Ультразвуковий частотно-часовий витратомір
Номер патенту: 17353
Опубліковано: 29.12.1999
Автори: Мухарскій Алєксандр Матвєєвіч, Шєстаков Леонід Владіміровіч, Романов Анатолій Філіповіч, Пугачьов Ігорь Сємьоновіч
Формула / Реферат
Ультразвуковой частотно-временной расходомер, содержащий два приемоизлучающих преобразователя, первый коммутатор, выход которого соединен с последовательно соединенными усилителем, амплитудным селектором и временным селектором, второй коммутатор, соединенный с формирователем зондирующего сигнала, вход которого соединен с первым выходом распределителя тактов, второй выход которого соединен с управляющими входами первого, второго и третьего коммутаторов и распределителя сигнала подстройки, третий выход - со вторым управляющим входом распределителя сигнала подстройки и первым входом вычислительного устройства, четвертый выход - с первым входом формирователя сигнала величины подстройки, а пятый выход - с первым входом делителя частоты, второй вход которого соединен с выходом третьего коммутатора и входом распределителя тактов, а выход - со вторым входом временного селектора, выход которого соединен с третьим входом распределителя сигнала подстройки, четвертый вход которого соединен с выходом формирователя сигнала величины подстройки, а первый и второй выходы соединены со входами соответственно первой и второй схем управления, а также первый и второй управляемые генераторы, выходы которых соединены со входами третьего коммутатора и измерителя разности, выход которого соединен со вторым входом вычислительного устройства, отличающийся тем, что он содержит третью и четвертую схемы управления, четвертый и пятый коммутаторы, регистр знака подстройки, схему совпадения и блок регистров сдвига, а также устройство переключения каналов, причем входы третьей и четвертой схем управления соединены соответственно с третьим и четвертым выходами распределителя сигнала подстройки, выходы - с информационными входами четвертого и пятого коммутаторов, другие информационные входы которых соединены с выходами первой и второй схем управления, первые управляющие входы - с третьим выходом распределителя тактов, а выходы соединены со входами первого и второго управляемых генераторов, кроме того первый вход регистра знака подстройки соединен с выходом временного селектора и первым входом схемы совпадения, второй вход - с выходом формирователя сигнала величины подстройки, выход регистра знака подстройки соединен со вторым входом схемы совпадения, выход которой соединен с первым входом блока регистров сдвига, второй вход которого соединен с шестым выходом распределителя тактов, а выход соединен со вторым входом формирователя сигнала величины подстройки, при этом первый и второй информационные входы/выходы устройства переключения каналов подключены к приемоизлучающим преобразователям, третий и четвертый информационные входы/выходы подключены к первому и второму коммутаторам, а управляющий вход подключен к третьему выходу распределителя тактов, а кроме того, выход вычислительного устройства соединен со вторым управляющим входом четвертого и пятого коммутаторов и вторым входом распределителя тактов.
Текст
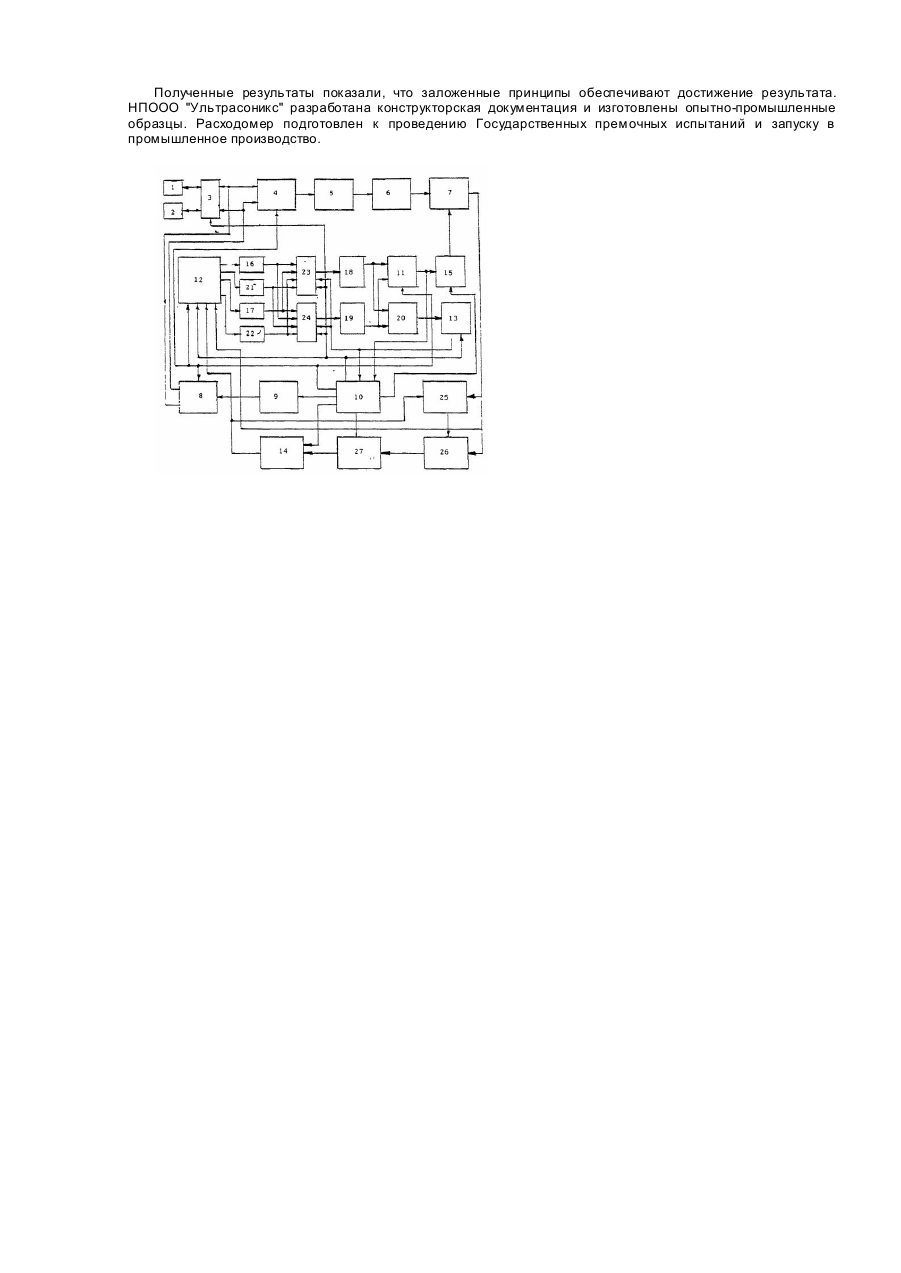
Изобретение относится к измерительной технике и может быть использовано для измерения расхода жидких и газообразных сред. Известен импульсный одноканальный ультразвуковой расходомер, основанный на измерении разности временных интервалов при распространении ультразвука по потоку и против него. Измерение осуществляется с помощью высокостабильного генератора, дискретными импульсами которого заполняются измеряемые временные промежутки. Подсчитанная счетчиком разность импульсов является мерой расхода [1]. Недостатком указанного расходомера является невысокая точность измерений, которая ограничивается величиной единицы дискретного отсчета, т.е. периодом колебаний генератора. Известен импульсный одноканальный ультразвуковой расходомер, содержащий два управляемых по частоте генератора, выходами подсоединенных к входам первого коммутатора, а также последовательно включенные формирователь зондирующи х импульсов, второй коммутатор, приемно-передающие преобразователи акустического канала расходомера, третий коммутатор, усилитель-формирователь и временной селектор, при этом вторые выходы управляемых генераторов связаны с измерителем разности частот [2]. Однако для указанного устройства характерна недостаточно высокая точность измерений, обусловленная тем, что известное устройство представляет собой по существу автоматическую систему непрерывного регулирования, имеющую значительную зону нечувствительности, а также невысокую оперативность измерений. Известен ультразвуковой расходомер, содержащий преобразователь расхода с несколькими парами приемоизлучающих головок, подключенных через первый и второй переключатели к формирователю возбуждающих импульсов и усилителю принятых сигналов, выход которого через третий переключатель подключен ко входу формирователя возбуждающих импульсов, импульсные генераторы управляемой частоты, выходы которых подключены к измерительной схеме и к входам формирователя возбуждающих импульсов и дискриминатора времени, второй вход которого подключен к третьему переключателю, а выход подключен к входам импульсных генераторов управляемой частоты [3]. Недостатком известного расходомера является нестабильность временной задержки в электронных блоках в разных направлениях излучения, вызываемая изменением внешних влияющих факторов, что приводит к увеличению погрешности измерения. Для многоканальных приборов значение этой погрешности выше, чем для одноканальных, поскольку она определяется суммой нестабильности всех каналов. Известен также расходомер, в котором имеется преобразователь расхода с акустическими каналами на пьезопреобразователях, подключенных через переключатели к выходу формирователя возбуждающих импульсов и к входу усилителя принятых сигналов, выход которого через третий переключатель подключен к входу формирователя возбуждающих импульсов и дискриминатора времени, выход которого через четвертый переключатель соединен с импульсными генераторами управляемой частоты. Выходы этих генераторов соединены с формирователем и дискриминатором времени, а также с измерительным устройством. Счетчик импульсов также подключен к выходам генераторов. К его выходу подключен формирователь импульсов управления коммутатором, выход которого соединен с коммутатором [4]. Такая конфигурация позволяет компенсировать задержки электронных схем, связанные только с управляемыми генераторами. Существенная составляющая электронной задержки на переключающих элементах не компенсируется, поскольку эти переключатели жестко связаны с соответствующими датчиками. Наиболее близким из известных является расходомер, реализующий частотно-временной принцип измерения, в котором имеются два управляемых генератора, каждый из которых управляется своим каналом "по потоку" и "против", включающим схему установки коэффициента внутреннего умножения, временной селектор, реверсивный счетчик, схему управления частотой генератора. В каждом из двух каналов по и против потока устанавливается свой коэффициент внутреннего умножения. Сигналы с генераторов поступают на четырехвходовое измерительное устройство, которое вычисляет величину расхода по определенному алгоритму и на вход которого поступают коды коэффициентов внутреннего умножения. Переключение блоков расходомера на работу по и против потока осуществляется тактовым распределителем через коммутатор, который подает сигналы на ключи. Расходомер позволяет за счет установления различных коэффициентов внутреннего умножения в каналах по и против потока устранить явление "захвата" при измерении малых расходов [5]. Сдвиг частот осуществляется за счет выбора разных коэффициентов деления частоты управляемых генераторов гц и п 2. Для учета сдвига требуется дополнительная операция вычитания разностной частоты. Кроме того, перестройка осуществляется путем изменения кода реверсивного счетчика на единицу, что обеспечивает постоянную скорость перестройки при изменении скорости потока и не позволяет учесть динамику изменения потока. В основу решаемой заявленным изобретением задачи заложено повышение точности измерений расхода жидких и газообразных сред в широком диапазоне измеряемых расходов. Задача решается таким образом, что в ультразвуковой частотно-временной расходомер, содержащий два приемоизлучающих преобразователя, первый коммутатор, усилитель, амплитудный и временной селекторы, второй коммутатор, формирователь зондирующего сигнала, распределитель тактов, третий коммутатор и распределитель сигнала подстройки, вычислительное устройство, формирователь сигнала величины подстройки, делитель частоты, первую и вторую схемы управления, а также первый и второй управляемые генераторы, измеритель разности, согласно изобретению включены дополнительно третья и четвертая схемы управления, четвертый и пятый коммутаторы, регистр знака подстройки, схема совпадения, блок регистров сдвига и устройство переключения каналов, причем входы третьей и четвертой схем управления соединены соответственно с третьим и четвертым выходами распределителя сигнала подстройки, а выходы - с третьим и четвертым информационными входами четвертого и пятого коммутаторов, первые и вторые информационные входы которых соединены с выходами соответственно первой и второй схем управления, первые управляющие входы соединены с выходом распределителя тактов, вторые управляющие входы - с выходом вычислительного устройства, а вы ходы соединены со входами первого и второго управляемых генераторов, а кроме того первый вход регистра знака подстройки соединен с выходом временного селектора и первым входом схемы совпадения, второй вход - с выходом формирователя сигнала величины подстройки, выход регистра знака подстройки соединен со вторым входом схемы совпадения, выход которой соединен с первым входом блока регистров сдвига, второй вход которого соединен с шестым выходом распределителя тактов, а выход соединен со вторым входом формирователя сигнала величины подстройки, кроме того, первый и второй информационные входы/выходы устройства переключения каналов подключены к приемоизлучающим преобразователям, третий и четвертый информационные входы/вы ходы подключены к первому и второму коммутаторам, а управляющий вход подключен к третьему выходу распределителя тактов, второй вход которого соединен с выходом вычислительного устройства и вторыми управляющими входами четвертого и пятого коммутаторов. Сравнительный анализ известных и заявленного устройств показывает, что заявленный ультразвуковой частотно-временной расходомер обеспечивает работу с реверсивными потоками, причем при измерении малых расходов исключается явление "захвата частот". Кроме того, имеется возможность вычисления суммарной частоты, что позволяет выполнять периодическую поверку и калибровку расходомера в автоматическом режиме при изменении параметров измеряемой среды, что приводит к подавлению их влияния, а, следовательно, и повышению точности измерений. Введение дополнительных возможностей, таких, как самокалибровка, работа с реверсивными потоками и устранение явления захвата частот, реализованное с помощью работы двух управляемых генераторов в режиме формирования четырех частот с постоянным смещением частот, а также выполнение подстройки с переменным шагом приводит к улучшению динамических характеристик расходомера и повышению точности измерений для изменяющихся потоков. Введение дополнительной коммутации каналов приводит к тому, что устраняется смещение "нуля" характеристики, т.к. в этом случае разность частот не зависит от разности времен распространения сигнала в каналах обработки. Все это позволяет сделать вывод, что новая совокупность признаков заявленного расходомера соответствует критерию "изобретательский уровень". Работа ультразвукового частотно-временного расходомера основана на измерении разности времен распространения ультразвукового сигнала по и против потока измеряемой среды. При зондировании по потоку время распространения сигнала в измеряемой среде равно tp1 = L/(c + v cosa), а против потока tp2 = L/(c - v cosa), где L - расстояние, проходимое ультразвуком в измеряемой среде, с - скорость ультразвука в измеряемой среде; v - скорость движения измеряемой среды; cosα - косинус угла между направлением излучения ультразвукового сигнала и направлением потока среды. Общее время распространения зондирующего сигнала равно T1 = tp1 + te1 T2 = tp2 + te2 где tp1 и t p2 - времена распространения сигнала в измеряемой среде; te1 и te2 времена распространения сигнала в элементах конструкции и электрических цепях. Процесс измерения скорости потока, а, следовательно, расхода измеряемой среды, разбивается на два цикла. В первом цикле при зондировании по потоку работает управляемый генератор 1 , который формирует частоту f 1, обратно пропорциональную времени распространения ультразвукового сигнала, а схема формирования временных интервалов делит эту частоту с коэффициентом k (T1 = k/f 1). При зондировании против потока работает управляемый генератор 2, который формирует частоту f2 при коэффициенте деления k-m так, что Т2 = (k-m)/f2 . Коэффициент k выбирается из условия k= T0f0 , где Т 0 - время распространения ультразвука между датчиками в неподвижной среде для средней скорости ультразвука, а f 0 - средняя частота управляемых генераторов. Во втором цикле измерения при зондировании по потоку работает третий управляемый генератор, частота которого равна f3, коэффициент деления (k-m), а против потока - четвертый генератор с частотой f4 при коэффициенте деления k, т.е. Т3 = (k-m)/f 3, T4=k/f4 . Разность частот, получаемая в первом цикле, равна df1 = f 1 - f2 = k/T1 , - (k-m)/T2 . Аналогичная разность частот, получаемая во втором цикле, равна df2 = f 4 - f3 = k/T4 - (k-m)/T3. Без переключения каналов имеем Т3= Т 1, Т4 = Т2 , тогда, введя еще одну операцию вычитания, в результате получаем df =(2k-m) (1/T1-1/T2). С учетом выражений для T1 и Т2 получим df = 2(2k-m) cosa v/(L+t0c) + (2k - m)c2dt/(L2 + L с t 0), где t0 = t e1+ te2, dt = t e2 - t e1 Как видно из полученного выражения, при наличии разности времен распространения в каналах обработки появляется слагаемое, зависящее от этой разности и скорости распространения ультразвука. Изменение разности задержек, равно как и изменение скорости ультразвука, например, в зависимости от температуры, приводит к смещению "нуля" характеристики и, следовательно, к появлению дополнительной систематической погрешности. Введение дополнительной коммутации каналов приводит к тому, что во втором цикле измерения по потоку время распространения сигнала равно T3 = t р1 + t е2 , а против потока T4 = tp2 + te1 В результате после преобразований результирующая разность частот будет иметь вид df = 2[2k(1 + t 0 с/L) - m] cosa v/(L + 2 t0 c), т.е. разность частот не зависит от разности времен распространения сигнала в каналах обработки. Наличие разных коэффициентов деления для управляемых генераторов приводит к смещению их рабочих частот друг о тносительно друга на величину fs = m f0 /k, где f0 - частота генераторов при нулевом потоке, что исключает явление "захвата частот" при измерении малых расходов. Однако при этом ограничивается величина максимальной измеряемой скорости потока, которая определяется смещением частот генераторов fs. Вместе с тем для больших расходов (больших скоростей потока) частоты генераторов отличаются на значительную величину и поэтому не требуется дополнительное смещение. Для расширения диапазона измерений в область больших расходов вводится дополнительное управление четвертого и пятого коммутаторов с вычислительного устройства, которое в зависимости от величины измеряемого параметра коммутируе т схемы управления из режима со смещением частот в режим без смещения и обратно. Расход вычисляется по формуле Q = vpD2/4, (1) где D - диаметр мерного участка, p =3,14159265. На чертеже приведена блок-схема ультразвукового частотно-временного расходомера. Ультразвуковой частотно-временной расходомер содержит два приемоизлучающи х преобразователя 1 и 2, входы/ /выходы которых через устройство переключения каналов 3 и первый коммутатор 4 соединены с последовательно соединенными усилителем 5, амплитудным селектором 6 и временным селектором 7, а через устройство переключения каналов 3 и второй коммутатор 8-е формирователем зондирующего сигнала 9, вход которого соединен с первым выходом распределителя тактов 10, второй выход которого соединен с управляющими входами первого 4, второго 8 и третьего 11 коммутаторов и распределителя 12 сигнала подстройки, третий выход - со вторым управляющим входом распределителя сигнала подстройки 12 и первым входом вычислительного устройства 13, четвертый выход - с первым входом формирователя сигнала величины подстройки 14, а пятый выход - с первым входом делителя частоты 15, второй вход которого соединен с выходом третьего коммутатора 11 и входом распределителя тактов 10, а выход - со вторым входом временного селектора 7, выход которого соединен с третьим входом распределителя 12 сигнала подстройки, четвертый вход которого соединен с выходом формирователя сигнала величины подстройки 14, а первый и второй выходы соединены со входами соответственно первой 16 и второй 17 схем управления, а также первый 18 и второй 19 управляемые генераторы, выходы которых соединены со входами третьего коммутатора 11 и измерителя разности 20, выход которого соединен со вторым входом вычислительного устройства 13, третью 21 и четвертую 22 схемы управления, четвертый 23 и пятый 24 коммутаторы, регистр 25 знака подстройки, схему 26 совпадения и блок регистров сдвига 27, причем входы третьей 21 и четвертой 22 схем управления соединены соответственно с третьим и четвертым выходами распределителя 12 сигнала подстройки, а выходы - с первыми и вторыми информационными входами четвертого 23 и пятого 24 коммутаторов, третьи и четвертые информационные входы которых соединены с выходами соответственно первой 16 и второй 17 схем управления, первые управляющие входы соединены с третьим выходом распределителя тактов 10, вторые управляющие входы - с выходом вычислительного устройства 13, а выходы соединены со входами первого 18 и второго 19 управляемых генераторов, а кроме того первый вход регистра 25 знака подстройки соединен с выходом временного селектора 7 и первым входом схемы 26 совпадения, второй вход - с выходом формирователя сигнала величины подстройки 14, выход регистра 25 знака подстройки соединен со вторым входом схемы 26 совпадения, выход которой соединен с первым входом блока регистров 27 сдвига, второй вход которого соединен с шестым выходом распределителя 10 тактов, а выход соединен со вторым входом формирователя 14 сигнала величины подстройки, кроме того, первый и второй информационные входы/выходы устройства переключения каналов 3 подключены к приемоизлучающим преобразователям 1 и 2, третий и четвертый информационные входы/выходы подключены к первому 4 и второму 8 коммутаторам, а управляющий вход подключен к третьему выходу распределителя тактов 10, второй, управляющий вход которого соединен с выходом вычислительного устройства 13. Расходомер работает следующим образом. Цикл измерения содержит четыре такта - два такта измерения по потоку и два такта измерения против потока. В первом такте первый 4 и второй 8 коммутаторы переведены в режим измерения, например, по потоку, при этом зондирующий сигнал с выхода формирователя зондирующего сигнала 9 через второй коммутатор 8 и устройство переключения каналов 3 поступает на вход первого приемоизлучающего преобразователя 1, а прошедший через измеряемую среду сигнал принимается вторым приемоизлучающим преобразователем 2 и, пройдя через устройство переключения каналов 3 и второй вход первого коммутатора 4, усилитель 5 и амплитудный селектор 6, поступает на временной селектор 7. На второй вход временного селектора 7 поступает сигнал с первого управляемого генератора 18, прошедший через третий коммутатор 11 и поделенный делителем частоты 15 с коэффициентом деления k, задаваемым распределителем тактов 10. В зависимости от временного расположения этих двух сигналов на выходе временного селектора 7 формируется сигнал знака подстройки, который через формирователь сигнала величины подстройки 14, распределитель сигнала подстройки 12 поступает на первую схему управления 16, которая через четвертый коммутатор 23 изменяет частоту управляемого генератора 18 в ту или другую сторону в зависимости от знака подстройки. Во втором такте первый и второй коммутаторы переводятся в режим измерения против потока, при котором зондирующий сигнал поступает на вход второго преобразователя 2, а прошедший через среду сигнал принимается первым преобразователем 1, проходит через устройство переключения каналов 3, первый вход первого коммутатора 4, усилитель 5, амплитудный селектор 6 на временной селектор 7. На второй вход временного селектора 7 поступает сигнал с управляемого генератора 19 через коммутатор 11 и делитель частоты 15с коэффициентом деления k-m. На измерителе разности 20 формируется значение первой разностной частоты dft, которое поступает на вычислительное устройство 13. Подстройка в данном такте измерения проводится второй схемой управления 17, управляемой распределителем сигнала подстройки 12 от формирователя сигнала величины подстройки 14 в зависимости от знака подстройки, поступающего с временного селектора 7. В третьем такте измерения проводятся по потоку аналогично измерениям первого такта за исключением того, что сигнал, принятый приемоизлучающим преобразователем 2, поступает на первый вход коммутатора 4, первый управляемый генератор 18 управляется третьей схемой управления 21 через четвертый коммутатор 23, а делитель частоты 15 делит эту частоту с коэффициентом k-m. В четвертом такте измерения проводятся против потока аналогично измерениям второго такта, за исключением того, что принятый сигнал с преобразователя 1 поступает на второй вход коммутатора 4, при этом второй управляемый генератор 19 управляется четвертой схемой управления 22 через пятый коммутатор 24, а делитель частоты 15 делит частоту с коэффициентом k. На выходе измерителя разности 20 получается вторая разностная частота df2, подаваемая на вычислительное устройство 13. Вычислительным устройством 13 производится вычисление расхода Q по определенному алгоритму по величине разности двух разностных частот df = df1 - df2 в зависимости от коэффициентов делителя частоты k и m. Расход Q вычисляется по формуле (1). Переключение каналов в третьем и четвертом тактах измерения позволяет компенсировать разность задержек в электрических цепях расходомера, обеспечивая таким образом автоматическую компенсацию смещения "нуля", и, следовательно, повышение точности измерения, особенно при малых расходах. Наличие разных коэффициентов деления для управляемых генераторов приводит к смещению их рабочих частот друг относительно друга на величину fs = mf0/k, где f0 - частота генераторов при нулевом потоке, что исключает явление "захвата частот" при измерении малых расходов. Введение еще двух тактов работы обеспечивает работу с реверсивными потоками, причем изменение направления потока приводит к перемене знака разности частот и соответственно величины текущего расхода. Кроме того, введение дополнительных тактов работы позволяет вычислять суммарную частоту fs = df1 + df 2. которая характеризует размер акустической базы расходомера и параметры измеряемой среды и может быть использована для начальной поверки и калибровки расходомера, а также его периодической поверки, и для корректировки коэффициента преобразования в процессе работы в зависимости от изменения внешних факторов, что приводит к существенному подавлению их влияния, а, следовательно, и повышению точности измерения. Введение дополнительных схем управления и коммутаторов и дополнительных циклов измерения обеспечивает автоматическое вычитание сдвига частот, позволяет определять направление потока и дает информацию об изменении параметров среды, влияющих на точность измерения расхода. Для повышения точности измерения расхода для изменяющихся потоков служит схема динамической подстройки, включающая регистр знака подстройки 25, схему совпадения 26 и блок регистров сдвига 27. На 4-х разрядном регистре знака подстройки 25 по концу сигнала подстройки с формирователя сигнала величины подстройки 14 происходит запоминание знака прошедшей подстройки для данного такта измерения. В каждом текущем -такте измерения проводится сравнение знака текущей и предыдущей подстройки схемой совпадения 26. При совпадении знаков подстройки для данного такта измерения соответствующий регистр блока регистров сдвига 27 увеличивает код величины подстройки вдвое, а при несовпадении знаков - уменьшает вдвое, изменяясь от максимального к минимальному значению, что приводит к ускорению процесса перестройки управляемых генераторов при изменении скорости потока и в то же время обеспечивает малые величины изменения частоты при установившемся потоке. Это уменьшает случайную составляющую погрешности и увеличивает точность слежения за переменными потоками. Разрядность регистров сдвига определяет соотношение между величиной минимального и максимального значения подстройки и при 8-ми разрядном регистре это соотношение равно 128. Вычислительное устройство 13 анализирует измеряемую разность частот, поступающую с измерителя разности 20. При превышении этой разностью заданного значения, вычислительное устройство формирует на выходе управляющий сигнал, поступающий на вторые управляющие входы четвертого 23 и пятого 24 коммутаторов. При этом изменяется порядок прохождения сигналов управления со схем управления 16, 17, 21 и 22 на управляемые генераторы 18 и 19. В первом цикле измерения устройство работает с коэффициентом деления k, т.е. формируются частоты f1 и f4, а во втором цикле измерения устройство работает с коэффициентом деления k - m, т.е. формируются частоты f2 и f3. При этом и в первом и во втором циклах измерения получается разность частот без смещения, т.е. прямо зависящая от скорости потока среды, и используется вычислительным устройством для получения значения расхода. Такой переход позволяет существенно расширить диапазон измеряемых расходов в сторону больших расходов, сохранив при этом высокое разрешение в области малых расходов, что обеспечивает динамический диапазон измерений (тe..Qmax / Q min) не менее 1000. Схемы управления - это интеграторы на операционных усилителях. Распределитель сигнала подстройки четырехканальный коммутатор с кодовым управлением. Схема формирования величины подстройки - преобразователь кода в длительность импульса. Макетные образцы расходомера прошли испытания на расходомерной установке КБ "Южное" г. Днепропетровск, Украина. Полученные результаты показали, что заложенные принципы обеспечивают достижение результата. НПООО "Ультрасоникс" разработана конструкторская документация и изготовлены опытно-промышленные образцы. Расходомер подготовлен к проведению Государственных премочных испытаний и запуску в промышленное производство.
ДивитисяДодаткова інформація
Назва патенту англійськоюUltrasonic frequency-time flow rate meter
Автори англійськоюRomanov Anatolii Pylypovych, Shestakov Leonid Volodymyrovych, Mukharskyi Oleksandr Matviiovych, Puhachov Ihor Semenovych
Назва патенту російськоюУльтразвуковой частотно-временной расходомер
Автори російськоюРоманов Анатолий Филиппович, Шестаков Леонид Владимирович, Мухарский Александр Матвеевич, Пугачев Игорь Семенович
МПК / Мітки
МПК: G01F 1/66
Мітки: ультразвуковий, частотно-часовий, витратомір
Код посилання
<a href="https://ua.patents.su/5-17353-ultrazvukovijj-chastotno-chasovijj-vitratomir.html" target="_blank" rel="follow" title="База патентів України">Ультразвуковий частотно-часовий витратомір</a>
Ультразвуковий доплерівський витратомір
Номер патенту: 22920
Опубліковано: 05.05.1998
Автори: Близнюк В'ячеслав Іванович, Стеценко Андрій Анатолієвич, Стеценко Анатолій Іванович, Костильов Володимир Васильович, Сорокопут Валерій Леонідович
Мітки: витратомір, ультразвуковий, доплерівський
Формула / Реферат:
1. Ультразвуковой доплеровский расходомер, содержащий установленные с наружной стороны трубопровода излучающий и приемный ультразвуковые преобразователи, усилитель высокой частоты, вход которого соединен с выходом приемного преобразователя, запоминающее устройство, последовательно соединенные первый усилитель низкой частоты и первый триггер Шмитта, отличающийся тем, что дополнительно введены усилитель мощности, первый и второй смесители,...
Формувач цифрового частотно-модульованого сигналу
Номер патенту: 11896
Опубліковано: 25.12.1996
Автори: Гофайзен Олег Вікторович, Крюкова Тетяна Дмитрівна, Горьєв Сергій Адольфович
МПК: H04L 27/10
Мітки: цифрового, сигналу, частотно-модульованого, формувач
Формула / Реферат:
Формирователь цифрового частотно-модулированного сигнала, содержащий умножитель на весовой коэффициент, последовательно соединенные первый сумматор, блок вычисления синуса, первый перемножитель и второй сумматор, последовательно соединенные блок вычисления косинуса, вход которого соединен с выходом первого сумматора, и второй перемножитель, выход которого соединен с вторым входом второго сумматора, а также элемент задержки, который...
Демодулятор цифрового частотно-модульованого сигналу
Номер патенту: 11894
Опубліковано: 25.12.1996
Автори: Крюкова Тетяна Дмитрівна, Гофайзен Олег Вікторович, Горьєв Сергій Адольфович
МПК: H04N 9/66
Мітки: сигналу, цифрового, частотно-модульованого, демодулятор
Формула / Реферат:
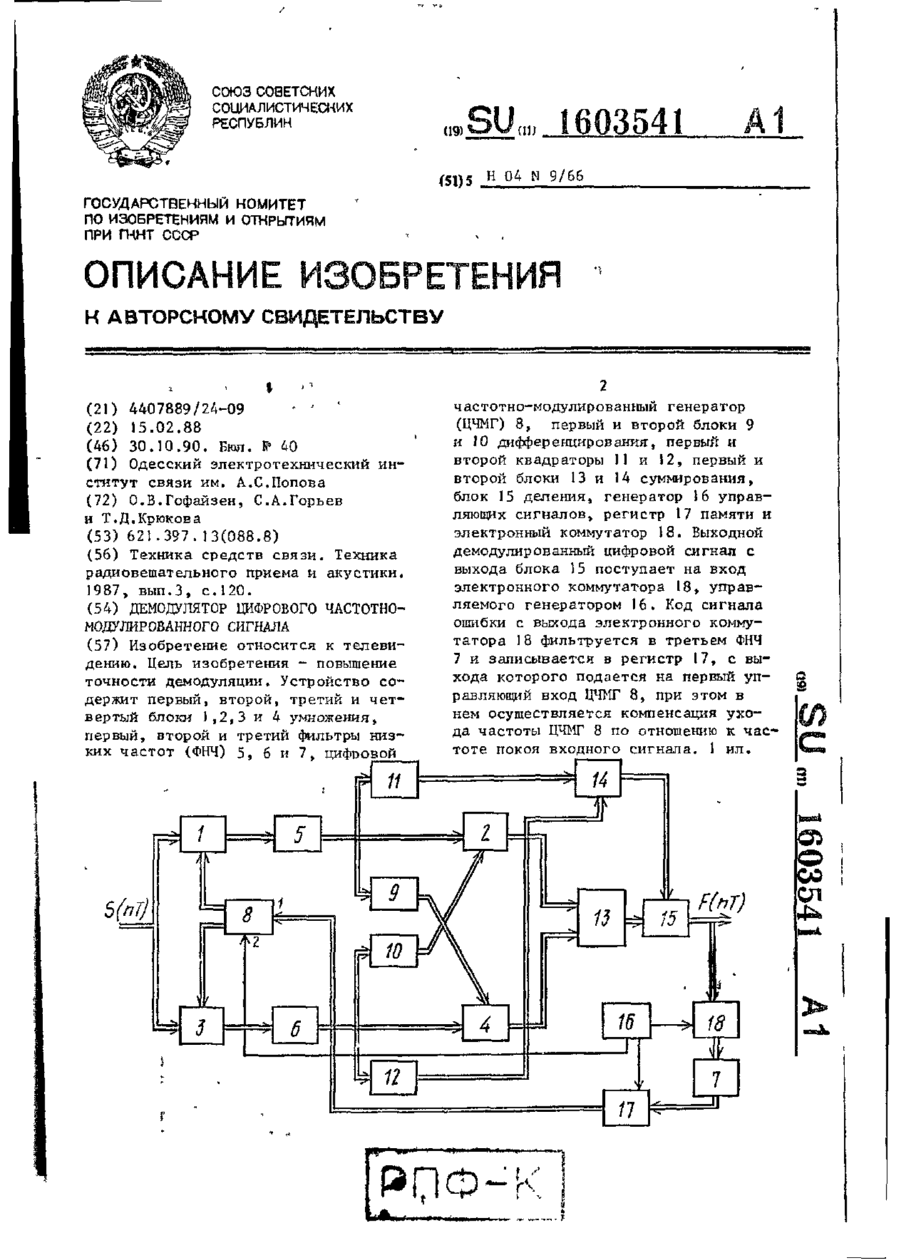
Демодулятор цифрового частотно-модулированного сигнала, содержащий последовательно соединенные первый блок умножения, первый фильтр низкой частоты <ФН Ч), второй блок умножения, первый блок суммирования и блок деления, выход которого является выходом устройства, а также последовательно соединенные третий блок умножения, второй ФНЧ и четвертый блок умножения, выход которого соединен с вторым входом первого блока суммирования, при этом...
Частотно-фазовий дискримінатор
Номер патенту: 5206
Опубліковано: 28.12.1994
Автори: Нейлюк Володимир Макарович, Таран Володимир Михайлович, Дейсман-Косіянчук Степан Петрович, Соколов Михайло Михайлович
МПК: H03D 13/00
Мітки: частотно-фазовий, дискримінатор
Формула / Реферат:
(57) Частотно-фазовый дискриминатор, содержащий первый и второй D-триггеры, D-входы которых соединены с нулевой шиной, а С-входы являются соответственно первыми вторым входами частотно-фазового дискриминатора, JK-триггер и первый и второй элементы И-НЕ, при этом первый вход первого элемента И-НЕ соединен с инверсным выходом первого D-триггера и J-bxoдом JK-триггера, второй вход соединен с прямым выходом JK-триггера и является вы ходом...
Пристрій для відтворення частотно-модульованних сигналів з носія магнітного запису
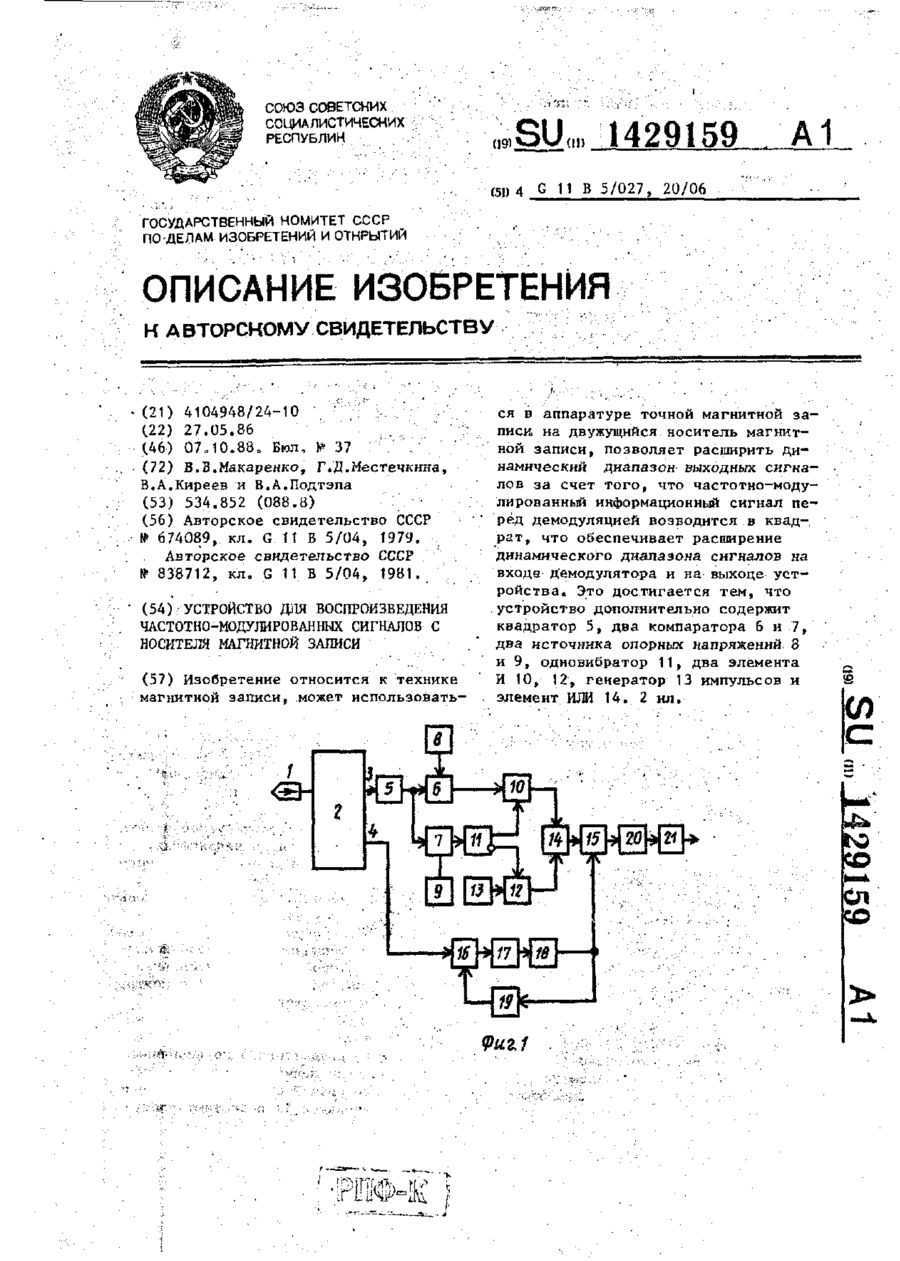
Номер патенту: 8883
Опубліковано: 30.09.1996
Автори: Местечкіна Галина Донівна, Подтепа Віктор Олексійович, Макаренко Володимир Васильович, Кірєєв Володимир Олександрович
МПК: G11B 5/027, G11B 20/06
Мітки: запису, магнітного, відтворення, носія, сигналів, частотно-модульованних, пристрій
Формула / Реферат:
Устройство для воспроизведения частотно-модулированных сигналов с носителя магнитной записи, содержащее воспроизводящую магнитную головку, подключенную к разделителю каналов с выходами информационного и опорного сигналов, а также подключенные к выходу опорного сигнала разделителя каналов и последовательно соединенные фазовый детектор, фильтр нижних частот, генератор, управляемый напряжением, связанный с управляющим входом регистра сдвига,...
Попередній патент: Мастильна композиція для обробки металів едоксом-2м
Наступний патент: Сільськогосподарський агрегат
Випадковий патент: Спосіб нанесення нікелю