Спосіб вимірювання кутових координат цілі
Номер патенту: 13420
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович

Формула / Реферат
Способ измерения угловых координат цели, заключающийся в излучении и приеме периодических импульсных зондирующих сигналов с помощью одной зеркальной параболической антенны с облучателем в виде вибратора с плоским контррефлектором, отличающийся тем, что излучают несинусоидальные импульсные сигналы длительностью t0 порядка 0,1-1 нс без несущей частоты, измеряют длительность импульса t эхо-сигнала цели и время запаздывания t3 двух видеоимпульсов этого сигнала одинаковой полярности относительно друг друга, а угол места цели q определяют путем решения следующего трансцендентного уравнения
после чего азимутальный угол b вычисляют по соотношению
где tо - длительность импульса зондирующего сигнала;
t -длительность импульса эхо-сигнала;
t3 - время запаздывания двух ближайших импульсов эхо-сигнала одинаковой полярности относительно друг друга;
F - частота следования зондирующих импульсов,
n - номер гармоники спектра сигнала;
R0 - радиус параболического зеркала антенны;
rр - радиус контррефлектора;
Rj - полярные координаты точек на апертуре зеркала;
f - фокусное расстояние параболоида зеркала;
d - расстояние от вибратора до контррефлектора;
с - скорость света;
q, b - угол места и азимутальный угол цели.
Текст
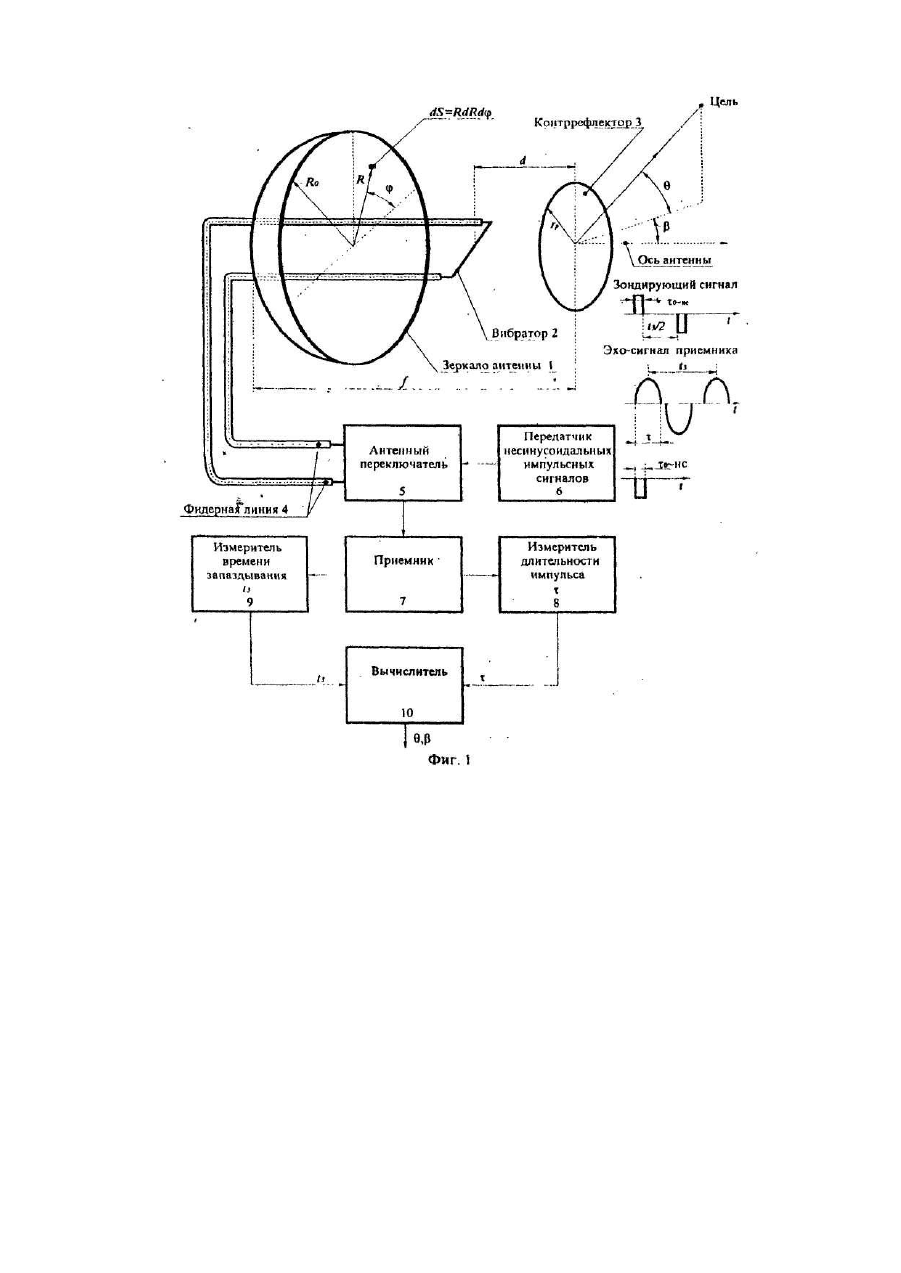
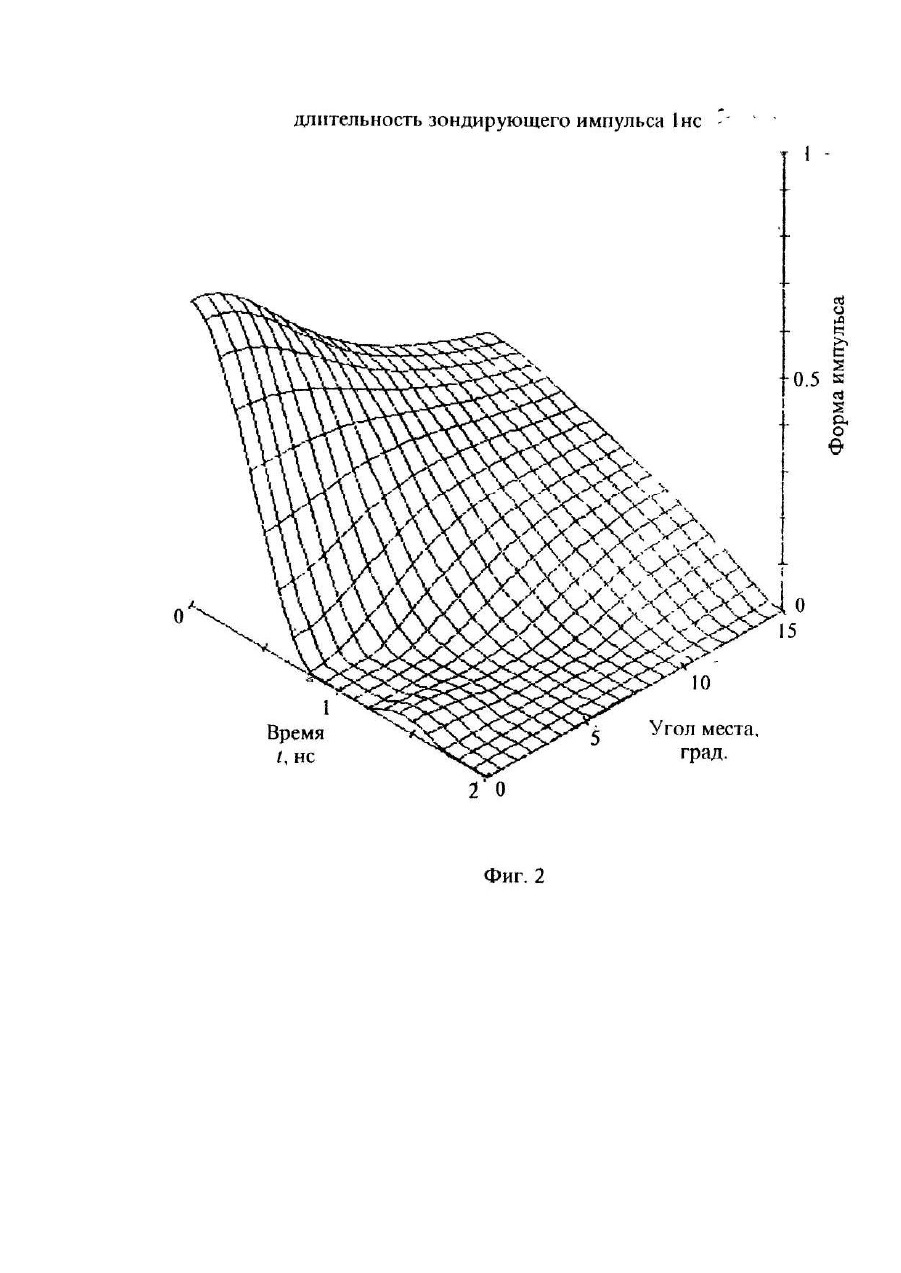
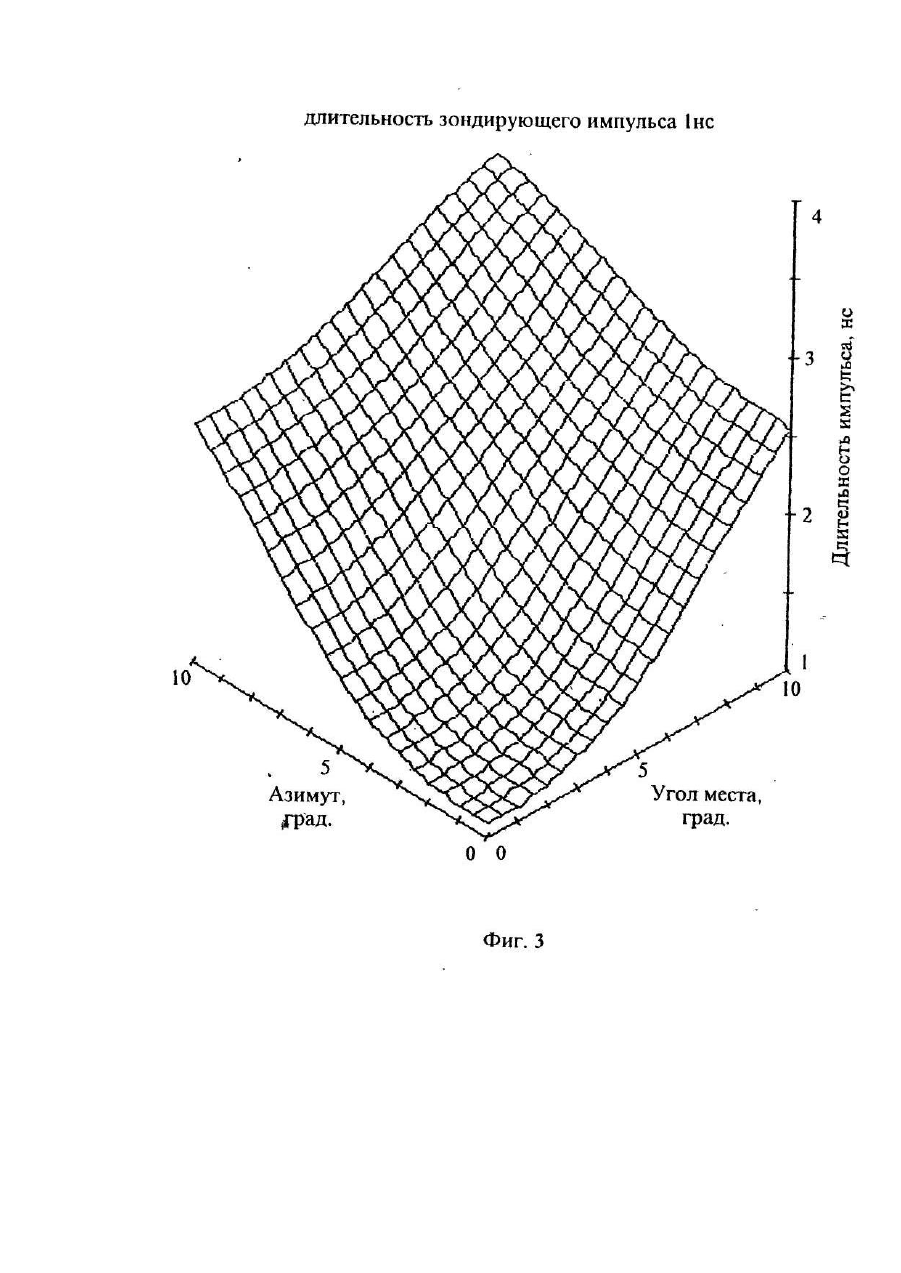
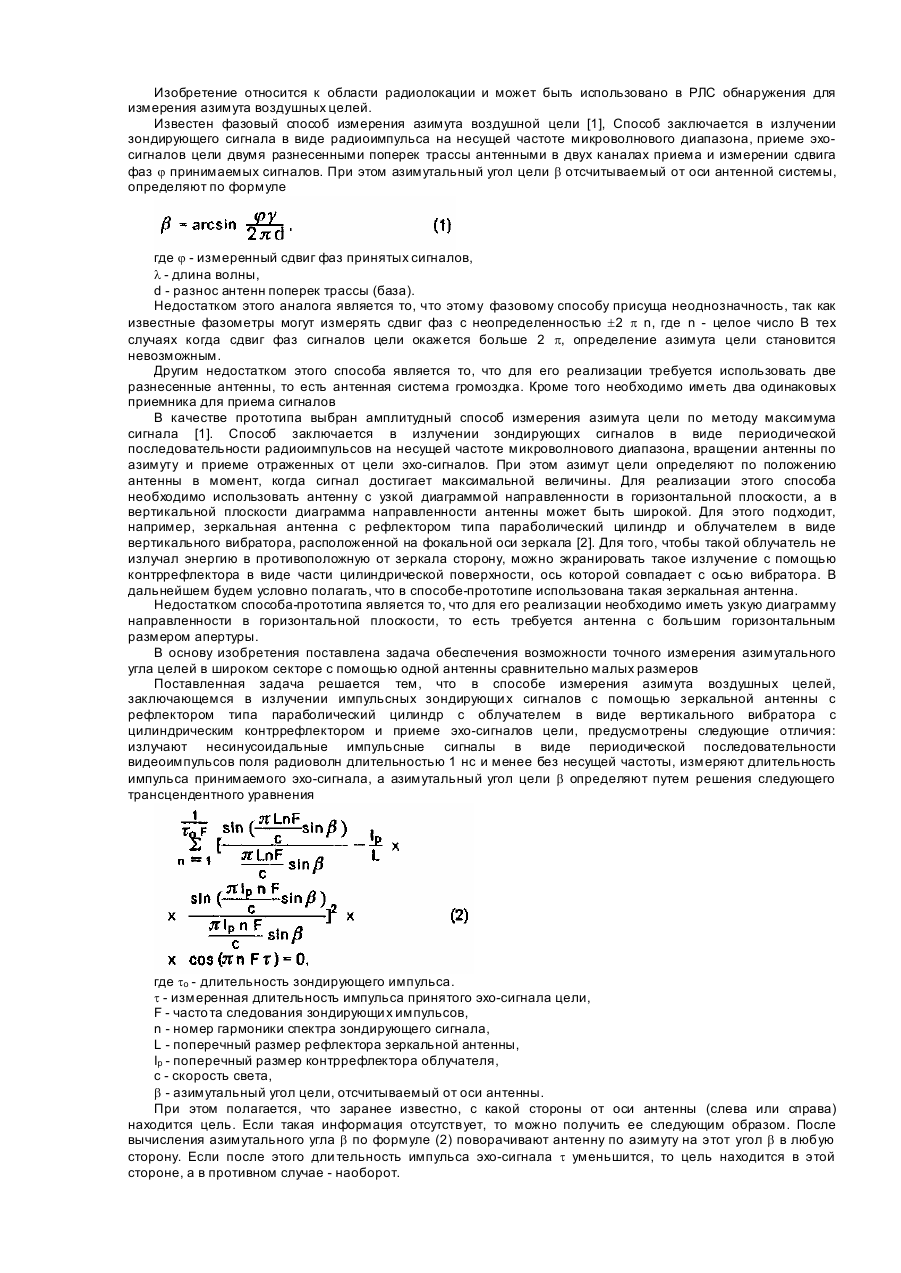
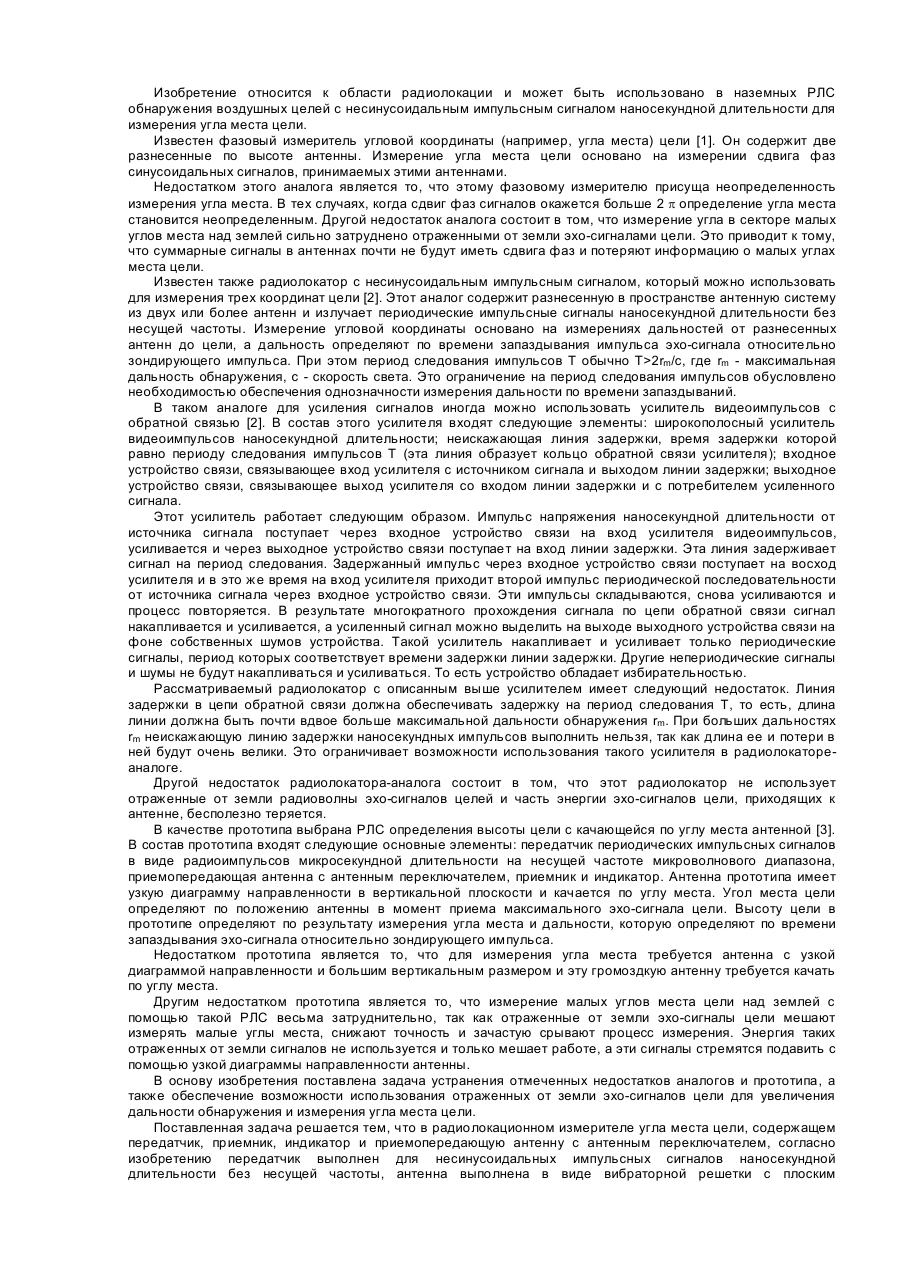
Изобретение относится к области радиолокации и может быть использовано для измерения азимута и угла места воздушной цели в трехкоординатной РЛС с несинусоидальным импульсным сигналом наносекундной длительности. Известен фазовый способ измерения угловых координат цели [1]. Способ заключается в излучении зондирующего сигнала в виде радиоимпульса на несущей частоте микроволнового диапазона, приеме эхосигналов цели разнесенными антеннами и измерении сдвига фаз принятых сигналов. При этом угловая координата цели определяется по этому сдвигу фаз и известным значениям длины волны и разноса антенн. В качестве антенны для реализации этого способа можно использовать, например, зеркальную антенну с металлическим зеркалом в форме параболоида вращения и облучателем в виде вибратора с плоским металлическим контррефлектором, установленным в фокусе зеркала [2]. Недостатком способа-аналога является то, что этому фазовому способу присуща неоднозначность. В тех случаях, когда сдвиг фаз сигналов цели окажется больше 2 я, определение угловой координаты становится невозможным. Другой недостаток этого способа состоит в том, что для измерения двух угловых координат цели требуется четыре антенны, две из которых разнесены по высоте, а две другие - по горизонтали поперек трассы. Это существенно усложняет антенную систему, необходимую для реализации способа. В качестве прототипа выбран амплитудный способ измерения угловы х координат цели, используемый а РЛС определения высоты с качающейся диаграммой направленности [3]. Способ-прототип заключается в качании одной приемо-передающей зеркальной антенны по углу места и вращении ее по азимуту, излучении периодических зондирующи х сигналов в виде радиоимпульсов микросекундной длительности на несущей частоте микроволнового диапазона, приеме и индикации эхо-сигналов цели. При этом угловые координаты цели определяют по положению антенны в момент приема максимального эхо-сигнала цели, Условно будем полагать, что в способе-прототипе использована зеркальная антенна с металлическим зеркалом в форме параболоида вращения с облучателем в виде вибратора с плоским металлическим контррефлектором, установленным в фокусе зеркала [2]. Недостатком способа-прототипа является то, что для его реализации необходима антенна с узкой диаграммой направленности, то есть требуется антенна больших размеров. Другой недостаток прототипа состоит в наличии технически сложных операций вращения и качания громоздкой антенны по азимуту и углу места. В основу изобретения поставлена задача устранения указанных недостатков аналога и прототипа и обеспечение возможности измерения азимута и угла места цели с помощью одной приемо-передающей зеркальной антенны сравнительно небольших размеров без использования операции качания антенны по углу места. Поставленная задача решается тем, что в способе измерения угловых координат цели, заключающемся в излучении и приеме периодических импульсных зондирующи х сигналов с помощью одной зеркальной параболической антенны с облучателем в виде вибратора с плоским контррефлектором, согласно изобретению излучают несинусоидальные импульсные сигналы длительностью tо порядка 0,1-1 не без несущей часто ты, измеряют длительность импульса t эхо-сигнала цели и время запаздывания t1 двух видеоимпульсов этого сигнала одинаковой полярности относительно друг друга, а угол места цели Q определяют путем решения следующего трансцендентного уравнения после чего азимутальный угол b вычисляют по соотношению где tо - длительность импульса зондирующего сигнала; t - длительность импульса эхо-сигнала; t3 - время запаздывания двух ближайших импульсов эхо-сигнала одинаковой полярности относительно друг др уга; F - часто та следования зондирующи х импульсов; n - номер гармоники спектра сигнала; Ro - радиус параболического зеркала антенны; rр - радиус контррефлектора; R, j - полярные координаты точек на апертуре зеркала; f - фокусное расстояние параболоида зеркала; d - расстояние от вибратора до контррефлектора; с - скорость света; Q,b - угол места и азимутальный угол цели относительно оси антенны. При этом имевшаяся в способе-прототипе операция качания антенны по углу места в предложенном способе не используется и нет несинусоидальных импульсных сигналов описана в литературе [4], а конструкция зеркальной антенны с таким облучателем описана в литературе [2]. Физическая сущность предложенного способа поясняется следующим. Вибратор 2 излучает несинусоидальные периодические импульсы поля радиоволн наносекундной длительности без несущей частоты. Радиоволны отражаются от зеркала антенны 1, а также от контррефлектора 3 и зеркала 1 и изменяют полярность импульса поля при каждом отражении. В результате одному импульсу вибратора 2 будет соответствова ть два разнополярных импульса, излучаемых антенной как показано на эпюре зондирующего сигнала на фиг.1. Зондирующие импульсы отражаются от цели и возвращаются к антенне, каждый импульс эхо-сигнала отражается от зеркала 1 и принимается вибратором 2, а также отражается контррефлектором 3 и снова принимается вибратором 1. То есть от одного зондирующего импульса вибратора 2 в приемник 7 будет возвращаться четыре импульса эхо-сигнала. Два из этих четырех импульсов совпадут по времени и сложатся. В результате сигнал на выходе приемника будет состоять из трех импульсов как показано на эпюре эхо-сигнала приемника на фиг.1. Крайние из этих трех импульсов имеют одинаковую полярность и запаздывают друг относительно друга на время t3 где d - расстояние от вибратора 2 до контррефлектора 3; с - скорость света; Q,b - азимутальный угол и угол места цели, отсчитываемые от оси антенны. Средний импульс эхо-сигнала имеет полярность, противоположную полярности крайних импульсов, и почти вдвое больше по амплитуде, так как он образован сложением двух импульсов. Из соотношения (3) получена формула (2), которую рекомендуется использовать для расчета азимутального угла цели b. Вибратор облучателя антенны 2 излучает несинусоидальные импульсные сигналы в виде периодической последовательности с периодом Т = 1/F видеоимпульсов поля радиоволн длительностью to порядка 0,1-1 не без несущей частоты. Излучить такой сигнал можно, например, подводя с концов к проволочному вибратору, длина которого I< сto, ток пилообразной формы с периодом пилы Т, медленным нарастанием и быстрым спадом за время to [4]. Представляя такой ток рядом Фурье, можно получить для него следующее выражение где lo - амплитуда тока; Т - период пилы; t - время; n - номер гармоники спектра. Напряженность электрического поля радиоволн, излучаемых вибратором, пропорциональна производной di(t)/dt и равна [4] где Zo = 120 pОм - волновое сопротивление свободного пространства; I - длина вибратора; r - расстояние; g - угол отклонения луча от оси вибратора. В формуле (4) количество гармоник спектра тока бесконечно. Однако реальные сигналы всегда имеют ограниченный спектр. Будем полагать, что количество гармоник спектра ограничено полосой пропускания передающей и приемной систем РЛС и эта полоса согласована с длительностью to зондирующего импульса, то есть равна 1/tо. То гда количество гармоник спектра сигнала равно N = 1/toF. С учетом этого подставим (4) в (5) и получим следующее выражение для поля радиоволн, излучаемых вибратором антенны Умножая каждую гармонику спектра в (6) на квадрат диаграммы направленности антенны Fa (Q,b) для соответствующей гармоники, можно получить следующее выражение для напряжения эхо-сигнала цели на входе приемника РЛС где r - дальность цели; sц - эффективная отражающая поверхность цели; Q,b - угловые координаты цели, отсчитываемые от оси антенны; Fa (Q,b) - нормированная диаграмма направленности антенны: Выражение для пространственной диаграммы направленности зеркальной антенны с облучателем в виде вибратора с контррефлектором известно и описано в литературе [2]. Подставляя это выражение в (7) и опуская несущественные преобразования, получим следующее соотношение для напряжения эхо-сигнала цели на входе приемника РЛС где А - коэффициент, не зависящий от направленных свойств антенны, а другие обозначения были пояснены выше. Отсчет времени t в (8) ведется от середины среднего импульса эхо-сигнала, состоящего из трех импульсов, крайние из которых имеют одинаковую полярность. Расчеты по формуле (8) показали, что длительность импульса t эхо-сигнала цели существенно зависит от угловы х координат цели Q,b относительно оси антенны. Пример расчета формы импульса эхо-сигнала (зависимости от времени) в зависимости от угла места цели Q при азимутальном угле цели b= 5° представлен на фиг.2. Этот пример выполнен для зондирующего импульса to=1 не и зеркальной антенны с радиусом зеркала Ro=1,5 м, фокусным расстоянием f = А м, радиусом контррефлектора 0,3 м и расстоянием между вибратором и контррефлектором d = 1 м. Здесь изображена правая половина среднего импульса эхо-сигнала, а крайние импульсы выходят за пределы шкалы графика и на этом рисунке не показаны. Зависимость длительности импульса эхо-сигнала t от угловы х координат Q,b для тех же параметров антенны показана на фиг.3. Из рисунков на фиг.2,3 видно, что в секторе ±10° длительность импульса эхо-сигнал t увеличивается почти в четыре раза по сравнению с длительностью зондирующего импульса о и возрастает с увеличением отклонения направления на цель от оси антенны. Такие значительные изменения длительности импульса можно заметить, измерить и использовать для определения угловых координат цели. Первый нуль кривой формы среднего импульса эхо-сигнала соответствуе т времени t=t/2. Подставляя это значение времени в (8), заменяя sin b соответствующим выражением, полученным из (3), и приравнивая (8) к нулю, получим трансцендентное уравнение (1), которое рекомендуется использовать для определения угла места цели Q по результатам измерения t и t3. Расчеты показали также, что форма импульса эхо-сигнала почти не зависит от частоты следования импульсов F. Это позволяет при решении уравнения (1) условно увеличить во много раз частоту следования импульсов F, что практически не повлияет на результат, на во много раз сократит машинное время расчетов (уменьшит количество членов суммы) и позволит быстро решить уравнение (1) с помощью вычислителя. Следует иметь в виду, что результат расчета азимутального угла b по формуле (2) имеет неопределенный знак. Поэтому требуется иметь дополнительную информацию о том, с какой стороны от оси антенны (слева или справа) находится цель. Если такая информация отсутствует, то ее можно получить следующим образом. После расчета b по формуле (2) поворачивают антенну по азимуту на этот угол в любую сторону. Если после этого дли тельность импульса эхо-сигнала уменьшится, то цель находится в этой стороне, а если возрастет - то в противоположной стороне. В предложенном способе принципиально необходимо излучать несинусоидальные импульсные сигналы наносекундной длительности, так как используемое свойство увеличения t при увеличении Q и b присуще только таким сигналам. Таким образом, предложенный способ может быть практически реализован, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации способа. Предложенное техническое решение исключает имевшуюся в прототипе операцию качания антенные по углу места и позволяет осуществлять измерение угловы х координат цели с помощью одной антенны с широкой диаграммной направленности.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of angular coordinates of target
Автори англійськоюZhukov Serhii Anatoliiovych, Bakhvalov Borys Mykolaiovych, Rodin Oleksandr Valeriiovych
Назва патенту російськоюСпособ измерения угловых координат цели
Автори російськоюЖуков Сергей Анатольевич, Бахвалов Борис Николаевич, Родин Александр Валериевич
МПК / Мітки
МПК: G01S 17/06
Мітки: цілі, координат, вимірювання, спосіб, кутових
Код посилання
<a href="https://ua.patents.su/6-13420-sposib-vimiryuvannya-kutovikh-koordinat-cili.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання кутових координат цілі</a>
Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Номер патенту: 13419
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: радіолокатора, вимірювання, наземного, цілі, координат, кутових, спосіб, секвентного
Формула / Реферат:
Способ измерения угловых координат цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели, отличающийся тем, что излучение и прием осуществляют с помощью одной приемо-передающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы...
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: вимірювання, кута, цілі, наземного, місця, спосіб, секвентного, радіолокатора
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Спосіб вимірювання кута місця маловисотної цілі
Номер патенту: 13422
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: місця, маловисотної, цілі, кута, вимірювання, спосіб
Формула / Реферат:
Способ измерения угла места маловысотной цели, заключающийся в излучении периодических зондирующих сигналов с помощью параболической зеркальной антенны с облучателем в виде вибратора с контррефлектором, приеме и индикации эхо-сигналов цели, отличающийся тем, что ось параболического зеркала антенны направляют горизонтально в сторону цели, излучают несинусоидальные импульсные сигналы наносекундной длительности без несущей частоты,...
Спосіб вимірювання азимуту повітряних цілей
Номер патенту: 13423
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: спосіб, цілей, вимірювання, азимуту, повітряних
Формула / Реферат:
Способ измерения азимута воздушных целей, заключающийся в излучении импульсных зондирующих сигналов с помощью зеркальной антенны с рефлектором типа параболический цилиндр с облучателем в виде вертикального вибратора с цилиндрическим контррефлектором и приеме эхо-сигналов цели, отличающийся тем, что излучают несинусоидальные импульсные сигналы в виде периодической последовательности видеоимпульсов поля радиоволн длительностью 0,1-1 не без...
Радіолокаційний вимірювач кута місця цілі
Номер патенту: 13421
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: радіолокаційний, місця, цілі, кута, вимірювач
Формула / Реферат:
Радиолокационный измеритель угла места цели, содержащий передатчик, приемник, индикатор и приемо-передающую антенну с антенным переключателем, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами по высоте равно высоте h подъема нижнего...
Попередній патент: Лічильник газу
Наступний патент: Спосіб діагностики гострої аневрізми лівого шлуночка
Випадковий патент: Кристалічна металева сіль глюкозамінсульфату та спосіб одержання (варіанти)