Трикоординатна рлс
Номер патенту: 15200
Опубліковано: 30.06.1997
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович, Хом'яков Олег Миколайович
Формула / Реферат
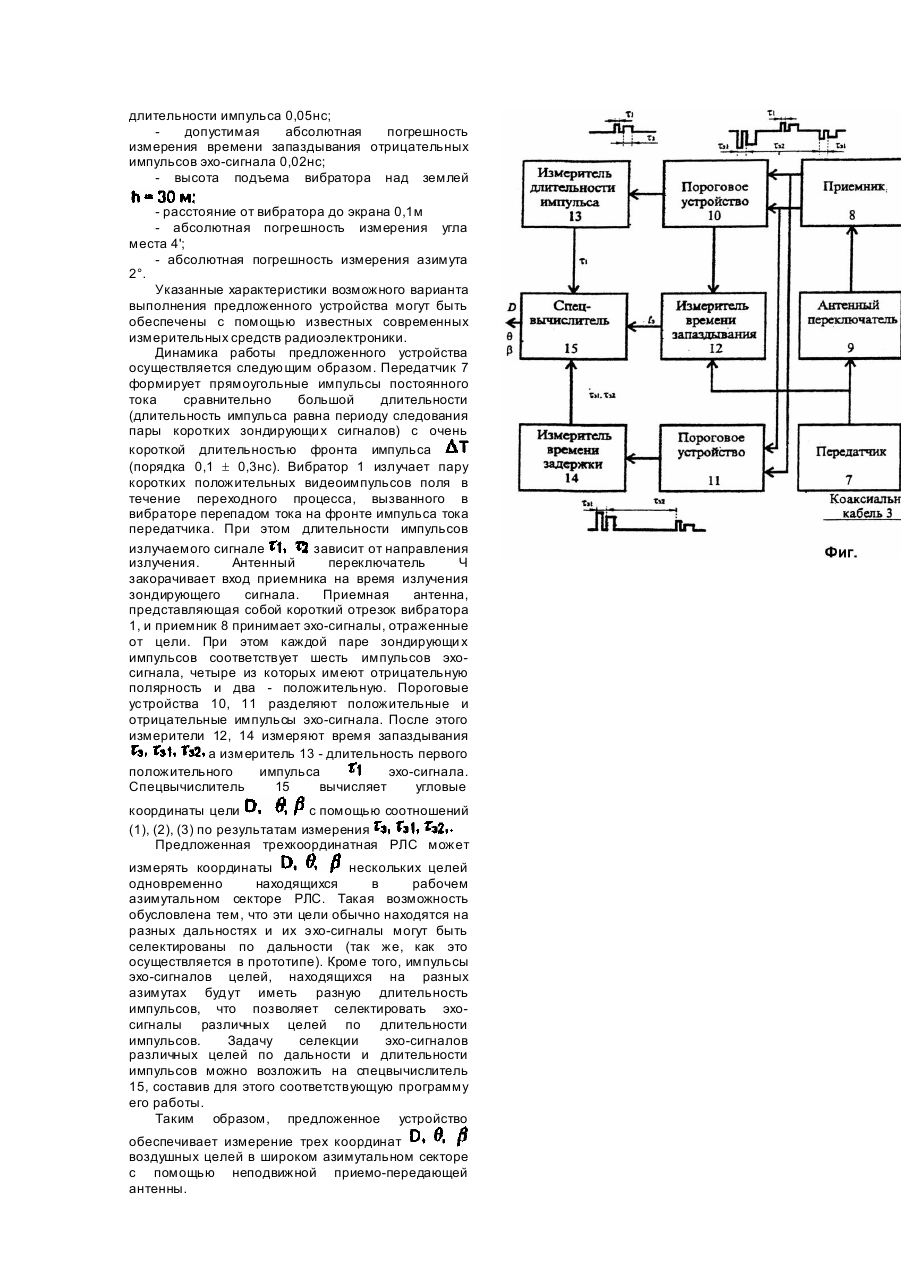
Трехкоординатная РЛС, содержащая приемо-передающую антенну, антенный переключатель, импульсный передатчик, приемник и измеритель времени запаздывания импульса эхо-сигнала относительно зондирующего импульса, отличающаяся тем, что передатчик и приемник выполнены для передачи и приема несинусоидальных сигналов в виде импульсов очень короткой длительности, приемо-передающая антенна выполнена в виде горизонтального вибратора, длина которого значительно больше произведения скорости света на длительность фронта импульса тока, концы вибратора связаны с передатчиком двумя коаксиальными кабелями, один из которых длиннее другого на две длины вибратора, небольшой отрезок в середине вибратора длиной не более через антенный переключатель связан с приемником двумя коаксиальными кабелями, позади вибратора установлен экран из поглощающего материала, на выходе приемника установлены два пороговых устройства, подключенных параллельное инверсией полярности к выходу приемника и разделяющих положительные и отрицательные импульсы принимаемых сигналов, первое пороговое устройство, выделяющее два положительных импульса эхо-сигнала, связано с измерителем длительности первого положительного импульса, а также связано с измерителем времени запаздывания этого импульса относительно положительного зондирующего импульса излученного относительно положительного зондирующего импульса излученного сигнала, второе пороговое устройство, выделяющее четыре отрицательных импульса принимаемых сигналов, связано с измерителем времени задержки второго и третьего отрицательных импульсов относительно первого соответственно, на выходе устройства установлен спецвычислитель, вычисляющий угол места и азимутальный угол цели по результатам измерения с помощью соотношений
где - высота подъема вибратора над землей.
Текст
Изобретение относится к области радиолокации и может быть использовано для измерения дальности, азимута и угла места воздушных целей в наземных радиолокаторах, использующи х сверхширокополосные несинусоидальные сигналы в виде видеоимпульсов очень короткой длительности (несколько нс и менее). Известна трехмерная радиолокационная система, используемая для измерения дальности, азимута и угла места воздушных целей [1]. В этой системе используется антенна с частотным сканированием по углу места, которая вращается по азимуту в горизонтальной плоскости. Антенна имеет узкую диаграмму направленности. Система использует сигналы в виде радиоимпульсов с внутриимпульсной частотной модуляцией. В системе предусмотрена возможность изменять полосу частот, используемую для частотного сканирования, и среднюю несущую частоту сигнала, что обеспечивает защиту от узкополосных радиопомех. Недостатком этого аналога является то, что для обеспечения высокой направленности необходимо использовать антенну больших размеров по сравнению с длиной волны. Другой недостаток состоит в том, что антенну необходимо вращать по азимуту. В качестве прототипа выбрана РЛС определения высоты с качающейся диаграммой направленности [2]. Эта РЛС позволяет измерять дальность и угол места и по этим данным определять высоту полета воздушной цели. Измерение угла места осуществляется путем качания (вращения) в вертикальной плоскости приемо-передающей антенны с узкой по углу места диаграммой направленности. Поиск цели обычно осуществляют путем вращения антенны по азимуту в горизонтальной плоскости. РЛС излучает сигнал в виде периодической последовательности радиоимпульсов. Для определения дальности цели измеряют время запаздывания импульса эхосигнала относительно зондирующего импульса передатчика. При этом дальность находят как произведение скорости света с на половину времени запаздывания В состав прототипа входят приемо-передающая антенна (например, зеркальная антенна), качаемая по углу места и вращаемая по азимуту, передатчик, формирующий зондирующие сигналы в виде периодической последовательности радиоимпульсов, приемник, антенный переключатель, переключающий антенну с передачи на прием, и индикатор дальность - высота (или дальность - угол места). Разумеется, что в состав прототипа входят также измеритель времени запаздывания импульса эхо-сигнала относительно зондирующего импульса передатчика, электродвигатели качания и вращения антенны, а также датчики, указывающие текущее угломестное и азимутальное положение антенны. Основное назначение прототипа - измерение высоты цели. Поэтому он обычно придается к обзорной двухкоординатной РЛС обнаружения, измеряющей азимут и дальность, и получает целеуказания от оператора обзорной РЛС. Однако прототип может использоваться также самостоятельно и позволяет измерять три координаты цели, хотя скорость измерения координат при этом будет меньше, чем в комплексе с обзорной РЛС. Примером технического выполнения прототипа является, например, серийная РЛС типа S600 производства США. Недостатком прототипа является то, что для осуществления прототипа необходима антенна с высокой направленностью, то есть требуется большая антенна, размеры которой значительно больше длины волны. Другой недостаток состоит в том, что необходимо качать антенну прототипа по углу места и вращать по азимуту, что тр удно технически осуществить при больших размерах антенны. В основу изобретения поставлена задача создать такую трехкоординатную РЛС, в которой новое исполнение неподвижной слабонаправленной антенны, позволяет обеспечить измерение трех координат воздушной цели в азимутальном секторе порядка 160° с высокой точностью. Поставленная задача решается тем, что в устройстве прототипе, содержащем приемопередающую антенну, антенный переключатель, импульсный передатчик, приемник и измеритель времени запаздывания импульса эхосигнала относительно зондирующего импульса, предусмотрены следующие отличия: передатчик и приемник выполнены для передачи и приема несинусоидальных сигналов в виде видеоимпульсов очень короткой длительности (несколько нс и менее), приемо-передающая антенна выполнена в виде горизонтального проволочного вибратора, длина которого значительно больше произведения скорости света с на длительность фронта импульса тока, концы вибратора связаны с передатчиком двумя коаксиальными кабелями, один из которых длиннее другого на две длины вибратора, небольшой отрезок в середине вибратора длиной не более с через антенный переключатель связан с приемником двумя одинаковыми коаксиальными кабелями, позади вибратора установлен экран из поглощающего радиоволны материала, на выходе приемника установлены два пороговых устройства, подключенных параллельно с инверсией полярности к выходу приемника и разделяющих положительные и отрицательные импульсы принимаемых сигналов, первое пороговое устройство, выделяющее два положительных импульса эхо-сигнала, связано с измерителем длительности первого положительного импульса, а также связано с измерителем времени запаздывания этого импульса относительно положительного зондирующего импульса излучаемого сигнала, второе пороговое устройство, выделяющее четыре отрицательных импульса эхосигнала, связано с измерителем времени задержки второго и третьего отрицательных импульсов относительно первого соответственно, на выходе устройства установлен спецвычислитель, вычисляющий угол места и азимутальный угол радиолокационной цели по результатам измерения с помощью соотношений где - высота подъема вибратора над землей. При этом дальность цели так же как и в прототипе, определяют по соотношению (1). Предложенное устройство обеспечивает измерение трех координат воздушной цели в передней полусфере в азимутальном секторе порядка 160° при неподвижной антенне, то есть качать антенну по углу места и вращать по азимуту не требуется и из состава прототипа исключены электродвигатели качания и вращения антенны и датчики, указывающие угловое положение антенны в пространстве. Антенный переключатель предложенного устройства отличается от антенного переключателя прототипа тем, что в предложенном устройстве этот переключатель не переключает антенну от передатчика к приемнику (как в прототипе), а только отключает (или закорачивает) вход приемника от антенны на время излучения зондирующего сигнала. Предложенная РЛС использует радиоволны горизонтальной поляризации. Передатчик и приемник прототипа заменены на передатчик и приемник, пригодные для передачи и приема сверхширокополосных несинусоидальных импульсных сигналов очень короткой длительности (несколько нс и менее). Технология и принципы построения таких передатчиков и приемников известны и описаны в литературе [3]. Такой передатчик представляет собой, например, генератор тока в виде прямоугольных видеоимпульсов сравнительно большой длительности (длительность импульса тока передатчика равна периоду следования коротких зондирующи х импульсов излучаемого сигнала) с очень короткой длительностью фронта импульса порядка 0,1 ¸ 0,3нс). Внутреннее сопротивление такого генератора тока требуется согласовать с волновым сопротивлением фидерной линии. Техническая сущность и принцип действия предложенного устройства поясняются чертежом, где представлена упрощенная структурная схема предложенной трехкоординатной РЛС, схематически показаны конструкция приемопередающей антенны, воздушная цель, земная поверхность и лучи радиоволн от антенны к цели, а также показана форма импульсных сигналов в различных трактах схемы. В состав предложенного устройства входят следующие элементы: проволочный горизонтальный вибратор 1, длина которого плоский экран из поглощающего материала 2, экранирующий излучение радиоволн и заднюю полусферу пространства; коаксиальные кабели 3, 4 связывающие концы вибратора 1 с передатчиком, (кабель 4 длиннее кабеля 3 на две длины вибратора два одинаковых коаксиальных кабеля 5, 6, связывающих антенный переключатель с небольшим отрезком длиной в середине вибратора 1; передатчик 7; приемник 8; антенный переключатель 9, отключающий (или закорачивающий) вход приемника 8 на время передачи зондирующего сигнала; два пороговых устройства 10, 11, разделяющих положительные и отрицательные импульсы эхо-сигнала и пропускающие сигнал на выход, когда уровень сигнала превысит заданный порог, (эти пороговые устройства подключены параллельно к выходу приемника 8 с инверсией полярности их входов); измеритель 12 времени запаздывания положительного импульса эхо-сигнала относительно зондирующего импульса излучаемого сигнала; измеритель 13 длительности первого положительного импульса эхо-сигнала; измеритель 14 времени задержки второго и третьего отрицательных импульсов эхо-сигнала относительно первого; и спецвычислитель 15, вычисляющий дальность угол места и азимут цели с помощью соотношений (1), (2), (3) по измеренным значениям и известным параметрам с Наружные металлические оболочки коаксиальных кабелей 3, 4, 5, 6 экранируют излучение токов, текущи х по внутренним жилам этих кабелей, не являются токонесущими сигнал элементами и могут быть заземлены. Принцип действия предложенного устройства поясняется следующим. Радиоволны от антенны РЛС до цели и обратно распространяются четырьмя путями: антенна - цель - антенна (длина пути пути антенна - цель - земля - антенна (длина антенна - земля - цель - антенна (длина пути антенна - земля - цель земля - антенна (длина пути При каждом отражении (от земли или от цели) импульс поля радиоволны изменяет свою полярность в силу известного принципа изменения полярности [3]. Полярность импульса поля радиоволн, излучаемых антенной условно назовем и будем считать положительной. При этом импульсы эхо-сигнала первой волны (длина пути и импульсы четвертой волны (длина пути будут иметь отрицательную полярность, а импульсы эхо-сигналов второй и третьей волны (длина пути у обеих волн) имеют положительную полярность. Вторая и третья радиоволны проходят пути одинаковой длины и эхо-сигналы этих волн имеют одинаковую положительную полярность. При приеме импульсы второй и третьей волны сливаются и образуют импульс положительной полярности. Таким образом, если антенна РЛС излучит один положительный импульс радиоволны, то эхосигнал будет содержать три импульса, один из которых положителен и два отрицательны. Положительный и отрицательные импульсы эхосигнала можно разделить на выходе приемника с помощью двух пороговых устройств 10, 11, подключенных к выходу приемника как показано на чертеже. После этого можно измерить время задержки относительно друг друга двух отрицательных импульсов прямой и дважды отраженной от земли волн с помощью измерителя времени задержки 14. Это время задержки содержит информацию об угле места цели определяется соотношением и от правого конца вибратора (точки подключения кабеля 3) к левому. Производная в (6) на участке фронта импульса тока приближенно равна где - длина луча прямой волны антенна - цель; - длина луча отраженной от земли волны антенна - земля - цель. Из геометрии лучей на чертеже (фиг.) следует, что где - высота подъема вибратора над землей. Подставляя (5) в (4) и находя отсюда угол места получим формулу, аналогичную формуле (2), в которой заменено на (смысл будет пояснен позднее). Измерение азимутального угла цели основано на специальном свойстве длинного вибратора, излучающего несинусоидальный импульсный сигнал. Это свойство заключается в том, что длительность излучаемого импульса поля будет зависеть от направления излучения. Этим свойством обладает только длинный передающий вибратор, длина которого а короткий приемный вибратор длиной представляющий собой небольшую часть длинного вибратора, таким свойством не обладает. Ниже приводится доказательство наличия указанного свойства у вибратора длиной Известно, что напряженность электрического поля излучения элемента вибратора в дальней зоне пропорциональна производной по времени от тока текущего по этому элементу, и определяется выражением [3] где - волновое сопротивление свободного пространства; - длина элемента вибратора; - дальность от элемента до точки наблюдения; -скорость света; -время; -ток в элементе вибратора; - угол между осью вибратора и направлением излучения. Передатчик 7 формирует прямоугольные импульсы постоянного тока сравнительно большой длительности. Производная от такого тока всюду равна нулю за исключением очень короткого (порядка 0,1нс и менее) времени длительности фронта импульса Вибратор 1 будет излуча ть радиоволны только в течение переходного процесса в нем, вызванного перепадом тока на фронте импульса тока питающего вибратор передатчика. Ток в вибратор поступает с правого и левого концов. Во время переходного процесса вдоль вибратора навстречу друг др угу будут распространяться две волны тока со скоростью, близкой к скорости света. Направление тока этих волн в вибраторе одинаково, а направления распространения противоположны. Рассмотрим сначала первую волну тока, распространяющуюся где - амплитуда импульса тока; длительность фронта импульса. При излучении от первой волны тока в направлении нормали к вибратору поле в удаленной точке наблюдения в какой либо текущий момент времени будет создаваться излучением участка вибратора длиной которая значительно меньше длины вибратора а длительность излучаемого импульса поля первой волны тока в этом направлении будет где - время распространения волны тока вдоль вибратора. В ходе переходного процесса излучающий участок будет перемещаться вдоль вибратора. При излучении от первой волны тока под какимлибо иным углом поле в удаленной точке наблюдения в какой-либо текущий момент времени будет создаваться участком вибратора длиной а длительность импульса излучаемого сигнала первой волны тока будет где - угол между осью вибратора и направлением излучения. Следует иметь в виду, что излучающий участок вибратора не может быть больше длины вибратора Для второй волны тока процесс будет аналогичен, но она будет распространяться навстречу первой, поэтому в выражениях (10), (11) для второй волны следует заметить угол на Таким образом, при переходном процессе в вибраторе, вызванном перепадом тока на фронте импульса передатчика, длинный вибратор будет излучать два импульса тока, отличающихся по амплитуде и длительности. Из (11) следует, что длительности импульсов сигналов, излучаемых первой и второй волнами тока в длинном вибраторе зависят от угла т.е. от направления излучения и изменяются от при (или для второй волны) до при (или Для короткого вибратора первое слагаемое в (11) будет значительно меньше и указанное свойство исчезает. Если бы кабели 3, 4 от передатчика 7 к концам вибратора 1 имели одинаковую длину, то первая и вторая волны тока начали бы поступать в вибратор одновременно и излучаемые импульсы поля наложились бы друг на друга во времени. Это затруднило бы разделение соответствующи х импульсов эхо сигнала и измерение их параметров. Для устранения этого недостатка предлагается задержать волну тока относительно первой на время Это осуществляется благодаря тому, что длина кабеля 4 выбрана больше на чем у кабеля 3. Таким образом в предложенном устройстве один перепад тока на фронте импульса передатчика приводит к излучению двух импульсов поля длительностью что в свою очередь приводит к появлению в эхо-сигнале шести импульсов, два из которых положительны и четыре отрицательны (см. чертеже). Для измерения угла места необходимо замерить время задержки отрицательного импульса дважды отраженной от земли волны относительно отрицательного импульса прямой волны. Это время будет где - время запаздывания второго и третьего отрицательных импульсов эхо-сигнала относительно первого. Для определения азимута цели достаточно измерить длительность (или положительного импульса эхо-сигнала. Из геометрии лучей на чертеже следует, что угол между осью вибратора и направлением на цель связан с угловыми координатами цели следующим соотношением Подставляя (2) в (12) и (12) в (11) и находя из полученного выражения азимутальный угол получим формулу (3) для расчета этого угла по измеренным значениям и Таким образом, предложенное устройство позволяет определять три координаты цели с помощью неподвижной слабо направленной антенны и выполняет поставленную в изобретении задачу. Горизонтальная поляризация радиоволн, используемых в предложенной РЛС, выбрана потому, что при горизонтальной поляризации интенсивность отраженных от земли радиоволн будет вы ше, чем при вертикальной. Использование последней нежелательно также потому, что при больших угла х скольжения будет нарушаться принцип изменения полярности отраженных от земли сигналов, что приведет к срыву работы устройства. Использование длинного вибратора для излучения сигналов принципиально необходимо по объясненным выше причинам, а использование короткой части вибратора при приеме сигналов требуется для того, чтобы приемная антенна не влияла на длительность принимаемых сигналов, в противном случае работа устройства была бы не возможна. Центры приемного и передающего вибраторов обязательно должны быть совмещены, так как в противном случае эхо-сигнал содержал бы более шести импульсов, что привело бы к срыву работы устройства. Экран из поглощающего материала необходим для обеспечения однозначности определения азимута Этот экран нельзя выполнить из металла, так как отраженные от экрана сигналы мешали бы работе устройства. Пороговые устройства 10, 11 и особенность их подключения к приемнику необходимы для обеспечения требуемого для работы устройства разделения положительных и отрицательных импульсов эхо-сигналов. Таким образом, отмеченные выше отличительные признаки являются существенными и принципиально необходимы для осуществления предложенного устройства. Перечисленные выше элементы предложенного устройства на чертеже выполнены следующим образом. Вибратор 1 выполнен из тонкого медного провода длиной Плоский экран 2 выполнен из широкополосного поглощающего радиоволны материала. Такие материалы известны и широко применяются в радиотехнике. Размер экрана 2 значительно больше длины вибратора 1. Коаксиальные кабели 3, 4, 5, 6 имеют обычную известную конструкцию. Длина кабеля 3 короче кабеля 4 на две длины вибратора, а кабели 5, 6 имеют одинаковую длину. Наружные металлические оболочки коаксиальных кабелей заземлены. Антенный переключатель 9 закорачивает (или отключает от антенны) вход приемника на время излучения зондирующего импульса и имеет известную конструкцию. Передатчик 7 и приемник 8 выполнены для передачи и приема несинусоидальных импульсных сигналов по известной технологии [3]. Пороговые устройства 10, 11 имеют известную конструкцию. Они пропускают сигнал на выход, когда уровень сигнала превысит заданный порог, который целесообразно установить на уровне шумов приемника. Пороговое устройство можно выполнить, например, в виде широкополосного диода, закрытого небольшим постоянным напряжением. Измеритель длительности импульса 13 и измеритель времени задержки 14 имеют известную конструкцию, обеспечивающую измерение очень малых интервалов времени (менее 1 не). Измеритель времени запаздывания 12 не отличается от соответствующего устройства прототипа. Спецвычислитель 15 представляет собой обычную микро-ЭВМ, выполняющую вычисления трех координат цели с помощью соотношений (1), (2), (3) по измеренным значениям известным параметрам Для доказательства возможности осуществления предложенной РЛС ниже приводятся рассчитанные авторами параметры возможного варианта выполнения устройства: длительность фронта импульса тока передатчика - длина вибратора длина приемного отрезка вибратора - интервал изменения длительности импульсов зондирующи х сигнала 0,115 ¸ 2,1нс; - размер экрана из поглощающего материала 1,5 ´ 1м; - рабочий азимутальный сектор - рабочий угломестный сектор допустимая абсолютная погрешность измерения длительности импульса 0,05нс; допустимая абсолютная погрешность измерения времени запаздывания отрицательных импульсов эхо-сигнала 0,02нс; - высота подъема вибратора над землей - расстояние от вибратора до экрана 0,1м - абсолютная погрешность измерения угла места 4'; - абсолютная погрешность измерения азимута 2°. Указанные характеристики возможного варианта выполнения предложенного устройства могут быть обеспечены с помощью известных современных измерительных средств радиоэлектроники. Динамика работы предложенного устройства осуществляется следующим образом. Передатчик 7 формирует прямоугольные импульсы постоянного тока сравнительно большой длительности (длительность импульса равна периоду следования пары коротких зондирующи х сигналов) с очень короткой длительностью фронта импульса (порядка 0,1 ± 0,3нс). Вибратор 1 излучает пару коротких положительных видеоимпульсов поля в течение переходного процесса, вызванного в вибраторе перепадом тока на фронте импульса тока передатчика. При этом длительности импульсов излучаемого сигнале зависит от направления излучения. Антенный переключатель Ч закорачивает вход приемника на время излучения зондирующего сигнала. Приемная антенна, представляющая собой короткий отрезок вибратора 1, и приемник 8 принимает эхо-сигналы, отраженные от цели. При этом каждой паре зондирующи х импульсов соответствует шесть импульсов эхосигнала, четыре из которых имеют отрицательную полярность и два - положительную. Пороговые устройства 10, 11 разделяют положительные и отрицательные импульсы эхо-сигнала. После этого измерители 12, 14 измеряют время запаздывания а измеритель 13 - длительность первого положительного импульса эхо-сигнала. Спецвычислитель 15 вычисляет угловые координаты цели с помощью соотношений (1), (2), (3) по результатам измерения Предложенная трехкоординатная РЛС может измерять координаты нескольких целей одновременно находящихся в рабочем азимутальном секторе РЛС. Такая возможность обусловлена тем, что эти цели обычно находятся на разных дальностях и их эхо-сигналы могут быть селектированы по дальности (так же, как это осуществляется в прототипе). Кроме того, импульсы эхо-сигналов целей, находящихся на разных азимутах будут иметь разную длительность импульсов, что позволяет селектировать эхосигналы различных целей по длительности импульсов. Задачу селекции эхо-сигналов различных целей по дальности и длительности импульсов можно возложить на спецвычислитель 15, составив для этого соответствующую программу его работы. Таким образом, предложенное устройство обеспечивает измерение трех координат воздушных целей в широком азимутальном секторе с помощью неподвижной приемо-передающей антенны.
ДивитисяДодаткова інформація
Назва патенту англійськоюThree-coordinate radar station
Автори англійськоюZhukov Serhii Anatoliiovych, Bakhvalov Borys Mykolaiovych, Rodin Oleksandr Valeriiovych, Khomiakov Oleh Mykolaiovych
Назва патенту російськоюТрехкоординатная рлс
Автори російськоюЖуков Сергей Анатольевич, Бахвалов Борис Николаевич, Родин Александр Валериевич, Хомяков Олег Николаевич
МПК / Мітки
МПК: G01S 17/06
Мітки: рлс, трикоординатна
Код посилання
<a href="https://ua.patents.su/5-15200-trikoordinatna-rls.html" target="_blank" rel="follow" title="База патентів України">Трикоординатна рлс</a>
Спосіб вимірювання азимуту повітряних цілей
Номер патенту: 13423
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: повітряних, азимуту, вимірювання, спосіб, цілей
Формула / Реферат:
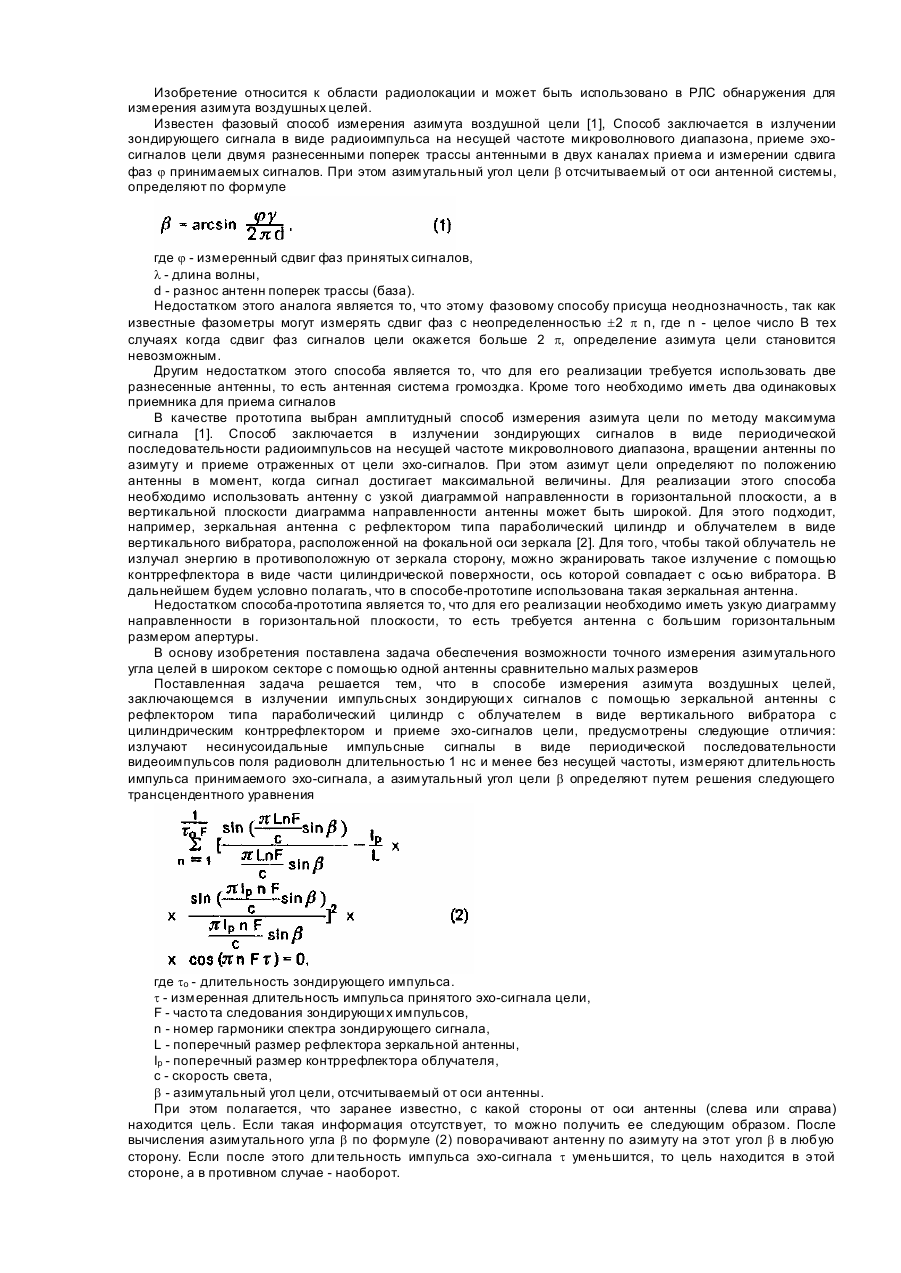
Способ измерения азимута воздушных целей, заключающийся в излучении импульсных зондирующих сигналов с помощью зеркальной антенны с рефлектором типа параболический цилиндр с облучателем в виде вертикального вибратора с цилиндрическим контррефлектором и приеме эхо-сигналов цели, отличающийся тем, что излучают несинусоидальные импульсные сигналы в виде периодической последовательности видеоимпульсов поля радиоволн длительностью 0,1-1 не без...
Радіолокаційний імпульсний дальномір

Номер патенту: 17451
Опубліковано: 06.05.1997
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: радіолокаційний, дальномір, імпульсний
Формула / Реферат:
Радиолокационный импульсный дальномер, содержащий передатчик импульсных зондирующих сигналов с периодом следования T1 > 2rm/c, приемо-передающую антенну с антенным переключателем, приемник, синхронизатор и индикатор, отличающийся тем, что антенна, приемник и передатчик выполнены для несинусоидальных импульсных сигналов наносекундной длительности t без несущей частоты в виде периодической пачки n таких импульсов с периодом T1 и периодом...
Спосіб вимірювання кутових координат цілі
Номер патенту: 13420
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: цілі, вимірювання, кутових, координат, спосіб
Формула / Реферат:
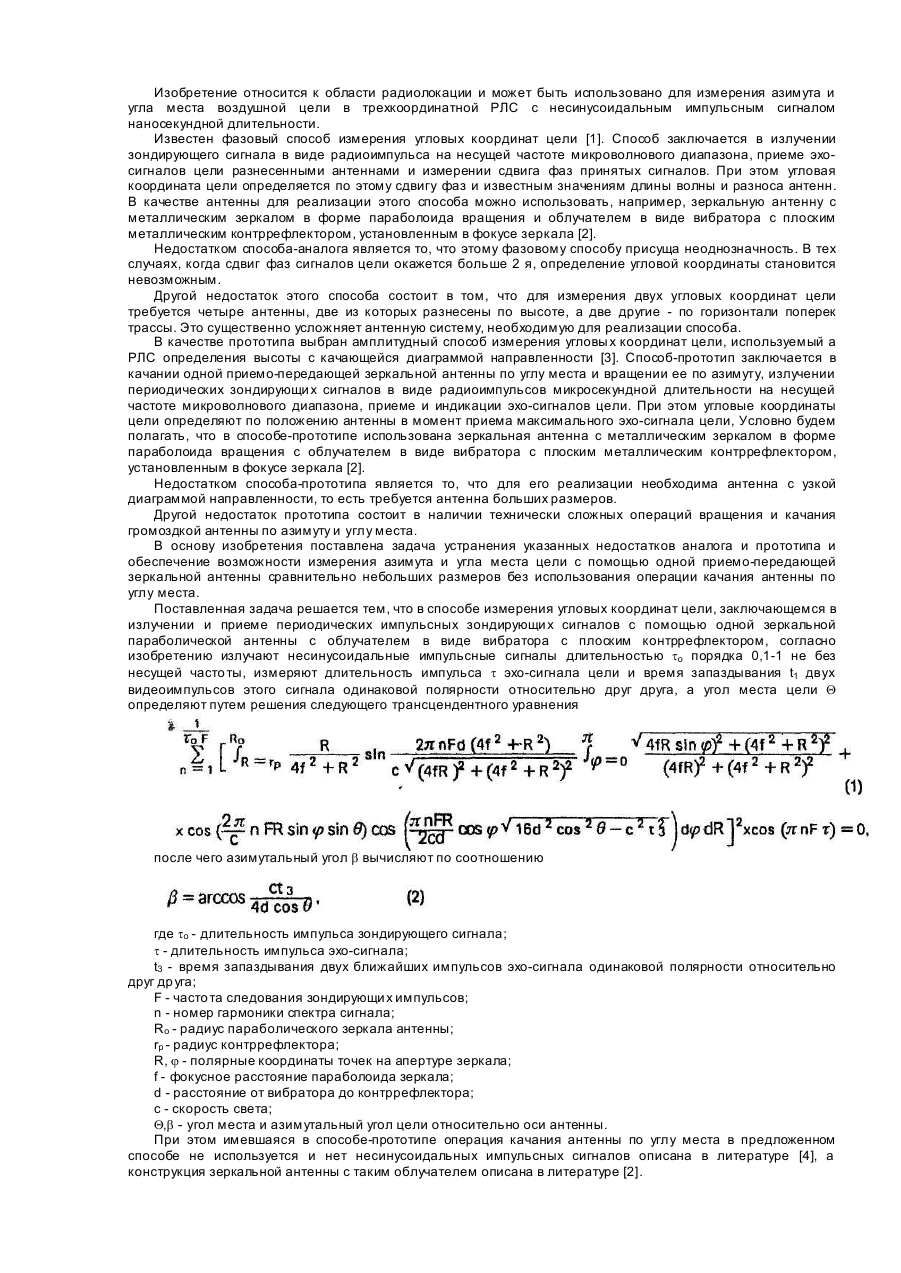
Способ измерения угловых координат цели, заключающийся в излучении и приеме периодических импульсных зондирующих сигналов с помощью одной зеркальной параболической антенны с облучателем в виде вибратора с плоским контррефлектором, отличающийся тем, что излучают несинусоидальные импульсные сигналы длительностью t0 порядка 0,1-1 нс без несущей частоты, измеряют длительность импульса t эхо-сигнала цели и время запаздывания t3 двух...
Вібраторна антенна решітка для прийому несинусоідальних сигналів
Номер патенту: 15478
Опубліковано: 30.06.1997
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: сигналів, несинусоідальних, антенна, вібраторна, решітка, прийому
Формула / Реферат:
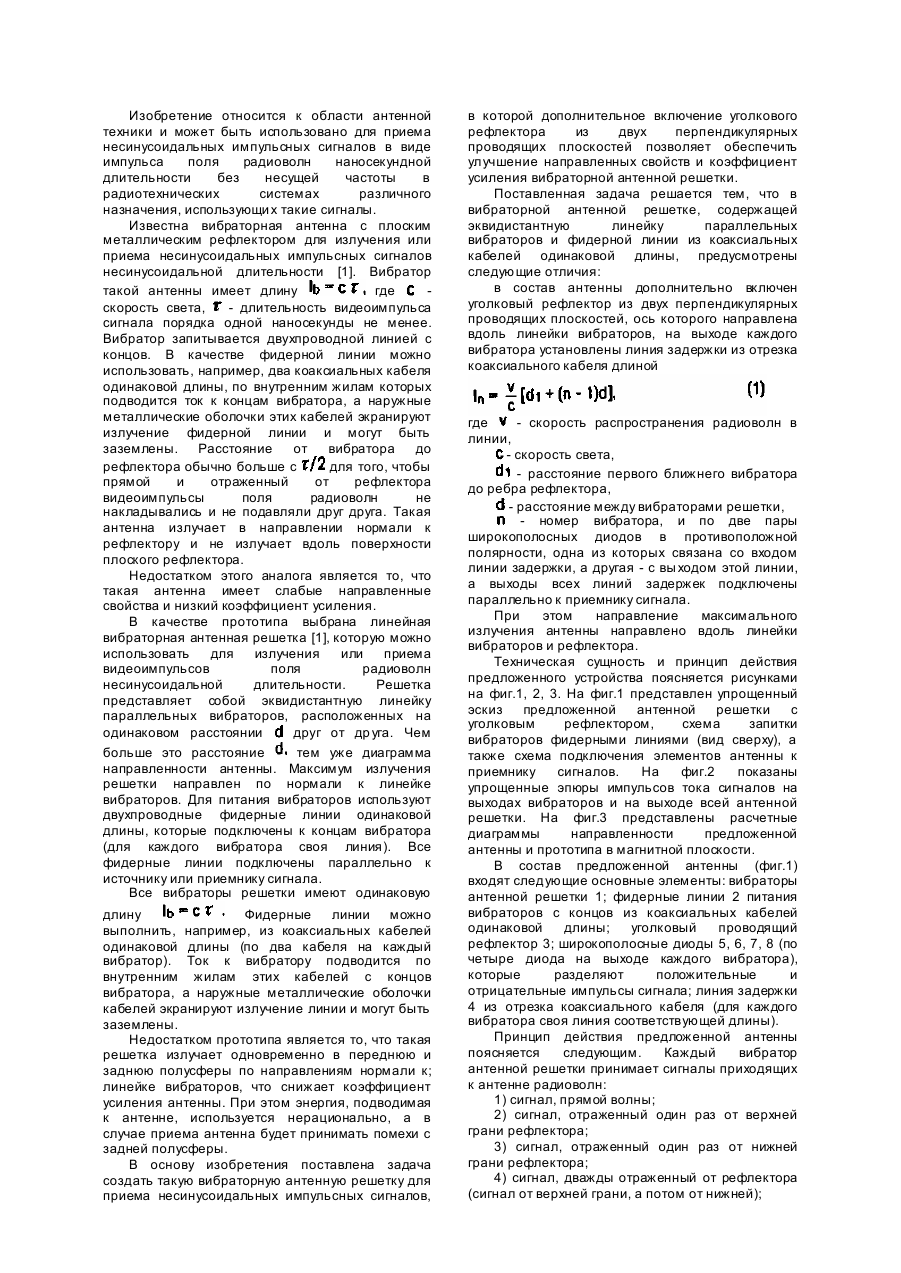
Вибраторная антенная решетка для приема несинусоидальных импульсных сигналов, содержащая эквидистантную линейку параллельных вибраторов и фидерные линии питания вибраторов из коаксиальных кабелей одинаковой длины, отличающаяся тем, что в состав антенны дополнительно включен уголковый рефлектор из двух перпендикулярных проводящих плоскостей, ось которого направлена вдоль линейки вибраторов, на выходе каждого вибратора установлены линия...
Секвентний радіолокатор для виявлення маловисотної цілі
Номер патенту: 17461
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: маловисотної, секвентний, цілі, виявлення, радіолокатор
Формула / Реферат:
Секвентный радиолокатор для обнаружения маловысотной цели, содержащий передатчик видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты, приемо-передающую антенну с антенным переключателем, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включен наземный пеленгатор бортового источника радиоизлучения цели по углу места q со своей антенной системой, на выходе приемника радиолокатора...
Попередній патент: Hесиметричhий вертикальhий вібратор
Наступний патент: Комплексна добавка для бетонної суміші
Випадковий патент: Спосіб визначення відносної діелектричної проникності, питомої провідності, тангенса кута діелектричних втрат електроізоляційних рідин