Спосіб вимірювання азимуту повітряних цілей
Номер патенту: 13423
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
Формула / Реферат
Способ измерения азимута воздушных целей, заключающийся в излучении импульсных зондирующих сигналов с помощью зеркальной антенны с рефлектором типа параболический цилиндр с облучателем в виде вертикального вибратора с цилиндрическим контррефлектором и приеме эхо-сигналов цели, отличающийся тем, что излучают несинусоидальные импульсные сигналы в виде периодической последовательности видеоимпульсов поля радиоволн длительностью 0,1-1 не без несущей частоты, измеряют длительность импульса принимаемого эхо-сигнала, а азимутальный угол цели р определяют путем расширения следующего трансцендентного уравнения
где tо - длительность зондирующего импульса,
t - измеренная длительность импульса принятого эхо-сигнала цели,
F - частота следования зондирующих импульсов,
n - номер гармоники спектра зондирующего сигнала.
L - поперечный размер рефлектора зеркальной антенны,
lp - поперечный размер контррефлектора облучателя,
с - скорость света,
b - азимутальный угол цели, отсчитываемый от оси антенны.
Текст
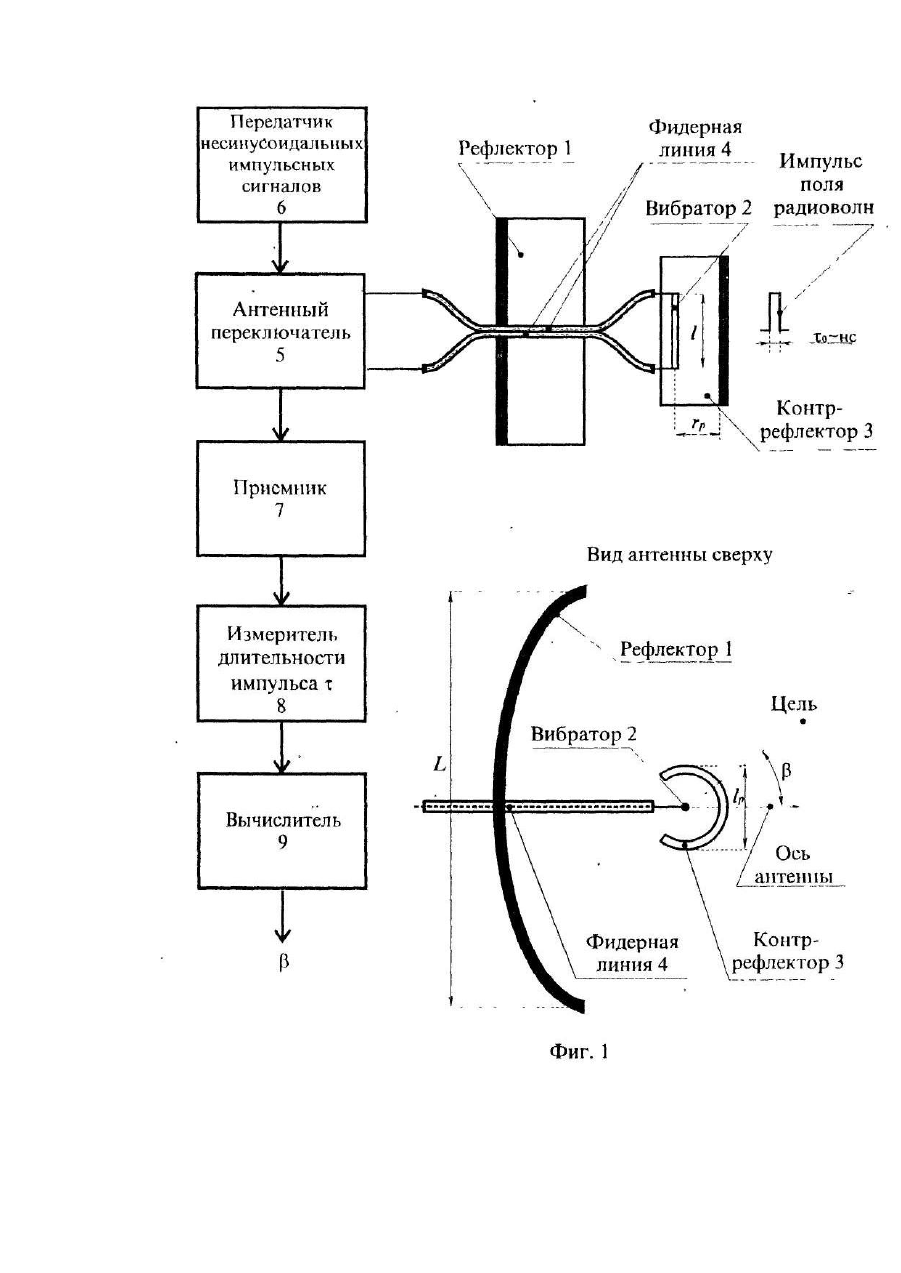
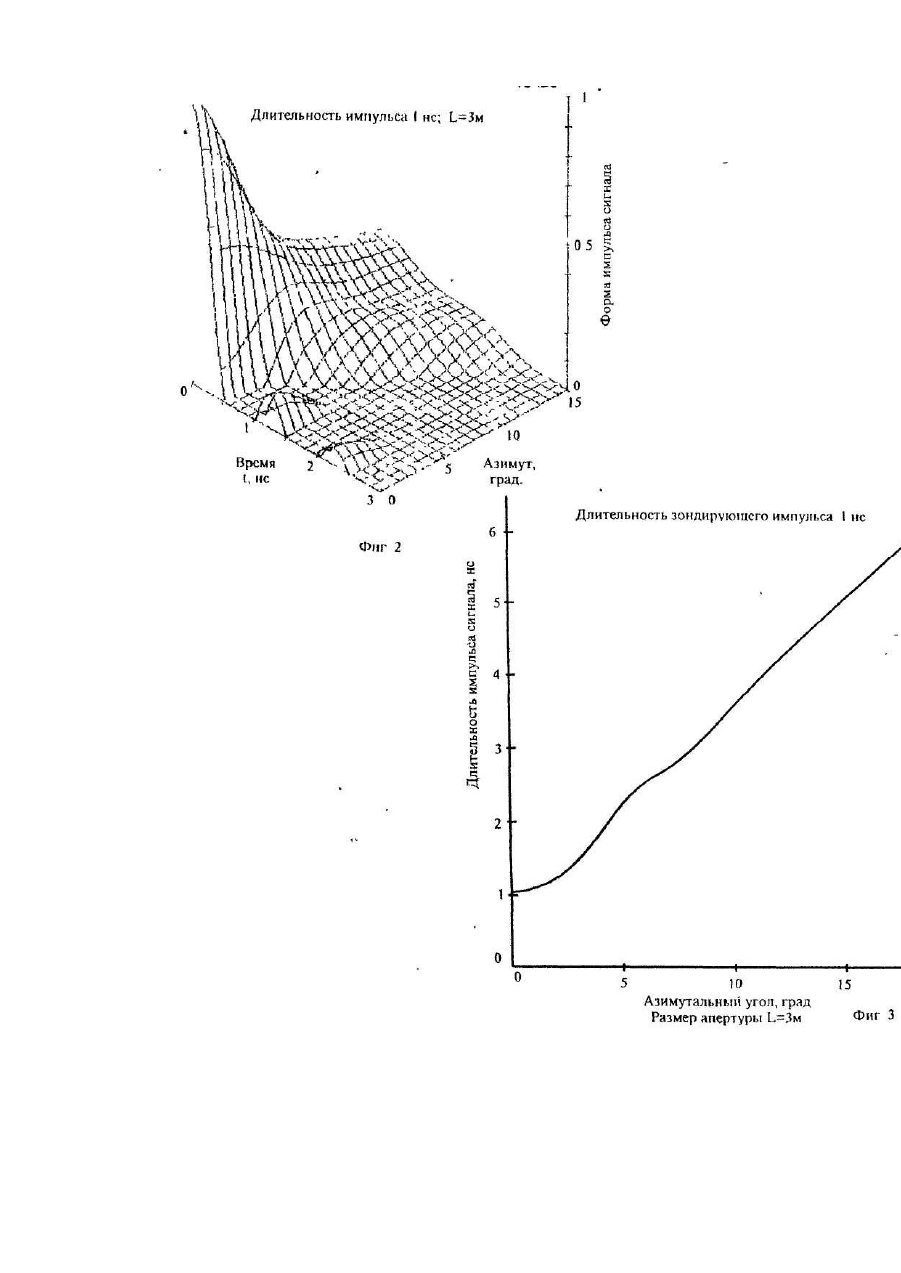
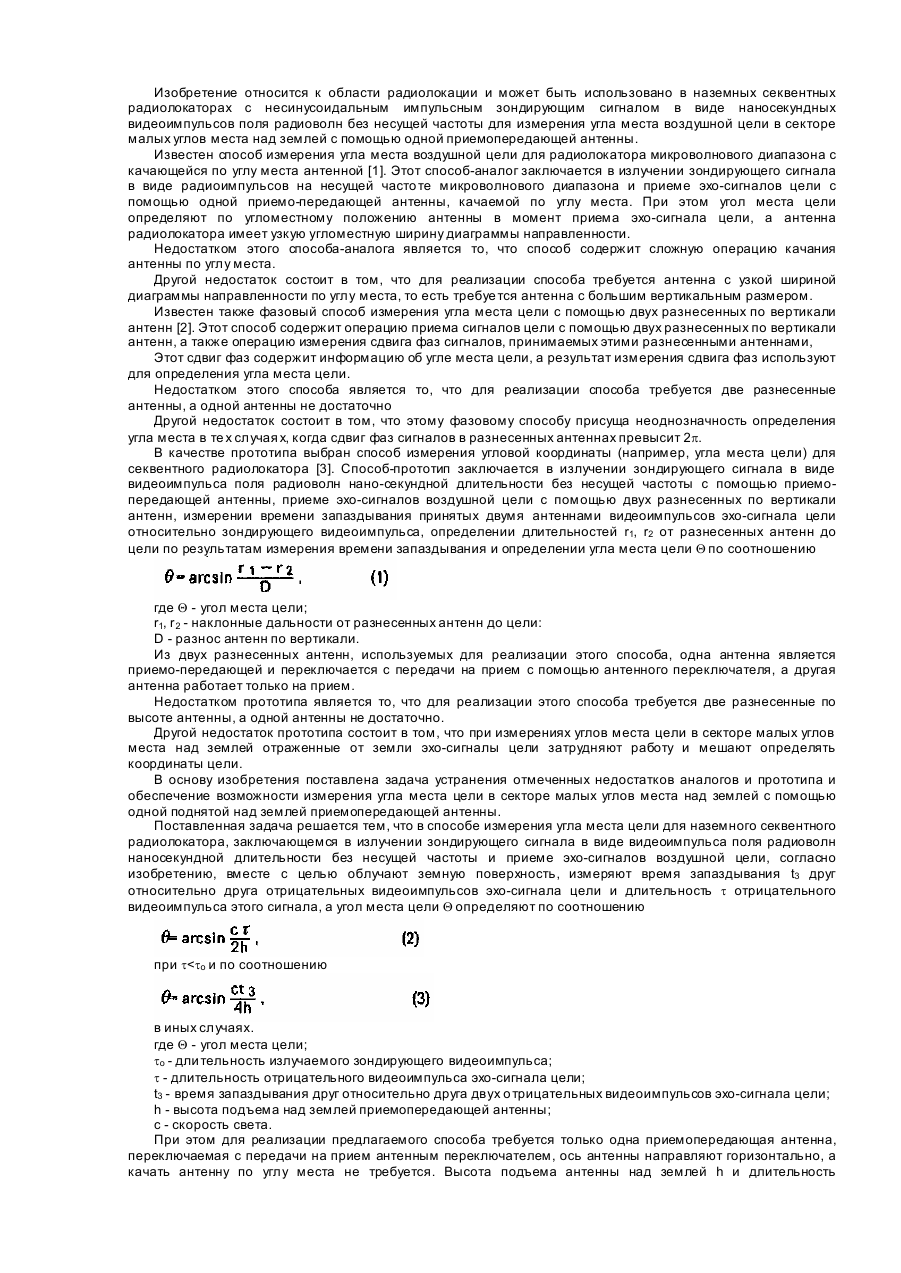
Изобретение относится к области радиолокации и может быть использовано в РЛС обнаружения для измерения азимута воздушных целей. Известен фазовый способ измерения азимута воздушной цели [1], Способ заключается в излучении зондирующего сигнала в виде радиоимпульса на несущей частоте микроволнового диапазона, приеме эхосигналов цели двумя разнесенными поперек трассы антенными в двух каналах приема и измерении сдвига фаз j принимаемых сигналов. При этом азимутальный угол цели b отсчитываемый от оси антенной системы, определяют по формуле где j - измеренный сдвиг фаз принятых сигналов, l - длина волны, d - разнос антенн поперек трассы (база). Недостатком этого аналога является то, что этому фазовому способу присуща неоднозначность, так как известные фазометры могут измерять сдвиг фаз с неопределенностью ±2 p n, где n - целое число В тех случаях когда сдвиг фаз сигналов цели окажется больше 2 p, определение азимута цели становится невозможным. Другим недостатком этого способа является то, что для его реализации требуется использовать две разнесенные антенны, то есть антенная система громоздка. Кроме того необходимо иметь два одинаковых приемника для приема сигналов В качестве прототипа выбран амплитудный способ измерения азимута цели по методу максимума сигнала [1]. Способ заключается в излучении зондирующих сигналов в виде периодической последовательности радиоимпульсов на несущей частоте микроволнового диапазона, вращении антенны по азимуту и приеме отраженных от цели эхо-сигналов. При этом азимут цели определяют по положению антенны в момент, когда сигнал достигает максимальной величины. Для реализации этого способа необходимо использовать антенну с узкой диаграммой направленности в горизонтальной плоскости, а в вертикальной плоскости диаграмма направленности антенны может быть широкой. Для этого подходит, например, зеркальная антенна с рефлектором типа параболический цилиндр и облучателем в виде вертикального вибратора, расположенной на фокальной оси зеркала [2]. Для того, чтобы такой облучатель не излучал энергию в противоположную от зеркала сторону, можно экранировать такое излучение c помощью контррефлектора в виде части цилиндрической поверхности, ось которой совпадает с осью вибратора. В дальнейшем будем условно полагать, что в способе-прототипе использована такая зеркальная антенна. Недостатком способа-прототипа является то, что для его реализации необходимо иметь узкую диаграмму направленности в горизонтальной плоскости, то есть требуется антенна с большим горизонтальным размером апертуры. В основу изобретения поставлена задача обеспечения возможности точного измерения азимутального угла целей в широком секторе с помощью одной антенны сравнительно малых размеров Поставленная задача решается тем, что в способе измерения азимута воздушных целей, заключающемся в излучении импульсных зондирующи х сигналов с помощью зеркальной антенны с рефлектором типа параболический цилиндр с облучателем в виде вертикального вибратора с цилиндрическим контррефлектором и приеме эхо-сигналов цели, предусмотрены следующие отличия: излучают несинусоидальные импульсные сигналы в виде периодической последовательности видеоимпульсов поля радиоволн длительностью 1 нс и менее без несущей частоты, измеряют длительность импульса принимаемого эхо-сигнала, а азимутальный угол цели b определяют путем решения следующего трансцендентного уравнения где to - длительность зондирующего импульса. t - измеренная длительность импульса принятого эхо-сигнала цели, F - часто та следования зондирующи х импульсов, n - номер гармоники спектра зондирующего сигнала, L - поперечный размер рефлектора зеркальной антенны, Iр - поперечный размер контррефлектора облучателя, с - скорость света, b - азимутальный угол цели, отсчитываемый от оси антенны. При этом полагается, что заранее известно, с какой стороны от оси антенны (слева или справа) находится цель. Если такая информация отсутствует, то можно получить ее следующим образом. После вычисления азимутального угла b по формуле (2) поворачивают антенну по азимуту на этот угол b в любую сторону. Если после этого дли тельность импульса эхо-сигнала t уменьшится, то цель находится в этой стороне, а в противном случае - наоборот. Техническая сущность предложенного способа поясняется рисунками на фиг. 1, 2, 3. На фиг. 1 представлена упрощенная структурная схема РЛС, реализующей предложенный способ, а также показан эскиз ее антенны в двух проекциях. На фиг. 2 представлена расчетная зависимость формы импульса принимаемого эхо-сигнала от азимутального угла цели. На фиг. 3 представлена рассчитанная по формуле (2) зависимость длительности импульса эхо-сигнала цели от азимутального угла цели b. Пример реализации предложенного способа представлен на фиг. 1, где показана упрощенная структурная схема РЛС, реализующей этот способ, В состав этой РЛС входят следующие элементы: зеркальная приемопередающая антенна, содержащая рефлектор 1 в виде проводящего параболического цилиндра, вибратор облучателя 2 длиной I < с to, контррефлектор 3 из проводящего или поглощающего материала и фидерную линию 4 из двух коаксиальных кабелей одинаковой длины, внутренние жилы которых подключены к концам вибратора; антенный переключатель 5, переключающий антенну с передачи на прием; передатчик 6 с несинусоидальными импульсными сигналами в виде периодической последовательности с частотой следования F видеоимпульсов поля радиоволн наносекундной длительности to без несущей частоты; приемник 7; измеритель длительности импульса t принимаемого эхо-сигнала цели и вычислитель 9, определяющий по этой длительности t азимутальный угол цели b путем решения трансцендентного уравнения (2). Такая РЛС может быть практически реализована, так как физические основы и принцип построения передающих, приемных и антенных систем для несинусоидальных импульсных сигналов наносекундной длительности известны и описаны в литературе [3], а измерители длительности наносекундных импульсов освоены отечественной промышленностью. Физическая сущность предложенного способа поясняется следующим. Излучают несинусоидальные импульсные сигналы в виде периодической последовательности с периодом видеоимпульса поля радиоволн наносекундной длительности tо без несущей частоты. Излучить такой сигнал можно, например, подводя к проволочному вибратору, длина которого I < с t о, ток пилообразной формы с периодом пилы Т, медленным нарастанием и быстрым спадом тока за время tо [3]. Представляя такой ток рядом Фурье, можно получить для него следующее выражение где lo - амплитуда тока, Т=1 /F - период пилы тока, t - время, n - номер гармоники спектра. Напряженность электрического поля радиоволн, излучаемых вибратором, пропорциональна производной di(t)ldt и равна [3] где Zo = 120 p Ом - волновое сопротивление свободного пространства, I - длина вибратора, r - расстояние, Q - угол места. В формуле (3) количество гармоник спектра тока бесконечно. Однако реальные сигналы всегда имеют ограниченный спектр. Будем полагать, что количество гармоник спектра ограничено полосой пропускания передающей и приемной систем РЛС и эта полоса согласована с длительностью зондирующего импульса to, то есть равна I/to. Тогда количество гармоник спектра сигнала будет равно N=1 /to F. С учетом этого, подставим (3) в (4) и получим следующее выражение для поля радиоволн, излучаемых вибратором облучателя антенны Умножая каждую гармонику спектра в (5) на квадрат диаграммы направленности антенны в горизонтальной плоскости fn(b) для соответствующей гармоники и пренебрегая направленностью антенны в вертикальной плоскости, можно получить следующее выражение для напряжения эхо-сигнала цели U(t) на входе приемника РЛС где r - дальность цели; s - эффективная отражающая поверхность цели; b - азимутальный угол цели; F - часто та следования зондирующи х импульсов; to - дли тельность зондирующего импульса; fn(b) - диаграмма направленности антенны в горизонтальной плоскости для n-ой гармоники спектра сигнала, равная [2] L - поперечный размер апертуры антенны, Iр - поперечный размер контррефлектора облучателя, а отсчет времени t ведется от середины импульса эхо-сигнала. По формулам (6), (7) были проведены расчеты формы импульса эхо-сигнала цели в зависимости от времени t и азимутального угла цели b. Расчеты проведены для длительности импульса зондирующего сигнала tо=1нс, размера апертуры антенны L=3м, размера контррефлектора Iр=0,3 м, а результат расчета представлен на фиг.2. Расчеты показали, что форма импульса эхо-сигнала цели почти не зависит от частоты следования импульсов F, но сильно зависит от азимутального угла b. С увеличением азимутального угла b длительность импульса эхо-сигнала сильно увеличивается и возрастает почти в 7 раз в азимутальном секторе ±20°. Такие значительные изменения длительности импульса можно заметить и измерить с требуемой точностью. Это свойство несинусоидальных импульсных эхо-сигналов предлагается использовать для определения азимутального угла цели b по результату измерения длительности импульса t эхо-сигнала цели. В формуле (6) отсчет времени t ведется от середины импульса, поэтому при t= t /2 напряжение эхосигнала будет равно нулю. Подставляя в (6) t=t/2 и (7) и приравнивая выражение нулю, получим трансцендентное уравнение (2), которое рекомендуется использовать для определения азимутального угла b по измеренному значению длительности импульса эхо-сигнала t. Уравнение (2) имеет единственное решение. Это можно видеть из графика на фиг. 3, где представлена рассчитанная по формуле (2) зависимость длительности импульса эхо-сигнала t от азимутального угла цели В предложенном способе принципиально необходимо излучать несинусоидальные импульсные сигналы наносекундной длительности, так как используемое свойство увеличения t при увеличении b присуще только таким сигналам. Таким образом, предложенный способ может быть практически реализован, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации этого способа. В предложенном способе не требуется разнесенной антенной системы и отсутствует неоднозначность, присущая фазовому способу аналогу. Предложенное техническое решение обеспечивает определение азимутального угла цели в значительном секторе с приемлемой точностью с помощью одной антенны с шириной диаграммой направленности в горизонтальной плоскости. Это представляет значительное преимущество по сравнению со способом-прототипом, в котором для измерения азимута требуется громоздкая антенна с узкой диаграммой направленности по азимуту.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of azimuth of airborne targets
Автори англійськоюZhukov Serhii Anatoliiovych, Bakhvalov Borys Mykolaiovych, Rodin Oleksandr Valeriiovych
Назва патенту російськоюСпособ измерения азимута воздушных целей
Автори російськоюЖуков Сергей Анатольевич, Бахвалов Борис Николаевич, Родин Александр Валериевич
МПК / Мітки
МПК: G01S 17/06
Мітки: повітряних, азимуту, цілей, спосіб, вимірювання
Код посилання
<a href="https://ua.patents.su/5-13423-sposib-vimiryuvannya-azimutu-povitryanikh-cilejj.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання азимуту повітряних цілей</a>
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: секвентного, місця, вимірювання, наземного, радіолокатора, кута, спосіб, цілі
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Вимірювач азимуту і кута місця для трикоординатної рлс
Номер патенту: 13418
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: кута, місця, рлс, трикоординатної, вимірювач, азимуту
Формула / Реферат:
Измеритель азимута и угла места для трехкоординатной РЛС, содержащий передатчик с передающей антенной, приемник и индикатор, отличающийся тем, что передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, приемная антенна выполнена в виде вибраторной антенной решетки с уголковым рефлектором из двух взаимно перпендикулярных проводящих плоскостей, в которой удаление ближнего вибратора от...
Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Номер патенту: 13419
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: вимірювання, радіолокатора, цілі, кутових, секвентного, наземного, координат, спосіб
Формула / Реферат:
Способ измерения угловых координат цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели, отличающийся тем, что излучение и прием осуществляют с помощью одной приемо-передающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы...
Спосіб вимірювання кута місця маловисотної цілі
Номер патенту: 13422
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: кута, маловисотної, спосіб, місця, вимірювання, цілі
Формула / Реферат:
Способ измерения угла места маловысотной цели, заключающийся в излучении периодических зондирующих сигналов с помощью параболической зеркальной антенны с облучателем в виде вибратора с контррефлектором, приеме и индикации эхо-сигналов цели, отличающийся тем, что ось параболического зеркала антенны направляют горизонтально в сторону цели, излучают несинусоидальные импульсные сигналы наносекундной длительности без несущей частоты,...
Спосіб вимірювання швидкості переміщення
Номер патенту: 1822
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: G01P 3/00
Мітки: вимірювання, спосіб, швидкості, переміщення
Формула / Реферат:
Способ измерения скорости перемещения, основанный на формировании временных интервалов, кратных или равных периодам питающего и выходного сигналов синусно-косинусного датчика, и на определении разности между этими интервалами, отличающийся тем, что, с целью повышения точности измерения, вырабатывают в каждом временном интервале, равном или кратном периоду выходного сигнала датчика, импульс с площадью, пропорциональной модулю разности...
Попередній патент: Спосіб вимірювання кута місця маловисотної цілі
Наступний патент: Спосіб екстрагування цукру з бурякової стружки
Випадковий патент: Рецептура суміші пряноароматичної з лимонним ароматом, приготовленої з рослинної сировини, придатної для вирощування в україні