Транспортний модуль
Формула / Реферат
1. Транспортный модуль, содержащий основание с направляющими и помещенную между ними с гарантированным зазором каретку, снабженную установочным элементом для объектов производства, отличающийся тем, что на внутренних поверхностях направляющих закреплены по всей длине стержневые постоянные магниты, плоскость расположения которых находится над плоскостью расположения обращенных к ним одноименных полюсов магнитов, закрепленных на каретке, в основании которой выполнены отверстия для подвода сжатого воздуха, причем одно из отверстий расположено в центре каретки, а два других в той же плоскости возле ее концов.
2. Транспортный модуль по п. 1, отличающийся тем, что каретка снабжена реактивными соплами, размещенными по ее концам в плоскости перемещения. а на обращенных к направляющим сторонах выполнены рифли.
3. Транспортный модуль по п. 1, отличающийся тем, что в направляющих выполнены каналы для подвода сжатого воздуха, образующие с поверхностями рифлей угол 90°.
Текст
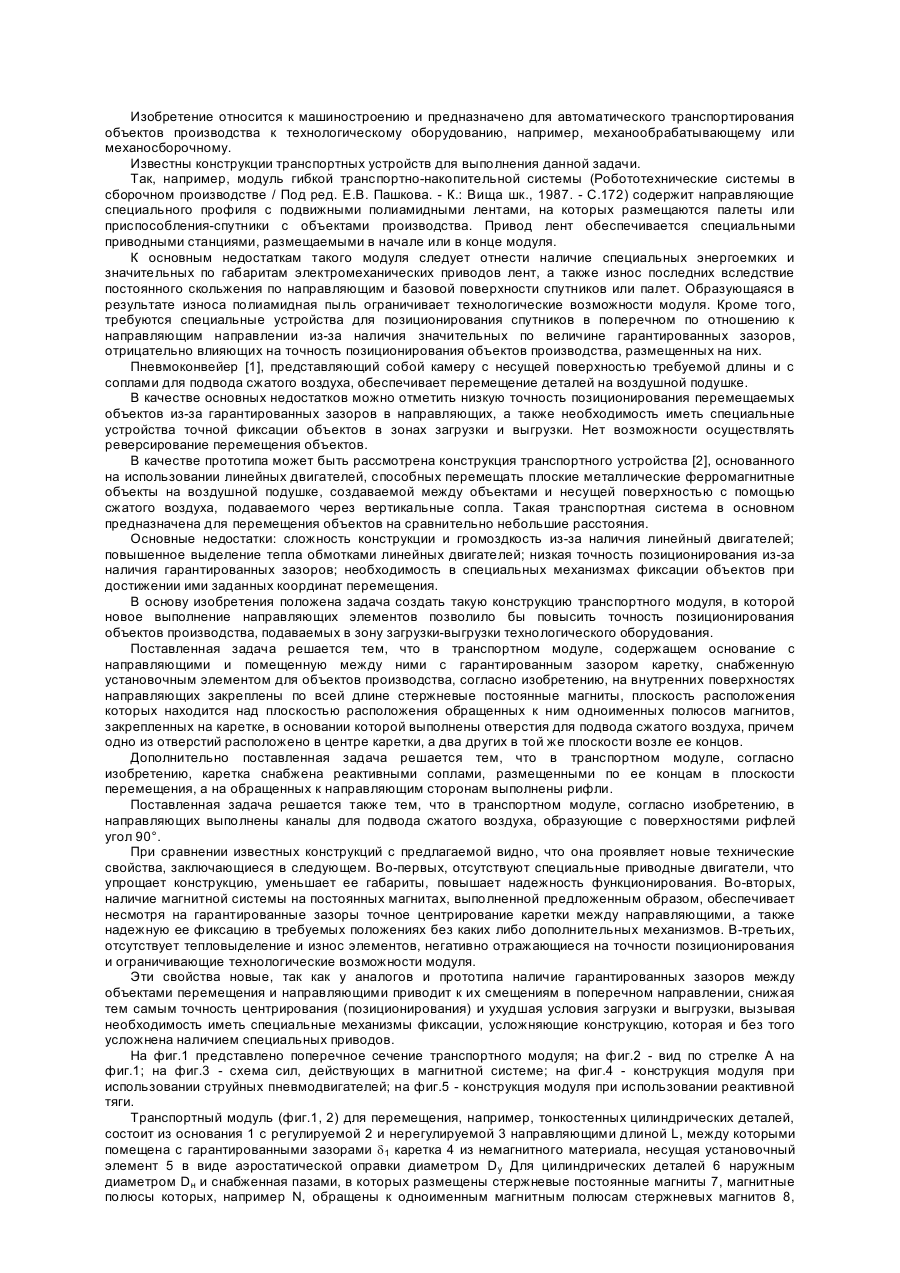
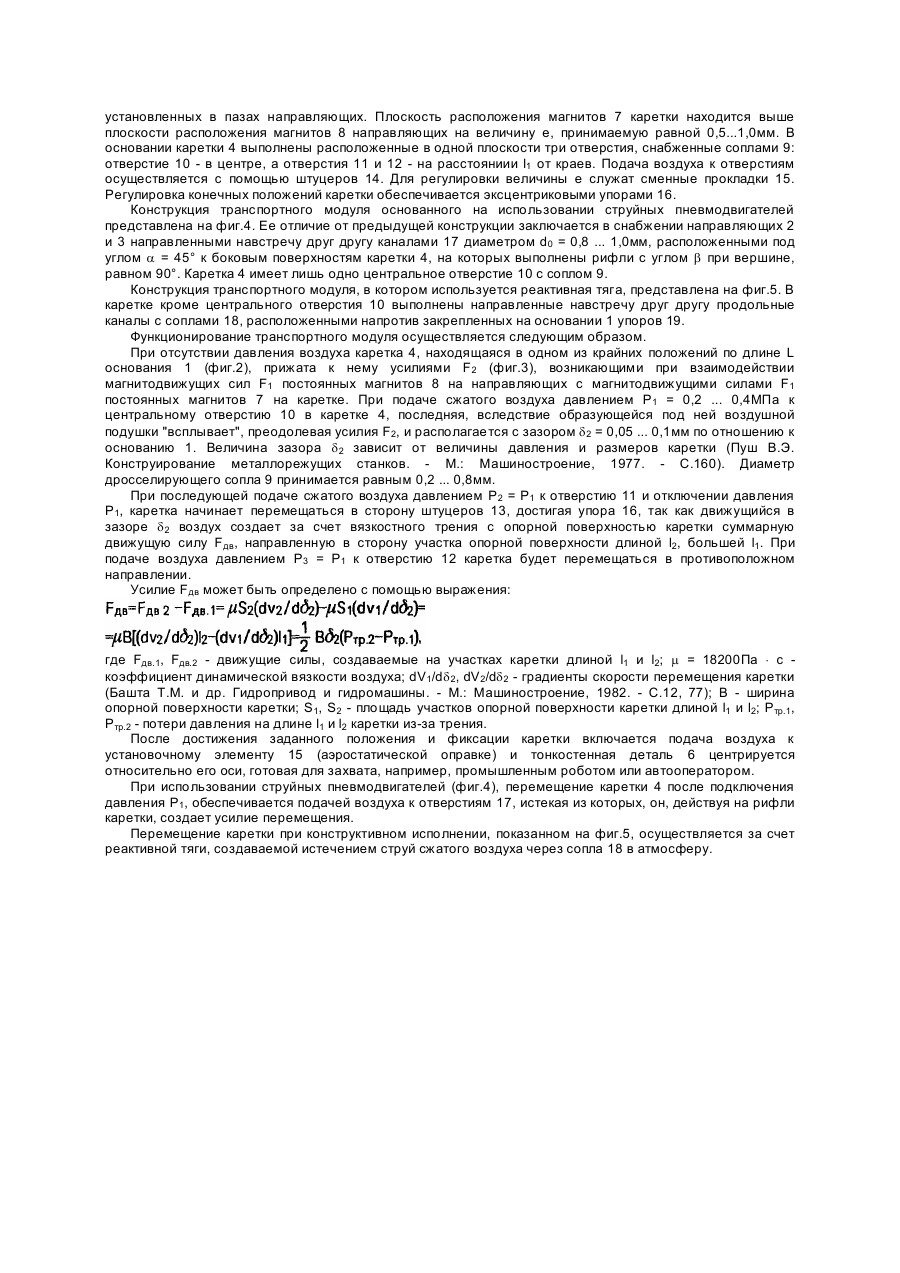
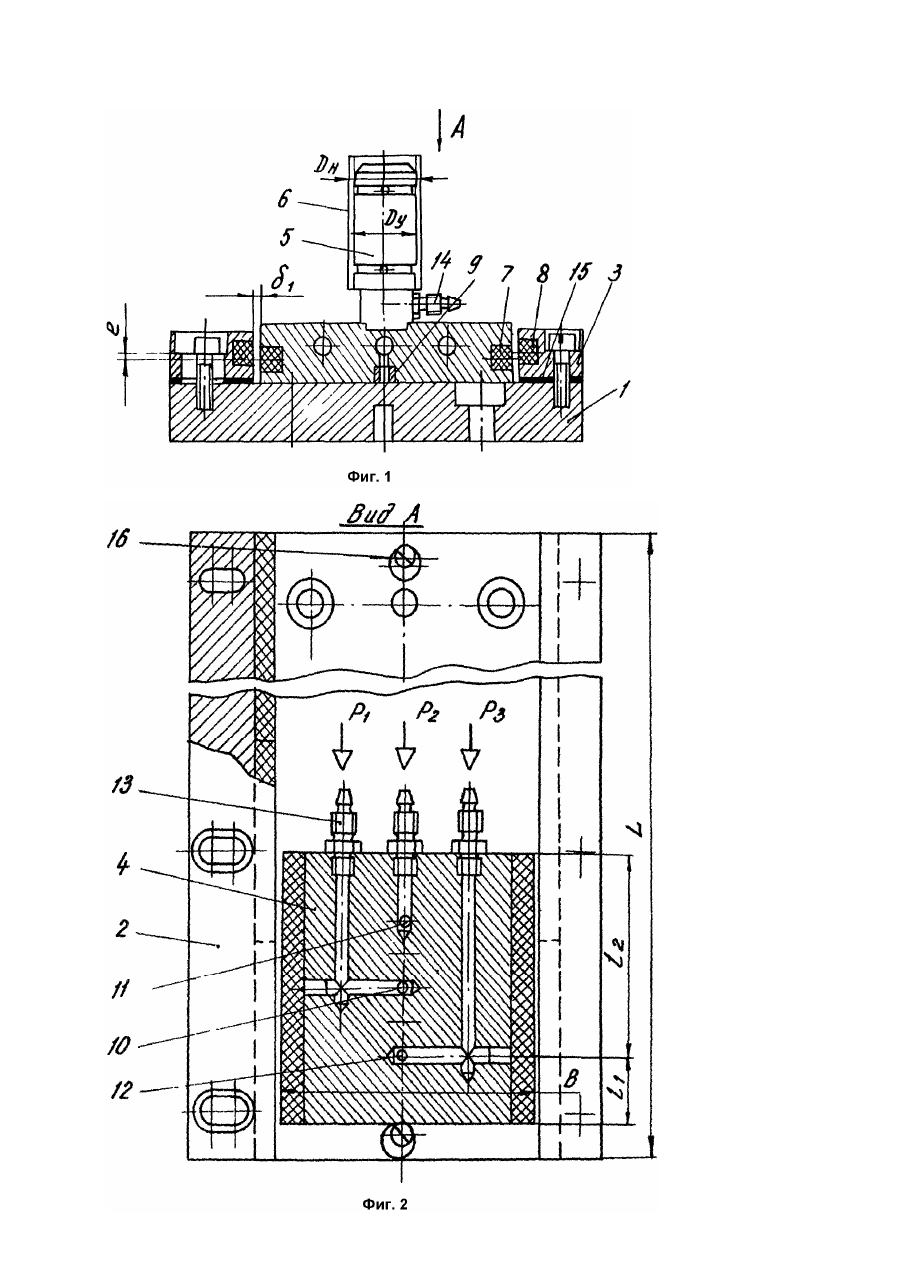
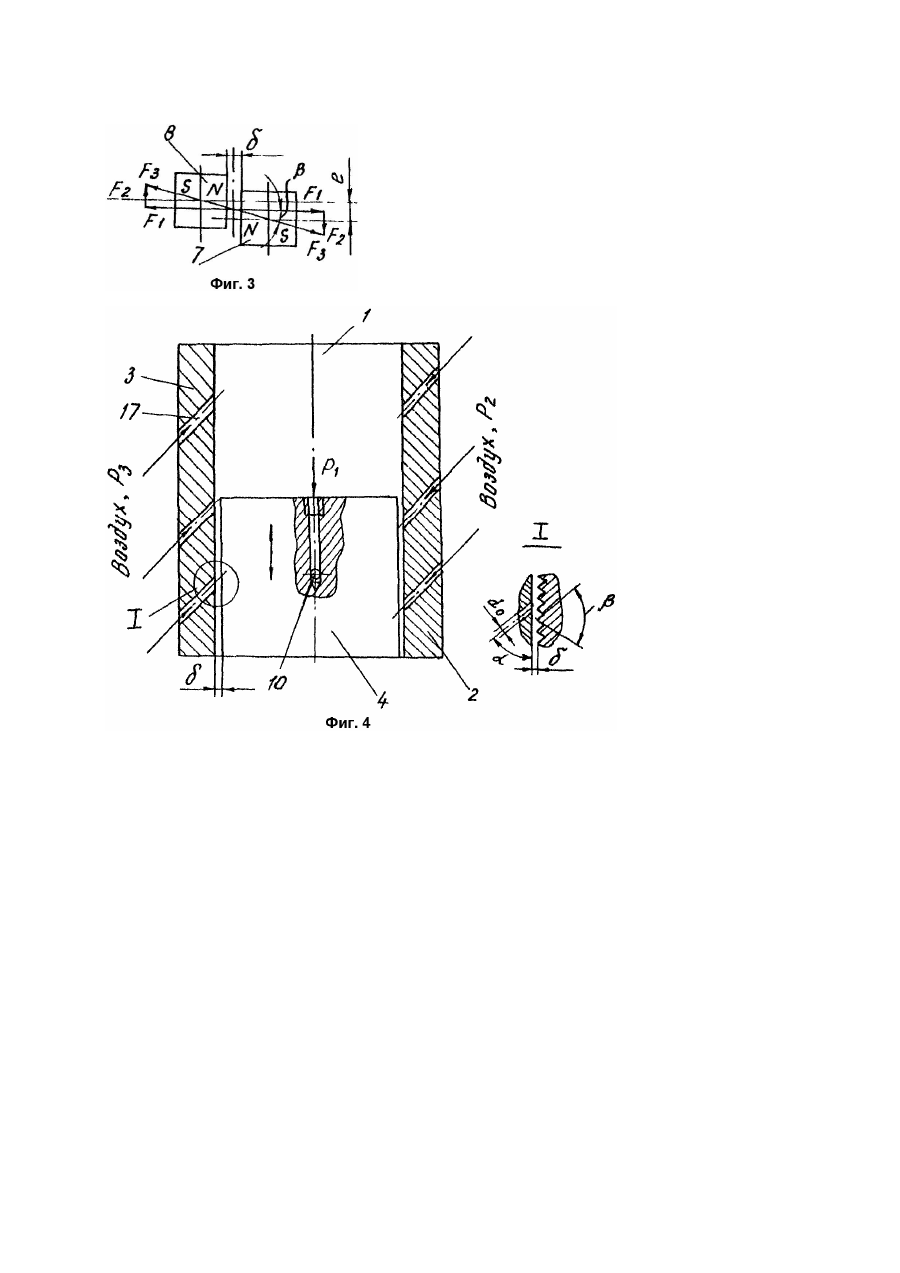
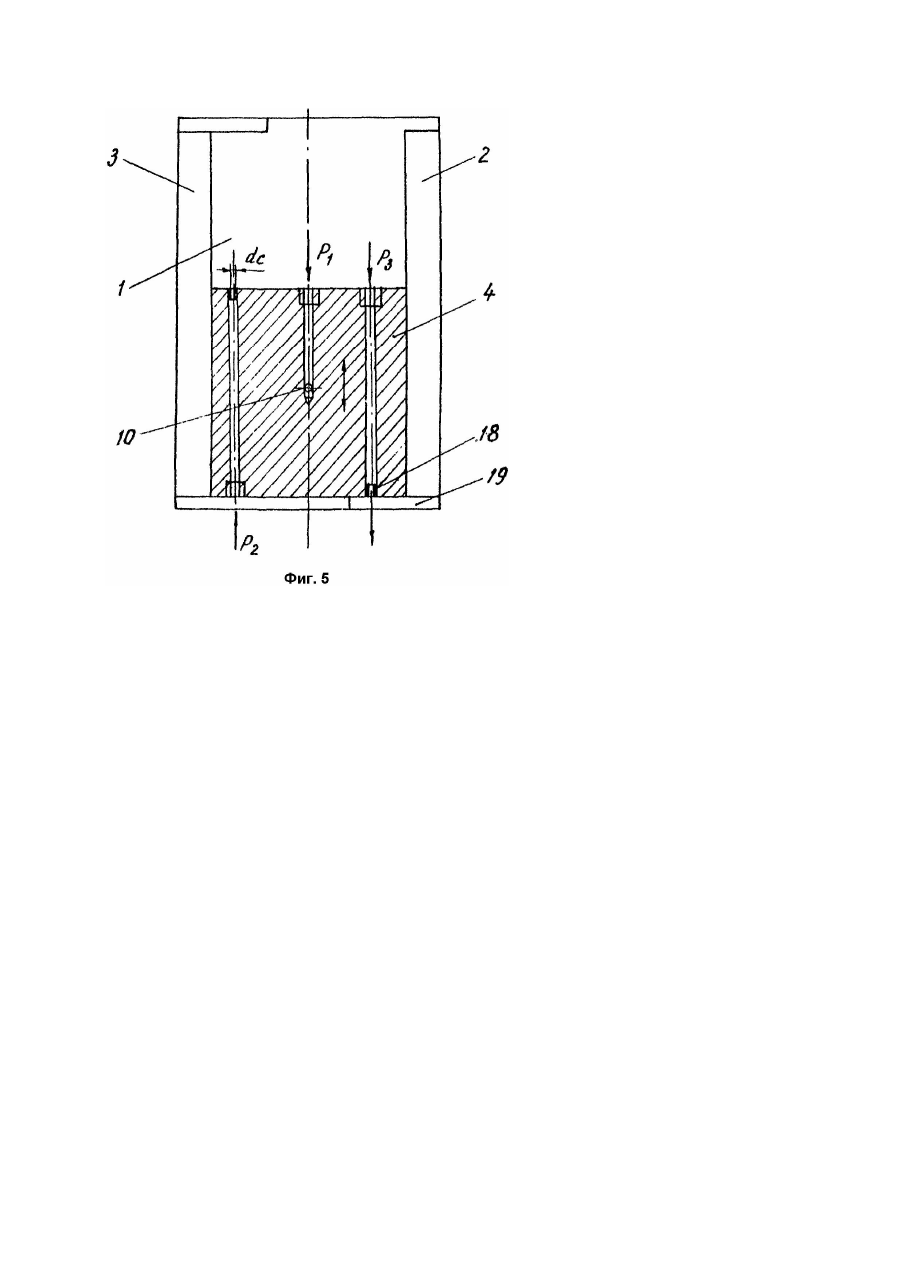
Изобретение относится к машиностроению и предназначено для автоматического транспортирования объектов производства к технологическому оборудованию, например, механообрабатывающему или механосборочному. Известны конструкции транспортных устройств для выполнения данной задачи. Так, например, модуль гибкой транспортно-накопительной системы (Робототехнические системы в сборочном производстве / Под ред. Е.В. Пашкова. - К.: Вища шк., 1987. - С.172) содержит направляющие специального профиля с подвижными полиамидными лентами, на которых размещаются палеты или приспособления-спутники с объектами производства. Привод лент обеспечивается специальными приводными станциями, размещаемыми в начале или в конце модуля. К основным недостаткам такого модуля следует отнести наличие специальных энергоемких и значительных по габаритам электромеханических приводов лент, а также износ последних вследствие постоянного скольжения по направляющим и базовой поверхности спутников или палет. Образующаяся в результате износа полиамидная пыль ограничивает технологические возможности модуля. Кроме того, требуются специальные устройства для позиционирования спутников в поперечном по отношению к направляющим направлении из-за наличия значительных по величине гарантированных зазоров, отрицательно влияющих на точность позиционирования объектов производства, размещенных на них. Пневмоконвейер [1], представляющий собой камеру с несущей поверхностью требуемой длины и с соплами для подвода сжатого воздуха, обеспечивает перемещение деталей на воздушной подушке. В качестве основных недостатков можно отметить низкую точность позиционирования перемещаемых объектов из-за гарантированных зазоров в направляющих, а также необходимость иметь специальные устройства точной фиксации объектов в зонах загрузки и выгрузки. Нет возможности осуществлять реверсирование перемещения объектов. В качестве прототипа может быть рассмотрена конструкция транспортного устройства [2], основанного на использовании линейных двигателей, способных перемещать плоские металлические ферромагнитные объекты на воздушной подушке, создаваемой между объектами и несущей поверхностью с помощью сжатого воздуха, подаваемого через вертикальные сопла. Такая транспортная система в основном предназначена для перемещения объектов на сравнительно небольшие расстояния. Основные недостатки: сложность конструкции и громоздкость из-за наличия линейный двигателей; повышенное выделение тепла обмотками линейных двигателей; низкая точность позиционирования из-за наличия гарантированных зазоров; необходимость в специальных механизмах фиксации объектов при достижении ими заданных координат перемещения. В основу изобретения положена задача создать такую конструкцию транспортного модуля, в которой новое выполнение направляющих элементов позволило бы повысить точность позиционирования объектов производства, подаваемых в зону загрузки-выгрузки технологического оборудования. Поставленная задача решается тем, что в транспортном модуле, содержащем основание с направляющими и помещенную между ними с гарантированным зазором каретку, снабженную установочным элементом для объектов производства, согласно изобретению, на внутренних поверхностях направляющих закреплены по всей длине стержневые постоянные магниты, плоскость расположения которых находится над плоскостью расположения обращенных к ним одноименных полюсов магнитов, закрепленных на каретке, в основании которой выполнены отверстия для подвода сжатого воздуха, причем одно из отверстий расположено в центре каретки, а два других в той же плоскости возле ее концов. Дополнительно поставленная задача решается тем, что в транспортном модуле, согласно изобретению, каретка снабжена реактивными соплами, размещенными по ее концам в плоскости перемещения, а на обращенных к направляющим сторонам выполнены рифли. Поставленная задача решается также тем, что в транспортном модуле, согласно изобретению, в направляющих выполнены каналы для подвода сжатого воздуха, образующие с поверхностями рифлей угол 90°. При сравнении известных конструкций с предлагаемой видно, что она проявляет новые технические свойства, заключающиеся в следующем. Во-первых, отсутствуют специальные приводные двигатели, что упрощает конструкцию, уменьшает ее габариты, повышает надежность функционирования. Во-вторых, наличие магнитной системы на постоянных магнитах, выполненной предложенным образом, обеспечивает несмотря на гарантированные зазоры точное центрирование каретки между направляющими, а также надежную ее фиксацию в требуемых положениях без каких либо дополнительных механизмов. В-третьих, отсутствует тепловыделение и износ элементов, негативно отражающиеся на точности позиционирования и ограничивающие технологические возможности модуля. Эти свойства новые, так как у аналогов и прототипа наличие гарантированных зазоров между объектами перемещения и направляющими приводит к их смещениям в поперечном направлении, снижая тем самым точность центрирования (позиционирования) и ухудшая условия загрузки и выгрузки, вызывая необходимость иметь специальные механизмы фиксации, усложняющие конструкцию, которая и без того усложнена наличием специальных приводов. На фиг.1 представлено поперечное сечение транспортного модуля; на фиг.2 - вид по стрелке A на фиг.1; на фиг.3 - схема сил, действующих в магнитной системе; на фиг.4 - конструкция модуля при использовании струйных пневмодвигателей; на фиг.5 - конструкция модуля при использовании реактивной тяги. Транспортный модуль (фиг.1, 2) для перемещения, например, тонкостенных цилиндрических деталей, состоит из основания 1 с регулируемой 2 и нерегулируемой 3 направляющими длиной L, между которыми помещена с гарантированными зазорами d 1 каретка 4 из немагнитного материала, несущая установочный элемент 5 в виде аэростатической оправки диаметром Dу Для цилиндрических деталей 6 наружным диаметром Dн и снабженная пазами, в которых размещены стержневые постоянные магниты 7, магнитные полюсы которых, например N, обращены к одноименным магнитным полюсам стержневых магнитов 8, установленных в пазах направляющих. Плоскость расположения магнитов 7 каретки находится выше плоскости расположения магнитов 8 направляющих на величину e, принимаемую равной 0,5...1,0мм. В основании каретки 4 выполнены расположенные в одной плоскости три отверстия, снабженные соплами 9: отверстие 10 - в центре, а отверстия 11 и 12 - на расстояниии l1 от краев. Подача воздуха к отверстиям осуществляется с помощью штуцеров 14. Для регулировки величины e служат сменные прокладки 15. Регулировка конечных положений каретки обеспечивается эксцентриковыми упорами 16. Конструкция транспортного модуля основанного на использовании струйных пневмодвигателей представлена на фиг.4. Ее отличие от предыдущей конструкции заключается в снабжении направляющих 2 и 3 направленными навстречу друг другу каналами 17 диаметром d0 = 0,8 ... 1,0мм, расположенными под углом a = 45° к боковым поверхностям каретки 4, на которых выполнены рифли с углом b при вершине, равном 90°. Каретка 4 имеет лишь одно центральное отверстие 10 с соплом 9. Конструкция транспортного модуля, в котором используется реактивная тяга, представлена на фиг.5. В каретке кроме центрального отверстия 10 выполнены направленные навстречу друг другу продольные каналы с соплами 18, расположенными напротив закрепленных на основании 1 упоров 19. Функционирование транспортного модуля осуществляется следующим образом. При отсутствии давления воздуха каретка 4, находящаяся в одном из крайних положений по длине L основания 1 (фиг.2), прижата к нему усилиями F2 (фиг.3), возникающими при взаимодействии магнитодвижущих сил F1 постоянных магнитов 8 на направляющих с магнитодвижущими силами F1 постоянных магнитов 7 на каретке. При подаче сжатого воздуха давлением P1 = 0,2 ... 0,4МПа к центральному отверстию 10 в каретке 4, последняя, вследствие образующейся под ней воздушной подушки "всплывает", преодолевая усилия F2, и располагается с зазором d 2 = 0,05 ... 0,1мм по отношению к основанию 1. Величина зазора d 2 зависит от величины давления и размеров каретки (Пуш В.Э. Конструирование металлорежущих станков. - М.: Машиностроение, 1977. - С.160). Диаметр дросселирующего сопла 9 принимается равным 0,2 ... 0,8мм. При последующей подаче сжатого воздуха давлением P2 = P1 к отверстию 11 и отключении давления P1, каретка начинает перемещаться в сторону штуцеров 13, достигая упора 16, так как движущийся в зазоре d 2 воздух создает за счет вязкостного трения с опорной поверхностью каретки суммарную движущую силу Fдв, направленную в сторону участка опорной поверхности длиной l2, большей l1. При подаче воздуха давлением P3 = P1 к отверстию 12 каретка будет перемещаться в противоположном направлении. Усилие Fдв может быть определено с помощью выражения: где Fдв.1, Fдв.2 - движущие силы, создаваемые на участках каретки длиной l1 и l2; m = 18200Па × c коэффициент динамической вязкости воздуха; dV1/dd 2, dV 2/dd 2 - градиенты скорости перемещения каретки (Башта Т.М. и др. Гидропривод и гидромашины. - М.: Машиностроение, 1982. - С.12, 77); B - ширина опорной поверхности каретки; S1, S2 - площадь участков опорной поверхности каретки длиной l1 и l2; Pтр.1, Pтр.2 - потери давления на длине l1 и l2 каретки из-за трения. После достижения заданного положения и фиксации каретки включается подача воздуха к установочному элементу 15 (аэростатической оправке) и тонкостенная деталь 6 центрируется относительно его оси, готовая для захвата, например, промышленным роботом или автооператором. При использовании струйных пневмодвигателей (фиг.4), перемещение каретки 4 после подключения давления P1, обеспечивается подачей воздуха к отверстиям 17, истекая из которых, он, действуя на рифли каретки, создает усилие перемещения. Перемещение каретки при конструктивном исполнении, показанном на фиг.5, осуществляется за счет реактивной тяги, создаваемой истечением струй сжатого воздуха через сопла 18 в атмосферу.
ДивитисяДодаткова інформація
Назва патенту англійськоюTransport module
Автори англійськоюPashkov Yevhen Valentynovych
Назва патенту російськоюТранспортный модуль
Автори російськоюПашков Евгений Валентинович
МПК / Мітки
МПК: B65G 25/04, B23Q 7/16
Мітки: модуль, транспортний
Код посилання
<a href="https://ua.patents.su/5-22074-transportnijj-modul.html" target="_blank" rel="follow" title="База патентів України">Транспортний модуль</a>
Базовий модуль деревообробного верстата
Номер патенту: 1290
Опубліковано: 30.12.1993
Автор: Сергєєв Михайло Михайлович
МПК: B27C 9/00
Мітки: верстата, базовий, деревообробного, модуль
Формула / Реферат:
Базовый модуль деревообрабатывающего станка, включающий станину, шпиндель и привод, отличающийся тем, что станина выполнена с горизонтально расположенными направляющими, а модуль снабжен рамой с вертикальными стойками и траверсой, причем рама имеет элементы крепления наладок станка и установлена на горизонтальных направляющих с возможностью ее переустановки в вертикальных стойках рамы, в плоскости перпендикулярной оси шпинделя смонтированы...
Модуль н.м.лефлера секційного вулика пасічного павільйону
Номер патенту: 8493
Опубліковано: 30.09.1996
Автор: Лефлер Наум Михайлович
МПК: A01K 47/00
Мітки: павільйону, пасічного, модуль, н.м.лефлера, вулика, секційного
Формула / Реферат:
Модуль секционного улья пасечного павильона, содержащий вертикальные перегородки с Г-образными направляющими для выдвижных кассет и задние стенки, отличающийся тем, что, с целью повышения сохранности и продуктивности пчелосемей при перегруппировке за счет изменения межъярусных зазоров, на вертикальных полках направляющих выполнены вертикальные прорези со смещенными по высоте одно относительно другого и противоположно направленными...
Підлоговий чотирьохколісний транспортний засіб

Номер патенту: 2507
Опубліковано: 26.12.1994
Автори: Кохан Іван Михайлович, Субботін Юрій Петрович, Шнейдер Володимир Львович, Самонін Анатолій Васильович, Гренадер Михайло Юхимович, Володарський Віктор Тимофійович
МПК: B62D 7/14
Мітки: засіб, чотирьохколісний, транспортний, підлоговий
Формула / Реферат:
1. Напольное четырехколесное транспортное средство, содержащее все управляемые колеса, кинематически попарно связанные между собой, по крайней мере, два из которых ведущие, блок управления с переключателем направления движения, связанный через исполнительный механизм с каждой парой управляемых колес, и элементы согласования поворота управляемых колес разных пар, отличающийся тем, что между собой попарно связаны управляемые колеса одного...
Транспортний засіб типу “самоскид”
Номер патенту: 13215
Опубліковано: 28.02.1997
Автор: Бернар Гійом
МПК: B60P 1/04
Мітки: транспортний, засіб, самоскид, типу
Формула / Реферат:
(57) 1. Транспортное средство типа "самосвал", содержащее шасси, установленный на нем опрокидывающийся от привода кузов выполненный с криволинейными в поперечном сечении стенками, параллельными обращенным к ним элементам рамы для охвата нижней части кузова, отличающееся тем, что кузов установлен с возможностью опрокидывания назад, а стенки кузова, охватываемые рамой, расположены с возможностью взаимодействия с указанными элементами...
Пристрій для укладання гнучких магістралей виімкових машин

Номер патенту: 11911
Опубліковано: 25.12.1996
Автори: Літвінов Георгій Олексійович, Ільїчов Борис Михайлович, Мельников Вячеслав Афанасійович, Арутюнян Сурен Михайлович, Козлов Олексій Володимирович
МПК: E21F 17/04
Мітки: машин, гнучких, укладання, пристрій, магістралей, виімкових
Формула / Реферат:
Устройство для укладки гибких магистралей выемочных машин, включающее желоб, траковую цепь с расположенными в ней гибкими магистралями, одним концом присоединенными к выемочной машине, каретку с роликом, огибаемым траковой цепью, и барабан лебедки, отличающееся тем, что, с целью повышения надежности работы за счет предотвращения заклинивании каретки при подштыбовке траковой цепи и уменьшения трудоемкости работ по зачистке желоба, желоб...
Попередній патент: Кормова добавка для свиней
Наступний патент: Захватно-транспортний пристрій для тонкостінних циліндричних деталей
Випадковий патент: Імунотропний ліпосомальний препарат "ковісцин"