Сотников Дмитро Олексійович
Мобільний авіаційний тренажер
Номер патенту: 55318
Опубліковано: 17.03.2003
Автори: Харченко Володимир Петрович, Сотников Дмитро Олексійович, Бабак Віталій Павлович, Потемський Віталій Миколайович, Давидов Олександр Рубенович
МПК: G09B 9/02
Мітки: мобільній, авіаційний, тренажер
Формула / Реферат:
1. Мобільний авіаційний тренажер, який містить макет кабіни на базовій площадці та імітатори систем об'єкта, який відрізняється тим, що між макетом кабіни і базовою площадкою встановлені послідовно з'єднані жорстка рама з вузлами кріплення і транспортування і силовий каркас із шарнірними опорами.2. Мобільний авіаційний тренажер за п. 1, який відрізняється тим, що жорстка рама виконана у вигляді квадрата з подовжнього і поперечного...
Спосіб імітації акселераційних відчуттів

Номер патенту: 43938
Опубліковано: 15.01.2002
Автори: Тимаков Володимир Михайлович, Башкатов Віктор Кіндратійович, Клюєв Борис Володимирович, Кабанячий Володимир Володимирович, Юрченко Юрій Васильович, Сотников Дмитро Олексійович
МПК: G09B 9/02
Мітки: відчуттів, акселераційних, спосіб, імітації
Текст:
Спосіб управління приводними ланками шестиступеневого динамічного стенда опорного типу при формуванні кутових переміщень платформи
Номер патенту: 23144
Опубліковано: 30.06.1998
Автори: Кабанячий Володимир Володимирович, Сотников Дмитро Олексійович
МПК: G09B 9/02
Мітки: шестиступеневого, спосіб, управління, кутових, формуванні, переміщень, ланками, опорного, типу, платформи, приводними, динамічного, стенда
Формула / Реферат:
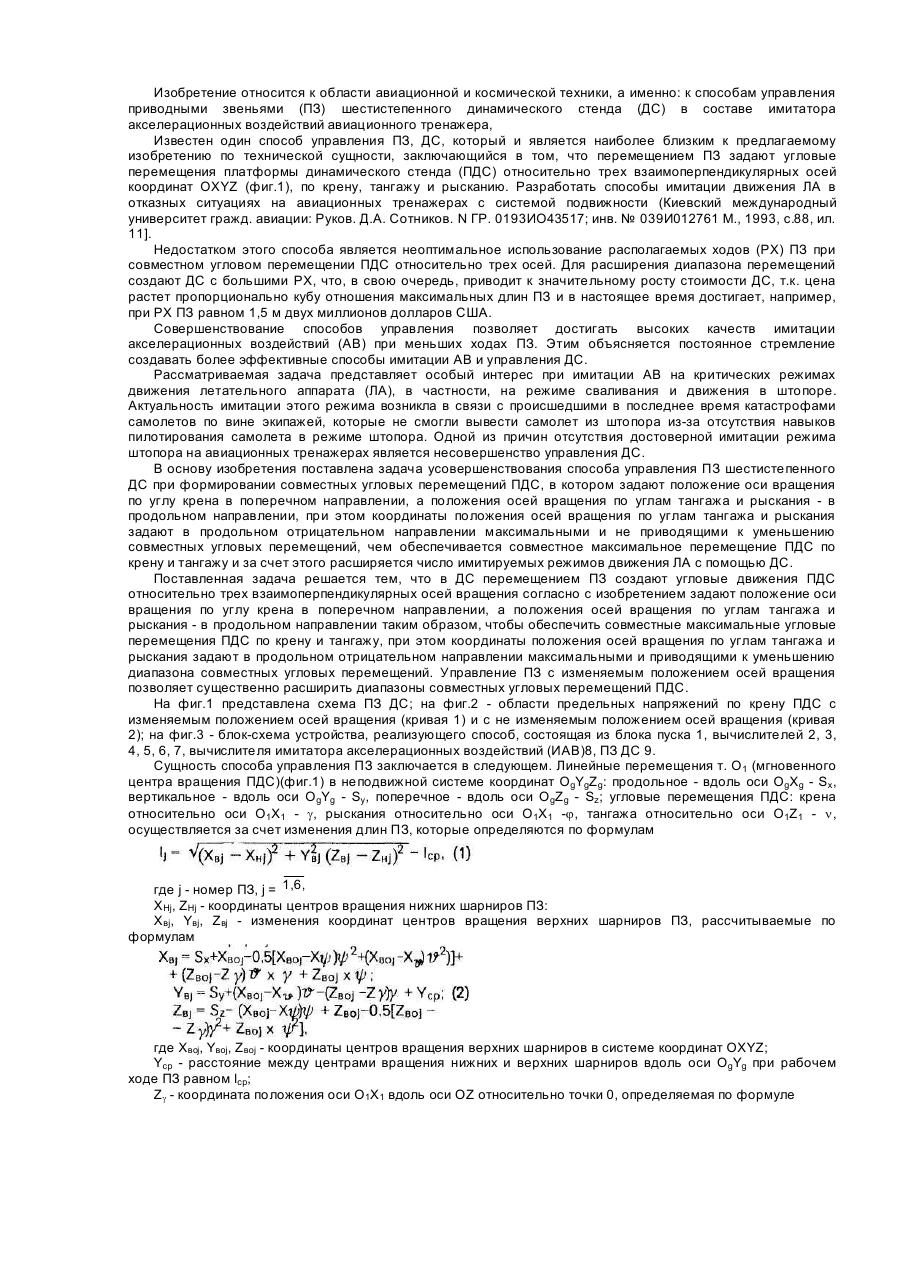
Способ управления приводными звеньями шестистепенного динамического стенда опорного типа при формировании угловых перемещений платформы, заключающийся в том, что перемещением приводных звеньев задают угловые движения платформы динамического стенда относительно трех взаимоперпендикулярных осей вращения, отличающийся тем, что задают положение оси вращения по углу крена в поперечном направлении, а положения осей вращения по углам тангажа и...
Спосіб управління приводними ланками шестиступеневого динамічного стенда опорного типу
Номер патенту: 20060
Опубліковано: 25.12.1997
Автори: Кабанячий Володимир Володимирович, Сотников Дмитро Олексійович
МПК: G09B 9/02
Мітки: шестиступеневого, приводними, управління, ланками, стенда, динамічного, типу, опорного, спосіб
Формула / Реферат:
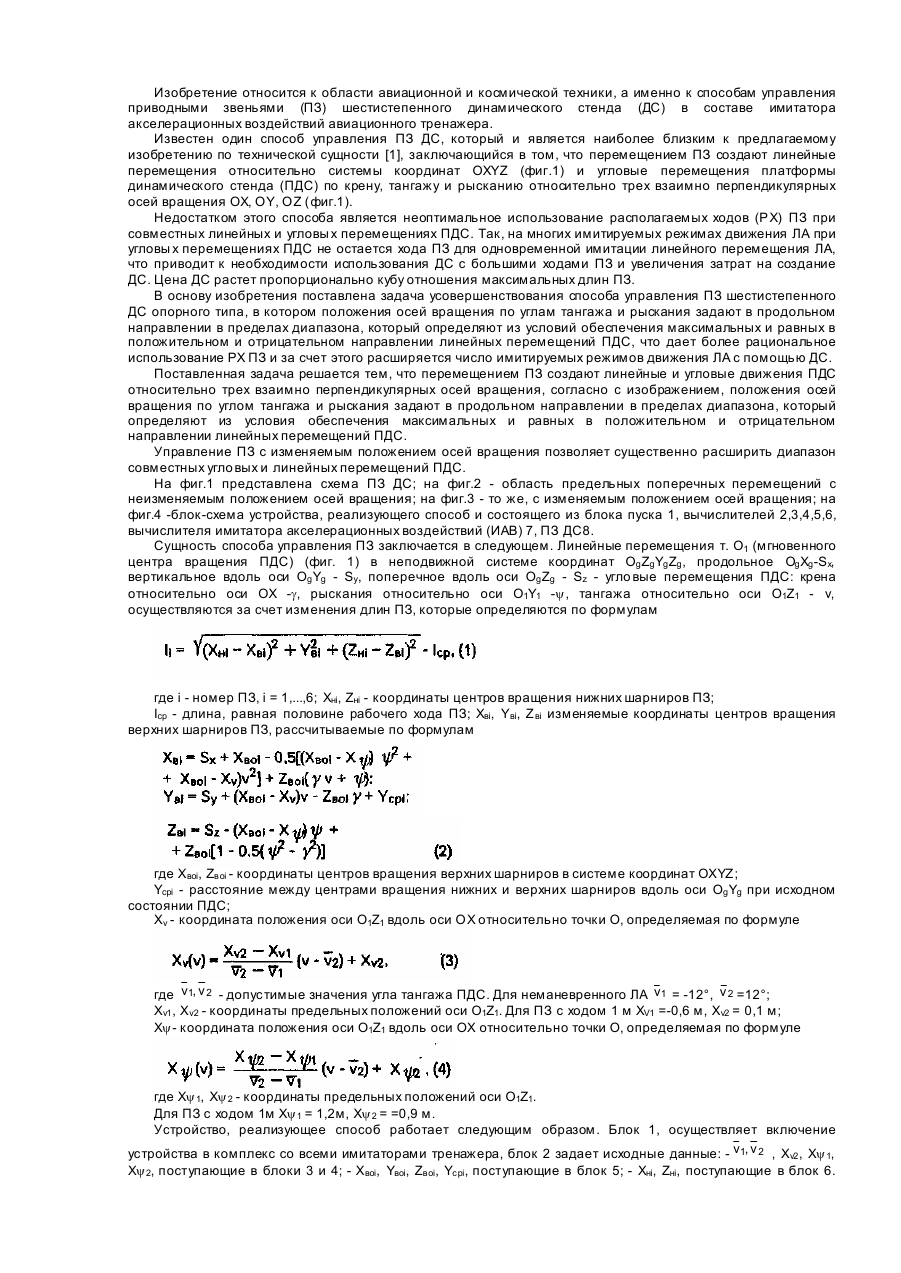
Способ управления приводными звеньями шестистепенного динамического стенда опорного типа, заключающийся в том, что перемещением приводных звеньев создают линейные и угловые движения платформы динамического стенда относительно трех взаимно перпендикулярных осей вращения, отличающийся тем, что положения осей вращения по углам тангажа и рыскания задают в продольном направлении в пределах диапазона, который определяют из условия обеспечения...