Спосіб управління приводними ланками шестиступеневого динамічного стенда опорного типу при формуванні кутових переміщень платформи
Номер патенту: 23144
Опубліковано: 30.06.1998
Автори: Сотников Дмитро Олексійович, Кабанячий Володимир Володимирович
Формула / Реферат
Способ управления приводными звеньями шестистепенного динамического стенда опорного типа при формировании угловых перемещений платформы, заключающийся в том, что перемещением приводных звеньев задают угловые движения платформы динамического стенда относительно трех взаимоперпендикулярных осей вращения, отличающийся тем, что задают положение оси вращения по углу крена в поперечном направлении, а положения осей вращения по углам тангажа и рыскания - в продольном направлении таким образом, чтобы обеспечить совместные максимальные угловые перемещения платформы по крену и тангажу, при этом координаты положения осей вращения по углам тангажа и рыскания задают в продольном отрицательном направлении максимальными и не приводящими к уменьшению диапазона совместных угловых перемещений.
Текст
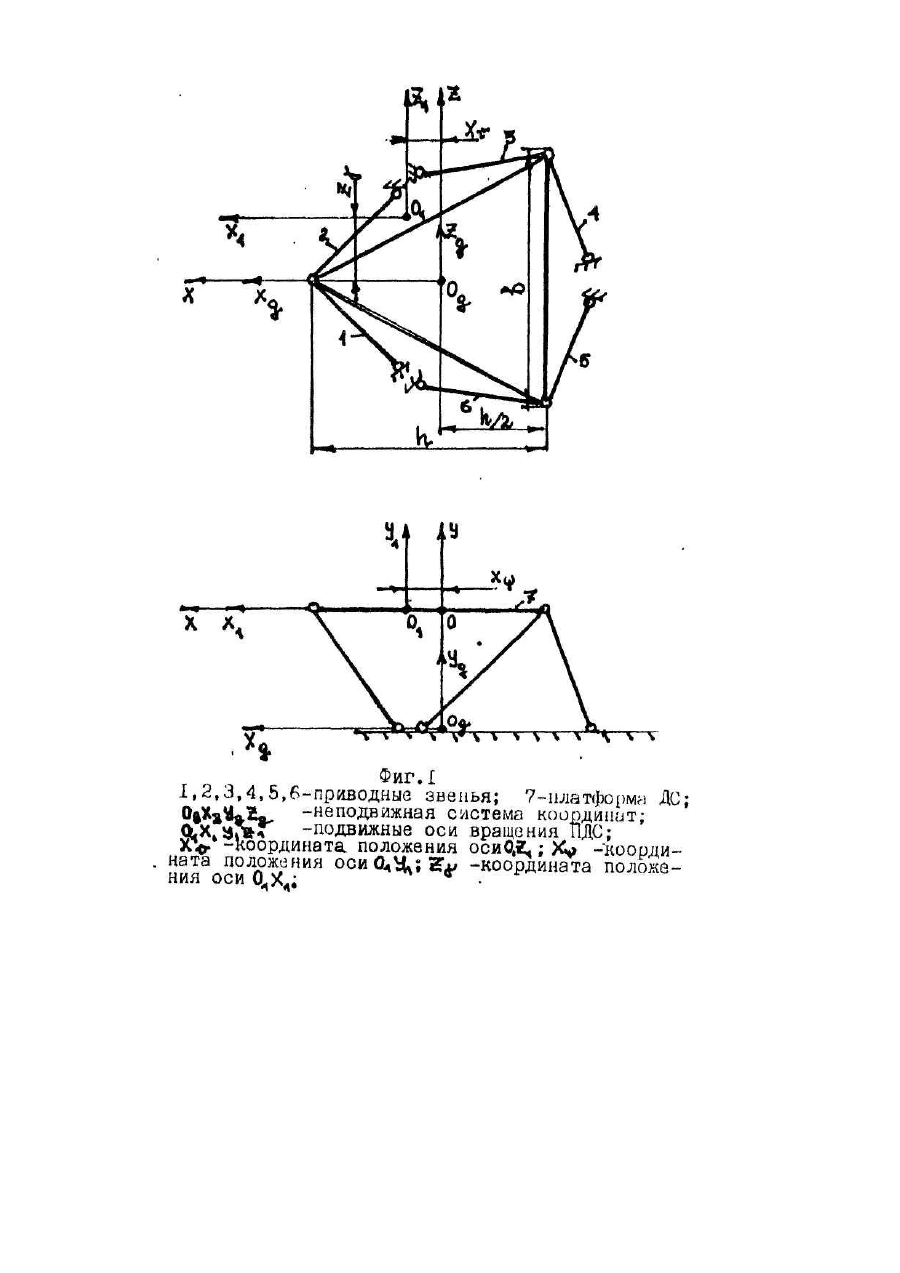
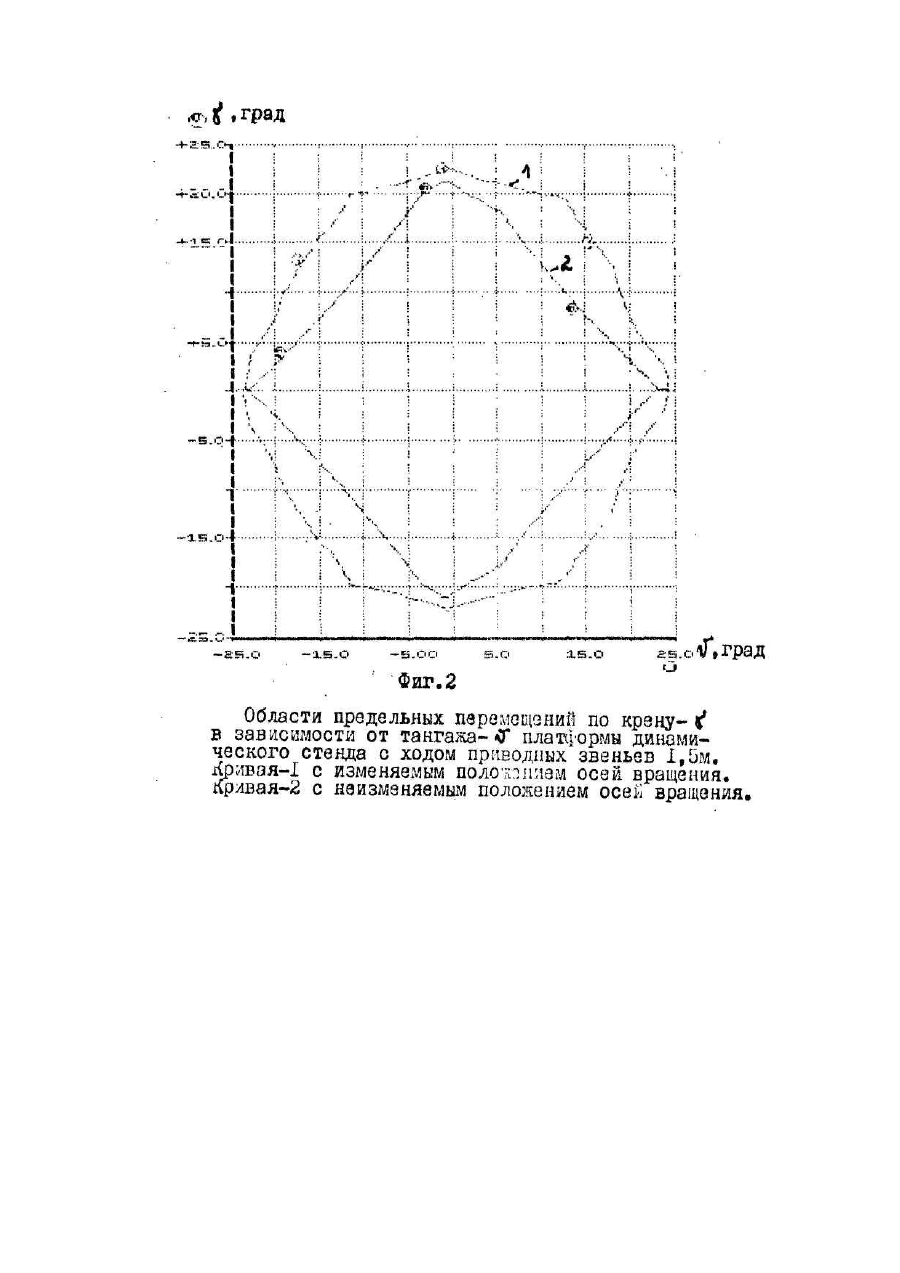
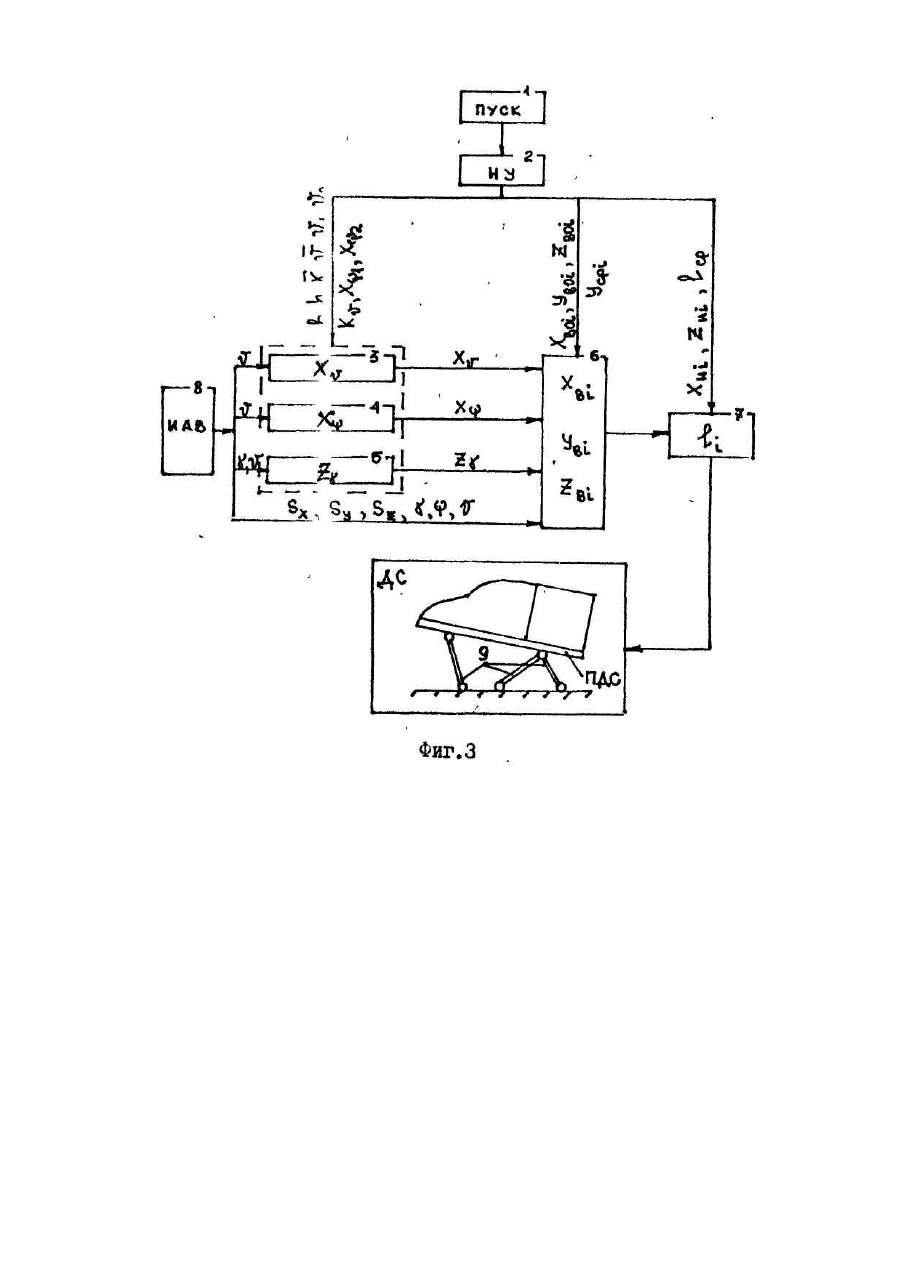
Изобретение относится к области авиационной и космической техники, а именно: к способам управления приводными звеньями (ПЗ) шестистепенного динамического стенда (ДС) в составе имитатора акселерационных воздействий авиационного тренажера, Известен один способ управления ПЗ, ДС, который и является наиболее близким к предлагаемому изобретению по технической сущности, заключающийся в том, что перемещением ПЗ задают угловые перемещения платформы динамического стенда (ПДС) относительно трех взаимоперпендикулярных осей координат OXYZ (фиг.1), по крену, тангажу и рысканию. Разработать способы имитации движения ЛА в отказных ситуациях на авиационных тренажерах с системой подвижности (Киевский международный университет гражд. авиации: Руков. Д.А. Сотников. N ГР. 0193ИО43517; инв. № 039И012761 М., 1993, с.88, ил. 11]. Недостатком этого способа является неоптимальное использование располагаемых ходов (РХ) ПЗ при совместном угловом перемещении ПДС относительно трех осей. Для расширения диапазона перемещений создают ДС с большими РХ, что, в свою очередь, приводит к значительному росту стоимости ДС, т.к. цена растет пропорционально кубу отношения максимальных длин ПЗ и в настоящее время достигает, например, при РХ ПЗ равном 1,5 м двух миллионов долларов США. Совершенствование способов управления позволяет достигать высоких качеств имитации акселерационных воздействий (AB) при меньших ходах ПЗ. Этим объясняется постоянное стремление создавать более эффективные способы имитации AB и управления ДС. Рассматриваемая задача представляет особый интерес при имитации AB на критических режимах движения летательного аппарата (ЛА), в частности, на режиме сваливания и движения в штопоре. Актуальность имитации этого режима возникла в связи с происшедшими в последнее время катастрофами самолетов по вине экипажей, которые не смогли вывести самолет из штопора из-за отсутствия навыков пилотирования самолета в режиме штопора. Одной из причин отсутствия достоверной имитации режима штопора на авиационных тренажерах является несовершенство управления ДС. В основу изобретения поставлена задача усовершенствования способа управления ПЗ шестистепенного ДС при формировании совместных угловых перемещений ПДС, в котором задают положение оси вращения по углу крена в поперечном направлении, а положения осей вращения по углам тангажа и рыскания - в продольном направлении, при этом координаты положения осей вращения по углам тангажа и рыскания задают в продольном отрицательном направлении максимальными и не приводящими к уменьшению совместных угловых перемещений, чем обеспечивается совместное максимальное перемещение ПДС по крену и тангажу и за счет этого расширяется число имитируемых режимов движения ЛА с помощью ДС. Поставленная задача решается тем, что в ДС перемещением ПЗ создают угловые движения ПДС относительно трех взаимоперпендикулярных осей вращения согласно с изобретением задают положение оси вращения по углу крена в поперечном направлении, а положения осей вращения по углам тангажа и рыскания - в продольном направлении таким образом, чтобы обеспечить совместные максимальные угловые перемещения ПДС по крену и тангажу, при этом координаты положения осей вращения по углам тангажа и рыскания задают в продольном отрицательном направлении максимальными и приводящими к уменьшению диапазона совместных угловых перемещений. Управление ПЗ с изменяемым положением осей вращения позволяет существенно расширить диапазоны совместных угловых перемещений ПДС. На фиг.1 представлена схема ПЗ ДС; на фиг.2 - области предельных напряжений по крену ПДС с изменяемым положением осей вращения (кривая 1) и с не изменяемым положением осей вращения (кривая 2); на фиг.3 - блок-схема устройства, реализующего способ, состоящая из блока пуска 1, вычислителей 2, 3, 4, 5, 6, 7, вычислителя имитатора акселерационных воздействий (ИАВ)8, ПЗ ДС 9. Сущность способа управления ПЗ заключается в следующем. Линейные перемещения т. O1 (мгновенного центра вращения ПДС)(фиг.1) в неподвижной системе координат OgYgZg: продольное - вдоль оси OgXg - Sx, вертикальное - вдоль оси OgYg - Sy, поперечное - вдоль оси OgZg - Sz; угловые перемещения ПДС: крена относительно оси O1X1 - g, рыскания относительно оси O1X1 -j, тангажа относительно оси O1Z1 - n, осуществляется за счет изменения длин ПЗ, которые определяются по формулам где j - номер ПЗ, j = 1,6, XHj, ZHj - координаты центров вращения нижних шарниров ПЗ: Xвj, Yвj, Zвj - изменения координат центров вращения верхних шарниров ПЗ, рассчитываемые по формулам где Xвoj, Yвoj, Zвoj - координаты центров вращения верхних шарниров в системе координат OXYZ; Yср - расстояние между центрами вращения нижних и верхних шарниров вдоль оси OgYg при рабочем ходе ПЗ равном lср; Zg - координата положения оси O1X1 вдоль оси OZ относительно точки 0, определяемая по формуле где b, g, J - параметры, зависящие от максимального хода ПЗ. Для ПЗ с ходом 1,5 м b=4,12м, g = 20о, J =24°, x J - координата положения оси O Z вдоль оси ОХ относительно точки О, определяемая по формуле 1 1 где K J , h, J1, J2 - параметры, зависящие от максимального хода ПЗ. Для ПЗ с ходом 1,5 м K J = 0,14, h = 3,572 м, J1 = 12°, J2 = 14°. Хj - координата положения оси O1Y1 вдоль оси ОХ относительно точки О, определяемая по формуле X , X ,J ,J где y1 y 2 1 2 - параметры, зависящие от максимального хода ПЗ. Для ПЗ с ходом 1,5 м X y1 = 1,78 м, X y 2 = 0,3 м, J1 = 12°, J2 = 15°. Устройство, реализующее способ, работает следующим образом. Блок 1 осуществляет включение устройства в комплекс со всеми имитаторами тренажера. Блок 2 задает исходные данные b, h, g, J, J1, J2 , k J , Xy1, Xy 2 , поступающие в блоки 3, 4 и 5; Xвoj, Yвoj, Zвoj, Yср, поступающие в блок 5; Xнj, Zнj, поступающие в блок 7. Вычислитель имитатора акселерационных воздействий 8 формирует потребные перемещения ПДС, которые поступают в блоки 3, 4, 5 и 6. В блоке 3 вычисляется X J , в блоке 4 - Хy , в блоке 5 - Zg, которые поступают в блок 5, где вычисляются Xвj, Yвj, Zвj, поступающие в блок 7. В блоке 7 вычисляются I j, которые поступают как управляющие сигналы на ПЗ 9ДС. На фиг.2 представлены области предельных перемещений по крену ПДС в зависимости от угла тангажа ПДС с неизменяемым положением осей - кривая 2 - и с изменяемым положением осей вращения, рассчитанным по формулам 3, 4, 5 - кривая 1. Из сравнения этих кривых видно, что изменение положения осей вращения, например, при J = 15° расширяет диапазон по крену в два раза. Предлагаемый способ управления ПЗ-реализован на АНТК им. О.К.Антонова в имитаторах акселерационных воздействий тренажера самолета Ан-74 и исследовательского пилотажного стенда самолета Ан-70.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling the drives of a three-axis dynamical stand at angular displacements of the stand platform
Автори англійськоюSotnykov Dmytro Oleksiiovych, Kabaniachyi Volodymyr Volodymyrovych
Назва патенту російськоюСпособ управления приводами шестистепенного динамического стенда при угловых перемещениях платформы стенда
Автори російськоюСотников Дмитрий Алексеевич, Кабанячий Владимир Владимирович
МПК / Мітки
МПК: G09B 9/02
Мітки: спосіб, опорного, формуванні, переміщень, динамічного, платформи, кутових, ланками, шестиступеневого, стенда, управління, приводними, типу
Код посилання
<a href="https://ua.patents.su/5-23144-sposib-upravlinnya-privodnimi-lankami-shestistupenevogo-dinamichnogo-stenda-opornogo-tipu-pri-formuvanni-kutovikh-peremishhen-platformi.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління приводними ланками шестиступеневого динамічного стенда опорного типу при формуванні кутових переміщень платформи</a>
Спосіб управління приводними ланками шестиступеневого динамічного стенда опорного типу
Номер патенту: 20060
Опубліковано: 25.12.1997
Автори: Сотников Дмитро Олексійович, Кабанячий Володимир Володимирович
МПК: G09B 9/02
Мітки: динамічного, ланками, управління, спосіб, приводними, стенда, типу, опорного, шестиступеневого
Формула / Реферат:
Способ управления приводными звеньями шестистепенного динамического стенда опорного типа, заключающийся в том, что перемещением приводных звеньев создают линейные и угловые движения платформы динамического стенда относительно трех взаимно перпендикулярных осей вращения, отличающийся тем, что положения осей вращения по углам тангажа и рыскания задают в продольном направлении в пределах диапазона, который определяют из условия обеспечения...
Багатоелементний фотоприймач для перетворювачів лінійних та кутових переміщень в код
Номер патенту: 9135
Опубліковано: 30.09.1996
Автори: Богданович Віктор Борисович, Свєчніков Сергій Васильович, Кіяновський Олександр Павлович, Паламарчук Олександр Леонідович, Ушенін Юрій Валентинович
МПК: H03M 1/22
Мітки: фотоприймач, багатоелементний, переміщень, лінійних, кутових, код, перетворювачів
Формула / Реферат:
Многоэлементный фотоприемник для преобразователей линейных и угловых перемещений в код, содержащий диэлектрическую подложку с нанесенными на нее проводниками и расположенными между ними фоточувствительными и нефоточувст-вительными элементами в двоичном коде, отличающийся тем, что, с целью упрощения технологии изготовления многоэлеметного фотоприемника, в нем нефоточувствительные элементы выполнены в виде узких щелей в фоточувствительных...
Спосіб безконтактного вимірювання переміщень

Номер патенту: 356
Опубліковано: 30.04.1993
Автори: Маслій Володимир Миколайович, Меншиков Сергій Миколайович, Квашин Михайло Федорович, Росліков Олександр Фірсович, Метельов Леонід Дмитрович, Цибулько Вадим Йосипович, Зорін Олександр Сергійович
МПК: G01B 7/00
Мітки: переміщень, вимірювання, безконтактного, спосіб
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и яСпособ бесконтактного измерения перемещений, включающий преобразование параметров, вносимых токопроводящей поверхностью измеряемого объекта в катушку индуктивности автогенератора, в электрический сигнал, о т л и ч а ю щ и й с я тем, что, с целью повышения точности воспроизведения функциональной зависимости выходного сигнала от перемещения и расширения диапазона измерений, уменьшают чувствительность...
Диференційний індуктивний датчик переміщень
Номер патенту: 4143
Опубліковано: 27.12.1994
Автор: Нікітін Борис Михайлович
МПК: G01B 7/00
Мітки: датчик, переміщень, індуктивний, диференційний
Формула / Реферат:
Дифференциальный индуктивный датчик перемещений, содержащий якорь, охватывающий его сердечник и измерительный элемент, отличающийся тем, что, с целью повышения точности, якорь выполнен в виде прямоугольного диэлектрического бруса, разделенного по диагонали прямоугольным магнитопроводом, измерительный элемент выполнен в виде двух одинаковых одно-слойных индукторных катушек, размещенных в каркасах, каркасы установлены на противолежащих...
Акустоелектронний спосіб визначення переміщень об’єкта
Номер патенту: 3040
Опубліковано: 26.12.1994
Автори: Довгополий Анатолій Степанович, Жовнір Микола Федорович, Скрипник Юрій Олексійович, Скрипник Вікторія Іосифівна
МПК: G01B 17/00
Мітки: об'єкта, переміщень, визначення, акустоелектронний, спосіб
Формула / Реферат:
Акустоэлектронный способ определения перемещений объекта, заключающийся в том, что в неподвижной пьезоэлектрической пластине излучающим встречно-штыревым преобразователем возбуждают поверхностную акустическую волну, принимают ее приемным встречно-штыревым преобразователем, установленным на подвижной пьезоэлектрической пластине, предназначенной для связи с перемещаемым объектом, измеряют разность фаз между принятым и опорным сигналами и...
Попередній патент: Спосіб розпізнавання об’єкта за зональними інфрачервоними аерознімками
Наступний патент: Об’ємна роторна пневмомашина з шарнірним механізмом нагнітання, переважно, чотири- та двокамерна
Випадковий патент: Зливок