнані чими, піднімальними і врівноважуючими циліндрадатчиками лінійних переміщень, установленими ми, зв'язаними між собою силовими і наповнювапоза контактом з робочою рідиною, і оснащені інльно-зливними гідролініями, оливосистему, [див., дивідуально керованими сервоциліндрами, обланаприклад, книгу Білов А.Ф., Розанов Б.В., Лінц днаними незалежними взаємоблокуючими систеВ.П. «Об'ємне штампування на гідравлічних премами дискретного і сервокерування з живленням сах», М., Машинобудування, 1986, стор.48...51]. від оливосистеми. У той же час гідролінії кутових Навантаження преса здійснюється за допомоциліндрів другого контуру додатково оснащені гою 12 робочих циліндрів (по три циліндра кожної з розподільниками з адаптивними регуляторами. чотирьох секцій преса), підключених за двоконтурМіж відмітними ознаками корисної моделі і теною схемою: хнічним результатом є причинно-наслідковий зв'я- І контур, 6 циліндрів, розташованих у двох зок. крайніх секціях; Тільки завдяки тому, що силові гідролінії робо- II контур, 6 циліндрів, розташованих у двох чих циліндрів виконані за двоконтурною схемою, у середніх секціях; якої перший контур поєднує ряд циліндрів розтаПри двох джерелах живлення від окремих нашованих на подовжній осі преса, а другий-два рясосно - акумуляторних станцій, що забезпечують ди циліндрів розташованих паралельно симетричтиск 20 і 32МПа, прес має число робочих ступіно подовжньої осі, при цьому, кожен контур має ней-4. індивідуальне керування, включаючи гідролінії По сукупності істотних ознак вищезгадана сиспіднімальних і врівноважуючих циліндрів, створютема керування гідравлічним багатоциліндровим ється можливість збільшити кількість робочих ступресом є найбільш близькою до заявленої і може піней для точного дозування навантаження при бути прийнята за прототип. максимальному КПД системи. Принципова схема керування гідравлічним баА оснащенням розподільників адаптивними гатоциліндровим пресом 750МН аналогічна пресорегуляторами з програмним регулюючим пристрові 300МН, описаному вище, а тому її недоліками є єм, причому, адаптивні регулятори виконані у виді те, що вона не містить технічних засобів для запопарно взаємодіючих дволінійних дроселів, клабезпечення виконання технологічних вимог, необпани яких оснащені індивідуально керованими хідних при виробництві великогабаритних високосервоциліндрами, обладнаними незалежними взаточних штамповок, габарити яких істотно ємоблокуючими системами дискретного і сервокеперевищують габарити штампувань преса 300МН. рування з живленням від оливосистеми, створюВ основу корисної моделі покладена задача ється можливість регулювання швидкості і зусилля підвищення технологічних можливостей преса. штампування, а також забезпечення точної позиЦя задача вирішена за рахунок технічного реційної зупинки рухомої траверси. зультату, що складається в створенні схеми керуДо того ж, додаткове оснащення гідроліній кування гідравлічним багатоциліндровим пресом, тових циліндрів другого контуру розподільниками з яка дозволяє забезпечити: адаптивними регуляторами дає можливість одер- збільшення кількості робочих ступіней для жати високу точність бесперекосного силового точного дозування навантаження при максимальруху траверси; ному КПД системи; Заявлене рішення не відоме з рівня техніки, - регулювання швидкості і зусилля штампущо дає можливість зробити висновок, що воно є вання, а також забезпечення точної позиційної новим. зупинки рухомої траверси; Заявлене рішення має винахідницький рівень - високу точність бесперекосного силового рутому, що воно не випливає явно для фахівця з ху траверси; рівня техніки. Для досягнення цього технічного результату в По заявленому рішенню на AT HKM3 розробсистемі керування гідравлічним багатоциліндролене технічна пропозиція на систему керування вим пресом, що працює переважно на водній емугідравлічним багатоциліндровим пресом зусиллям льсії, яка включає розподільники для регулювання 750МН. і керування робочими, піднімальними і врівноваСуть корисної моделі пояснюється кресленняжуючими циліндрами, зв'язаними між собою силоми, де: вими і наповнювально-зливними гідролініями, на Фіг.1 показана схема системи керування гіоливосистему, силові гідролінії робочих циліндрів дравлічним багатоциліндровим пресом, (умовні виконані за двоконтурною схемою, у якої перший позначки: НАС - насосно-акумуляторна станція); контур поєднує ряд циліндрів розташованих на на Фіг.2 показаний адаптивний регулятор, подовжній осі преса, а другий - два ряди циліндрів, (умовні позначки: ПРУ - програмно-регулюючий розташованих паралельно симетрично подовжньої пристрій, МСУ - оливосистема керування, Р-підвід осі, при цьому, кожен контур має індивідуальне від НАС, Т - злив, А- підвід до споживача). керування, включаючи гідролінії піднімальних і Система керування гідравлічним багатоцилін 5 12613 6 дровим пресом (див. Фіг.1), що складається з рамРухома траверса преса 64 знаходиться в ної станини, яка містить чотири секції 1...4, у кожкрайньому верхньому положенні. Вибір потрібної ній з яких установлені по три робочих циліндра робочої ступіні (однієї з 15 можливих) здійснюєть5...16, включає силові гідролінії, що зв'язують зася за рахунок забезпечення готовності до роботи значені циліндри між собою за двоконтурною схедругого контуру 18 робочих циліндрів (або двох мою, у якої перший контур 17 поєднує циліндри контурів 17 і 18 одночасно) шляхом підключення 5...8, розташовані на поздовжній осі преса, а друробочої рідини тиском 20МПа або 32МПа, при гий контур 18 - два ряди циліндрів 9...12 і 13... 16, цьому використовують також можливості навантарозташованих паралельно симетрично поздовжній ження або розвантаження незалежно керованих осі. Усі робочі циліндри 5...16 через клапани напопіднімальних 65...68, чи врівноважуючих циліндрів внення 19...30 і наповнювально - зливальну гідро69...72. лінію 31 підключені до бака наповнення 32. Усі клапани регуляторів знаходяться в нижДля керування робочими циліндрами 5...16 ньому закритому положенні. через гідролінії контурів 17 і 18 установлено розХід наближення здійснюється при включенні подільник 33, оснащений чотирма адаптивними адаптивного регулятора 76 керування піднімальрегуляторами 34...37 (див. Фіг.2). Кожен адаптивними циліндрами 65...68. При цьому клапан 41 ний регулятор виконаний у вигляді попарно взає(див. Фіг.2) сполучає піднімальні циліндри з наповмодіючих дволінійних дроселів 38...39, клапани нювальним баком 32. 40...41 яких виконані з верхніми 42...43 і нижніми Під дією маси рухомих частин преса, а також 44...45 напрямними хвостовиками і з розвантажутиску наповнення в робочих циліндрах 5...16, травальними діагональними каналами 46...47, з'єднуверса 64 опускається до зіткнення з заготівкою, ючими надклапанні 48...49 і підклапанні 50...51 при цьому швидкість переміщення траверси контпорожнини. Регулятори обладнані датчиками ліролюється за допомогою чотирьох кутових датчинійних переміщень 52...53, установленими поза ків лінійних переміщень 88...91. контактом з робочою рідиною, і оснащені індивідуРегулювання швидкості в режимі ходу наблиально керованими сервоциліндрами 54...55, зв'яження виконується за допомогою програмного заними з нижніми 44...45 направляючими хвосторегулюючого пристрою 62, підключеного до адапвиками швидкороз'ємними з'єднаннями 56...57. тивного регулятора 76. Сервоциліндри 54...55 обладнані незалежними Робочий хід. Команда на включення робочого взаємоблокуючими системами дискретного керуходу подається від датчиків тиску, встановлених у вання 58...59 і сервокерування 60...61, підключегідролінії піднімальних циліндрів (на схемі не поканими електрично до програмного регулюючого зані). При цьому включаються в роботу багатофупристрою 62, а гідравлічно до оливосистеми63. нкціональні адаптивні регулятори 34... 37 у заданій Для виконання зворотного ходу рухомої тратехнологічній послідовності, що разом із програмверси 64 передбачено чотири піднімальних цилінним регулюючим пристроєм 62 забезпечують: дри 65...68, а також чотири врівноважуючих цилін- навантаження преса робочим зусиллям в дри 69...72, незалежно підключених через економічному режимі за рахунок оптимального гідролінії 73 і 74 до розподільника 75, оснащеного набору необхідної кількості робочих ступіней. адаптивними регуляторами 76 і 77, а також зворо- регулювання робочого зусилля в процесі тними клапанами 78...79, виконуючими функції штампування (у діапазоні не менше 1:10). запобіжних клапанів. - регулювання швидкості. Для забезпечення бесперекосного руху рухо- точна позиційна зупинка траверси преса (у мої траверси 64 гідролінії кутових циліндрів 9, 12, межах 1мм). 13 і 16 другого контуру 18 додатково оснащені Одночасно при функціонуванні адаптивних рерозподільниками 80...83 з адаптивними регулятогуляторів 80...84, підключених до кутових циліндрів рами 84...87 і датчиками лінійних переміщень 9, 12, 13 і 16, з використанням зворотних зв'язків 88...91. від датчиків 88... 91 та датчиків тиску, підключених Для аварійного захисту гідросистеми на вході до кутових циліндрів (на схемі не показані) і при розподільників 33 і 75 робочих і піднімальних циліелектричній взаємодії з програмним регулюючим ндрів, відповідно, встановлені автоматичні запірні пристроєм - забезпечується без перекосу синхклапани 92 і 93. ронне переміщення рухомої траверси 64. Система керування гідравлічним багатоцилінДекомпресія. Розвантаження робочих цилінддровим пресом забезпечує роботу преса в наступрів 5...16 з тиску 32МПа (20МПа) здійснюється за ній послідовності операцій: допомогою адаптивних регуляторів 34 або 35, при - Вихідне положення; цьому рідина скидається через наповнювально- Хід наближення; зливну гідролінію 31 в бак наповнення 32. - Робочий хід штампування; Підйом траверси у вихідне положення реалізу- Декомпресія; ється включенням адаптивних регуляторів 76 і 77, - Підйом траверси у вихідне положення. що забезпечують подачу високого тиску від НАС У вихідному положенні відкриваються автома32МПа в зворотні 65...68 і врівноважуючі циліндри тичні запірні клапани 92 і 93, відбувається подача 69...72, з можливістю регулювання швидкості руху, високого тиску від НАС 20МПа і НАС 32МПа до гальмування і позиційної зупинки рухомої траверси розподільників 33 і 75. Одночасно забезпечується 64 у верхньому заданому положенні. готовність роботи оливосистеми 63 (див. Фіг.2), Використання системи, що заявляється, для для живлення систем дискретного і сервокеруванкерування потужним багатоциліндровим гідравлічня адаптивних регуляторів 34...37 і 76, 77. ним пресом дозволяє одержати в порівнянні з про 7 12613 8 тотипом наступні переваги: тор - «чечевичність» заготівки. - Збільшити кількість робочих ступіней з 4-х до - Широкий діапазон вибору швидкісних пара15, що дозволяє знизити енергоємність процесу метрів руху траверси дозволяє поліпшити структуштампування великогабаритних деталей, при ру металу заготівки. цьому, за рахунок точного дозування зусилля - Забезпечення бесперекосного руху траверси штампування істотно знижується негативний факзначно знижує клиновидність заготівки. 9 Комп’ютерна верстка В. Мацело 12613 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of hydraulic multicylinder press
Автори англійськоюVoloshyn Oleksii Ivanovych, Hramatnyi Viktor Mykhailovych, Smorodynskyi Henrikh Yukhymovych, Trembach Yurii Mykolaiovych, Shevchenko Mykola Ivanovych, Tokarev Oleksii Zakharovych
Назва патенту російськоюСистема управления гидравлическим многоцилиндровым прессом
Автори російськоюВолошин Алексей Иванович, Граматный Виктор Михайлович, Смородинский Генрих Ефимович, Трембач Юрий Николаевич, Шевченко Николай Иванович, Токарев Алексей Захарович
МПК / Мітки
МПК: B30B 15/16
Мітки: керування, система, пресом, гідравлічним, багатоциліндровим
Код посилання
<a href="https://ua.patents.su/5-12613-sistema-keruvannya-gidravlichnim-bagatocilindrovim-presom.html" target="_blank" rel="follow" title="База патентів України">Система керування гідравлічним багатоциліндровим пресом</a>
Система керування гідравлічним пресом
Номер патенту: 46386
Опубліковано: 15.05.2002
Автори: Клименко Фелікс Констянтинович, Лопатенко Костянтин Петрович, Михайловський Миколай Володимирович, Кукушкін Олег Миколайович, Іоффе Анатолій Моісейович, Ничаєв Віктор Іванович, Мазур Ігор Анатолійович, Цапко Валерій Констянтинович
МПК: B30B 15/16
Мітки: гідравлічним, пресом, система, керування
Формула / Реферат:
Система керування гідравлічним пресом, що містить джерело тиску, з'єднане через клапани з робочим і піднімальними циліндрами преса, наповнювальний бак, з'єднаний із пневмосіттю, наповнювальний клапан із сервоприводом, гідравлічне гальмо з пневморозподільником, пристрій для точної зупинки рухливої траверси з пневморозподільником, який відрізняється тим, що клапани робочого і піднімальних циліндрів виконані у вигляді двопозиційних...
Система керування гідравлічним кувальним пресом
Номер патенту: 5560
Опубліковано: 15.03.2005
Автори: Трембач Юрій Миколайович, Смородинський Генріх Юхимович, Волошин Олексій Іванович, Граматний Віктор Михайлович, Шевченко Микола Іванович
МПК: B30B 15/16
Мітки: пресом, кувальним, керування, гідравлічним, система
Формула / Реферат:
Система керування гідравлічним кувальним пресом, що включає розподільну апаратуру, яка зв'язує робочі і зворотні циліндри з джерелом високого тиску і наповнюючі клапани із сервоциліндрами, що з'єднують робочі циліндри з джерелом низького тиску, при цьому розподільна апаратура виконана з двома індивідуально керованими двоклапанними розподільниками вибору ступеня зусилля і розподільником вибору режиму, причому розподільники вибору ступеня...
Система керування гідравлічним інерційним вібропресом
Номер патенту: 7185
Опубліковано: 15.06.2005
Автори: Човнюк Юрій Васильович, Пентюк Борис Миколайович, Назаренко Іван Іванович
МПК: B21J 9/00
Мітки: вібропресом, керування, система, гідравлічним, інерційним
Формула / Реферат:
Система керування гідравлічним інерційним вібропресом, що містить робочий циліндр, плунжер якого закріплений до робочого столу, верхній привідний циліндр, з'єднаний з пружнозв'язаними траверсами, розподільний пристрій, встановлений в напірній магістралі, і зливну магістраль, який відрізняється тим, що розподільний пристрій виконано у вигляді чотириходового двопозиційного золотникового розподілювача, який окремим каналом з'єднаний з верхнім...
Гідросистема управління пресом для пресування сипучих сумішей
Номер патенту: 53237
Опубліковано: 15.01.2003
Автори: Наняк Олег Михайлович, Газдайка Богдан Петрович, Бек Юрій Маркіянович, Вагула Роман Григорович
МПК: B30B 15/00, B28B 3/00
Мітки: управління, пресування, сипучих, сумішей, гідросистема, пресом
Формула / Реферат:
Гідросистема управління пресом для пресування сипучих сумішей з плунжерним циліндром пресування, що обладнана клапаном наповнення, акумулятором, мультиплікатором-демультиплікатором і циліндрами швидкого пересування штампів, з'єднаних підвідними і зливними магістралями з гідроприводом, яка відрізняється тим, що вона виконана з гідравлічним блоком, який обладнаний двома трипозиційними і п'ятьма двопозиційними золотниковими розподільниками, які...
Компресор з гідравлічним приводом
Номер патенту: 9736
Опубліковано: 17.10.2005
Автори: Петрусь Віталій Володимирович, Насіковський Андрій Броніславович, Ніколайчук Ірина Іванівна, Коц Іван Васильович
МПК: F04B 35/00
Мітки: гідравлічним, приводом, компресор
Формула / Реферат:
Компресор з гідравлічним приводом, який містить корпус з опозитно розташованими в ньому двома диференційними поршнями і насос, який відрізняється тим, що перший диференційний поршень, який утворює спільно з корпусом дві газові камери, що мають зв'язок із блоком всмоктуючих та нагнітальних клапанів, механічно зв'язаний з другим диференційним поршнем, який із однієї сторони утворює спільно з корпусом робочу камеру, що гідравлічно сполучена із...